Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к технической области окулографии и, в частности, к способу и устройству для калибровки при окулографии.
Предшествующий уровень техники настоящего изобретения
По мере развития науки и технологии, технология окулографии стала применяться все более и более широко. Например, она может использоваться для выполнения, с помощью линии взора, определения координат при взаимодействии с терминальными устройствами, выполняющими определение координат точки взора (такие устройства называются отслеживателями положения глаз), примерами таких устройств являются компьютеры для виртуальной реальности (BP), дополненной реальности (ДР) и планшетные компьютеры для окулографии.
Поскольку имеются некоторые различия в физиологических структурах глаз каждого пользователя, в известном уровне техники перед использованием устройства отслеживателя положения глаз с функцией окулографии пользователю обычно нужно сначала выполнить процедуру калибровки. Когда пользователь фокусирует свой взор на рассматривании одной калибровочной точки, одновременно собирается информация о параметрах глаз и выполняются соответствующие вычисления согласно координатам калибровочной точки и информации о параметрах глаз, чтобы получить персональный калибровочный коэффициент для пользователя. После завершения процедуры калибровки будет показан экран с набором точек, и пользователь сам оценивает результат калибровки, и если пользователь субъективно считает, что результат калибровки не соответствуют требованиям определения координат точки взора, то потребуется повторная процедура калибровки.
После завершения процедуры калибровки пользователь переходит к сценарию выполнения определения координат точки взора. Если пользователь в процессе работы определит, что определение координат точки взора не является точным, или если относительное положение нашлемного дисплея и глаз изменится из-за регулировки положения нашлемного дисплея или тому подобного, то пользователю нужно выйти из сценария и снова вернутся к процедуре калибровки, что представляет неудобства для пользователя.
Краткое раскрытие настоящего изобретения
По меньшей мере, в некоторых вариантах осуществления настоящего изобретения предложены способ и устройство для калибровки при окулографии, позволяющие, по меньшей мере, частично выполнить калибровку в сценарии взаимодействия с определением координат точки взора, так что не требуется отдельная процедура калибровки.
Согласно одному варианту осуществления настоящего изобретения предложен способ калибровки для окулографии, который предусматривает стадии:
если в операции взаимодействия пользователь выбрал режим взаимодействия, который является режимом взаимодействия без определения координат точки взора, то выполняется запуск способа фоновой калибровки;
получение информации о параметрах глаз пользователя в способе фоновой калибровки;
получение координат места и настройка координат места в качестве координат точки калибровки, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора; и
вычисление текущего значения персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки.
Согласно дополнительному варианту осуществления способ дополнительно предусматривает стадии: перед запуском способа фоновой калибровки получение информации о параметрах глаз пользователя; вычисление координат точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту, причем целевой калибровочный коэффициент включает в себя системный калибровочный коэффициент по умолчанию, или персональный калибровочный коэффициент, ассоциированный с пользовательским идентификатором пользователя; отображение результата взаимодействия с функциональным участком, к которому принадлежат координаты точки взора; и если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и, определение координат других функциональных участков проводилось устройством взаимодействия без определения координат точки взора, то устанавливается, что режим взаимодействия, использованный в настоящей операции взаимодействия, является режимом взаимодействия без определения координат точки взора.
Согласно дополнительному варианту осуществления пользовательский идентификатор является целевым пользовательским идентификатором; перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента способ дополнительно предусматривает стадии: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным системному калибровочному коэффициенту по умолчанию.
Согласно дополнительному варианту осуществления после вычисления текущего персонального калибровочного коэффициента способ дополнительно предусматривает стадии: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, обновление персонального калибровочного коэффициента, ассоциированного с целевым пользовательским идентификатором, до текущего персонального калибровочного коэффициента; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, ассоциирование текущего персонального калибровочного коэффициента с целевым пользовательским идентификатором.
Согласно дополнительному варианту осуществления пользовательский идентификатор связан с биометрическими параметрами; перед вычислением координат точки взора пользователя с помощью использования целевого калибровочного коэффициента способ дополнительно предусматривает стадии: получение биометрических параметров пользователя; сопоставление биометрических параметров пользователя с биометрическими параметрами созданного пользовательского идентификатора; если сопоставление было успешным, то пользовательский идентификатор пользователя устанавливается равным успешно сопоставленному пользовательскому идентификатору; а если сопоставление не было успешным, выполняется создание пользовательского идентификатора для пользователя, и связывание созданного пользовательского идентификатора с биометрическими параметрами пользователя.
Согласно одному варианту осуществления настоящего изобретения дополнительно предложено устройство для калибровки при окулографии, которое включает в себя:
блок запуска фоновой калибровки, выполненный с возможностью осуществления запуска способа фоновой калибровки в операции взаимодействия, если пользователем был выбран режим взаимодействия, который является режимом взаимодействия без определения координат точки взора;
блок сбора, выполненный с возможностью получения информации о параметрах глаз пользователя в способе фоновой калибровки; и
блок калибровки, выполненный с возможностью получения координат места и настройки координат места в качестве координат точки калибровки, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора; и вычисления текущего персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки.
Согласно дополнительному варианту осуществления, вышеупомянутое устройство дополнительно включает в себя: блок вычисления, выполненный с возможностью перед запуском способа фоновой калибровки получить информации о параметрах глаз пользователя, и вычислить координаты точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту, причем целевой калибровочный коэффициент включает в себя системный калибровочный коэффициент по умолчанию, или персональный калибровочный коэффициент, ассоциированный с пользовательским идентификатором пользователя; блок дисплея, выполненный с возможностью отображать результат взаимодействия с функциональным участком, к которому принадлежат координаты точки взора; и блок отслеживания, выполненный с возможностью определить, что режим взаимодействия, использованный в настоящей операции взаимодействия, является режимом взаимодействия без определения координат точки взора, если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и определение координат других функциональных участков проводится устройством взаимодействия без определения координат точки взора.
Согласно дополнительному варианту осуществления пользовательский идентификатор пользователя является целевым пользовательским идентификатором; блок калибровки дополнительно выполнен с возможностью: если перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным системному калибровочному коэффициенту по умолчанию.
Согласно дополнительному варианту осуществления после вычисления текущего персонального калибровочного коэффициента блок калибровки дополнительно выполнен с возможностью: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, провести обновление персонального калибровочного коэффициента, ассоциированного с целевым пользовательским идентификатором, до текущего персонального калибровочного коэффициента; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, провести ассоциирование текущего персонального калибровочного коэффициента с целевым пользовательским идентификатором.
Согласно дополнительному варианту осуществления пользовательский идентификатор связан с биометрическими параметрами; устройство дополнительно включает в себя: биометрический блок, выполненный с возможностью перед вычислением координат точки взора пользователя с помощью использования целевого калибровочного коэффициента провести получение биометрических параметров пользователя; провести сопоставление биометрических параметров пользователя с биометрическими параметрами созданного пользовательского идентификатора; если сопоставление было успешным, установить успешно сопоставленный пользовательский идентификатор в качестве пользовательского идентификатора пользователя; а если сопоставление не было успешным, создать пользовательский идентификатор для пользователя, и связать созданный пользовательский идентификатор с биометрическими параметрами пользователя.
Согласно одному варианту осуществления настоящего изобретения дополнительно предложено устройство калибровки для окулографии, включающее в себя: процессор, память, компьютерную программу, которая хранится в памяти и выполняется в процессоре, причем при выполнении компьютерной программы процессор выполнен с возможностью реализовать стадии вышеупомянутого способа калибровки для окулографии.
Согласно одному варианту осуществления настоящего изобретения дополнительно предложен носитель данных, причем, по меньшей мере, одна выполняемая компьютером программа хранится на носителе данных, и когда она загружена и выполняется компьютером, по меньшей мере, одна выполняемая компьютером программа выполнена с возможностью реализовать стадии вышеупомянутого способа калибровки для окулографии.
Согласно, по меньшей мере, некоторым вариантам осуществления настоящего изобретения, в сценарии применения окулографии для взаимодействия, если пользователем для определения координат был выбран режим взаимодействия без определения координат точки взора, то одновременно запускается способ фоновой калибровки, и в способе фоновой калибровки координаты места, которые получены посредством выполнения определения координат в режиме взаимодействия без определения координат точки взора, берутся в качестве координат точки калибровки, для того, чтобы вычислить персональный калибровочный коэффициент. Согласно вариантам осуществления настоящего изобретения способ фоновой калибровки скрыт от пользователя, так что пользователь не осознает способа фоновой калибровки, и у пользователя нет необходимости выходить из текущего сценария для выполнения повторной калибровки как в известном уровне техники, тем самым экономится время калибровки, и улучшаются впечатления пользователя.
Краткое описание фигур
Для более понятной иллюстрации технических решений в вариантах осуществления настоящего изобретения или в известном уровне техники, ниже приведено краткое описание фигур, которые нужны для описания вариантов осуществления или известного уровня техники. Очевидно, что фигуры в описании ниже относится к некоторым вариантом осуществления настоящего изобретения, и на их основании другие фигуры могут быть получены специалистами обычной квалификации в этой области техники без каких-либо творческих усилий.
На фиг. 1 показана блок-схема алгоритма способа калибровки для окулографии согласно одному варианту осуществления настоящего изобретения.
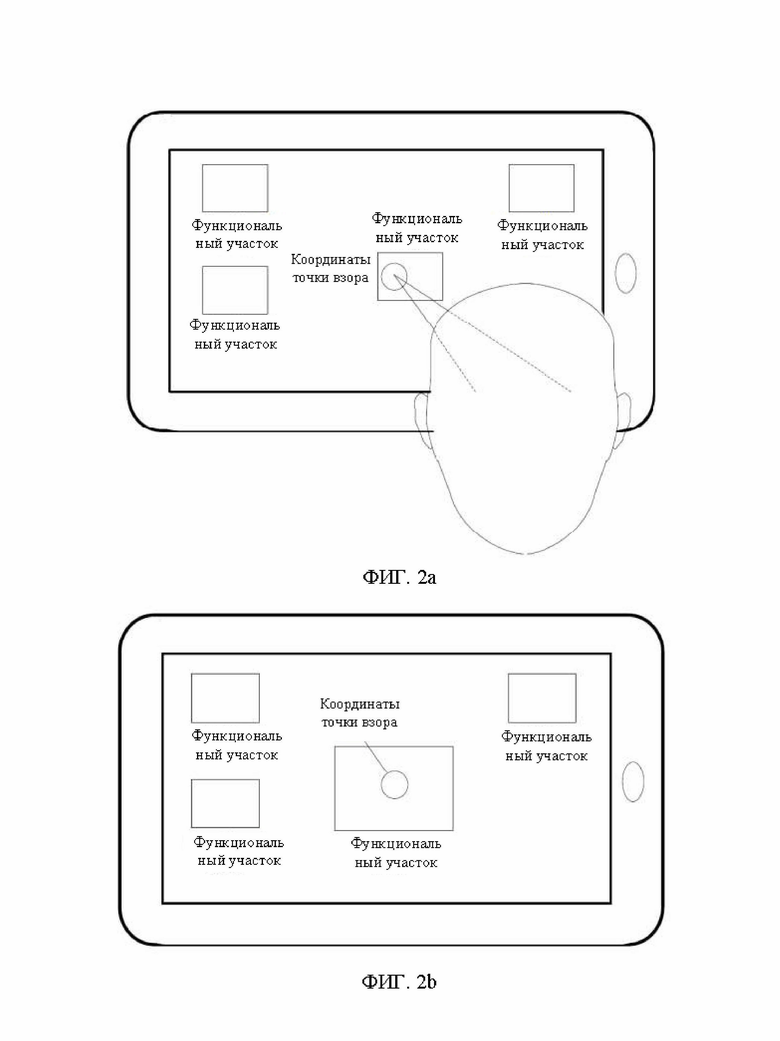
На фиг. 2а схематично показано получение координат точки взора в режиме взаимодействия с определением координат точки взора согласно одному варианту осуществления настоящего изобретения.
На фиг. 2б схематично показано расширение функционального участка, к которому принадлежат координаты точки взора, согласно одному варианту осуществления настоящего изобретения.
На фиг. 3 показана блок-схема алгоритма другого способа калибровки для окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 4 показана блок-схема алгоритма еще одного другого способа калибровки для окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 5 показана блок-схема алгоритма еще одного другого способа калибровки для окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 6 показана блок-схема алгоритма еще одного другого способа калибровки для окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 7 показана структурная схема устройства для калибровки при окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 8 показана структурная схема другого устройства для калибровки при окулографии согласно одному варианту осуществления настоящего изобретения.
На фиг. 9 показана структурная схема еще одного другого устройства для калибровки при окулографии согласно одному варианту осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
Ниже будет приведено понятное и полное описание технических решений согласно вариантам осуществления настоящего изобретения, вместе с фигурами согласно вариантам осуществления настоящего изобретения. Очевидно, что описанные ниже варианты осуществления являются частью вариантов осуществления настоящего изобретения, а не всеми ими. Все другие варианты осуществления, полученные специалистами обычной квалификации в этой области техники на основании вариантов осуществления настоящего изобретения без каких-либо творческих усилий, попадают в объем правовой охраны настоящего изобретения.
Термины «первый» и «второй» и тому подобные в описании и в пунктах формулы настоящего изобретения и в вышеупомянутых фигурах используются для различения разных объектов, а не для описания конкретного порядка. Кроме того, термины «содержащий», «имеющий» и любые их варианты предназначены для охватывания неэксклюзивных включений. Например, способ, система, изделие или устройство, которые предусматривают ряд стадий или содержит ряд блоков, не ограничены перечисленными стадиями или блоками, а могут предусматривать или содержать стадии или элементы, которые не были перечислены.
Способ для калибровки при окулографии и устройство для калибровки при окулографии, предложенные в вариантах осуществления настоящего изобретения, применяются в области окулографии. Окулографию можно также называть отслеживанием линии взора, она представляет из себя технологию для оценки линии взгляда и/или точки взора глаз посредством определения состояния движения глаз.
Устройство для калибровки при окулографии, используемое в вариантах осуществления настоящего изобретения, может быть задействовано в конечных устройствах, осуществляющих определение координат точки взора (называемыми отслеживателями положения глаз), например в системе BP, в устройстве ДР и в планшетном компьютере для окулографии.
Система BP обычно включает в себя множество устройств, например, моноблочный персональный компьютер (ПК) для BP + рукоятка/дистанционный контроллер, терминал ПК + нашлемный дисплей для BP (программное обеспечение BP установлено на терминале ПК для обмена данными с нашлемным дисплеем) + рукоятка/дистанционный контроллер/мышь и интеллектуальный мобильный терминал + нашлемный дисплей (программное обеспечение BP установлено на интеллектуальном мобильном терминале для обмена данными с нашлемным дисплеем) и т.п.
Вышеупомянутое устройство для калибровки при окулографии может быть выполнено в виде планшетного компьютера для окулографии. Для того чтобы собирать изображение глаз пользователя, планшетный компьютер для окулографии может также быть оснащен источником и камерой инфракрасного света, которая выполнена с возможностью захватывать изображение глаз (например, как камера окружения и как инфракрасная камера). Изображением глаз здесь называется изображение, которое включает в себя в глаза, например, вид головы в фас, вид головы в профиль или изображение, в котором содержатся глаза.
Или устройство для калибровки при окулографии может быть выполнено на базе вышеупомянутого нашлемного дисплея ВР/ДР для окулографии. Устройство для отслеживания линии взора (или устройство для окулографии) также устанавливается на нашлемном дисплее. Кроме устройства для окулографии, в котором используется захватывающая изображение глаз камера и источник инфракрасного света, можно также использовать другое устройство для окулографии, например, микроэлектромеханическую систему (МЭМС), которая может в частном случае содержать в себе инфракрасные сканирующие зеркала МЭМС, инфракрасный источник света и инфракрасный приемник, и которая может обнаружить движения глазного яблока посредством захвата изображения глаз. В качестве другого примера, устройство для отслеживания линии взора может также быть емкостным датчиком, который обнаруживает движения глазного яблока посредством измерения значения емкости между глазами и пластиной конденсатора; и в качестве другого примера, устройство для отслеживания линии взора может также быть прибором для измерения тока мышц. Более конкретно, при размещении электродов на переносице, лбу, ушах или мочках уха, движения глазного яблока обнаруживаются по измерению сигналов тока мускулов.
Варианты осуществления настоящего изобретения будут подробно описаны далее на основании общих особенностей настоящего изобретения, которые описаны выше.
Первый вариант осуществления
С целью решения проблем в существующем режиме калибровки, когда если пользователь обнаружит, что определение координат точки взора не является точным в сценарии применения взаимодействия для определения координат точки взора, или если относительное положение нашлемного дисплея и глаз изменится из-за регулировки положения нашлемного дисплея или тому подобного, то пользователю нужно выйти из сценария для выполнения новый калибровки.
Согласно первому варианту осуществления настоящего изобретения предложен способ калибровки при окулографии, чтобы выполнить калибровку в сценарии взаимодействия с определением координат точки взора, так что не требуется отдельная процедура калибровки.
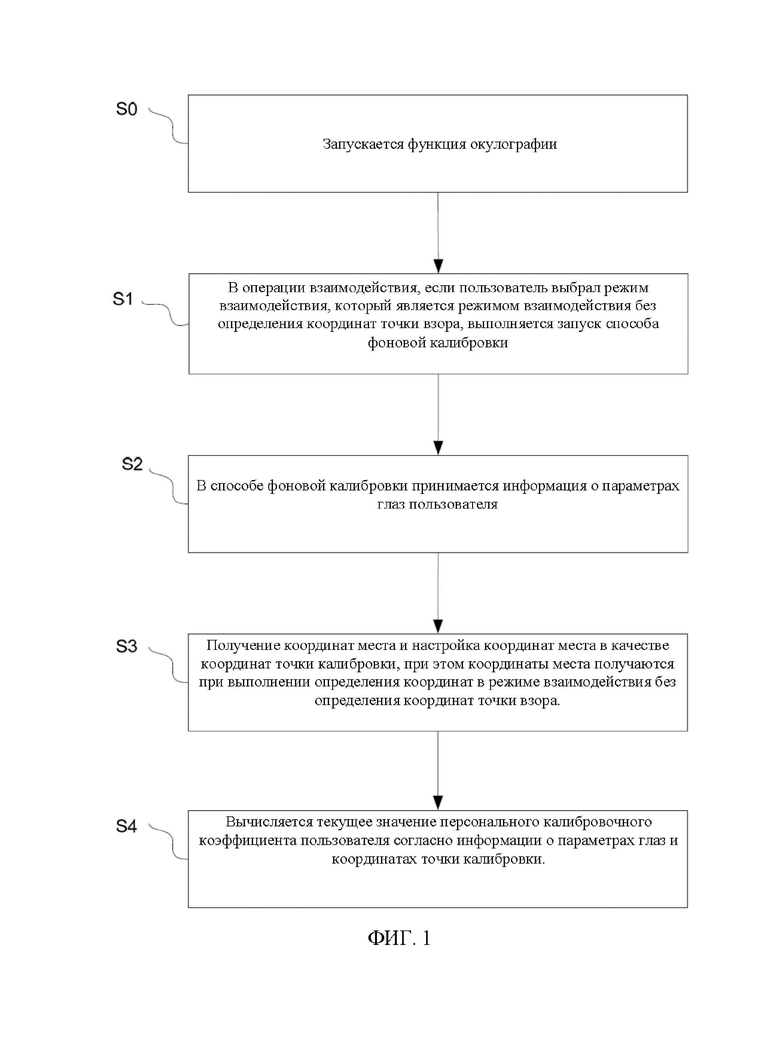
Как показано на фиг. 1, способ калибровки при окулографии предусматривает следующие стадии.
На стадии S0 запускается функция окулографии.
Например, по умолчанию запускается функция окулографии на устройстве отслеживателя положения глаз.
Конечно, функция окулографии может также быть запущена согласно действиям пользователя.
На стадии S2 в операции взаимодействия, если пользователь выбрал режим взаимодействия, который является режимом взаимодействия без определения координат точки взора, то выполняется запуск способа фоновой калибровки.
Операция взаимодействия означает, что после приема информации и рабочих команд, введенных пользователем с помощью подсистемы ввода и вывода, система обрабатывает информацию и рабочие команды, и результат обработки отображается с помощью подсистемы ввода и вывода.
Впоследствии пользователь может далее вводить информацию и рабочие команды согласно результату обработки.
Если взять в качестве примера сценарий BP, в нем координаты точки взора обычно по умолчанию определяются в режиме взаимодействия с определением координат точки взора (как показано на фиг. 2а).
Отображаются результаты взаимодействия, например, увеличение (как показано на фиг. 2б), изменение цвета и повышение яркости функционального участка, к которому принадлежат координаты точки взора. Указанный здесь функциональный участок включает, помимо прочего, пиктограммный элемент управления, пространственный участок, виртуальный объект (например, в игре BP пользователь может пройти к назначенному пространственному участку или выбрать виртуальный объект, который пользователь желает схватить с помощью определения координат точки взора).
Вышеупомянутые мышь, дистанционный контроллер, рукоятка или даже клавиатура терминала ПК могут также быть применены для взаимодействия человека с компьютером. В сравнении с режимом взаимодействия с определением координат точки взора, такие режимы взаимодействия можно совместно назвать режимом взаимодействия без определения координат точки взора. А мышь, дистанционный контроллер, рукоятка, клавиатура и тому подобное можно совместно называть устройствами взаимодействия без определения координат точки взора.
Если пользователь применяет режим взаимодействия без определения координат точки взора, то выполняется способ фоновой калибровки, который скрыт от пользователя и не будет восприниматься пользователем.
На стадии S2 в способе фоновой калибровки принимается информация о параметрах глаз пользователя.
В качестве примера, информация о параметрах глаз может включать в себя координаты положения зрачка, форму зрачка, место расположения радужной оболочки глаза, форму радужной оболочки глаза, место расположения века глаза, место расположения угла глазной щели, координаты мест расположения пятен отражения от роговой оболочки глаза и т.п.
Конкретно, после установки устройства для калибровки при окулографии на мобильном терминальном устройстве изображение глаз может быть захвачено камерой мобильного терминального устройства, и изображение глаза обрабатывается для получения информации о параметрах глаз.
Если устройство для калибровки при окулографии было установлено на нашлемном дисплее BP или ДР, то изображение глаз может быть захвачено устройством для отслеживания линии взора, установленном на нашлемном дисплее ВР/ДР, и изображение глаза обрабатывается для получения информации о параметрах глаз.
На стадии S3 выполняется получение координат места и настройка координат места в качестве координат точки калибровки, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора.
Если взять рукоятку в качестве примера, то после того, как пользователь с помощью рукоятки переместит курсор в определенное место и щелкнет ОК, полученные в этот момент времени координаты места принимаются в качестве координат точки калибровки.
В отличие от имеющегося уровня техники, согласно варианту реализации настоящего изобретения, фиксированная точка калибровки не отображается, и пользователю не надо фокусировать свое внимание на рассматривании фиксированной точки калибровки. При этом используется то место, в которое направлен взор пользователя, и которое рука пользователя достигает, когда пользователь использует устройство взаимодействия без определения координат точки взора, например, рукоятку и мышь. Таким образом, координаты места, которые были получены при выполнении определения координат точки в режиме взаимодействия без определения координат точки взора, являются координатами точки, на которую смотрит пользователь.
На стадии S4 вычисляется текущее значение персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки.
Персональный калибровочный коэффициент является параметром, который используется для вычисления окончательного результата линии взора в алгоритме оценки линии взора, и он связан с данными, например, с радиусом зрачка глаза пользователя, с кривизной поверхности роговой оболочки глаза, с угловой разницей между зрительной осью и оптической осью.
Предложен следующий принцип вычисления персонального калибровочного коэффициента.
Согласно информации о параметрах глаз и координатах точки калибровки значение персонального калибровочного коэффициента может быть найдено при решении обратной задачи относительно алгоритма оценки линии взора. После получения текущего значения персонального калибровочного коэффициента, можно использовать его вместо предыдущего персонального калибровочного коэффициента или заменить им обычный коэффициент по умолчанию, так что точность окулографии повысится.
Следовательно, согласно варианту осуществления настоящего изобретения, в сценарии применения окулографии для взаимодействия, если пользователь выберет для определения координат режим взаимодействия без определения координат точки взора, то одновременно запускается способ фоновой калибровки, и в способе фоновой калибровки координаты места, которые получены посредством выполнения определения координат в режиме взаимодействия без определения координат точки взора, берутся в качестве координат точки калибровки, для того, чтобы вычислить персональный калибровочный коэффициент. Посредством способа фоновой калибровки в варианте осуществления настоящего изобретения значение персонального калибровочного коэффициента пользователя можно непрерывно обновлять, так что окулография станет более точной. Кроме того, способ калибровки скрыт от пользователя, так что пользователь не осознает способа калибровки, и у пользователя нет необходимости выходить из текущего сценария для выполнения повторной калибровки как в известном уровне техники, тем самым экономится время калибровки и улучшаются впечатления пользователя.
Второй вариант осуществления
В общем случае в технологии окулографии может быть настроен калибровочный коэффициент по умолчанию. Калибровочный коэффициент по умолчанию является тем калибровочным коэффициентом, который дает наивысшую точность при использовании большинством людей.
Конечно, вследствие индивидуальных отличий, например, в радиусе глазного яблока пользователя, имеется вероятность неточного определения координат при использовании калибровочного коэффициента по умолчанию, что также является причиной для выполнения калибровки с целью получения персонального калибровочного коэффициента.
Можно определить, что целевой калибровочный коэффициент принимает значение системного калибровочного коэффициента по умолчанию, или персонального калибровочного коэффициента, ассоциированного с пользовательским идентификатором пользователя.
В начале работы целевой калибровочный коэффициент является системным калибровочным коэффициентом по умолчанию, а после, по меньшей мере, одной фоновой калибровки целевой калибровочный коэффициент обновляется до текущего значения персонального калибровочного коэффициента.
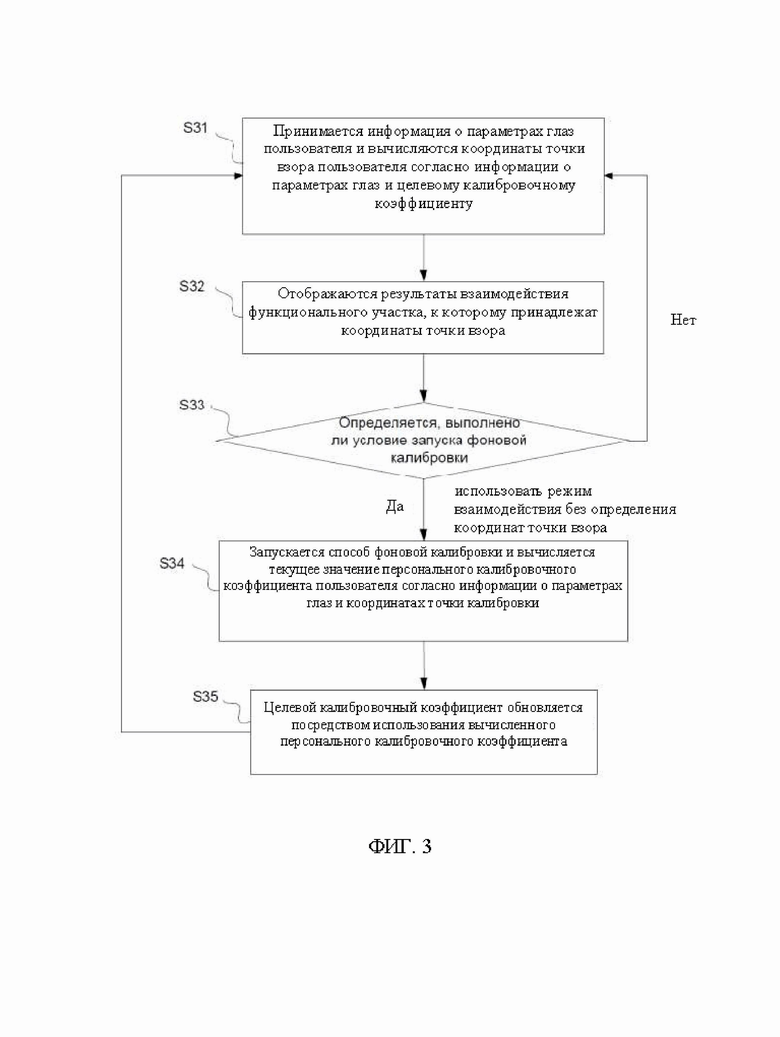
В настоящем варианте осуществления будет введен приводимый в качестве примера (иллюстративный) способ калибровки в окулографии, основанный на целевом калибровочном коэффициенте в сценарии, в котором по умолчанию используется режим взаимодействия с определением координат точки взора. Как показано на фиг. 3, приводимый в качестве примера (иллюстративный) способ предусматривает следующие стадии.
На стадии S31 принимается информация о параметрах глаз пользователя и вычисляются координаты точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту.
Что касается режима приема данных, можно посмотреть стадию S2 в предшествующем первом варианте осуществления.
Имеется множество алгоритмов отслеживания движения глаз для вычисления координат точки взора. Например, алгоритм отслеживания движения глаза на основе места расположения и формы зрачка глаза вычисляет информацию о взоре с помощью направления главной оси зрачка глаза и места расположения зрачка глаза.
В качестве другого примера, принцип работы способа подгонки некоторых векторов параметров предусматривает следующие стадии.
Извлекаются место расположения центра зрачка глаза, место расположения центра левого угла глазной щели и место расположения центра правого угла глазной щели.
Место расположения центра левого угла глазной щели вычитается из места расположения центра зрачка глаза для получения вектора А параметров.
Место расположения центра правого угла глазной щели вычитается из места расположения центра зрачка глаза для получения вектора В параметров.
Создается функция сопоставления (набор нескольких формул) для вектора А, вектора В и точки взора.
На основании указанных векторов А и В параметров и известной информации о точке взора выполняется подгонка полиномом для определения неизвестных коэффициентов функции сопоставления, и неизвестные коэффициенты можно определить во время выполнения способа калибровки.
После определения значений неизвестных коэффициентов извлеченные в данное время векторы параметров вводятся в функцию сопоставления для нахождения текущей точки взора (этот способ является способом отслеживания).
Более конкретно, данные параметров включают в себя: место расположения зрачка глаза, форму зрачка глаза, место расположения радужной оболочки глаза, форму радужной оболочки глаза, место расположения века глаза, место расположения угла глазной щели, координаты места расположения пятна и т.п.
У различных алгоритмов отслеживания движение глаза могут быть различные требования к категории данных параметров. Например, в вышеупомянутом алгоритме отслеживания движения глаза на основе места расположения и формы зрачка глаза подлежащие извлечению данные параметров включают в себя направление главной оси зрачка глаза, место расположения и форму зрачка глаза, длину длинной оси зрачка глаза, длину короткой оси зрачка глаза и т.п.
В другом примере, в вышеупомянутом способе подгонки векторов параметров подлежащие извлечению данные параметров включают в себя место расположения центра зрачка глаза, место расположения центра левого угла глазной щели и место расположения центра правого угла глазной щели.
Так как имеется много типов алгоритмов отслеживания движения глаза, в настоящем документе не будет приведено никаких повторяющихся описаний.
Следует отметить, что если пользователь является новым пользователем, или если пользовательский идентификатор или пользователь не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент является калибровочным коэффициентом по умолчанию.
На стадии S32 отображаются результаты взаимодействия функционального участка, к которому принадлежат координаты точки взора.
Более конкретно, отображаются результаты взаимодействия, например, увеличение (как показано на фиг. 2б), изменение цвета и повышение яркости функционального участка, к которому принадлежат координаты точки взора. Здесь функциональный участок может быть пиктограммным элементом управления, пространственным участком, виртуальным объектом и т.п.
Стадии с S31 до S32 являются операцией взаимодействия.
Если пользователь будет считать, что функциональный участок, результат интерактивного взаимодействия с которым отображается, является ожидаемым функциональным участком, то пользователь войдет на этот функциональный участок с помощью непрерывного рассматривания и нажатия клавиши.
Однако если пользователь будет считать, что функциональный участок, результат интерактивного взаимодействия с которым отображается, не является ожидаемым функциональным участком (это указывает, что точность вычисления координат точки взора в данное время не соответствует требованиям пользователя), то пользователь может переместить точку фокусировки внимания на экране для нового определения координат с помощью режимов взаимодействия без определения координат точки обзора, например, с помощью мыши, дистанционного контроллера, рукоятки и клавиатуры терминала ПК.
На стадии S33 определяется, соблюдено ли условие запуска фоновой калибровки, и если условие запуска фоновой калибровки было соблюдено, то выполняется переход на стадию S34, а если условие запуска фоновой калибровки не было соблюдено, то выполняется переход на стадию S31.
Условие запуска фоновой калибровки может включать в себя следующее: если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и координаты других функциональных участков определены с применением устройства взаимодействия без определения координат точки взора.
Когда условие запуска фоновой калибровки было соблюдено, и определено, что режим взаимодействия, использованный в текущий операции взаимодействия, является режимом взаимодействия без определения координат точки взора, то после этого будет выполнен способ фоновой калибровки и полученное значение текущего персонального калибровочного коэффициента будет присвоено целевому калибровочному коэффициенту.
Однако если условие запуска фоновой калибровки не было соблюдено, что указывает, что текущая точность определения координат точки взора соответствует требованиям пользователя, то нет необходимости изменять целевой калибровочный коэффициент, и тогда выполнение способа возвращается непосредственно к стадии S31.
На стадии S34 запускается способ фоновой калибровки и вычисляется текущее значение персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки.
Для конкретного описания можно посмотреть описание вышеупомянутых стадий S2-S4 и поэтому оно не будет повторяться здесь.
На стадии S35 целевой калибровочный коэффициент обновляется посредством использования вычисленного персонального калибровочного коэффициента, и выполняется возврат на стадию S31.
После использования для определения координат устройства взаимодействия без определения координат точки взора будет снова использоваться режим взаимодействия с определением координат точки взора.
Согласно настоящему варианту осуществления, в каждой операции взаимодействия на основании определения координат точки взора, калибровочный коэффициент по умолчанию или ассоциированный с пользователем персональный калибровочный коэффициент используется для вычисления координат точки взора, а функциональный участок, к которому принадлежат координаты точки взора, выделяется подсветкой.
Если выделенный подсветкой функциональный участок является ожидаемым функциональным участком для пользователя, пользователь может подтвердить вход на этот функциональный участок его непрерывным рассматриванием, нажатием клавиши и так далее.
Однако если выделенный подсветкой функциональный участок не является ожидаемым функциональным участком для пользователя, пользователь будет выполнять определение координат посредством использования устройства взаимодействия без определения координат точки взора, например, рукоятки, и одновременно запускается способ фоновой калибровки. Следовательно, в дополнение к реализации взаимодействия человека с компьютером, в данном варианте осуществления можно также определить, надо ли или нет запускать способ фоновой калибровки.
Во втором варианте осуществления упомянут пользовательский идентификатор пользователя. Для удобства пользовательский идентификатор текущего пользователя можно назвать целевым пользовательским идентификатором.
Перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента способ дополнительно может предусматривать следующие стадии.
Если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; и
Если пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному системному калибровочному коэффициенту по умолчанию.
Кроме того, после вычисления текущего персонального калибровочного коэффициента можно также выполнить следующие операции.
Если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то персональный калибровочный коэффициент, ассоциированный с целевым пользовательским идентификатором, обновляется до значения текущего персонального калибровочного коэффициента.
Если пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то текущий персональный калибровочный коэффициент ассоциируется с целевым пользовательским идентификатором.
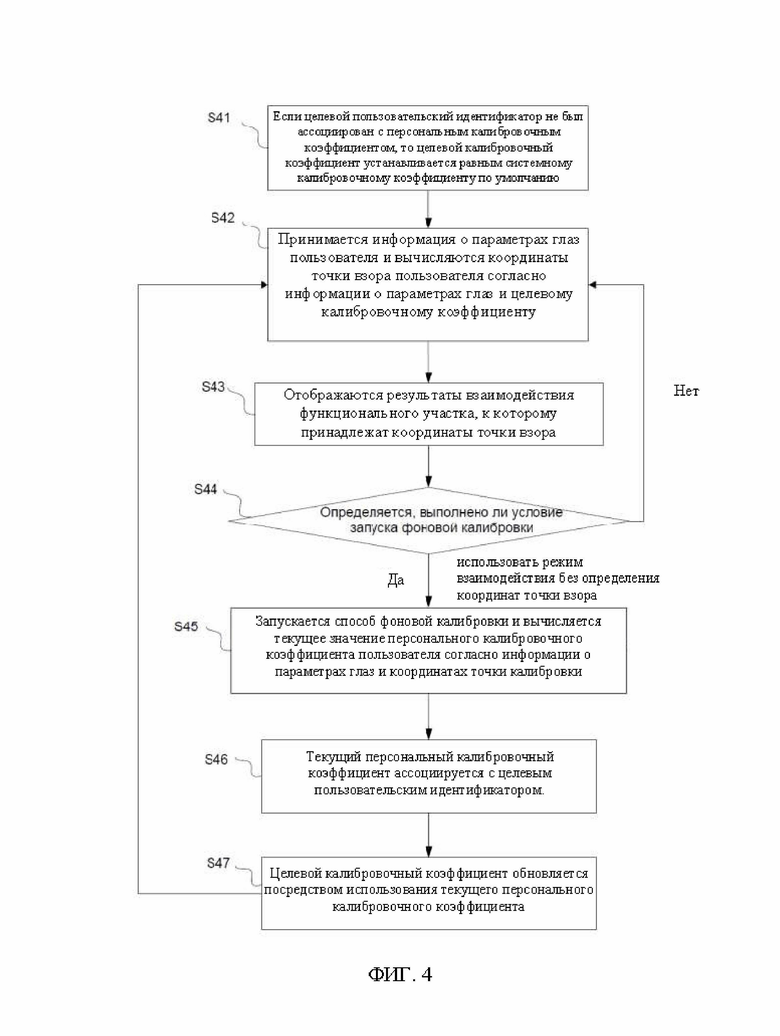
В третьем варианте осуществления будет описано, как выполнить калибровку для окулографии, если целевой пользовательский индентификатор сначала не был ассоциирован с персональным калибровочным коэффициентом. Как показано на фиг.4, приводимый в качестве примера (иллюстративный) способ предусматривает следующие стадии.
На стадии S41, если целевой пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным системному калибровочному коэффициенту по умолчанию.
Стадии с S42 по S45 подобны вышеупомянутым стадиям с S31 по S34, и поэтому их описание не будет повторяться здесь.
На стадии S46 текущий персональный калибровочный коэффициент ассоциируется с целевым пользовательским идентификатором.
На стадии S47 целевой калибровочный коэффициент обновляется посредством использования текущего персонального калибровочного коэффициента, и выполняется возврат на стадию S41.
После использования для определения координат устройства взаимодействия без определения координат точки взора будет снова использоваться режим взаимодействия с определением координат точки взора.
С помощью данного варианта осуществления, если пользователь не ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным калибровочному коэффициенту по умолчанию, и подсвечивается функциональный участок, к которому принадлежат координаты точки взора. Если выделенный подсветкой функциональный участок не является ожидаемым функциональным участком для пользователя, пользователь выполнит повторное определение координат посредством использования устройства взаимодействия без определения координат точки взора, например, рукоятки, и одновременно выполняется запуск способа фоновой калибровки.
Полученный с помощью фоновой калибровки персональный калибровочный коэффициент будет ассоциирован с целевым пользовательским идентификатором, и персональный калибровочный коэффициент будет использоваться в следующей операции взаимодействия, так что при последующем выполнении определения координат в режиме взаимодействия с определением координат точки взора ранее вычисленный персональный калибровочный коэффициент можно будет использовать для вычисления координат точки взора. Таким образом, можно реализовать переход от использования калибровочного коэффициента по умолчанию к использованию более точного персонального калибровочного коэффициента, и при этом также возможно дополнительно предоставить пользователю более персонализированные и точные услуги определения координат точки взора.
Четвертый вариант осуществления
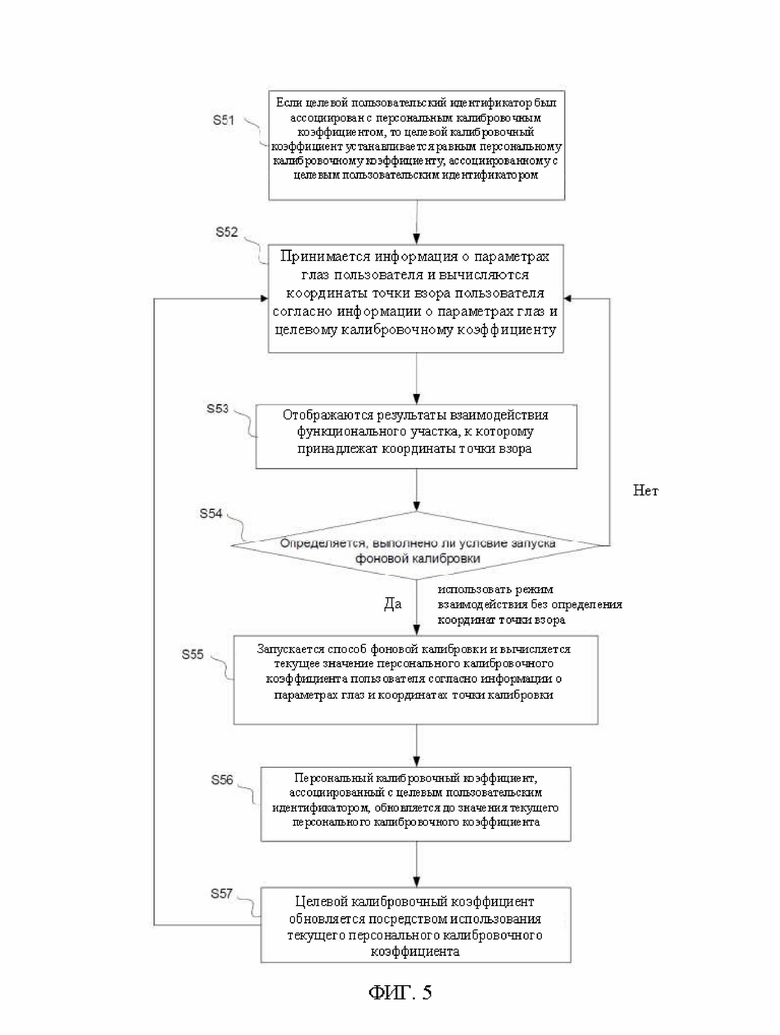
В четвертом варианте осуществления будет специально описан способ калибровки для окулографии в случае, когда целевой пользовательский индентификатор сначала был ассоциирован с персональным калибровочным коэффициентом. Как показано на фиг. 5, приводимый в качестве примера (иллюстративный) способ предусматривает следующие стадии.
На стадии S51, если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором.
Стадии с S52 по S55 подобны вышеупомянутым стадиям с S31 по S34, и поэтому их описание не будет повторяться здесь.
На стадии S56 персональный калибровочный коэффициент, ассоциированный с целевым пользовательским идентификатором, обновляется до значения текущего персонального калибровочного коэффициента.
На стадии S57 целевой калибровочный коэффициент обновляется посредством использования текущего персонального калибровочного коэффициента, и выполняется возврат на стадию S51.
После использования для определения координат устройства взаимодействия без определения координат точки взора будет снова использоваться режим взаимодействия с определением координат точки взора.
С помощью данного варианта осуществления, если пользователь был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с пользователем, так что можно предоставить пользователю более персонализированные и точные услуги определения координат точки взора.
Кроме того, если был запущен способ фоновой калибровки, то текущий персональный калибровочный коэффициент ассоциируется с целевым пользовательским идентификатором, и текущий персональный калибровочный коэффициент используется в последующей операции взаимодействия, так что текущий персональный калибровочный коэффициент можно обновлять адаптивно, и пользователю можно дополнительно предоставить более персонализированные и точные услуги определения координат точки взора.
Пятый вариант осуществления
Пользователь, использующий устройство отслеживателя положения глаз, может быть тем же самым лицом по умолчанию. Или, с учетом того, что многие люди могут использовать то же самое устройство, различные пользователи могут также быть отличены друг от друга с помощью таких технологий, как биометрия.
Согласно конкретному варианту осуществления пользовательский идентификатор может быть связан с биометрическими параметрами, при этом различные биометрические параметры соответствует различным пользовательским идентификатором, и различные пользовательские идентификаторы представляют различных пользователей, так что различных пользователей можно отличить друг от друга.
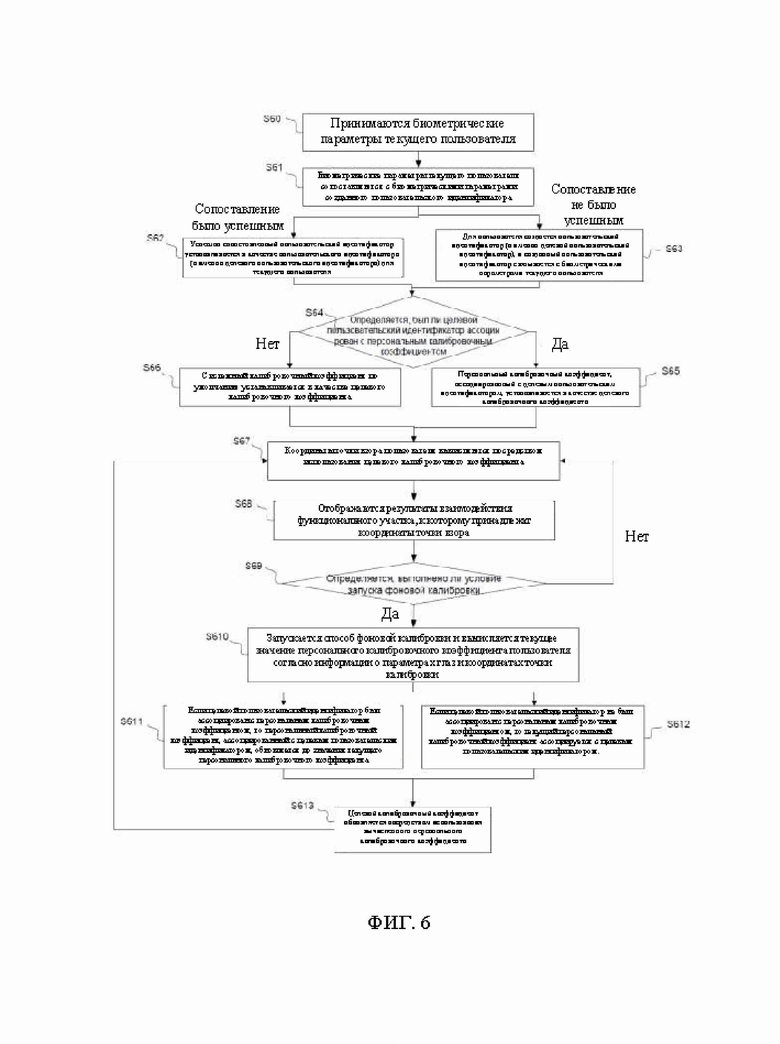
Как показано на фиг. 6, способ калибровки при окулографии на основе биометрических параметров в качестве примера предусматривает следующие стадии.
На стадии S60 принимаются биометрические параметры текущего пользователя.
Здесь биометрические параметры, в качестве примера, могут включать в себя, по меньшее мере, один из следующих параметров: радужная оболочка глаза, отпечаток пальца, голосовой отпечаток и даже черты лица.
На стадии S61 биометрические параметры текущего пользователя сопоставляются с биометрическими параметрами созданного пользовательского идентификатора.
На стадии S62, если сопоставление прошло успешно, успешно сопоставленный пользовательский идентификатор устанавливается в качестве пользовательского идентификатора (а именно целевого пользовательского идентификатора) для текущего пользователя.
Например, если успешно сопоставленный пользовательский идентификатор равен 000010, то «000010» устанавливается в качестве пользовательского идентификатора для текущего пользователя.
На стадии S63, если сопоставление не прошло успешно, для пользователя создается пользовательский идентификатор (а именно целевой пользовательский идентификатор), и созданный пользовательский идентификатор связывается с биометрическими параметрами текущего пользователя.
Успешно сопоставленный пользовательский идентификатор из стадии S62, или созданный на стадии S63 пользовательский идентификатор является целевым пользовательским идентификатором в вышеупомянутом варианте осуществления.
На стадии S64 определяется, был ли целевой пользовательский идентификатор ассоциирован с персональным калибровочным коэффициентом, и если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то выполняется переход на стадию S65, а если целевой пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то выполняется переход на стадию S66.
На стадии S65 персональный калибровочный коэффициент, ассоциированный с целевым пользовательским идентификатором, устанавливается в качестве целевого калибровочного коэффициента.
На стадии S66 системный калибровочный коэффициент по умолчанию устанавливается в качестве целевого калибровочного коэффициента.
На стадии S67 вычисляются координаты точки взора пользователя посредством использования целевого калибровочного коэффициента.
Конкретно, сначала принимается информация о параметрах глаз пользователя и вычисляются координаты точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту.
Для конкретного описания можно посмотреть описание вышеупомянутых стадий в данном документе и поэтому оно не будет повторяться здесь.
Стадии с S68 по S610 подобны вышеупомянутым стадиям с S32 по S34, и поэтому их описание не будет повторяться здесь.
На стадии S611, если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то персональный калибровочный коэффициент, ассоциированный с целевым пользовательским идентификатором, обновляется до значения текущего персонального калибровочного коэффициента.
На стадии S612, если целевой пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то текущий персональный калибровочный коэффициент ассоциируется с целевым пользовательским идентификатором.
На стадии S613 целевой калибровочный коэффициент обновляется посредством использования вычисленного персонального калибровочного коэффициента, и выполняется возврат на стадию S67.
Согласно данному варианту осуществления после извлечения биометрических параметров (например, радужной оболочки глаза) эти биометрические параметры сопоставляются с биометрическими параметрами созданного пользовательского идентификатора, чтобы идентифицировать, является ли пользователь новым пользователем, и если биометрические параметры были сопоставлены с созданным пользовательским идентификатором, то успешно сопоставленный пользовательский идентификатор устанавливается в качестве пользовательского идентификатора для текущего пользователя. В текущей операции взаимодействия координаты точки взора вычисляются посредством использования текущего персонального калибровочного коэффициента успешно сопоставленного пользовательского идентификатора.
Если пользователь является новым пользователем, то для этого нового пользователя создается пользовательский идентификатор, и в первой операции взаимодействия координаты точки взора вычисляются посредством использования системного калибровочного коэффициента по умолчанию.
Пользователи различаются друг от друга посредством использования биометрических параметров, что способствует предоставлению персонализированных и более точных услуг определения координат точки взора для различных пользователей. Может быть предложен следующий сценарий.
Предполагается, что мобильное устройство используется многими членами семьи. Сначала член семьи А выполняет операцию взаимодействия и вычисляет свой персональный калибровочный коэффициент. После этого член семьи Б также используют мобильное устройство, и если член семьи Б не будет отличен от члена семьи А, то вычисленный персональный калибровочный коэффициент члены семьи А непосредственно используется для калибровки, и определение координат может быть неточным. В результате запускается фоновая калибровка и вычисленный персональный калибровочный коэффициент становится принадлежащим члену семьи Б.
Впоследствии, если член семьи А снова использует мобильное устройство, то так как членов семьи нельзя отличить друг от друга, член семьи А будет использовать персональный калибровочный коэффициент члена семьи Б для вычисления координат точки взора, так что также нельзя будет достичь точного определения координат.
Однако если разные пользователи будут отличаться друг от друга по биометрии, это персональные калибровочные коэффициенты разных пользователей больше не будут перемешаны вместе, так что персонализированные услуги определения координат точки взора могут быть предоставлены для разных пользователей.
Шестой вариант осуществления
В данном варианте осуществления предложено устройство для калибровки при окулографии. Как показано на фиг. 7, устройство включает в себя:
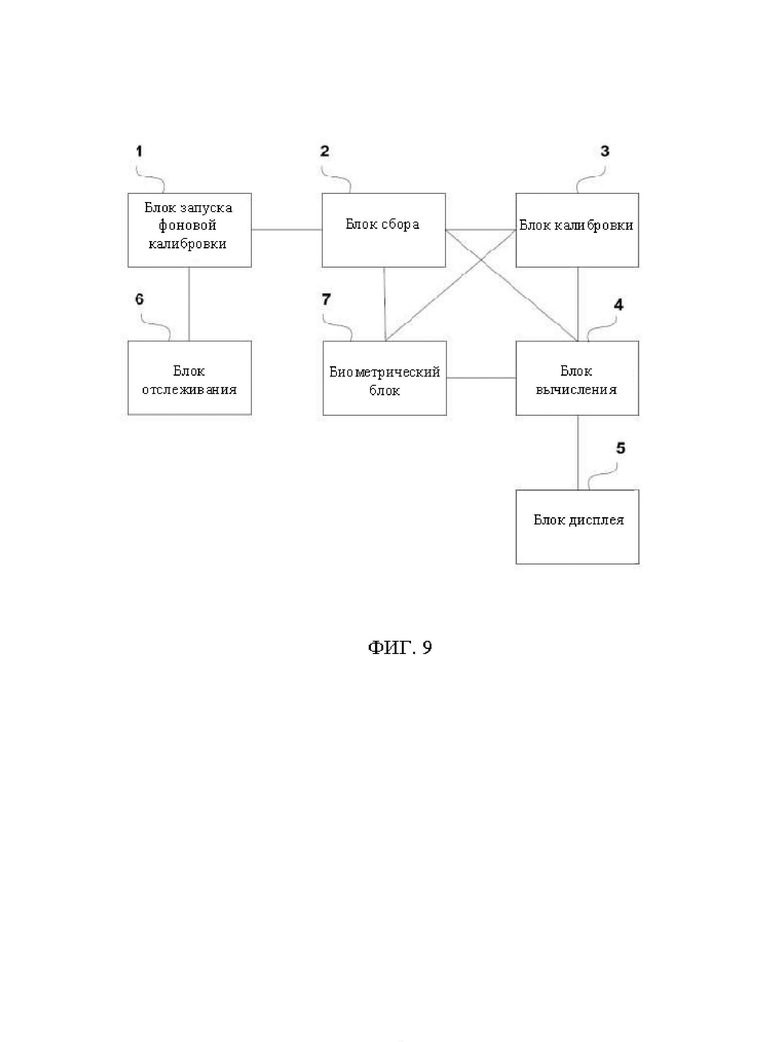
блок 1 запуска фоновой калибровки, выполненный с возможностью осуществления запуска в блоке 3 калибровки способа фоновой калибровки в операции взаимодействия, если пользователем был выбран режим взаимодействия, который является режимом взаимодействия без определения координат точки взора;
блок 2 сбора, выполненный с возможностью получить информацию о параметрах глаз пользователя при выполнении способа фоновой калибровки; и
блок 3 калибровки, выполненный с возможностью получить координаты места в способе фоновой калибровки и установить координаты точки калибровки равными координатам места, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора; и проводить вычисление текущего персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки.
Предложенное согласно варианту осуществления настоящего изобретения устройство для калибровки при окулографии может быть реализовано в виде терминального устройства, осуществляющего определение координат точки взора (называемое отслеживателем положения глаз), например, как система BP, устройство ДР и планшетный компьютер для окулографии, чтобы выполнить способ калибровки для окулографии.
Для конкретного описания и выгодных результатов можно посмотреть предыдущие описания, и поэтому это не будет повторяться здесь.
Согласно другим вариантам осуществления, показанным на фиг. 8, устройство для калибровки при окулографии во всех вышеупомянутых вариантах осуществления может также включать в себя:
блок 4 калибровки, выполненный с возможностью перед запуском способа фоновой калибровки получить информации о параметрах глаз пользователя, и вычислить координаты точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту, причем целевой калибровочный коэффициент включает в себя системный калибровочный коэффициент по умолчанию, или персональный калибровочный коэффициент, ассоциированный с пользовательским идентификатором пользователя.
блок 5 дисплея, выполненный с возможностью показывать результаты взаимодействия с функциональным участком, к которому принадлежат координаты точки взора; и
блок 6 отслеживания, выполненный с возможностью установить, что режим взаимодействия, использованный в настоящей операции взаимодействия, является режимом взаимодействия без определения координат точки взора, если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и определение координат других функциональных участков проводится устройством взаимодействия без определения координат точки взора.
Для конкретного описания и выгодных результатов можно посмотреть предыдущие описания, и поэтому это не будет повторяться здесь.
Вышеупомянутый пользовательский идентификатор пользователя можно назвать целевым пользовательским идентификатором.
Согласно другим вариантам осуществления настоящего изобретения, после вычисления текущего персонального калибровочного коэффициента, согласно всем вышеупомянутым вариантам изобретения, блок 3 калибровки дополнительно выполнен с возможностью: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, провести обновление персонального калибровочного коэффициента, ассоциированного с целевым пользовательским идентификатором, до текущего персонального калибровочного коэффициента; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, провести ассоциирование текущего персонального калибровочного коэффициента с целевым пользовательским идентификатором.
Для конкретного описания и выгодных результатов можно посмотреть предыдущие описания, и поэтому это не будет повторяться здесь.
Согласно другим вариантам осуществления настоящего изобретения, после вычисления текущего персонального калибровочного коэффициента, согласно всем вышеупомянутым вариантам изобретения, блок 4 вычисления может быть дополнительно выполнен с возможностью: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным системному калибровочному коэффициенту по умолчанию.
Для конкретного описания и выгодных результатов можно посмотреть предыдущие описания, и поэтому это не будет повторяться здесь.
Пользовательский идентификатор может быть связан с биометрическими параметрами. Согласно другим вариантам осуществления настоящего изобретения, показанным на фиг. 9, устройство дополнительно включает в себя:
биометрический блок 7, выполненный с возможностью провести получение биометрических параметров пользователя перед вычислением координат точки взора пользователя с помощью использования целевого калибровочного коэффициента; провести сопоставление биометрических параметров пользователя с биометрическими параметрами созданного пользовательского идентификатора; если сопоставление было успешным, установить успешно сопоставленный пользовательский идентификатор в качестве пользовательского идентификатора пользователя; а если сопоставление не было успешным, создать пользовательский идентификатор для пользователя, и связать созданный пользовательский идентификатор с биометрическими параметрами пользователя.
Для конкретного описания и выгодных результатов можно посмотреть предыдущие описания, и поэтому это не будет повторяться здесь.
Седьмой вариант осуществления
Согласно одному варианту осуществления настоящего изобретения предложен носитель данных, причем, по меньшей мере, одна выполняемая компьютером программа хранится на носителе данных, и когда она загружена и выполняется процессором, по меньшей мере, одна выполняемая компьютером программа выполнена с возможностью реализовать стадии вышеупомянутого способа калибровки для окулографии согласно, по меньшей мере, одному варианту осуществления из вариантов осуществления с первого по шестой.
Восьмой вариант осуществления
Согласно одному варианту осуществления настоящего изобретения предложен процессор, выполненный с возможностью выполнения программы, причем выполняемая программа выполнена с возможностью реализовать стадии вышеупомянутого способа калибровки для окулографии согласно любому из вариантов осуществления с первого по шестой.
Девятый вариант осуществления
Согласно одному варианту осуществления настоящего изобретения предложено устройство калибровки для окулографии. Устройство калибровки для окулографии включает в себя: процессор, память, и программу, которая хранится в памяти и выполняется в процессоре, причем выполняющий программу процессор выполнен с возможностью реализовать стадии способа калибровки для окулографии согласно способу калибровки, описанному в любом из вышеупомянутых вариантов осуществления с первого по шестой.
Специалисты в этой области техники должны понимать, что варианты осуществления настоящего изобретения могут быть предложены в виде способа, системы или компьютерной программы. Соответственно, настоящее изобретение может принять форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления, или варианта осуществления с объединением программного обеспечения с аппаратурой. Более того, настоящее изобретение может принять форму компьютерной программы, которая хранится, по меньшей мере, на одном носителе данных для компьютера (включая помимо прочего, память на магнитном диске, CD-ROM и оптическую память и тому подобное) и содержит выполняемый компьютером код программы.
Настоящее изобретение описано в вариантах осуществления настоящего изобретения с помощью блок-схемы алгоритма и/или блок-схемы способа, устройства (системы) и компьютерной программы. Следует понимать, что инструкции компьютерной программы реализуют каждую ветвь и/или блок в блок-схеме алгоритма и в комбинации ветвей и/или блоков в схеме алгоритма и/или в блок-схеме. Такие инструкции компьютерной программы могут быть предложены для компьютера общего назначения, компьютера специального назначения, встроенного процессора или процессоров других программируемых устройств для обработки данных для создания машины, так что инструкции, выполняемые компьютерами или процессорами или другими программируемыми устройствами обработки данных, создают устройства, которые используются для реализации конкретных функций в, по меньшей мере, одной ветви на схеме алгоритма и/или одного блока на блок-схеме.
Такие инструкции компьютерной программы могут также храниться в машиночитаемой памяти, которая способна заставить компьютеры или другие программируемые устройства обработки данных работать особым образом, так что хранящиеся в машиночитаемой памяти инструкции создают результаты, включая программные устройства, и программные устройства реализуют конкретные функции, по меньшей мере, в одной ветви алгоритма и/или, по меньшей мере, в одном блоке блок-схемы.
Такие инструкции компьютерной программы могут также быть загружены в компьютеры или другие программируемые устройства обработки данных так, чтобы выполнять на компьютерах или других программируемых устройствах обработки данных последовательность стадий операций для выполнения обработки, которая реализуется компьютерами, так что выполненные в компьютерах или других программируемых устройствах обработки данных инструкции обеспечивают стадии для реализации конкретных функции, по меньшей мере, в одной ветви алгоритма и/или, по меньшей мере, в одном блоке блок-схемы.
В типичной конфигурации вычислительное устройство содержит, по меньшей мере, один центральный процессор (ЦП), интерфейс ввода/вывода, сетевой интерфейс и память.
Память может включать в себя энергозависимую память, оперативное запоминающее устройство (ОЗУ) и/или энергонезависимую память и другие виды машиночитаемых носителей данных, например, постоянное запоминающее устройство (ПЗУ) или флеш-память (флеш ЗУ). Память является примером машиночитаемого носителя данных.
Машиночитаемый носитель данных включает в себя неэнергозависимый и энергозависимый, а также съемный и несъемный носитель данных, который может выполнять хранение информации с помощью любого способа или технологии. Информация может быть машиночитаемым инструкциями, структурами данных, модулями программы или другими данными. Примеры носителя данных включают в себя, помимо прочего, запоминающее устройство с фазовым переходом (PRAM), статическое оперативное запоминающее устройство (СОЗУ), динамическое оперативное запоминающее устройство (ДОЗУ), другие типы оперативных запоминающих устройств (ОЗУ), постоянное запоминающее устройство (ПЗУ), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), флеш-память или другие технологии памяти, постоянное запоминающее устройство на компакт-диске (CD-ROM), цифровой многоцелевой диск (DVD) или другую оптическую дисковую память, магнитную кассету, магнитную ленту, память на магнитном диске или другие устройство магнитной памяти, или любые другие энергонезависимые носители данных, используемые для хранения нужной информации, которая может быть доступной для вычислительного устройства. Согласно определению этого параграфа машиночитаемые носитель не включает в себя в передаваемую в среде информацию, например модулированные сигналы данных и волны несущей частоты.
Следует также отметить, что термины «включает в себя», «содержит» и любые другие их варианты предназначены для описания неэксклюзивных включений, так что способ, изделие или устройство, включающее в себя ряд элементов, может не только включать в себя эти элементы, но также включать в себя другие элементы, которые не указаны явно, или также включать в себя элементы, неотъемлемые для такого способа, изделия или устройства. Если больше нет никаких ограничений, определенный фразой «включая в себя…» элемент не исключает существования других идентичных элементов в способе, изделии или устройстве, которое включает в себя этот элемент.
Специалисты в этой области техники должны понимать, что варианты осуществления настоящего изобретения могут быть предложены в виде способа, системы или компьютерной программы. Соответственно, настоящее изобретение может принять форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления, или варианта осуществления с объединением программного обеспечения с аппаратурой. Более того, настоящее изобретение может принять форму компьютерной программы, которая хранится, по меньшей мере, на одном носителе данных для компьютера (включая помимо прочего, память на магнитном диске, CD-ROM и оптическую память и тому подобное) и содержит выполняемый компьютером код программы.
Вышеупомянутые описания являются приведенными в качестве примера (иллюстративными) вариантами осуществления настоящего изобретения, и они не предназначены для ограничения настоящего изобретения. Специалисты в этой области техники понимают, что у настоящего изобретения могут быть многие модификации и изменения. Любые модификации, эквивалентные замены, и тому подобное, выполненные в пределах сущности и принципов настоящего изобретения, должны быть включены в объем формулы настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЗИЦИЕЙ КОНТРОЛЬНОЙ ТОЧКИ В КОМАНДНОЙ ОБЛАСТИ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ | 2006 |
|
RU2421776C2 |
| СЛЕЖЕНИЕ ЗА ВЗГЛЯДОМ НА ОСНОВЕ АДАПТИВНОГО ГОМОГРАФИЧЕСКОГО СОПОСТАВЛЕНИЯ | 2015 |
|
RU2685020C2 |
| Способы и системы аутентификации | 2016 |
|
RU2724310C2 |
| Способ и система аутентификации | 2016 |
|
RU2719460C2 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ ПО ТРАЕКТОРИИ ДВИЖЕНИЯ КУРСОРА | 2019 |
|
RU2792586C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА АУТЕНТИФИКАЦИИ НА ОСНОВЕ БИОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК | 2013 |
|
RU2589344C2 |
| АТРИБУЦИЯ ДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ НА ОСНОВЕ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ | 2014 |
|
RU2668984C2 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ДЛЯ БИОМЕТРИЧЕСКОГО РАСПОЗНАВАНИЯ РАДУЖНОЙ ОБОЛОЧКИ ГЛАЗА | 2016 |
|
RU2630742C1 |
| Система и способ аутентификации пользователя при помощи электронной цифровой подписи пользователя | 2015 |
|
RU2610696C2 |
| Способ оценки произвольного внимания на основе глазодвигательных показателей и амплитудно-частотных характеристик электроэнцефалограммы | 2019 |
|
RU2722447C1 |

Изобретение относится к способу и устройству для калибровки при окулографии. Техническим результатом является повышение точности фоновой калибровки при окулографии, скрытой от пользователя, без необходимости выходить из текущего сценария для выполнения калибровки. Способ предусматривает стадии: запускается функция окулографии; если пользователь выбрал режим взаимодействия, который является режимом взаимодействия без определения координат точки взора, то выполняется запуск способа фоновой калибровки; при выполнении способа фоновой калибровки принимается информация о параметрах глаз пользователя; выполняется получение координат места и координаты точки калибровки устанавливаются равными координатам места, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора; и проводится вычисление текущего персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки. 2 н. и 6 з.п. ф-лы, 10 ил.
1. Способ калибровки при окулографии, который предусматривает стадии:
если в операции взаимодействия пользователь выбрал режим взаимодействия, который является режимом взаимодействия без определения координат точки взора, то выполняется запуск способа фоновой калибровки;
получение информации о параметрах глаз пользователя при выполнении способа фоновой калибровки;
получение координат места и настройка координат места в качестве координат точки калибровки, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора; и
вычисление текущего значения персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки с использованием алгоритма оценки линии взора,
при этом пользовательский идентификатор пользователя является целевым пользовательским идентификатором;
после вычисления текущего персонального калибровочного коэффициента способ дополнительно предусматривает следующие стадии:
если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то персональный калибровочный коэффициент, ассоциированный с целевым пользовательским идентификатором, обновляется до значения текущего персонального калибровочного коэффициента, и
если пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то текущий персональный калибровочный коэффициент ассоциируется с целевым пользовательским идентификатором;
вычисление координат точки взора в соответствии с персональным калибровочным коэффициентом для услуг определения координат.
2. Способ по п. 1, в котором перед запуском способа фоновой калибровки способ дополнительно предусматривает следующие стадии:
получение информации о параметрах глаз пользователя;
вычисление координат точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту, причем целевой калибровочный коэффициент включает в себя системный калибровочный коэффициент по умолчанию, или персональный калибровочный коэффициент, ассоциированный с пользовательским идентификатором пользователя;
отображение результатов взаимодействия с функциональным участком, к которому принадлежат координаты точки взора; и
если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и определение координат других функциональных участков проводится устройством взаимодействия без определения координат точки взора, то устанавливается, что режим взаимодействия, использованный в настоящей операции взаимодействия, является режимом взаимодействия без определения координат точки взора.
3. Способ по п. 2, в котором перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента способ дополнительно предусматривает следующие стадии:
если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; и
если пользовательский идентификатор не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному системному калибровочному коэффициенту по умолчанию.
4. Способ по любому из пп. 2, 3, в котором пользовательский идентификатор связан с биометрическими параметрами; перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента способ дополнительно предусматривает следующие стадии:
принимаются биометрические параметры пользователя;
биометрические параметры пользователя сопоставляются с биометрическими параметрами созданного пользовательского идентификатора;
если сопоставление прошло успешно, успешно сопоставленный пользовательский идентификатор устанавливается в качестве пользовательского идентификатора пользователя; и
если сопоставление не прошло успешно, для пользователя создается пользовательский идентификатор, и созданный пользовательский идентификатор связывается с биометрическими параметрами пользователя.
5. Устройство для калибровки при окулографии, содержащее:
блок запуска фоновой калибровки, выполненный с возможностью осуществления запуска способа фоновой калибровки в операции взаимодействия, если пользователем был выбран режим взаимодействия, который является режимом взаимодействия без определения координат точки взора;
блок сбора, выполненный с возможностью получения информации о параметрах глаз пользователя в способе фоновой калибровки; и
блок калибровки, выполненный с возможностью получения координат места и настройки координат места в качестве координат точки калибровки, при этом координаты места получаются при выполнении определения координат в режиме взаимодействия без определения координат точки взора, и вычисления текущего персонального калибровочного коэффициента пользователя согласно информации о параметрах глаз и координатах точки калибровки с использованием алгоритма оценки линии взора,
при этом пользовательский идентификатор пользователя является целевым пользовательским идентификатором;
после вычисления текущего персонального калибровочного коэффициента блок калибровки дополнительно выполнен с возможностью: если целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, провести обновление персонального калибровочного коэффициента, ассоциированного с целевым пользовательским идентификатором, до текущего персонального калибровочного коэффициента; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, провести ассоциирование текущего персонального калибровочного коэффициента с целевым пользовательским идентификатором; и
устройство для калибровки выполнено с возможностью вычисления координат точки взора в соответствии с персональным калибровочным коэффициентом для услуг определения координат.
6. Устройство по п. 5, дополнительно содержащее:
блок вычисления, выполненный с возможностью перед запуском способа фоновой калибровки получения информации о параметрах глаз пользователя, и вычисления координат точки взора пользователя согласно информации о параметрах глаз и целевому калибровочному коэффициенту, причем целевой калибровочный коэффициент включает в себя системный калибровочный коэффициент по умолчанию или персональный калибровочный коэффициент, ассоциированный с пользовательским идентификатором пользователя;
блок дисплея, выполненный с возможностью отображения результатов взаимодействия с функциональным участком, к которому принадлежат координаты точки взора; и
блок отслеживания, выполненный с возможностью определения, что режим взаимодействия, использованный в настоящей операции взаимодействия, является режимом взаимодействия без определения координат точки взора, если было отслежено, что используется устройство взаимодействия без определения координат точки взора, и определение координат других функциональных участков проводится устройством взаимодействия без определения координат точки взора.
7. Устройство по п. 6, в котором блок вычисления дополнительно выполнен с возможностью: если перед вычислением координат точки взора пользователя посредством использования целевого калибровочного коэффициента целевой пользовательский идентификатор был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным персональному калибровочному коэффициенту, ассоциированному с целевым пользовательским идентификатором; а если пользовательский идентификатор пользователя не был ассоциирован с персональным калибровочным коэффициентом, то целевой калибровочный коэффициент устанавливается равным системному калибровочному коэффициенту по умолчанию.
8. Устройство по любому из пп. 6, 7, в котором пользовательский идентификатор связан с биометрическими параметрами; устройство дополнительно включает в себя: биометрический блок, выполненный с возможностью перед вычислением координат точки взора пользователя с помощью использования целевого калибровочного коэффициента провести получение биометрических параметров пользователя; провести сопоставление биометрических параметров пользователя с биометрическими параметрами созданного пользовательского идентификатора; если сопоставление было успешным, установить успешно сопоставленный пользовательский идентификатор в качестве пользовательского идентификатора пользователя; а если сопоставление не было успешным, создать пользовательский идентификатор для пользователя и связать созданный пользовательский идентификатор с биометрическими параметрами пользователя.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| CN 109976535 A, 05.07.2019 | |||
| CN 105843397 A, 10.08.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЛИНИИ ВЗГЛЯДА | 2013 |
|
RU2541192C1 |
| 0 |
|
SU153304A1 | |
