Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для картирования сельскохозяйственных угодий и мониторинга урожайности при уборке зерновых культур зерноуборочными комбайнами.
Система картирования урожайности - аппаратно-программный комплекс, устанавливаемый на уборочную технику, позволяющий определять и фиксировать количество собранной сельскохозяйственной продукции за промежутки времени в 2-4 секунды. В результате использования данных систем создаются карты урожайности, позволяющие выявить неоднородность уровня урожайности в пределах одного поля.
Известны передовые образцы сельскохозяйственной уборочной техники фирм Topcon и New Holland (США, Голландия). Они оснащены тензометрическими датчиками урожайности, позволяющими с достаточной точностью измерять объем собранного зерна в единицу времени.
Основными недостатками, препятствующими массовому использованию этих систем картирования урожайности, является их стоимость, составляющая от $9500 до $12000 на один комбайн и недоступность их приобретения в настоящее время.
Более дешевые системы картирования оснащаются оптическим датчиком, устанавливаемым на зерновой элеватор комбайна. Такой датчик определяет лишь условный объем зерна, прошедший по зерновому элеватору комбайна в единицу времени. Дело в том, что оптический датчик реагирует на пересечение собственного луча массой зерна, поднимаемого лопаткой зернового элеватора. На точность измерения объема влияют следующие факторы:
• отличия установок оптических датчиков урожайности на разных моделях комбайнов;
• различные размеры лопаток зернового элеватора на разных моделях комбайнов;
• разная степень износа лопаток зернового элеватора на одинаковых моделях комбайнов;
• изменение конуса осыпаемости зерновой массы, находящейся на лопатках зернового элеватора в зависимости от влажности и натуры зерна.
Вышеуказанные факторы обуславливают различие в урожайности на разных комбайнах до 30%, что не позволяет создавать карты урожайности. Для обеспечения приемлемой точности проводятся калибровки датчиков урожайности. Для этого собранный урожай из бункера комбайна выгружается в грузовой автомобиль, отвозится на весовую станцию и там взвешивается. После чего результат взвешивания вводится вручную в вычислительное устройство на комбайне. Такая операция должна проводиться с каждым комбайном при переходе на новую культуру, а также при существенном изменении влажности зерна (после дождя или при наличии росы), что, в реальности, не выполнимо. Выше перечисленные недостатки не позволяют подобным системам, не смотря на относительную дешевизну, получить широкое распространение.
По состоянию на 2023 год в России системами картирования урожайности было оснащено не более 5% комбайнов.
Известно устройство для определения массы зерна в бункере зерноуборочного комбайна (см. патент РФ 2670945, МПК A01F 12/60, опубл. 25.10.2018). Устройство содержит тензодатчик, приспособление для определения плотности зерна, выполненное в виде заборника, снабженного приводом перемещения. Привод перемещения выполнен в виде электролебедки, на тросе которой размещен тензодатчик. Кроме того, на раме зернового бункера размещены датчики уровня его заполнения.
Недостатком данного устройства является то, что устройство позволяет измерять только общую массу зерна в наполненном бункере, что не обеспечивает возможности точного картирования урожайности на различных участках поля.
Известна также система автоматического документирования ситуаций во время проведения полевых работ (патент RU 2605775, МПК A01D 41/00, опубл. 27.04.2014 Бюл. No 12), включающая по меньшей мере один датчик рабочих параметров сельскохозяйственной машины и/или по меньшей мере один датчик урожайности для регистрации параметров собираемого урожая, и вычислительное устройство, соединенное с датчиком рабочих параметров и/или с датчиком урожайности.
Недостатком данной системы автоматического документирования ситуаций во время проведения полевых работ является низкая эксплуатационная точность системы и связанная с этим необходимость проведения периодических контрольных замеров в процессе эксплуатации для своевременного принятия решения о целесообразности перекалибровки датчика урожайности и необходимости проведения технического обслуживания системы.
Наиболее близким к заявляемому является система картирования урожайности (патент RU 2787726, МПК A01D 41/00, опубл. 12.01.2023 Бюл. №2.
Недостатками данной системы картирования урожайности являются:
- наличие в системе датчика рабочих параметров сельскохозяйственной машины, излишне усложняющего ее и не являющегося необходимым для функционирования системы картирования урожайности;
- невысокая точность вычисления текущей урожайности и отсутствие привязки значений урожайности к географическим координатам различных участков убираемого поля, вследствие чего точное картирование урожайности невозможно;
- отсутствие автоматической калибровки данных от датчика урожайности и, как следствие, необходимость привлечения оператора для проведения технического обслуживания системы при ее выходе из допустимых параметров заданной точности;
- отсутствие возможности корректировки значений урожайности при частичном или полном наезде комбайна на уже убранный участок;
- отсутствие привязки к географическим координатам выгрузок зерновой массы из бункера комбайна.
Техническим результатом данного изобретения является устранение указанных недостатков, а именно: упрощение системы, привязка значений урожайности и выгрузок зерновой массы из бункера комбайна к географическим координатам, повышение точности вычисления текущей урожайности и исключение человеческого фактора за счет автоматической калибровки системы, корректировка значений урожайности при частичном или полном наезде комбайна на уже убранный участок.
Указанный технический результат достигается тем, что система картирования урожайности включает в себя, по меньшей мере, один датчик урожайности для регистрации параметров урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной во время полевых работ, вычислительное устройство, соединенное с одним, по меньшей мере, датчиком урожайности, спутниковым приемником географических координат, датчиком минимального уровня зерна в бункере комбайна, установленным в нижней точке бункера, датчиком максимального уровня зерна в бункере комбайна, установленным в верхней точке бункера, при этом вычислительное устройство снабжено программой, позволяющей осуществлять калибровку данных от датчика урожайности в автоматическом режиме, определять по показаниям датчика урожайности зерна количество урожая зерна, находящегося в бункере и количество урожая зерна, собранного с соответствующего участка поля, а также фиксировать выгрузки зерновой массы из бункера комбайна с привязкой к географическим координатам.
При этом программа, которой снабжено вычислительное устройство, позволяет начинать определение и подсчет количества собранного урожая после превышения установленного минимального значения сигнала от датчика урожайности зерна и игнорировать сигналы, передаваемые в вычислительное устройство от датчика урожайности зерна, если уровень этих сигналов ниже установленного минимального значения.
Технический результат изобретения достигается также тем, что вычислительное устройство снабжено программой, позволяющей корректировать по географическим координатам значения урожайности при частичном или полном наезде комбайна на уже убранный участок.
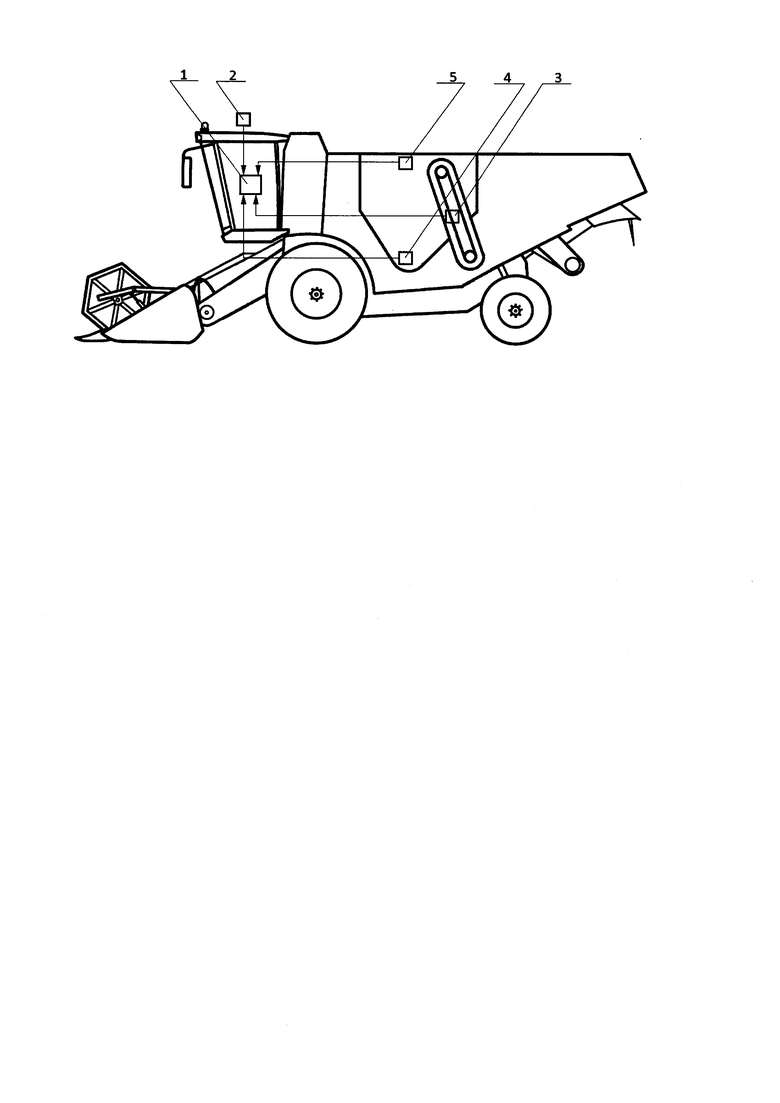
Сущность технического решения поясняется схемой, на которой изображены структурные элементы сельскохозяйственной машины: вычислительное устройство 1 и связанные с ним спутниковый приемник географических координат 2, датчик урожайности 3, датчик минимального уровня зерна в бункере 4, датчик максимального уровня зерна в бункере 5. Датчик минимального уровня зерна в бункере 4 устанавливается в крайней нижней точке бункера комбайна. Датчик максимального уровня зерна в бункере 5 устанавливается в крайней верхней точке бункера комбайна. При установке датчика 5 измеряется объем бункера от его низа до уровня установки датчика максимального уровня зерна в бункере 5, полученный калибровочный объем вводится в вычислительное устройство 1.
Работа системы картирования урожайности осуществляется следующим образом.
При работе системы вычислительное устройство 1 получает сигналы от датчика урожайности 3, датчика минимального уровня зерна в бункере 4, датчика максимального уровня зерна в бункере 5. Вычислительное устройство 1 получает также географические координаты от спутникового приемника географических координат 2, что позволяет создавать карты урожайности путем привязки текущей урожайности к этим координатам. Кроме того, на основе географических координат, получаемых от спутникового приемника географических координат 2, вычислительное устройство 1 строит и запоминает треки перемещений комбайна, и, при обнаружении наложений треков друг на друга при частичном или полном наезде комбайна на уже убранный участок поля, корректирует значение урожайности пропорционально площади наложения. Когда значение сигнала, передаваемое в вычислительное устройство 1 от датчика урожайности 3, превысит установленное минимальное значение, это будет означать, что сельскохозяйственная машина собирает урожай, и с этого момента вычислительное устройство 1 будет определять и подсчитывать количество собранного урожая. Сигналы, передаваемые в вычислительное устройство 1 от датчика урожайности 3 ниже установленного минимального значения, вычислительное устройство 1 игнорирует. Изначально бункер комбайна пуст, о чем будет сигнализировать датчик минимального уровня зерна в бункере 4. По мере сбора урожая бункер комбайна заполняется зерновой массой, вычислительное устройство 1 суммирует и сохраняет получаемые данные от датчика урожайности 3 с привязкой к географическим координатам, получаемым от спутникового приемника географических координат 2. В какой-то момент времени бункер комбайна заполнится зерновой массой до места установки датчика максимального уровня зерна в бункере 5, который, в свою очередь, передаст сигнал об этом событии в вычислительное устройство 1. В этот момент вычислительное устройство 1 сравнит суммарный объем по данным от датчика урожайности 3 с калибровочным объемом, измеренным при установке датчика максимального уровня зерна в бункере 5 и введенным в вычислительное устройство 1, вычислит поправочный коэффициент и скорректирует на этот коэффициент все накопленные к этому моменту данные от датчика урожайности 3. Далее все данные от датчика урожайности 3 будут корректироваться с учетом поправочного коэффициента. После наполнения бункера комбайна производится выгрузка зерновой массы (урожая). При опустошении бункера комбайна датчик минимального уровня зерна в бункере 4 подаст соответствующий сигнал в вычислительное устройство 1, которое, в свою очередь, фиксирует факт выгрузки бункера и количество собранного при этом урожая с привязкой к географическим координатам, получаемым от спутникового приемника географических координат 2. Далее цикл работы системы повторяется, осуществляя периодическую автоматическую калибровку данных от датчика урожайности 3.
Технико-экономическая эффективность данной системы картирования урожайности состоит в достижении технического результата, состоящего в упрощении системы, существенном повышении точности и подробности картирования за счет привязки значений урожайности к географическим координатам соответствующих участков поля, корректировке значений урожайности при частичном или полном наезде комбайна на уже убранный участок и автоматической калибровки системы. Автоматическая калибровка системы, в свою очередь, позволяет исключить традиционную многократную калибровку датчиков урожайности методом индивидуальной выгрузки с последующим взвешиванием и ручной ввод данных в вычислительное устройство комбайна. Подробное и точное картирование урожайности в конечном итоге способствует решению вопросов внедрения технологии точного земледелия для повышения урожайности сельскохозяйственных культур. Кроме того, фиксация выгрузок бункера с привязкой к географическим координатам позволяет предотвратить факты хищения зерна путем обеспечения контроля за несанкционированной выгрузкой урожая из бункера комбайна.
Пример укрупненного расчета технико-экономической эффективности использования заявляемого изобретения на поле площадью 100 га. изложен ниже.
Для агрохимического обследования поля отбор проб проводится на участках 200×200 м или 4 га. Всего на поле в 100 га будет 25 клеток по 4 га. Стоимость одной пробы, включающей в себя отбор этой пробы и хим. анализ, составляет 4500 рублей. Стоимость работ на поле составит 25×4500=112500 рублей. Участки с минимальной урожайностью, в среднем, составляют 25% от общей площади поля. Таким образом, стоимость агрохимического обследования можно снизить в 4 раза, сэкономив более 84000 рублей, или 840 рублей на 1 га. Если в среднем хозяйство имеет 50 тыс.га, то экономия для такого предприятия будет более 40 млн. рублей.
Норма внесения азотных удобрений составляет от 80 до 150 кг/га. Для расчета возьмем норму внесения в 100 кг/га. При стоимости 1 т. удобрений 22000 рублей, общий расход на поле 100 га составит 10 т или 220 тыс. рублей.
При использовании технологии дифференциального посева, основанного на карте урожайности, достигается экономия до 50%., что в нашем примере составит 110 тыс. рублей на поле в 100 га, или 1100 рублей на 1 га. Хозяйство, обрабатывающее 50 тыс.га, получит экономию более 50 млн. рублей. Все вышеперечисленное относится к прямой выгоде. Но еще есть и косвенная. Так, участки поля, имевшие низкую урожайность, после соответствующих мероприятий, произведут больше урожая.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМА ЗЕРНОВОЙ СМЕСИ В ЗЕРНОУБОРОЧНОЙ ТЕХНИКЕ | 2022 |
|
RU2788316C1 |
| СИСТЕМА КАРТИРОВАНИЯ УРОЖАЙНОСТИ | 2020 |
|
RU2787726C2 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ДОКУМЕНТИРОВАНИЯ СИТУАЦИЙ ПРИ ПОЛЕВЫХ РАБОТАХ | 2012 |
|
RU2605775C2 |
| Способ модернизации техники, осуществляющей сбор и транспортировку зерна | 2022 |
|
RU2786925C1 |
| Устройство контроля режимов работы зерноуборочного комбайна | 1991 |
|
SU1801300A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА КЛЕЙКОВИНЫ В ЗЕРНЕ | 2015 |
|
RU2624196C2 |
| СИСТЕМА СВЯЗИ ДЛЯ МОБИЛЬНЫХ И СТАЦИОНАРНЫХ УСТРОЙСТВ (ВАРИАНТЫ) | 2005 |
|
RU2388150C2 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ ПРИ УБОРКЕ ЗЕРНОВЫХ КУЛЬТУР | 2011 |
|
RU2477597C2 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2643250C2 |
| Способ модернизации зерноуборочной техники и устройство для осуществления способа | 2018 |
|
RU2693600C1 |
Изобретение относится к сельскому хозяйству. Система картирования урожайности содержит по меньшей мере один датчик урожайности (3) для регистрации параметров урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной во время полевых работ, вычислительное устройство (1), соединенное с одним по меньшей мере датчиком урожайности (3), спутниковым приемником географических координат (2), датчиком (4) минимального уровня зерна в бункере комбайна, установленным в нижней точке бункера, датчиком (5) максимального уровня зерна в бункере комбайна, установленным в верхней точке бункера. Вычислительное устройство (1) снабжено программой, позволяющей осуществлять калибровку данных от датчика урожайности (3) в автоматическом режиме, определять по показаниям датчика урожайности (3) зерна количество урожая зерна, находящегося в бункере и количество урожая зерна, собранного с соответствующего участка поля, а также фиксировать выгрузки зерновой массы из бункера комбайна с привязкой к географическим координатам. Обеспечивается упрощение системы, привязка значений урожайности и выгрузок зерновой массы из бункера комбайна к географическим координатам, повышение точности вычисления текущей урожайности и исключение человеческого фактора за счет автоматической калибровки системы, корректировка значений урожайности при частичном или полном наезде комбайна на уже убранный участок. 3 з.п. ф-лы, 1 ил.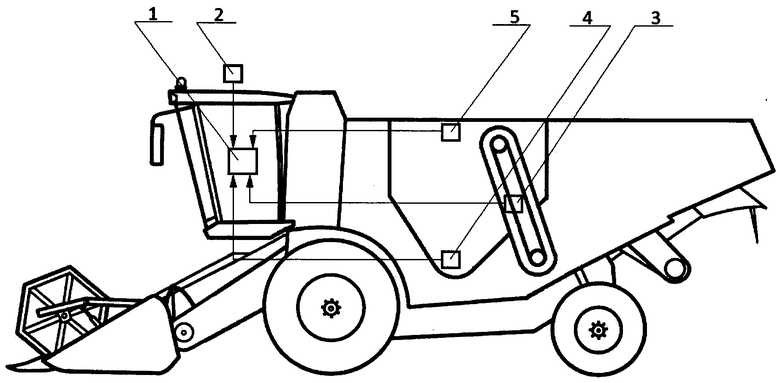
1. Система картирования урожайности, характеризующаяся тем, что содержит по меньшей мере один датчик урожайности для регистрации параметров урожая, собираемого и/или перерабатываемого сельскохозяйственной машиной во время полевых работ, вычислительное устройство, соединенное с одним по меньшей мере датчиком урожайности, спутниковым приемником географических координат, датчиком минимального уровня зерна в бункере комбайна, установленным в нижней точке бункера, датчиком максимального уровня зерна в бункере комбайна, установленным в верхней точке бункера, при этом вычислительное устройство снабжено программой, позволяющей осуществлять калибровку данных от датчика урожайности в автоматическом режиме, определять по показаниям датчика урожайности зерна количество урожая зерна, находящегося в бункере и количество урожая зерна, собранного с соответствующего участка поля, а также фиксировать выгрузки зерновой массы из бункера комбайна с привязкой к географическим координатам.
2. Система картирования урожайности по п. 1, характеризующаяся тем, что вычислительное устройство снабжено программой, позволяющей начинать определение и подсчет количества собранного урожая после превышения установленного минимального значения сигнала от датчика урожайности зерна.
3. Система по п. 1, характеризующаяся тем, что вычислительное устройство снабжено программой, позволяющей игнорировать сигналы, передаваемые в вычислительное устройство от датчика урожайности зерна, если уровень этих сигналов ниже установленного минимального значения.
4. Система картирования урожайности по п. 1, характеризующаяся тем, что вычислительное устройство снабжено программой, позволяющей корректировать по географическим координатам значения урожайности при частичном или полном наезде комбайна на уже убранный участок.
| СИСТЕМА КАРТИРОВАНИЯ УРОЖАЙНОСТИ | 2020 |
|
RU2787726C2 |
| EP 4104666 A1, 21.12.2022 | |||
| US 10178829 B2, 15.01.2019 | |||
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬХОЗМАШИН | 2006 |
|
RU2423038C2 |
| JP 7059124 B2, 25.04.2022. | |||

