Область техники, к которой относится изобретение
Варианты осуществления, обсуждаемые в этом документе, относятся к устройствам для понижения уровня спеклов и рассеивающим элементам и, в частности, к рассеивателям спеклов для использования в системах индикации на лобовом стекле (HUD).
Уровень техники
Оптические (дисплейные) системы, такие как голографические индикаторы на лобовом стекле (HUD), могут использовать лазерные устройства проецирования ("проекторы"). Лазеры являются идеальными источниками света для проекторов благодаря их энергоэффективности, яркости и цветовой гамме. Однако лазерные проекторы могут создавать изображения с ухудшенным качеством по сравнению с другими устройствами отображения, которые излучают свет непосредственно на экран. Это связано с тем, что поверхности, освещенные лазером, часто создают спекл-шум или узор спеклов (в совокупности называемый "спекл"). Спекл – это зернистый рисунок из ярких и темных областей интенсивности, который возникает, когда лазерный свет рассеивается (или отражается) от шероховатой поверхности. Спеклы на проецируемых изображениях могут вызывать напряжение глаз, что, помимо прочего, может привести к головной боли пользователя/наблюдателя. Устройства рассеивания спеклов (также называемые "рассеивателями спеклов" или "рассеивателями") – это устройства, используемые в оптике для разрушения пространственной когерентности (или когерентной интерференции) лазерного света перед отражением от поверхности.
Обычные рассеиватели уменьшают спекл за счет временного усреднения распределения интенсивности с использованием дифракционного элемента, такого как стеклянная линза. Временное усреднение происходит за счет вращения или вибрации дифракционного элемента. Когда рассеиватель перемещается (например, вращается или вибрирует), рассеиватель может усреднять нежелательный эффект спекла, делая время когерентности намного меньше, чем время экспозиции. Другие, недавно разработанные рассеиватели используют механическое движение для рассеивания спеклов. Одна из проблем, связанных с этими механическими рассеивателями, заключается в том, что движение рамки для рассеивания спеклов может также вызвать вибрацию самого рассеивателя. Кроме того, многие механические рассеиватели обеспечивают только одно направление возвратно-поступательного движения (например, вертикальное или горизонтальное), что требует, чтобы частота движения была больше 24 Герц (Гц), чтобы исключить появление спеклов для зрительной системы человека. Кроме того, многие механические рассеиватели изготавливают с использованием множества деталей, что увеличивает сложность, стоимость и ресурсы, необходимые для изготовления таких устройств. Кроме того, движение, создаваемое механическими рассеивателями, вызывает трение и износ устройства, что ограничивает общий срок службы рассеивателя.
Краткое описание чертежей
Варианты осуществления будет легко понять из следующего подробного описания в сочетании с сопроводительными чертежами и прилагаемой формулой изобретения. Варианты осуществления проиллюстрированы на примере, а не посредством ограничений, на фигурах на прилагаемых чертежах.
На фиг. 1 схематично показана система индикации на лобовом стекле (HUD), использующая проектор с лазерным источником света, в соответствии с различными вариантами осуществления. На фиг. 2 приведен вид в перспективе рассеивающего устройства в соответствии с различными вариантами осуществления. На фиг. 3 приведен вид спереди рассеивающего устройства в соответствии с различными вариантами осуществления. На фиг. 4 приведен вид по частям рассеивающего устройства в соответствии с различными вариантами осуществления. На фиг. 5 приведен вид сбоку или сверху рассеивающего устройства в соответствии с различными вариантами осуществления. На фиг. 6 приведен другой вид в перспективе рассеивающего устройства в соответствии с различными вариантами осуществления. На фиг. 7 приведен пример приводных элементов в соответствии с различными вариантами осуществления. На фиг. 8 и 9 показаны примерные модели движения для рассеивающего устройства в соответствии с вариантами осуществления, показанными на фиг. 2-7.
На фиг. 10 приведен пример HUD-системы для транспортного средства в соответствии с различными вариантами осуществления. На фиг. 11 приведен пример системы отображения, выполненной с возможностью взаимодействия с бортовой операционной системой транспортного средства в соответствии с различными вариантами осуществления. На фиг. 12 приведен пример реализации встроенного в транспортное средство вычислительного устройства в соответствии с различными вариантами осуществления.
Подробное описание изобретения
Последующее подробное описание относится к прилагаемым чертежам, на которых в качестве иллюстрации показаны варианты осуществления, которые могут быть реализованы на практике. Одни и те же ссылочные номера могут быть использованы на разных чертежах для обозначения одних и тех же или похожих элементов. Различные операции могут быть описаны как несколько отдельных операций по очереди, таким образом, который может быть полезен для понимания вариантов осуществления; однако порядок описания не следует толковать как подразумевающий, что эти операции зависят от порядка. В описании могут быть использованы описания, основанные на перспективе, такие как вверх/вниз, сзади/спереди, сверху/снизу и тому подобное. Такие описания используют просто для облегчения обсуждения, и они не предназначены для ограничения применения раскрытых вариантов осуществления.
В последующем описании, в целях пояснения, а не ограничения, изложены конкретные детали, такие как конкретные конструкции, архитектуры, технологии и т.д., чтобы обеспечить полное понимание различных аспектов вариантов осуществления. Однако в некоторых случаях описания хорошо известных элементов, устройств, компонентов, схем, способов и т.д. опускают, чтобы не загромождать описание вариантов осуществления ненужными подробностями. Специалистам в данной области, использующим настоящее раскрытие, будет очевидно, что аспекты вариантов осуществления могут быть реализованы способами, которые отличаются от конкретных деталей, обсуждаемых в этом документе. Следует понимать, что могут быть использованы другие варианты осуществления, и могут быть внесены структурные или логические изменения, не выходя за рамки настоящего раскрытия. Следовательно, последующее подробное описание не следует воспринимать в ограничивающем смысле.
Варианты осуществления, обсуждаемые в этом документе, включают в себя рассеиватель для лазерных проекторов. Лазерный проектор может включать в себя источник лазерного излучения для генерации лазерного излучения. Рассеиватель может быть использован в проекторе любого типа или с ним для уменьшения спеклов и сглаживания проецируемых изображений. Рассеиватель включает в себя рассеивающий экран (например, матовую стеклянную пластину, матовое зеркало и/или подобное), через который пропускают лазерный свет, излучаемый источником лазерного света. Рассеиватель способен уменьшать спекл-шум, генерируемый в изображении проецируемого света, путем вибрации и/или колебания рассеивающего экрана. Это также сглаживает изображения, создаваемые проецируемым светом. Рассеиватель уменьшает спеклы и сглаживает проецируемые изображения с помощью замкнутого кругового или возвратно-поступательного движения рассеивающего экрана в плоскости рассеивающего экрана. Рассеиватель включает в себя приводной механизм, который обеспечивает бесшумную (или почти бесшумную) работу привода, достигаемую за счет отсутствия пар трения в рассеивателе. Отсутствие пар трения в рассеивателе уменьшает или устраняет механический износ, что позволяет увеличить срок службы рассеивателя (по сравнению с обычными рассеивателями). В рассеивателе используют подвесные элементы, такие как стержни или тому подобное, причем оси стержней направлены перпендикулярно рабочей плоскости рассеивающего экрана, что позволяет удалять направляющие, направляющие рельсы и/или другие конструктивные элементы, которые используют в обычных рассеивателях для направления траектории движения рассеивающего экрана. Удаление этих элементов позволяет увеличить срок службы рассеивателя. Это также уменьшает количество компонентов рассеивателя, что снижает сложность изготовления. Рассеиватель может потреблять меньше энергии (по сравнению с обычными рассеивателями) за счет работы приводного механизма на резонансной частоте рассеивателя или системы, в которой реализован рассеиватель. Могут быть описаны и/или заявлены другие варианты осуществления.
Теперь со ссылкой на чертежи, на фиг. 1 показан пример проекционной системы 10, использующей проектор 13 с лазерным источником 13 света, в соответствии с различными вариантами осуществления. Проекционная система 10 содержит источник 11 лазерного света, проекционный блок 13, оптический элемент 14, рассеивающий экран 15, матрицу 16 формирования изображения и экран 17, такой как лобовое стекло транспортного средства, экран/стекло дисплея, устанавливаемого на голову, или тому подобное. В примере на фиг. 1 источник 11 лазерного излучения генерирует лазерный луч 12, который проецирует проекционный блок 13. Проекционный блок 13 генерирует и/или проецирует свет, представляющий по меньшей мере одно виртуальное изображение, через оптический элемент 14, рассеивающий экран 15 и, отраженный или иным образом направленный матрицей 16 формирования отображения, на экран 17.
В некоторых реализациях оптический элемент 14 представляет собой или включает в себя коллиматор (например, набор линз (включающий в себя одну или несколько линз), диафрагмы и т.д.), который преобразует расходящийся свет от источника 11 света в параллельный луч(и). В некоторых реализациях оптический элемент 14 может включать в себя или представлять собой объединитель (также называемый "объединяющей оптикой" или подобным), который может объединять различные световые пути в один световой путь для определения палитры цветов. В некоторых реализациях оптический элемент 14 может содержать сканирующие зеркала, которые копируют изображение попиксельно и затем проецируют изображение для отображения. В некоторых реализациях оптический элемент 14 может отсутствовать. Размещение вышеупомянутых оптических элементов 14 может варьироваться от варианта осуществления к варианту осуществления, в зависимости от используемой реализации.
Свет/лучи, проходящие через оптический элемент 14, далее проходят через рассеивающий экран 15 и попадают на матрицу 16 формирования изображения. Матрица 16 формирования изображения, в свою очередь, избирательно распределяет и/или распространяет виртуальное изображение, полученное в виде света/луча(лучей) от проекционного блока 13 через оптический элемент 14 и/или рассеивающий экран 15, в виде одного или нескольких волновых фронтов на экран 17. В некоторых примерах экран 17 представляет собой лобовое стекло транспортного средства, голографическую пленку 17а, размещенную на экране 17 или рядом с ним, или их комбинацию. В качестве примеров матрица 16 формирования изображения может содержать одно или несколько зеркал, жидкокристаллический дисплей (LCD), цифровое микрозеркальное устройство (DMD), микроэлектромеханический (MEMS) лазерный сканер, матрицу жидких кристаллов на кремнии (LCoS), матовое стекло с проецируемым изображением, другие типы матриц формирования изображения или любую их комбинацию. В некоторых вариантах осуществления матрица 16 формирования изображения может представлять собой или может быть включена в проекционный блок 13 (или PGU 1230, как описано ниже). В некоторых реализациях матрица 16 формирования изображения может отсутствовать.
В некоторых реализациях проекционная система 10 содержит прозрачную голографическую пленку 17а, встроенную в экран 17 или иным образом прикрепленную к нему. В качестве альтернативы, голографическая пленка 17а может быть размещена на экране 17 (не показана отдельно от системы 10) и/или размещена между наблюдателем 75 и экраном 17. В некоторых примерах голографическая пленка 17а может содержать множество коллиматоров, встроенных в пленку 17а, для коллимирования и/или комбинирования света, излучаемого матрицей 16 формирования изображений, с изображениями объектов реального мира, проходящими через пленку 17а к наблюдателю 75. Может быть полезно разработать проекционную систему 10, имеющую длительный срок службы, с низким энергопотреблением и/или с относительно бесшумной работой для проекционной системы 10 и/или для HUD в различных типах транспортных средств.
Обратимся теперь к фиг. 2-6, на которых показаны различные виды примера устройства 20 для рассеивания спеклов в соответствии с различными вариантами осуществления. В частности, на фиг. 2 приведен вид в перспективе рассеивающего устройства 20 в соответствии с различными вариантами осуществления, на фиг. 3 приведен вид спереди рассеивающего устройства 20 в соответствии с различными вариантами осуществления, на фиг. 4 приведен вид по частям рассеивающего устройства 20 в соответствии с различными вариантами осуществления, на фиг. 5 приведен вид сбоку рассеивающего устройства 20 в соответствии с различными вариантами осуществления, и на фиг. 6 приведен другой вид в перспективе рассеивающего устройства 20 в соответствии с различными вариантами осуществления. Рассеиватель 20 спеклов может быть использован с лазерным проектором в соответствии с различными вариантами осуществления. Рассеивающее устройство 20 используют для приложения вибраций, сотрясений и/или других движений к элементу 100 рассеивания спеклов. Рассеивающий элемент 100 способен пропускать (или отражать) лазерный свет, проецируемый на рассеивающий элемент 100 или через него.
Как показано на фиг. 2-6, рассеивающее устройство 20 содержит рассеивающий элемент 100 (также называемый "рассеивающий элемент 100", "рассеиватель 100" и т.п.), раму 110, одну или несколько катушек 112, один или несколько взаимодействующих элементов 140, один или несколько неподвижных элементов 120, и один или несколько подвесных элементов 150. В показанных вариантах осуществления рассеивающее устройство 20 включает в себя четыре подвесных элемента 150 и три магнитных крепления 130; однако другие варианты осуществления могут включать в себя любое количество подвесных элементов 150 и/или любое количество магнитных креплений 130.
Рассеивающий элемент 100 установлен в раме 110 или на ней, или иным образом соединен с рамой 110 с использованием любого подходящего крепежного средства. Раму 110, включающую в себя рассеивающий элемент 100, можно назвать "вспомогательным узлом рассеивателя" или подобным. Рассеивающий элемент 100 может быть изготовлен из любого подходящего материала, такого как стекло, матовое стекло, пришлифованное стекло, диоксид кремния, плавленый диоксид кремния, опал, керамические материалы, сапфир, кварц, фторид кальция (CaF2), фторид магния (MgF2), селенид цинка (ZnSe), пластик, матовый пластик, полиметил метакрилат (ПММА) и/или подобное и/или их комбинации. В некоторых реализациях рассеивающий элемент 100 представляет собой или включает в себя рассеиватель с массивом микролинз (например, имеющих размер примерно от 10 микрометров (мкм) до менее одного миллиметра (мм)), такой как, например, массив линз с градиентным индексом (GRIN), массив микролинз Френеля, массив двоично-оптических микролинз, массивы микролинз с круглыми отверстиями, массивы микролинз с некруглыми отверстиями. Рассеивающий элемент 100 может иметь геометрию/форму (например, размеры (высота, ширина, глубина) и кривизну (вогнутая, плоская, выпуклая и т.д.)) в зависимости от формы и признаков конструкции/рамы 110 устройства 20 и/или может зависеть от применения/реализации. Рассеивающий элемент 100 может быть изготовлен или сформирован с использованием любых подходящих средств изготовления.
Рама 110 удерживает или иным образом поддерживает рассеивающий элемент 100 во время колебаний, сотрясения или других перемещений в плоскости рассеивателя. Перемещения или движения могут происходить в любом направлении в плоскости рассеивателя и/или могут включать в себя любую траекторию, включая вращательные движения. В примере на фиг. 2 плоскость рассеивателя изображена пересекающимися линиями в центральной части рассеивающего элемента 100 со стрелками на каждом конце каждой линии. Вращательные движения обсуждаются ниже в отношении фиг. 8 и 9. В некоторых реализациях рама 110 может представлять собой печатную плату (PCB). Однако рама 110 может быть изготовлена из любого подходящего материала (или комбинации материалов), такого как фенолы или фенолформальдегид (PF), включая фенольную бумагу, пропитанную фенольной смолой или PF-смолой, стекловолокно и/или стекловолокно, пропитанное эпоксидной смолой, углеродное волокно, матовое стекло с полиэфиром, политетрафторэтилен (PTFE), PTFE с керамическим наполнителем, алюминий, оксид алюминия (глинозем), полимид, поливинилхлорид (ПВХ), поликарбонат (ПК), полиимид(ы), акрилонитрилбутадиенстирол (АБС), полиэфирэфиркетон (PEEK), полиарилэфиркетон (PAEK), полидикетоенамин (PDK), оксидный материал (например, оксид кремния (SiO), диоксид кремния (SiO2) и т.д.), ферромагнитные металлы или сплавы (например, железо, никель, кобальт, гадолиний, диспрозий, сталь, стальные сплавы и т.д.) с некоторым диэлектрическим покрытием или слоем и/или любого другого подходящего материала и/или любой их комбинации. Рама 110 может быть изготовлена или сформирована с использованием любых подходящих средств изготовления. Кроме того, геометрия (форма) рамы 110 может отличаться от формы, изображенной в примере на фиг. 2-6, в зависимости от формы и признаков рассеивающего элемента 100.
Рассеиватель 20 спеклов установлен в проекционной системе (например, HUD-системе 1000 на фиг. 10, системе отображения виртуальной реальности (VR) и/или дополненной реальности (AR) и т.п.) с использованием одного или нескольких подвесных элементов 150. В вариантах осуществления подвесные элементы 150 представляют собой стержни (или "подвесные стержни" 150), однако в других вариантах осуществления могут быть использованы другие средства подвески. Каждый подвесной элемент 150 вставляют в соответствующие отверстия (или сквозные отверстия) 350 в раме 110 (см., например, фиг. 3) таким образом, что каждый подвесной элемент 150 перпендикулярен (или по существу перпендикулярен) раме 110 (см., например, фиг. 2 и 5). В других вариантах осуществления подвесные элементы 150 могут иметь некоторое другое положение, ориентацию и/или компоновку, которая допускает или дает возможность перемещения рассеивающего элемента 100 в плоскости рассеивателя. Как показано на фиг. 6, подвесные элементы 150 также соединены с корпусом 610, который может быть изготовлен или сформирован с использованием любого подходящего способа изготовления. В частности, на фиг. 6 один конец каждого подвесного элемента 150 вставлен в соответствующий разъем 650 для стержня, который выполнен в корпусе 610 (или иным образом прикреплен к нему); а второй конец каждого подвесного элемента 150 вставлен в отверстия 350 или сквозь них (не обозначены на фиг. 6). В различных вариантах осуществления подвесные элементы 150 расположены перпендикулярно (или по существу перпендикулярно) раме 110 (и рассеивающему элементу 100), чтобы позволить рассеивающему элементу 100 перемещаться циклически или эллиптически. Перпендикулярная ориентация подвесных элементов 150 обеспечивает рассеивающему элементу 100 больше степеней свободы для перемещения в любом направлении в плоскости рассеивания (см., например, фиг. 6 и 8-9) по сравнению с существующими механизмами рассеивания спеклов.
Подвесные элементы 150 могут быть изготовлены (или сформированы из) любого подходящего материала, который позволяет раме 110 с рассеивающим элементом 100 перемещаться в любом направлении в плоскости рассеивающего элемента и фиксировать раму 110 с рассеивающим элементом 100 в любом другом направлении. Материал подвесных элементов 150 должен быть достаточно гибким, чтобы выдерживать колебания и/или другие перемещения рамы 110 с рассеивающим элементом 100. Как показано на фиг. 5, гибкость подвесного элемента 150 показана величиной изгиба 550 (и пунктирными линиями). На фиг. 5 также показано смещение 500 рамы 110. Например, в некоторых вариантах осуществления подвесные элементы 150 являются достаточно гибкими, чтобы обеспечить перемещение рассеивающего элемента 100 примерно на 0,01 миллиметра (мм) в любом направлении в плоскости рассеивателя. В качестве примеров, подвесные элементы 150 могут быть изготовлены или сформированы из углерода, графита (например, кристаллического углерода), углеродного волокна, стекловолокна, PTFE с керамическим наполнителем, алюминия, оксида алюминия (глинозема), полимида, ПВХ, ПК, полиимида(ов), ABS, PEEK, PAEK, PDK, оксидного материала (например, SiO, SiO2 и т.д.), стали, углеродистой стали, пружинной стали, стальных сплавов (например, включающих в себя легирующие элементы в дополнение к железу и углероду) и/или любого другого подходящего материала и/или любой их комбинации. В некоторых вариантах осуществления диаметр каждого подвесного элемента 150 составляет около 0,05 мм, хотя в других вариантах осуществления диаметр подвесных элементов 150 может быть другим. Диаметр отверстий 350 может быть просверлен или сформирован достаточно большим для надежного размещения подвесных элементов 150. Подвесные элементы 150 могут быть изготовлены или сформированы с использованием любых подходящих средств изготовления.
Как показано на фиг. 2-6, рассеивающее устройство 20 также включает в себя приводные узлы, каждый из которых включает в себя неподвижный элемент 120, приводной элемент 130 и взаимодействующий элемент 140. Неподвижный элемент 120, приводной элемент 130 и взаимодействующий элемент 140 могут быть изготовлены или сформированы с использованием любых подходящих средств изготовления, включая одинаковые или различные средства изготовления для каждого из неподвижного элемента 120, приводного элемента 130 и взаимодействующего элемента 140. Как показано на фиг. 6, каждый из неподвижных элементов 120 соединен с корпусом 610 (также называемым "оптическим корпусом 610"). В качестве примеров, корпус 610 может представлять собой корпус/футляр для гарнитуры VR/AR, корпус HUD-системы или подобное. Корпус 610 может быть изготовлен из любых подходящих материалов, таких как любой из тех, которые обсуждаются в этом документе, или их комбинации.
Каждый неподвижный элемент 120 соединен с соответствующим участком 620 корпуса 610. Соединение неподвижных элементов 120 с участками 620 корпуса 610 может быть выполнено с помощью любого подходящего крепежного средства. Каждый взаимодействующий элемент 140 соединен с соответствующим неподвижным элементом 120. В вариантах осуществления взаимодействующие элементы 140 установлены на неподвижных элементах 120 в соответствии с их полярностью для обеспечения магнитной (или электромагнитной) силы в направлениях, показанных стрелками на фиг. 2, 5-6 и 8-9. Кроме того, приводные элементы 130 прикреплены к раме 110 или встроены в нее, как показано на фиг. 2-7.
Как показано на фиг. 2-3 и 5-6, каждый неподвижный элемент 120 перекрывает соответствующую часть рамы 110, которая включает в себя приводной элемент 130. Каждый неподвижный элемент 120 содержит соответствующий взаимодействующий элемент 140 так, что поверхность соответствующего взаимодействующего элемента 140 обращена к соответствующему приводному элементу 130 в/на раме 110. Как показано на фиг. 5, приводные элементы 130 прикреплены к раме 110 или установлены на обеих ее сторонах. На фиг. 5 показано, что каждый неподвижный элемент 120 имеет два выступа и образует "C-образную" или "U-образную" форму, а взаимодействующие элементы 140 прикреплены к внутренней поверхности каждого выступа. Здесь внутренняя поверхность представляет собой поверхность каждого выступа, которая обращена к другому выступу или приводному элементу 130 на поверхности рамы 110. Как более подробно обсуждается ниже, каждая пара приводной элемент 130 - взаимодействующий элемент 140 (также называемая "приводной парой 130-140" или т.п.) генерирует движущую силу, которая вибрирует и/или колеблет рассеивающий элемент 100 для уменьшения спеклов от генерируемого света.
В различных вариантах осуществления взаимодействующие элементы 140 и/или приводные элементы 130 являются магнитами. В некоторых вариантах осуществления взаимодействующими элементами 140 являются магниты, включающие в себя постоянные магниты, ферромагнитные материалы (например, включая магнитомягкие материалы, такие как железо, или магнитожесткие материалы, такие как алнико и феррит), редкоземельные магниты (например, самарий-кобальтовые магниты (SmCo), неодим-железо-борные (NdFeB или "NIB") магниты и т.д.), композитные магниты (например, керамические или ферритовые магниты, гибкие магниты (например, оксид железа, смешанный с пластиковым связующим веществом), алюминий-никель-кобальтовые магниты (алнико) и т.д.) и/или тому подобное. В других вариантах осуществления взаимодействующие элементы 140 могут включать в себя один или несколько электромагнитов, каждый из которых образован одной или несколькими катушками или соленоидами. В этих вариантах осуществления каждая из катушек может быть (или не быть) намотана вокруг ферромагнитного мягкого материала, такого как железо, сталь и/или тому подобное. В качестве альтернативы, электромагниты взаимодействующих элементов могут быть такими же или подобными тем, которые описаны на фиг. 7. В любом из вышеупомянутых вариантов осуществления приводные элементы 130 могут содержать один или несколько электромагнитов, которые более подробно обсуждаются в отношении фиг. 7.
На фиг. 7 показан пример приводного элемента 130, где рама 110 представляет собой многослойную печатную плату (также называемую "печатной платой 110" или т.п.). Приводной элемент 130 включает в себя несколько слоев 112, составляющих приводной элемент 130. Слои 112 также могут соответствовать отдельным проводящим слоям печатной платы 110 или быть их частью. Каждый слой 112 включает в себя одну или несколько катушек 705 (или микрокатушек 705).
Каждая катушка 705 (например, катушка 705A или катушка 705B) может быть сформирована из одной дорожки (например, медного печатного проводника), которая проходит вокруг себя в виде спирали или спиралеобразного рисунка, примеры которого показаны на увеличенных видах 700A и 700B. В частности, на увеличенном виде 700A показан прямоугольный рисунок 705A катушки (также называемой "катушкой 705A" или "катушками 705A"), а на увеличенном виде 700B показаны обе стороны кругового рисунка 705B катушки (также называемой "катушкой 705B" или "катушками 705B"). Могут быть применены другие схемы расположения/рисунки катушек, такие как квадратный рисунок катушки, эллиптический рисунок катушки и/или какой-либо другой многоугольный рисунок катушки. В дополнение или в качестве альтернативы, рисунки/схемы спиралей могут включать в себя несколько извилистых поворотов или петель. В дополнение или в качестве альтернативы, может быть использовано несколько различных рисунков катушек.
Все слои 112 приводного элемента 130 (и печатной платы 110) уложены друг на друга и соединены между собой, образуя непрерывные дорожки, тем самым создавая плоские электрические катушки 705. Уложенные друг на друга индуктивные катушки 705 созданы путем укладки слоев 112 друг на друга и путем соединения отдельных катушек 705 друг с другом с помощью переходных отверстий в печатной плате 110. В дополнение, несколько катушек 705 могут быть расположены друг относительно друга и относительно соответствующего взаимодействующего элемента 140 таким образом, чтобы создавать линейный привод, линейный двигатель, линейный асинхронный двигатель (LIM), двигатель с подвижной катушкой и/или подобную конструкцию. Например, катушки 705, расположенные или размещенные друг рядом с другом, могут иметь противоположные направления намотки для создания различных полюсов магнитного поля для притяжения или отталкивания магнитного поля, создаваемого магнитами взаимодействующего элемента 130.
Для приведения в действие привода электрический ток подают на катушку (катушки) 705 каждого приводного элемента 130. Электрический ток, распространяющийся через каждую катушку 705, генерирует магнитное поле, которое проходит через центр каждой катушки 705 вдоль ее продольной оси. Магнитное поле, создаваемое током, направлено перпендикулярно направлению протекания тока, и направление магнитного поля зависит от направления протекания тока. Любое подходящее средство подачи питания или электрического тока/средство электропитания (например, батарея 1224 и/или блок 1228 питания на фиг. 12) может быть использовано для подачи тока на катушки 705, и конкретное средство подачи тока на катушки 705 должно быть в рамках компетенции квалифицированного специалиста.
Например, включением/выключением питания приводного элемента 130 и величиной тока, подаваемого на приводной элемент 130 (который может влиять на силу и направление электромагнитного поля приводного элемента 130), может управлять контроллер. Контроллер предназначен или выполнен с возможностью подавать изменяющиеся величины тока (или изменяющиеся импульсы тока) на катушки 705 для управления силой и направлением магнитных полей. Различные напряженности магнитного поля могут обеспечивать различные частоты колебаний для рассеивающего элемента 100, который может обеспечивать рассеивание спеклов для различных частот/величин лазерного излучения 12. Большинство частот колебаний может быть достигнуто с использованием различных комбинаций импульсов тока, например, с использованием модуляции со смещением фазы, широтно-импульсной модуляции и/или других подобных схем модуляции. Контроллер может представлять собой любое подходящее вычислительное устройство (см., например, фиг. 12), такое как микропроцессор или процессор специального назначения, специально построенный и конфигурируемый для управления приводным элементом 130 (называемое в дальнейшем "контроллером"). Хорошо известные соединения питания/заземления с источником(ами) питания, микросхемы интегральной схемы (ИС) и другие компоненты не показаны на фиг. 1-9 для простоты иллюстрации и обсуждения, а также для того, чтобы не загромождать описание показанных вариантов осуществления. В качестве примеров, электронный блок управления (ECU) 1224, привод 1222, микроконтроллер или микропроцессор PGU 1230 (см., например, обсуждение в отношении фиг. 11-12 ниже) могут быть контроллером, который подает ток на приводной элемент 130.
На фиг. 8 и 9 показана модель 800 перемещения рассеивающего устройства 20 в соответствии с различными вариантами осуществления. На фиг. 8 показан вид спереди рассеивающего устройства 20, а на фиг. 9 показан вид сверху рассеивающего устройства 20. Как упоминалось ранее, движение рассеивателя 20 спеклов инициируют, когда каждый приводной элемент 130 включен и взаимодействует посредством магнетизма с соответствующим взаимодействующим элементом 140. Магнитное поле, создаваемое приводными элементами 130, взаимодействует с взаимодействующими элементами 140 (например, постоянными магнитами, ферромагнетиками, магнитопроводами и т.д.), закрепленными или присоединенными к неподвижным элементам 120 рассеивающего устройства 20. Это вызывает движение так же, как линейный привод, линейный двигатель, LIM, двигатель с подвижной катушкой или т.п. Комбинация перемещений, генерируемых каждой приводной парой 130-140, приводит к круговому или эллиптическому перемещению 810 рамы 110, как показано на фиг. 8. В дополнение или в качестве альтернативы, подача импульсов тока через отдельные приводные элементы 130 с различными скоростями, силой и/или временем может вызывать колебание/вибрацию рассеивающего элемента 100.
В примере на фиг. 8 и 9 результирующая сила, генерируемая магнитными полями, основана на напряженности магнитного поля взаимодействующих элементов 140, величине тока, проходящего через катушки 705 (I), и длине провода, составляющего катушки 705 (l). Со ссылкой на фиг. 8, боковые перемещения выражают с помощью уравнения F(t) = I*L2*B*sin(ωt), а вертикальные перемещения выражаются с помощью уравнения F(t) = I*L1*B*sin(ωt +φ), где F - сила или приводное усилие, L1 и L2 - общая длина проводника, который взаимодействует с магнитным полем, создаваемым магнитами, B - амплитуда (например, максимальное смещение от положения равновесия) для каждой волны, ω - частота (или угловая частота, например, ω = 2πf, где f - обычная частота или число колебаний), t - время, а φ - фазовый сдвиг или фазовая постоянная (например, начальная фаза).
Со ссылкой на фиг. 9, изображенный взаимодействующий элемент 140 в этом варианте осуществления содержит несколько магнитов (например, редкоземельных магнитов или подобных), установленных с переменной полярностью на неподвижных элементах 120 (не показаны), где метка "S" означает южный полюс, а метка "N" означает "северный полюс". Магниты создают магнитные поля 905A и 905B, перпендикулярные раме 110 и проходящие в направлениях противоположных друг другу. B(t) представляет плотность магнитного поля или плотность магнитного потока магнитных полей 905A и 905B, а "const" является постоянной величиной.
В различных вариантах осуществления к приводному элементу 130 подключен источник питания, который подает электрический ток через катушки 705 приводного элемента 130. Символом  обозначен ток, вытекающий из плоскости страницы, и магнитное поле против часовой стрелки, создающее северный полюс, а символом
обозначен ток, вытекающий из плоскости страницы, и магнитное поле против часовой стрелки, создающее северный полюс, а символом  обозначен ток, втекающий в плоскость страницы, и магнитное поле по часовой стрелке, создающее южный полюс. Величина тока, протекающего через приводной элемент 130, выражается как I(t) = I sin(ωt), где I - средний ток, а I(t) - мгновенный ток в момент времени t. При изменении фазы тока в катушках 705 изменяется полярность каждой катушки 705. Силы притяжения и отталкивания между катушками 705 в приводном элементе 130 и магнитами взаимодействующего элемента 140 заставляют раму 110 перемещаться и генерировать линейную силу 910. Скорость движения, создаваемого линейной силой 910, основана на скорости изменения тока, а сила тока определяет величину генерируемой силы 910. Скорость движения можно изменять, изменяя входную частоту с помощью частотно-регулируемого привода или контроллера. Уравнение F(t)=I*L*B*sin(ωt) (или F(t)=I*L*B*sin(ωt+φ)) является тем же, что обсуждалось ранее в отношении фиг. 8, а показанная стрелка обозначает направление движения рамы 110 и/или усилия или тяги 910.
обозначен ток, втекающий в плоскость страницы, и магнитное поле по часовой стрелке, создающее южный полюс. Величина тока, протекающего через приводной элемент 130, выражается как I(t) = I sin(ωt), где I - средний ток, а I(t) - мгновенный ток в момент времени t. При изменении фазы тока в катушках 705 изменяется полярность каждой катушки 705. Силы притяжения и отталкивания между катушками 705 в приводном элементе 130 и магнитами взаимодействующего элемента 140 заставляют раму 110 перемещаться и генерировать линейную силу 910. Скорость движения, создаваемого линейной силой 910, основана на скорости изменения тока, а сила тока определяет величину генерируемой силы 910. Скорость движения можно изменять, изменяя входную частоту с помощью частотно-регулируемого привода или контроллера. Уравнение F(t)=I*L*B*sin(ωt) (или F(t)=I*L*B*sin(ωt+φ)) является тем же, что обсуждалось ранее в отношении фиг. 8, а показанная стрелка обозначает направление движения рамы 110 и/или усилия или тяги 910.
В других вариантах осуществления взаимодействующий элемент 140 может включать в себя проводящий материал, а не постоянные магниты. В этих вариантах осуществления электрический ток индуцируют в проводящем материале взаимодействующего элемента 140 благодаря магнитному полю, создаваемому электрическим током, протекающим через приводной элемент 130. Это индуцирует вихревые токи во взаимодействующем элементе 140 при помещении его в магнитное поле приводного элемента 130, который создает противоположное магнитное поле в соответствии с законом Ленца. Два противоположных поля будут отталкивать друг друга, создавая движение, когда магнитное поле проходит через взаимодействующий элемент 140. Индуцированный ток взаимодействует с бегущей волной потока для создания линейной силы или тяги 910.
Комбинация различных электромагнитных сил на фиг. 8 и 9 обеспечивает модуляцию со смещением фазы. Модуляция со смещением фазы работает путем наложения двух экземпляров периодического волнового сигнала друг на друга и умножения волновых сигналов друг на друга или вычитания одного волнового сигнала из другого волнового сигнала. Величина смещения (например, разница между начальными точками двух волновых сигналов) определяет рабочий цикл, а переменная величина смещения создает широтно-импульсную модуляцию. Модуляция со смещением фазы, создаваемая объединенными электромагнитными силами и облегчаемая гибкостью подвесных элементов 150, вызывает замкнутую круговую/эллиптическую траекторию рассеивающего элемента 100. Кроме того, смещение фазы может быть согласовано с собственной резонансной частотой рассеивающего устройства 20 для снижения энергопотребления приводных элементов 130 (например, электромагнитных приводов).
Со ссылкой на фиг. 1-9, рассеивающее устройство 20 работает следующим образом. Источник 11 лазерного излучения генерирует лазерный луч 12, проецируемый проекционным блоком 13 через оптический элемент 14 и на поверхность рассеивающего элемента 100 (которая может соответствовать рассеивающему экрану 15 на фиг. 1), а затем на матрицу 16 формирования изображения. Рама 110 гибко висит на подвесных элементах 150. Контроллер вызывает передачу импульсов тока с определенной частотой от источника питания к приводным элементам 130. Ток, протекающий через приводные элементы 130 (например, включающие в себя катушки 705), приводит к возникновению магнитной силы, действующей в плоскости рассеивателя. Приводные элементы 130 взаимодействуют со взаимодействующими элементами 140, что заставляет раму 110 с рассеивающим элементом 100 наклоняться или перемещаться в направлении магнитной силы. Движение рамы 110 представляет собой систему с замкнутым контуром, где движение, вызванное первой приводной парой 130-140, влияет на величину и направление движения второй приводной пары 130-140, которая затем влияет на величину и направление движения третьей приводной пары 130-140, а затем возвращается и влияет на величину и направление движения первой приводной пары 130-140. В дополнение, перемещение рамы 110 частично обеспечивают за счет деформации гибких подвесных элементов 150, на которых висит рама 110. Эффект спеклов уменьшается в плоскости изображения, и проецируемое изображение сглаживается для глаза наблюдателя 75 за счет непрерывного циклического или возвратно-поступательного перемещения каждой точки на поверхности рассеивающего элемента 100. Таким образом, рассеивающее устройство 20 способно обеспечить бесшумную (или почти бесшумную) работу и практически полное отсутствие механического износа благодаря отсутствию пар трения в рассеивающем устройстве 20. Поскольку движение, обеспечиваемое приводными парами 130-140, не вызывает трения, рассеивающее устройство 20 не подвержено механическому износу, как в случае с большинством обычных рассеивателей. Устойчивость к внешней вибрации также достигается за счет упругого подвешивания подвесных элементов 150.
Рассеивающее устройство 20 может работать как система управления с замкнутым контуром, которая представляет собой систему управления, в которой отслеживают обратную связь и используют для управления работой элементов в системе таким образом, чтобы стремиться (или пытаться) уменьшить отклонение до нуля. Управляющее воздействие (например, управляющие сигналы и т.д.) от контроллера зависит от обратной связи от процесса в виде значения переменной процесса (PV). Например, один или несколько датчиков (например, датчики 1221 на фиг. 12) могут быть использованы для измерения скорости кругового перемещения 810 рамы 110 и/или рассеивающего элемента 100, которую затем сравнивают с заданным значением скорости (SP) или пороговым значением. В этом примере контроллер генерирует и выдает управляющие сигналы для поддержания скорости на требуемом уровне путем изменения величины тока, подаваемого на приводные элементы 130, или путем подачи импульсов (например, включения/выключения) тока, подаваемого на приводные элементы 130. В другом примере один или несколько датчиков могут быть использованы для измерения значения тока и/или напряжения, подаваемого на приводные элементы 130, которое затем сравнивают с заданным значением SP тока/напряжения или пороговым значением тока/напряжения. В этом примере контроллер генерирует и выдает управляющие сигналы для поддержания тока/напряжения на требуемом уровне тока/напряжения путем управления включением и выключением источника питания. В других вариантах осуществления могут быть измерены другие переменные, и могут быть использованы другие механизмы управления.
На фиг. 10 показан пример HUD-системы 1000 для транспортного средства 1005, с несколькими плоскостями изображения, включая первую плоскость 1010 изображения, вторую плоскость 1020 изображения и третью плоскость 1030 изображения. В некоторых примерах первая плоскость 1010 изображения может быть связана с фокусным расстоянием A, вторая плоскость 1020 изображения может быть связана с фокусным расстоянием B, а третья плоскость 1020 изображения может быть связана с фокусным расстоянием, которое приближается к бесконечности.
Когда транспортное средство 1005 движется на сравнительно высокой скорости, например, по нерегулируемому шоссе со скоростью более 40 миль в час, система 1050 проецирования изображения может быть выполнена с возможностью отображения одного или нескольких сгенерированных компьютером виртуальных графических изображений, например, изображений, текста или отображаемой информации других типов оператору транспортного средства или наблюдателю 1075 на третьей плоскости изображения 1030. В некоторых примерах третья плоскость 1030 изображения может приближаться к предварительно заданному расстоянию, например, расстоянию, превышающему двадцать метров, от транспортного средства 1005. На сравнительно высоких скоростях наблюдатель 1075 обычно может смотреть вдоль дороги и сканировать объекты, которые могут быть расположены на расстояниях, превышающих заданное расстояние в двадцать метров. Соответственно, HUD-система 1000 может быть выполнена таким образом, чтобы фокальная плоскость, связанная со сгенерированной компьютером виртуальной графикой, совпадала с относительно удаленными объектами, которые просматривает наблюдатель 1075.
С другой стороны, если транспортное средство движется на средней скорости, например, когда наблюдатель 1075 ведет транспортное средство 1005 по городским улицам или по перегруженным магистралям со скоростью выше 20 миль в час, но ниже 40 миль в час, HUD-система 1000 может проецировать виртуальную графику на вторую плоскость 1020 изображения, чтобы она совпадала с объектами, которые расположены на фокусном расстоянии B от транспортного средства 1005. В некоторых примерах фокусное расстояние B, связанное со второй плоскостью 1020 изображения, может составлять менее двадцати метров, например, приблизительно десять метров.
Если транспортное средство 1005 движется со сравнительно низкой скоростью, например, когда наблюдатель 1075 управляет транспортным средством 1005 около парковки или места аварии со скоростью ниже 20 миль в час, HUD-система 1000 может быть выполнена с возможностью проецирования виртуальной графики на первую плоскость 1010 изображения, чтобы она совпадала с объектами, которые расположены на фокусном расстоянии A от транспортного средства 1005. В некоторых примерах фокусное расстояние A, связанное с первой плоскостью 1010 изображения, может составлять менее десяти метров, например, приблизительно от трех до пяти метров.
На фиг. 11 приведен пример системы 1100 отображения, выполненной с возможностью взаимодействия с бортовой операционной системой 1120. Со ссылкой на фиг. 11, бортовая операционная система 1120 может содержать один или несколько процессоров транспортного средства или бортовых компьютеров, память любого известного типа и инструкции, хранящиеся в памяти, которые могут взаимодействовать с HUD-процессором 1110. В варианте осуществления система 1100 отображения может быть сконфигурирована для подключения к бортовой операционной системе 1120 через порт (OBD) бортовой системы диагностики транспортного средства 1005. HUD-процессор 1110 может быть выполнен с возможностью управлять или иным образом задействовать проекционное устройство 1130, которое, в свою очередь, может быть выполнено с возможностью генерации и/или проецирования света, представляющего по меньшей мере одно виртуальное изображение, на матрицу 1150 формирования отображения (которая, например, может быть такой же или подобной матрице 16 формирования отображения). HUD-процессор 1110 может определять виртуальную графику для отображения на устройстве 1160 отображения в соответствии с одним или несколькими HUD-приложениями и предоставлять индикацию виртуальной графики проекционному устройству 1130, которое, в свою очередь, может проецировать свет, представляющий виртуальную графику, на матрицу 1150 формирования отображения. В некоторых примерах одно или несколько оптических устройств 1140 или линз могут быть выполнены с возможностью исправления аберраций, фильтрации и/или повышения эффективности использования света. Оптические устройства 1140 могут включать в себя оптическое устройство любого типа (например, фильтры).
Матрица 1150 формирования изображения, в свою очередь, может быть выполнена с возможностью избирательного распределения и/или распространения виртуального изображения, принятого в виде света от проекционного устройства 1130 или оптических устройств 1140, в виде одного или нескольких волновых фронтов на устройство 1160 отображения. В некоторых примерах устройство 1160 отображения может содержать лобовое стекло транспортного средства (например, экран 17 на фиг. 1), голографическую пленку, размещенную рядом с лобовым стеклом (например, голографическую пленку 17а, показанную на фиг. 1), или их сочетание.
В некоторых примерах матрица 1150 формирования изображения может содержать голографический фазово-амплитудный модулятор, выполненный с возможностью имитации произвольного волнового фронта света. В варианте осуществления матрица 1150 формирования изображения может имитировать волновой фронт для каждой из нескольких плоскостей изображения, причем каждый волновой фронт представляет виртуальное изображение. Матрица 1150 формирования изображений может быть конфигурируемой для реализации произвольного числа виртуальных плоскостей изображения с одновременно и произвольно отображаемой на них информацией.
Матрица 1150 формирования изображения может содержать фазовый модулятор высокого разрешения, такой как полный модулятор высокой четкости, имеющий любое подходящее разрешение (например, разрешение 4000 пикселей или выше). Матрица 1150 формирования изображения может быть освещена когерентным светом, принимаемым от проекционного устройства 1130 или оптических устройств 1140 с заданной расходимостью луча. Матрица 1150 формирования изображения может создавать цифровую голограмму на модуляторе и может проецировать волновой фронт, представляющий голограмму, на устройство 1160 отображения одновременно на нескольких виртуальных плоскостях 1170 изображения.
Система отображения 1100 может быть выполнена с возможностью или может работать для создания одного или нескольких виртуальных графических изображений на плоскости 1170 изображения. В некоторых примерах плоскость 1170 изображения может быть связана с фокусным расстоянием 1175. Хотя плоскость 1170 изображения показана как расположенная с противоположной стороны устройства отображения 1160 от матрицы 1150 формирования отображения, в некоторых примерах осуществления устройство 1100 отображения может быть выполнено с возможностью отражения света, связанного с фронтом волны, распространяемым матрицей 1150 формирования отображения, так что результирующее изображение отражается к наблюдателю 1075. В то время как изображение может быть отражено от устройства 1160 отображения к наблюдателю 1075, плоскость изображения, тем не менее, может казаться наблюдателю 1075 расположенной на противоположной стороне устройства 1160 отображения (например, на той же стороне устройства отображения, что и объекты реального мира, за пределами транспортного средства).
В дополнение, система 1100 отображения может содержать устройство сдвига или двигатель 1180, выполненный с возможностью динамического изменения фокусного расстояния 1175, связанного с плоскостью 1170 изображения. В некоторых примерах двигатель 1180 может перемещать матрицу 1150 формирования изображения относительно устройства 1160 отображения в любом направлении (например, вертикальном или горизонтальном), а также изменять угол наклона устройства 1150 отображения. В других примерах двигатель 1180 может быть выполнен с возможностью перемещения одного или нескольких оптических устройств 1140 относительно матрицы 1150 формирования изображения. Еще более того, двигатель 1180 может быть выполнен с возможностью изменения фокусного расстояния 1145 между одним или несколькими оптическими устройствами 1140 и матрицей 1150 формирования изображения. Двигатель 1180 может динамически изменять фокусное расстояние 1175 путем перемещения матрицы 1150 формирования изображения относительно устройства 1160 отображения или относительно оптических устройств 1140 или путем перемещения оптических устройств 1140 относительно матрицы 1150 формирования изображения. В варианте осуществления двигатель 1180 может динамически изменять фокусное расстояние 1175 в соответствии с HUD-приложениями. HUD-приложения могут заставить двигатель 1180 изменять фокусное расстояние 1175 на основе, например, предварительно заданных рабочих параметров, включая параметры транспортного средства (например, скорость, местоположение, направление движения, пункт назначения, расположение лобового стекла, трафик и т.п.), параметры дороги (например, местоположение или присутствие объектов реального мира, дороги и т.п.), параметры наблюдателя транспортного средства (например, местоположение оператора внутри транспортного средства 1005, отслеживание глаз наблюдателя, местоположение глаз, положение системы и т.п.) или их сочетания. Рабочие параметры также могут включать в себя любой ввод, принятый от любого из нескольких источников, включая системы или настройки транспортного средства, включая, например, схему 1221 датчика, устройства 1286 ввода-вывода, приводные механизмы 1222, ECU 1224, схему 1245 позиционирования или их сочетание, как показано на фиг. 12. В дополнение к изменению фокусного расстояния 1175 плоскости 1170 изображения, двигатель 1180 может быть выполнен с возможностью регулировки относительного расстояния плоскости изображения до наблюдателя 1075. В варианте осуществления система 1100 отображения может быть выполнена с возможностью совместимости с рядом различных типов транспортных средств, которые могут быть связаны с различными положениями оператора, включая высоту глаз оператора или расстояние от оператора до лобового стекла (например, экрана 17, показанного на фиг. 1).
Хотя это не показано на фиг. 11, в различных вариантах осуществления система 1100 отображения может включать в себя несколько проекционных устройств 1130, оптических устройств 1140, матриц 1150 формирования отображения, устройств 1160 отображения и двигателей 1180, которые могут быть расположены во множестве компоновок.
На фиг. 12 показан пример вычислительной системы 1200, в соответствии с различными вариантами осуществления. Система 1200 может включать в себя любые комбинации компонентов, как показано, которые могут быть реализованы в виде интегральных схем (ИС) или их частей, отдельных электронных устройств или других модулей, логики, аппаратного обеспечения, программного обеспечения, микропрограммного обеспечения, промежуточного программного обеспечения или их сочетания, адаптированных в системе 1200, или в виде компонентов, иным образом включенных в более крупную систему, такую как транспортное средство и/или HUD-система. В дополнение или в качестве альтернативы, некоторые или все компоненты системы 1200 могут быть объединены и реализованы в виде подходящей системы на кристалле (SoC), системы в корпусе (SiP), многокристальной ИС (MCP) или некоторого другого подобного устройства. Система 1200 представляет собой встроенную систему или любой другой тип вычислительного устройства, обсуждаемый в этом документе. В другом примере система 1200 может представлять собой отдельное и выделенное и/или вычислительное устройство специального назначения, разработанное специально для выполнения голографических HUD-решений вариантов осуществления, обсуждаемых в этом документе.
Схема 1202 обработки содержит один или несколько элементов/устройств обработки, выполненных с возможностью осуществления основных арифметических, логических операций и операций ввода/вывода путем выполнения и/или исполнения инструкций. В соответствии с различными вариантами осуществления, схема 1202 обработки может быть сконфигурирована для выполнения некоторых или всех вычислений, связанных с подготовкой и/или генерацией виртуальной графики и/или других типов информации, которые должны быть спроецированы HUD-системой 1000 для отображения в режиме реального времени. Кроме того, схема 1202 обработки выполнена с возможностью сбора информации от схемы 1221 датчиков (например, обработки видеопотока от системы камер или устройств захвата изображения), получения пользовательского ввода от одного или нескольких устройств 1286 ввода-вывода и получения ввода 950 транспортного средства по существу в режиме реального времени. Некоторые или все входные сигналы могут приниматься и/или передаваться через схему 1209 связи. Для выполнения вышеупомянутых функций схема 1202 обработки может выполнять команды 1280, и/или в нее может быть загружен соответствующий поток битов или логических блоков для генерации виртуальной графики, основанной, по меньшей мере частично, на любом количестве параметров, включая, например, ввод от схемы 1221 датчиков, ввод от устройств ввода-вывода 1286, ввод от приводных механизмов 1222, ввод от ECU 1224, ввод от схемы 1245 позиционирования и/или подобного. Дополнительно, схема 1202 обработки может быть выполнена с возможностью приема аудио или для вывода аудио через аудиоустройство 1221. Например, схема 1202 обработки может быть выполнена с возможностью предоставления сигналов/команд устройству 1286 вывода звука для предоставления звуковых инструкций, сопровождающих отображаемую навигационную информацию о маршруте, или для предоставления звуковых предупреждений.
Схема 1202 обработки включает в себя, помимо прочего, такие схемы, как одно или несколько процессорных ядер и один или несколько модулей кэш-памяти, регуляторы напряжения с низким уровнем отсева (LDOs), контроллеры прерываний, последовательные интерфейсы, такие как последовательный периферийный интерфейс (SPI), схема межсоединений (I2C) или универсальная программируемая схема последовательного интерфейса, часы реального времени (RTC), счетчики времени, включая интервальные и сторожевые таймеры, устройства ввода-вывода общего назначения (I/O), контроллеры карт памяти, контроллеры и/или интерфейсы межсоединений (IX), интерфейсы универсальной последовательной шины (USB), интерфейсы процессора мобильной индустрии (MIPI), порты тестового доступа Объединенной группы тестового доступа (JTAG) и тому подобное. Схема 1202 обработки может включать в себя схему встроенной памяти или схему кэш-памяти, которая может включать в себя любую подходящую энергозависимую и/или энергонезависимую память, такую как DRAM, SRAM, EPROM, EEPROM, флэш-память, твердотельную память и/или запоминающее устройство любого другого типа технологии, такое как те, которые обсуждаются в этом документе.
Процессор(ы) схемы 1202 обработки может представлять собой, например, один или несколько прикладных процессоров или центральных процессоров (CPU), один или несколько графических процессоров (GPU), один или несколько процессоров для вычисления с сокращенным набором команд (RISC), один или несколько процессоров типа Acorn RISC Machine (ARM), один или несколько процессоров для вычисления со сложным набором команд (CISC), один или несколько DSP, один или несколько микропроцессоров без межсоединенных каскадов конвейера (MIPS), одно или несколько программируемых логических устройств (PLD) и/или аппаратных ускорителей), таких как программируемые логические матрицы (FPGA), структурированная/программируемая специализированная интегральная схема (ASIC), программируемые SOC (PSoC) и т.д., один или несколько микропроцессоров или контроллеров или любая их подходящая комбинация. В некоторых вариантах осуществления схема 1202 обработки может быть реализована как автономная система/устройство/корпус или как часть существующей системы/устройства/корпуса (например, ECU/ECM, EEMS и т.д.) транспортного средства 1005. В некоторых вариантах осуществления схема 1202 обработки может включать в себя процессор/контроллер специального назначения для работы в соответствии с различными вариантами осуществления, приведенными в этом документе.
Отдельные процессоры (или отдельные процессорные ядра) схемы 1202 обработки могут быть соединены с памятью/хранилищем или могут включать в себя память/хранилище и могут быть сконфигурированы для выполнения инструкций, сохраненных в памяти/хранилище, чтобы позволить различным приложениям или операционным системам запускаться в системе 1200. В этих вариантах осуществления один или несколько процессоров (или ядер) схемы 1202 обработки могут соответствовать процессору 312 на фиг.11 и могут быть сконфигурированы для управления прикладным программным обеспечением (например, HUD-приложением) для предоставления конкретных услуг пользователю системы 1200. В некоторых вариантах осуществления один или несколько процессоров (или ядер) схемы 1202 обработки, таких как один или несколько графических процессоров или ядер GPU, могут соответствовать HUD-процессору 1110 и могут быть сконфигурированы для генерации и рендеринга графики, как обсуждалось ранее.
В качестве примеров, схема 1202 обработки может включать в себя процессор на основе архитектуры Intel® Core™, такой как Quark™, Atom™, i3, i5, i7 или процессор класса MCU, процессор(ы) Pentium®, процессор(ы) Xeon® или другой такой процессор, доступный от корпорации Intel®, Санта-Клара, Калифорния. Однако может быть использовано любое количество других процессоров, таких как один или несколько процессоров с архитектурой ядра Advanced Micro Devices (AMD) Zen® Core, таких как процессор(ы) Ryzen® или EPYC®, ускоренные процессоры (APU), MxGPU, процессор(ы) Epyc® или тому подобное; процессор(ы) A5-A12 и/или S1-S4 от Apple® Inc., процессор(ы) Snapdragon™ или Centriq™ от Qualcomm® Technologies, Inc., Texas Instruments, Inc.®, процессор(ы) платформы открытых мультимедийных приложений (OMAP)™; конструкция на основе MIPS от MIPS Technologies, Inc., такая как процессоры MIPS Warrior M-class, Warrior I-class и Warrior P-class; конструкция на базе ARM, лицензированная компанией ARM Holdings, Ltd., такая как процессоры семейства ARM Cortex-A, Cortex-R и Cortex-M; ThunderX2®, от Cavium™, Inc.; и т.п. Другие примеры схемы 1202 обработки упомянуты в другом месте настоящего раскрытия.
В некоторых реализациях схема 1202 обработки может включать в себя концентратор датчиков, который выступает в качестве сопроцессора путем обработки данных, полученных от схемы 1221 датчиков. Концентратор датчиков может включать в себя схему, выполненную с возможностью интеграции данных, полученных от каждой из схем 1221 датчиков, путем выполнения арифметических, логических операций и операций ввода/вывода. В вариантах осуществления концентратор датчиков может проставлять временную метку на полученных данных датчиков, предоставлять данные датчиков в схему 1202 обработки в ответ на запрос таких данных, буферизовать данные датчиков, непрерывно передавать данные датчиков в схему 1202 обработки, включая независимые потоки для каждой схемы 1221 датчиков, сообщать о данных датчиков на основе предопределенных пороговых значений или условий/триггеров и/или выполнять другие подобные функции обработки данных.
Схема 1204 памяти содержит любое количество запоминающих устройств, предназначенных для обеспечения первичной памяти, из которой схема 1202 обработки непрерывно считывает инструкции 1382, хранящиеся в ней, для выполнения. В некоторых вариантах осуществления схема 1204 памяти включает в себя встроенную память или регистры, связанные со схемой 1202 обработки. В качестве примеров схема 1204 памяти может включать в себя энергозависимую память, такую как оперативная память (RAM), статическая RAM (SRAM), динамическая RAM (DRAM), синхронная DRAM (SDRAM) и т.д. Схема 1204 памяти также может включать в себя энергонезависимую память (NVM), такую как память только для чтения (ROM), высокоскоростную электрически стираемую память (обычно называемую "флэш-памятью") и энергонезависимую оперативную память, такую как память с изменением фазы, резистивную память, такую как магниторезистивная память произвольного доступа (MRAM) и т.д.
В некоторых реализациях схема 1202 обработки и схема 1204 памяти (и/или запоминающее устройство 1208) могут содержать логические блоки или логическую структуру, ячейки памяти, блоки ввода/вывода (I/O) и другие взаимосвязанные ресурсы, которые могут быть запрограммированы для выполнения различных функций вариантов осуществления, обсуждаемых в этом документе. Ячейки памяти могут быть использованы для хранения данных в таблицах поиска (LUT), которые использует схема 1202 обработки для реализации различных логических функций. Ячейки памяти могут включать в себя любую комбинацию различных уровней памяти/запоминающего устройства, включая, помимо прочего, EPROM, EEPROM, флэш-память, SRAM, антиперемычки и т.д. Схема 1204 памяти также может содержать устройства постоянной памяти, которые могут быть временными и/или постоянными запоминающими устройствами любого типа, включая, помимо прочего, энергонезависимую память, оптическое, магнитное и/или твердотельное запоминающее устройство и так далее.
Схема 1208 хранения предназначена для обеспечения (совместно используемыми или соответствующими контроллерами) постоянного хранения информации, такой как данные, приложения, операционные системы и так далее. В качестве примеров, схема 1208 хранения данных может быть реализована в виде жесткого диска (HDD), микро-жесткого диска, твердотельного накопителя (SSDD), флэш-памяти, карт флэш-памяти (например, SD-карт, карт microSD, карт с изображением xD и т.п.), флэш-накопителей USB, резистивную память, память на фазовых переходах, голографическую память или химическую память и тому подобное. В примере схема 1208 хранения может представлять собой или может включать в себя запоминающие устройства, которые используют халькогенидное стекло, флэш-память NAND с несколькими пороговыми уровнями, флэш-память NOR, одноуровневую или многоуровневую память на фазовых переходах (PCM), резистивную память, нанопроводную память, сегнетоэлектрическую транзисторную память с произвольным доступом (FeTRAM), антисегнетоэлектрическую память, магниторезистивную память с произвольным доступом (MRAM), память, включающую в себя мемристорную технологию, оперативную память на фазовых переходах (PRAM), резистивную память, включающую в себя металлическую оксидную основу, кислородную вакансионную основу и проводящую мостовую память с произвольным доступом (CB-RAM), или перенос спинового момента (STT)-MRAM, устройство на основе памяти спинтронного магнитного перехода, устройство на основе магнитного туннельного перехода (MTJ), устройство на основе границы домена (DW) и на основе спин-орбитального перехода (SOT), устройство памяти на основе тиристора или сочетание любого из вышеперечисленных, или другую память. Как показано, схема 1208 хранения включена в систему 1200; однако в других вариантах осуществления схема 1208 хранения может быть реализована в виде одного или нескольких отдельных устройств, которые установлены в транспортном средстве 1005 отдельно от других элементов системы 1200.
Схема 1208 хранения выполнена с возможностью хранения вычислительной логики 1283 (или "модулей 1283") в виде программного обеспечения, микропрограммного обеспечения, микрокода или инструкций аппаратного уровня для реализации способов, описанных в этом документе. Вычислительная логика 1283 может быть использована для хранения рабочих копий и/или постоянных копий программных инструкций для работы различных компонентов системы 1200 (например, драйверов, библиотек, интерфейсов прикладного программирования (API) и т.д.), операционной системы 1200, одного или нескольких приложений и/или для реализации вариантов осуществления, обсуждаемых в этом документе. В соответствии с различными вариантами осуществления, вычислительная логика 1283 может включать в себя одно или несколько HUD-приложений, рассмотренных ранее. Постоянная копия программных инструкций может быть помещена в устройства постоянного хранения схемы 1208 хранения на производстве или во время эксплуатации, например, через дистрибутивный носитель (не показан), через интерфейс связи (например, с дистрибутивного сервера (не показан)) или по воздуху (OTA). Вычислительная логика 1283 может быть сохранена или загружена в схему 1204 памяти в виде команд 1282, к которым затем осуществляют доступ для выполнения схемой 1202 обработки, чтобы выполнять функции, описанные в этом документе. Инструкции 1282 направляют схему 1202 обработки для выполнения определенной последовательности или потока действий, например, как описано в отношении функциональной схемы и блок-схемы операций и функциональных возможностей, изображенных в этом документе. Модули/логика 1283 и/или инструкции 1280 могут быть реализованы с помощью инструкций ассемблера, поддерживаемых схемой 1202 обработки, или языков высокого уровня, которые могут быть скомпилированы в инструкции 1280 для выполнения схемой 1202 обработки.
Компьютерный программный код для выполнения операций настоящего изобретения (например, вычислительная логика 1283, инструкции 1282, 1280 и т.д.) может быть написан на любой комбинации одного или нескольких языков программирования, включая объектно-ориентированный язык программирования, такой как Python, Ruby, Scala, Smalltalk, Java™, C++, C# или тому подобное; процедурные языки программирования, такие как язык программирования "C", язык программирования Go (или "Golang") или тому подобное; язык сценариев, такой как JavaScript, серверный JavaScript (SSJS), PHP, Pearl, Python, Ruby или Ruby on Rails, скрипты ускоренных мобильных страниц (AMPScript), VBScript и/или тому подобное; язык разметки, такой как HTML, XML, wiki-разметка или Викитекст, язык беспроводной разметки (WML) и т.д.; формат/определение обмена данными, такие как Java Script Object Concept (JSON), Apache® MessagePack™ и т.д.; язык таблиц стилей, такой как каскадные таблицы стилей (CSS), расширяемый язык таблиц стилей (XSL) или тому подобное; язык определения интерфейса (IDL), такой как Apache® Thrift, Abstract Syntax Notation One (ASN.1), Google® Protocol Buffers (protobuf) и т.д.; или некоторые другие подходящие языки программирования, включая проприетарные языки программирования и/или средства разработки, или любые другие языки или инструменты, как описано в этом документе. Компьютерный программный код для выполнения операций в соответствии с настоящим изобретением также может быть написан на любой комбинации языков программирования, обсуждаемых в этом документе. Программный код может быть выполнен полностью в системе 1200, частично в системе 1200 как отдельный программный пакет, частично в системе 1200 и частично на удаленном компьютере или полностью на удаленном компьютере. В последнем сценарии удаленный компьютер может быть подключен к системе 1200 через сеть любого типа (например, сеть 1220).
Операционная система системы 1200 управляет компьютерными аппаратными и программными ресурсами и предоставляет общие службы для различных приложений (например, для приложения 110). Операционная система системы 1200 может представлять собой или включать в себя бортовую операционную систему 1120, рассмотренную ранее. Операционная система может включать в себя один или несколько драйверов или API, которые предназначены для управления конкретными устройствами, которые встроены в систему 1200, присоединены к системе 1200 или иным образом связаны с системой 1200 посредством связи. Драйверы могут включать в себя отдельные драйверы, позволяющие другим компонентам системы 1200 взаимодействовать или управлять различными устройствами ввода-вывода, которые могут присутствовать внутри системы 1200 или могут быть подключены к ней. Например, драйверы могут включать в себя драйвер дисплея (или драйвер HUD-системы) для управления и разрешения доступа к HUD-системе 1000, драйвер сенсорного экрана для управления и разрешения доступа к интерфейсу сенсорного экрана системы 1200, драйверы датчиков для получения показаний датчиков схемы 1321 датчиков и управления и разрешения доступа к схеме 1321 датчиков, драйверы приводных механизмов для получения положений приводных механизмов 1322 и/или управления и обеспечения доступа к приводным механизмам 1222, драйверы ECU для получения информации системы управления от одного или нескольких ECU 1224, аудиодрайверы для управления и разрешения доступа к одному или нескольким аудиоустройствам. Операционные системы также могут включать в себя одну или несколько библиотек, драйверов, API, встроенного программного обеспечения, промежуточного программного обеспечения, программного клея и т.д., которые предоставляют программный код и/или программные компоненты для одного или нескольких приложений для получения и использования данных из других приложений, управляемых системой 1200.
В некоторых вариантах осуществления ОС может представлять собой ОС общего назначения, в то время как в других вариантах осуществления ОС специально написана для системы 1200 и адаптирована к ней. Например, ОС может представлять собой Unix или Unix-подобную ОС, такую как Linux, например, от Red Hat Enterprise, Windows 10™ от Microsoft Corp.®, macOS от Apple Inc.®, или тому подобное. В другом примере ОС может представлять собой мобильную ОС, такую как Android® от Google Inc.®, iOS® от Apple Inc.®, Windows 10 Mobile® от Microsoft Corp.®, KaiOS от KaiOS Technologies Inc., или тому подобное. В другом примере ОС может представлять собой встроенную ОС или ОС реального времени (RTOS), такую как Windows Embedded Automotive от Microsoft Corp.®, Windows 10 для IoT® от Microsoft Corp.®, Apache Mynewt от Apache Software Foundation®, микроконтроллерную операционную систему ("MicroC/OS" или "liC.OS") от Micrium®, Inc., FreeRTOS, VxWorks® от Wind River Systems, Inc.®, PikeOS от Sysgo AG®, Android Things® от Google Inc.®, QNX® RTOS от BlackBerry Ltd., или любую другую подходящую встроенную ОС или RTOS, например, из тех, которые обсуждаются в этом документе. В другом примере ОС может представлять собой платформу промежуточного программного обеспечения для робототехники, такую как Robot Operating System (ROS), Robotics Technology (RT) - промежуточное программное обеспечение от Object Management Group®, Yet Another Robot Platform (YARP) и/или подобное.
В вариантах осуществления, в которых схема 1202 обработки и схема 1204 памяти включают в себя аппаратные ускорители в дополнение к процессорным ядрам или в качестве альтернативы им, аппаратные ускорители могут быть предварительно сконфигурированы (например, соответствующими потоками битов, логическими блоками/структурой и т.д.) логикой для выполнения некоторых функций описанных в этом документе вариантов осуществления (вместо использования программных инструкций, выполняемых процессорным ядром (ядрами)).
Компоненты системы 1200 и/или транспортного средства 1005 взаимодействуют друг с другом через межсоединение (IX) 1206. В различных вариантах осуществления IX 1206 представляет собой систему шины локальной сети контроллера (CAN), систему протокола с временным разделением каналов (TTP) или систему FlexRay, которая может позволять различным устройствам (например, ECU 1224, схеме 1221 датчиков, приводным механизмам 1222 и т.д.) взаимодействовать друг с другом с помощью сообщений или кадров. В дополнение или в качестве альтернативы, IX 1206 может включать в себя любое количество других технологий IX, таких как локальная сеть межсоединений (LIN), архитектура промышленного стандарта (ISA), расширенная ISA (EISA), схема межсоединений (I2C), последовательный периферийный интерфейс (SPI), интерфейсы точка-точка, шина управления питанием (PMBus), соединение периферийных компонентов (PCI), PCI express (PCIe), интерфейс Ultra Path (UPI), Accelerator Link (IAL), интерфейс общего прикладного программирования (CAPI), межсоединение QuickPath (QPI), архитектура Omni-Path (OPA) IX, системные межсоединения RapidIO™, Ethernet, Cache Coherent Interconnect для ускорителей (CCIA), консорциум IXs поколения Z, открытый интерфейс процессора когерентного ускорителя (OpenCAPI) и/или любое количество других технологий IX. IX 1306 может представлять собой проприетарную шину, например, используемую в системе на основе SoC.
Схема 1209 связи представляет собой аппаратный элемент или набор аппаратных элементов, используемых для связи по одной или нескольким сетям (например, по сети 101) и/или с другими устройствами. Схема 1209 связи включает в себя модем 1210 и схему приемопередатчика ("TRx") 1212. Модем 1210 включает в себя одно или несколько устройств обработки (например, процессоры основной полосы частот) для выполнения различных функций протокола и радиоуправления. Модем 1210 взаимодействует с прикладной схемой системы 1200 (например, комбинацией схемы 1202 обработки и CRM 1360) для генерации и обработки сигналов основной полосы частот и для управления операциями TRx 1212. Модем 1210 выполняет различные функции радиоуправления, которые обеспечивают связь с одной или несколькими радиосетями через TRx 1212 в соответствии с одним или несколькими протоколами беспроводной связи, такими как те, которые обсуждаются в этом документе. Модем 1210 может включать в себя такую схему, как, помимо прочего, один или несколько одноядерных или многоядерных процессоров (например, один или несколько процессоров основной полосы частот) или управляющую логику для обработки сигналов основной полосы частот, принятых из тракта приема сигналов TRx 1212, и для формирования сигналов основной полосы частот, которые должны быть предоставлены TRx 1212 по каналу передачи сигнала. В различных вариантах осуществления модем 1210 может реализовывать ОС реального времени (RTOS) для управления ресурсами модема 1210, планирования задач и т.д.
Схема 1209 связи также включает в себя TRx 1212 для обеспечения связи с беспроводными сетями с использованием модулированного электромагнитного излучения через нетвердую среду. TRx 1212 включает в себя канал приема сигнала, который содержит схему для преобразования аналоговых радиочастотных сигналов (например, существующий или принятый модулированный волновой сигнал) в цифровые сигналы основной полосы частот, которые должны быть предоставлены модему 1210. TRx 1212 также включает в себя канал передачи сигнала, который содержит схему, выполненную с возможностью преобразования цифровых сигналов основной полосы частот, предоставляемых модемом 1210, для преобразования в аналоговые радиочастотные сигналы (например, модулированный волновой сигнал), которые будут усилены и переданы через антенную решетку, включающую в себя один или несколько антенных элементов (не показаны). Антенная решетка соединена с TRx 1212 с помощью металлических линий передачи или тому подобного. Антенная решетка может представлять собой одну или несколько микрополосковых антенн или печатных антенн, которые изготовлены на поверхности одной или нескольких печатных плат; массив патч-антенн, выполненный в виде участков из металлической фольги различных форм; установленную на стекле антенную решетку или антенны "на стекле"; или какую-либо другую известную антенну или антенные элементы.
TRx 1212 может включать в себя один или несколько радиоприемников, которые совместимы и/или могут работать в соответствии с любой одной или несколькими из следующих технологий и/или стандартов радиосвязи, включая, помимо прочего: технологию радиосвязи глобальной системы мобильной связи (GSM), службу пакетной радиосвязи общего назначения (технология радиосвязи GPRS), улучшенные скорости передачи данных для технологии радиосвязи GSM Evolution (EDGE) и/или технологию радиосвязи 3GPP, такую как универсальная система мобильной связи (UMTS), свобода доступа к мультимедиа (FOMA), множественный доступ с кодовым разделением 2000 (CDM2000), сотовые цифровые пакетные данные (CDPD), Mobitex, данные с коммутацией каналов (CSD), высокоскоростные данные с коммутацией каналов (HSCSD), широкополосный множественный доступ с кодовым разделением UMTS, высокоскоростной пакетный доступ (HSPA), высокоскоростной нисходящий пакетный доступ (HSDPA), высокоскоростной пакетный доступ по восходящей линии связи (HSUPA), высокоскоростной пакетный доступ плюс (HSPA+), UMTS-Дуплекс с временным разделением каналов (UMTS-TDD), множественный доступ с временным разделением с кодовым разделением (TD-CDMA), множественный доступ с временным разделением с синхронным кодовым разделением (TD-CDMA), стандарт "Долгосрочная эволюция" (LTE), LTE-Advanced (LTE-A), LTE Extra, LTE-A Pro, LTE Licensed-Assisted Access (LAA), MulteFire, наземный радиодоступ UMTS (UTRA), усовершенствованный наземный радиодоступ UMTS (E-UTRA), пятое поколение (5G) или новое радио (NR), стандарт 3GPP устройство-устройство (D2D) или "услуги эффекта близости" (ProSe), сотовая связь 3GPP "транспортное средство-со-всеми" (V2X), эволюционировавшая оптимизированная передача данных или эволюционировавшая передача данных (EV-DO), усовершенствованная система мобильной телефонной связи (AMPS), система связи с полным доступом/Extended Total Access Communication System (TACS/ETACS), цифровой AMPS (D-AMPS), Push-to-talk (PTT), система мобильной телефонной связи (MTS), улучшенная система мобильной телефонной связи (IMTS), усовершенствованная система мобильной телефонной связи (AMTS), Offentlig Landmobil Telefoni (OLT), которая является норвежской технологией для наземной мобильной телефонии общего пользования, Mobiltelefonisystem D (MTD), которая является шведской системой мобильной телефонии D, общественная автоматизированная наземная мобильная связь (Autotel /PALM), Autoradiopuhelin (ARP), что по-фински означает "автомобильный радиотелефон", северная мобильная телефония (NMT), Nippon Telegraph and Telephone (NTT), версия NTT с высокой пропускной способностью (Hicap), сотовые цифровые пакетные данные (CDPD), Mobitex, DataTAC, интегрированная цифровая расширенная сеть (iDEN), персональная цифровая сотовая связь (PDC), передача данных с коммутацией каналов (CSD), персональная система Handy-phone (PHS), широкополосная интегрированная цифровая расширенная сеть (WiDEN), iBurst, нелицензионный мобильный доступ (UMA), также называемый универсальной сетью доступа 3GPP (GAN), Bluetooth®, Bluetooth с низким энергопотреблением (BLE), протоколы на основе IEEE 802.15.4 (например, IPv6 по беспроводным персональным сетям с низким энергопотреблением (6LoWPAN), WirelessHART, MiWi, Thread, I600.11a и т.д.) Wi-Fi-direct, ANT/ANT+, ZigBee, Z-Wave, Universal Plug and Play (UPnP), маломощная глобальная сеть (LPWAN), LoRaWAN™ (региональная сеть большого радиуса действия), Sigfox, стандарт Wireless Gigabit Alliance (WiGig), стандарты mmWave в целом (беспроводные системы, работающие на частоте 10-300 ГГц и выше, такие как WiGig, IEEE 802.11ad, IEEE 802.11ay и т.д.), технологии, работающие в диапазонах выше 300 ГГц и ТГц (на основе 3GPP/LTE или IEEE 802.11p и другие), выделенные системы связи малой дальности (DSRC), такие как интеллектуальные транспортные системы и другие, европейская система ITS-G5 (т.е. европейская версия DSRC на базе стандарта IEEE 802.11p, включая ITS-G5A (т.е. работа ITS-G5 в европейских полосах частот ITS, предназначенных для ITS для приложений, связанных с безопасностью, в диапазоне частот от 5875 ГГц до 5905 ГГц), ITS-G5B (т.е. работа в европейских полосах частот ITS, предназначенных для ITS небезопасных приложений в диапазоне частот от 5,855 ГГц до 5,875 ГГц), ITS-G5C (т.е. работа приложений ITS в диапазоне частот от 5,470 ГГц до 5,725 ГГц)) и т.д. В дополнение к вышеупомянутым стандартам, для TRx 1212 может быть использовано любое количество технологий спутниковой восходящей линии связи, включая, например, радиостанции, соответствующие стандартам, выпущенным Международным союзом электросвязи (ITU) или Европейским институтом стандартов электросвязи (ETSI), помимо прочих, как существующих, так и еще не разработанных.
Схема сетевого интерфейса/контроллер (NIC) 1216 может быть включен для обеспечения проводной связи с сетью 101 или с другими устройствами, использующими стандартный протокол сетевого интерфейса. В большинстве случаев NIC 1216 может быть использован для передачи данных по сети (например, сети XA20) через проводное соединение, когда транспортное средство неподвижно (например, в гараже, испытательном центре или подобном). Стандартный протокол сетевого интерфейса может включать в себя Ethernet, Ethernet через туннели GRE, Ethernet через многопротокольную коммутацию меток (MPLS), Ethernet через USB или может быть основан на других типах сетевых протоколов, таких как Controller Area Network (CAN), Local Interconnect Network (LIN), DeviceNet, ControlNet, Data Highway+, PROFIBUS или PROFINET, помимо многих других. Может быть обеспечено сетевое подключение к/от системы 1200 через NIC 1216 с использованием физического соединения, которое может быть электрическим (например, "медное межсоединение") или оптическим. Физическое соединение также включает в себя подходящие входные разъемы (например, порты, разъемы и т.д.) и выходные разъемы (например, штекеры, контакты и т.д.). NIC 1216 может включать в себя один или несколько выделенных процессоров и/или ПЛИС для обмена данными с использованием одного или нескольких из вышеупомянутых протоколов сетевого интерфейса. В некоторых реализациях NIC 1216 может включать в себя несколько контроллеров для обеспечения подключения к другим сетям, использующим те же или другие протоколы. Например, система 1200 может включать в себя первый NIC 1216, обеспечивающий связь с облаком по Ethernet, и второй NIC 1216, обеспечивающий связь с другими устройствами по сети другого типа.
Интерфейс 1218 ввода/вывода (I/O) может быть выполнен с возможностью подключения или сопряжения системы 1200 с внешними устройствами или подсистемами. Внешний интерфейс 1318 может включать в себя любые подходящие интерфейсные контроллеры и разъемы для сопряжения системы 1200 с внешними компонентами/устройствами, такими как внешняя шина расширения (например, универсальная последовательная шина (USB), FireWire, PCIe, Thunderbolt и т.д.), используемая для соединения системы 1200 с внешними компонентами/устройствами, такими как схемы 1221 датчиков, приводные механизмы 1222, электронные блоки управления (ECU) 1224, система 1245 позиционирования, устройство(а) ввода 1286 и блоки 1230 формирования изображения (PGU). В некоторых случаях схема 1218 интерфейса ввода-вывода может быть использована для передачи данных между системой 1200 и другим вычислительным устройством (например, ноутбуком, смартфоном или каким-либо другим пользовательским устройством) через проводное соединение. Схема 1218 интерфейса ввода-вывода может включать в себя любые подходящие контроллеры интерфейса и разъемы для соединения одной или нескольких из следующего: схема 1202 обработки, схема 1204 памяти, схема 1208 хранения, схема 1209 связи и другие компоненты системы 1200. Контроллеры интерфейса могут включать в себя, помимо прочего, контроллеры памяти, контроллеры хранения (например, контроллеры массива независимых дисковых накопителей с избыточностью (RAID), контроллеры управления базовой платой (BMCs), контроллеры ввода/вывода, контроллеры хоста и т.д. Коннекторы могут включать в себя, например, шины (например, IX 1206), порты, слоты, перемычки, соединительные модули, розетки, модульные соединители и т.д. Схема 1218 интерфейса ввода-вывода также может включать в себя интерфейсы периферийных компонентов, включая, помимо прочего, порты энергонезависимой памяти, USB-порты, аудиоразъемы, интерфейсы источника питания, порты бортовой диагностики (OBD) и т.д.
Схема 1321 датчиков включает в себя устройства, модули или подсистемы, которые предназначены для детектирования событий или изменений в окружающей среде и отправки информации (данных датчика) об обнаруженных событиях на какое-либо другое устройство, модуль, подсистему и т.д. Примеры таких датчиков 1221 включают в себя, помимо прочего, блоки измерения инерции (IMU), содержащие акселерометры, гироскопы и/или магнитометры; микроэлектромеханические системы (MEMS) или наноэлектромеханические системы (NEMS), содержащие 3-осевые акселерометры, 3-осевые гироскопы и/или магнитометры; датчики уровня; датчики расхода; датчики температуры (например, термисторы); датчики давления; датчики барометрического давления; гравиметры; высотомеры; устройства захвата изображения (например, камеры); датчики обнаружения света и определения дальности (LiDAR); датчики приближения (например, детектор инфракрасного излучения и т.п.), датчики глубины, датчики внешней освещенности, ультразвуковые приемопередатчики; микрофоны и т.д.
Некоторые из схем 1221 датчиков могут представлять собой датчики, используемые для различных систем управления транспортным средством, и могут включать в себя, помимо прочего, датчики выхлопных газов, включая датчики кислорода в выхлопе для получения данных о кислороде, и датчики абсолютного давления в коллекторе (MAP) для получения данных о давлении в коллекторе; датчики массового расхода воздуха (MAF) для получения данных о расходе всасываемого воздуха; датчики температуры всасываемого воздуха (IAT) для получения данных IAT; датчики температуры окружающего воздуха (AAT) для получения данных AAT; датчики давления окружающего воздуха (AAP) для получения данных AAP; датчики каталитического нейтрализатора, включая температуру каталитического нейтрализатора (CCT) для получения данных CCT и датчики кислорода в каталитическом нейтрализаторе (CCO) для получения данных CCO; датчики скорости транспортного средства (VSS) для получения данных VSS; датчики рециркуляции выхлопных газов (EGR), включая датчики давления EGR для получения данных о давлении ERG и датчики положения EGR для получения данных о положении/ориентации игольчатого клапана EGR; датчик положения дроссельной заслонки (TPS) для получения данных о положении/ориентации/угле дроссельной заслонки; датчики положения кривошипа/кулачка для получения данных о положении/ориентации/угле кривошипа/кулачка/поршня; датчики температуры охлаждающей жидкости; и/или другие подобные датчики, встроенные в транспортные средства 1005. Схема 1221 датчиков может включать в себя другие датчики, такие как датчик положения педали акселератора (APP), акселерометры, магнитометры, датчики уровня, датчики расхода/текучей среды, датчики барометрического давления и тому подобное.
Схема 1245 позиционирования включает в себя схему для приема и декодирования сигналов, передаваемых/транслируемых сетью позиционирования глобальной навигационной спутниковой системы (GNSS). Примеры группировок навигационных спутников (или GNSS) включают в себя глобальную систему позиционирования США (GPS), глобальную навигационную систему России (ГЛОНАСС), систему Galileo Европейского Союза, китайскую навигационную спутниковую систему BeiDou, региональную навигационную систему или систему расширения GNSS (например, навигация с индийской спутниковой группировкой (NAVIC), японская квазизенитная спутниковая система (QZSS), французская система доплеровской орбитографии и радиопозиционирования, интегрированная со спутником (DORIS), и т.д.), или тому подобное. Схема 1245 позиционирования содержит различные аппаратные элементы (например, включая аппаратные устройства, такие как переключатели, фильтры, усилители, антенные элементы и т.п. для облегчения OTA-связи) для связи с компонентами сети позиционирования, такими как узлы группировки навигационных спутников. В некоторых вариантах осуществления схема 1245 позиционирования может включать в себя интегральную схему Микротехнологии для позиционирования, навигации и синхронизации (Micro-PNT), которая использует главный тактовый сигнал синхронизации для выполнения отслеживания/оценки местоположения без помощи GNSS. Схема 1245 позиционирования также может быть частью схемы 1209 связи или взаимодействовать с ней для осуществления связи с узлами и компонентами сети позиционирования. Схема 1245 позиционирования также может предоставлять данные о местоположении и/или временные данные прикладной схеме, которая может использовать эти данные для синхронизации операций с различной инфраструктурой (например, базовыми станциями радиосвязи), для пошаговой навигации или тому подобного. В дополнение или в качестве альтернативы, схема 1245 позиционирования может быть встроена в схему связи или работать совместно с ней для определения положения или локации транспортного средства 1005 посредством, например, реализации протокола позиционирования LTE (LPP), системы позиционирования Wi-Fi (WiPS или WPS), триангуляции, вычисления силы сигнала и/или какого-либо другого подходящего способа локализации.
В некоторых вариантах осуществления схема 1221 датчиков может быть использована для подтверждения и/или уточнения информации, предоставляемой схемой 1245 позиционирования. В первом примере входные данные с камеры 1221 могут быть использованы схемой 1202 обработки (или HUD-приложением, управляемым схемой 1202 обработки) для измерения относительного перемещения объекта/изображения и для вычисления скорости движения транспортного средства и скорости поворота для калибровки или повышения точности датчика 1221/1245 положения. Во втором примере входные данные от барометра могут быть использованы совместно со схемой 1245 позиционирования (или HUD-приложением, управляемым схемой 1202 обработки) для более точного определения относительной высоты транспортного средства 1005 и определения положения транспортного средства 1005 относительно отображенной системы координат. В третьем примере изображения или видео, захваченные камерой 1221 или апертурным устройством 1221 для получения изображения, могут быть использованы совместно со схемой 1245 позиционирования (или HUD-приложением, управляемым схемой 1202 обработки) для более точного определения относительного расстояния между транспортным средством 1005 и конкретным объектом или ориентиром, связанным с системой координат, таким как поворот или пункт назначения. В четвертом примере входные данные от инерциального датчика 1221 могут быть использованы схемой 1202 обработки (или HUD-приложением, управляемым схемой 1202 обработки) для вычисления и/или определения скорости транспортного средства, скорости поворота и/или положения транспортного средства XA00. В четвертом примере схема 1202 обработки (или HUD-приложение, управляемое схемой 1202 обработки) может быть выполнена с возможностью определения местоположения и/или идентификации оператора транспортного средства с помощью устройства/системы распознавания пользователя, которое может содержать камеру 1221 или устройство 1221 слежения, выполненного с возможностью идентификации оператора и/или определения относительного положения оператора и/или высоты относительно устройства отображения (например, HOE 1231, обсуждаемый ниже). На основе информации, полученной из пользовательского ввода и/или устройства/системы распознавания пользователя, схема 1202 обработки (или HUD-приложение, управляемое схемой 1202 обработки) может быть выполнено с возможностью инициализации, настройки, подстройки, калибровки или иного изменения функциональности системы 1200 для приспособления к конкретному пользователю.
Отдельные ECU 1224 могут представлять собой встроенные системы или другие подобные вычислительные устройства, которые управляют соответствующей системой транспортного средства 1005. В вариантах осуществления каждый отдельный ECU 1224 может иметь те же или аналогичные компоненты, что и система 1200, такие как микроконтроллер или другое подобное устройство обработки, запоминающее устройство (устройства), интерфейсы связи и тому подобное. В вариантах осуществления ECU 1224 может включать в себя, помимо прочего, блок управления трансмиссией (DCU), блок управления двигателем (ECU), модуль управления двигателем (ECM), EEMS, модуль управления силовой передачи (PCM), модуль управления трансмиссией (TCM), модуль управления тормозом (BCM), включающий в себя модуль антиблокировочной тормозной системы (ABS) и/или электронную систему контроля устойчивости (ESC), центральный модуль управления (CCM), центральный модуль синхронизации (CTM), общий электронный модуль (GEM), модуль управления кузовом (BCM), модуль управления подвеской (SCM), блок управления дверьми (DCU), блок управления скоростью (SCU), блок человеко-машинного интерфейса (HMI), телематический блок управления (TTU), система управления батареей (которая может быть такой же или аналогичной монитору 1226 аккумуляторной батареи) и/или любой другой объект или узел в системе транспортного средства. В некоторых вариантах осуществления ECU 1224 и/или система 1200 могут быть частью или могут быть включены в портативные системы измерения выбросов (PEMS).
Приводы 1222 представляют собой устройства, которые позволяют системе 1200 изменять состояние, положение, ориентацию, перемещать и/или управлять механизмом или системой в транспортном средстве 1005. Приводы 1222 содержат электрические и/или механические устройства для перемещения или управления механизмом или системой и преобразуют энергию (например, электрический ток или движущийся воздух и/или жидкость) в некоторый вид движения. Приводы 1222 могут включать в себя одно или несколько электронных (или электрохимических) устройств, таких как пьезоэлектрические биоморфы, твердотельные приводы, твердотельные реле (SSR), приводы на основе сплавов с памятью формы, приводы на основе электроактивных полимеров, интегральные схемы управления реле (ICS) и/или тому подобное. Приводы 1222 могут включать в себя одно или несколько электромеханических устройств, таких как пневматические приводы, гидравлические приводы, электромеханические переключатели, включая электромеханические реле (EMR), двигатели (например, линейные двигатели, двигатели постоянного тока, бесщеточные двигатели, шаговые двигатели, сервомеханизмы, ультразвуковой пьезодвигатель с опциональной обратной связью по положению, двигатели винтового типа и т.д.), механические шестерни, магнитные переключатели, приводы клапанов, топливные форсунки, катушки зажигания, колеса, ускоритель, пропеллеры, клешни, зажимы, крюки, генератор слышимого звука и/или другие подобные электромеханические компоненты. В качестве примеров, устройство перемещения или двигатель 1180, рассмотренные ранее, могут входить в число одного или нескольких приводов 1222. Система 1200 может быть выполнена с возможностью приведения в действие одного или нескольких приводов 1222 на основе одного или нескольких зафиксированных событий и/или инструкций или управляющих сигналов, полученных от различных ECU 1224 или системы 1200. В вариантах осуществления система 1200 может передавать команды различным приводам 1222 (или контроллерам, которые управляют одним или несколькими приводами 1222) для перенастройки электрической сети, как обсуждается в этом документе.
В вариантах осуществления система 1200 и/или ECU 1224 выполнены с возможностью управления одним или несколькими приводами 1222 путем передачи/пересылки команд или управляющих сигналов одному или нескольким приводам 1222 на основе обнаруженных событий. Отдельные ECU 1224 могут быть способны считывать или иным образом получать данные датчиков из схемы 1221 датчиков, обрабатывать данные датчиков для формирования данных системы управления и предоставлять данные системы управления системе 1200 для обработки. Информация системы управления может представлять собой рассмотренную ранее информацию некоторого типа о состоянии. Например, ECU 1224 может предоставлять число оборотов двигателя в минуту (об/мин) для двигателя транспортного средства 1005, данные о времени включения топливной форсунки одного или нескольких цилиндров и/или одной или нескольких форсунок двигателя, данные о времени зажигания искры одного или нескольких цилиндров (например, указание возникновения искры относительно угла поворота коленчатого вала одного или нескольких цилиндров), данные о передаточном числе трансмиссии и/или данные о состоянии трансмиссии (которые могут быть переданы в ECU 1224 от TCU), рассчитанные значения нагрузки двигателя в реальном времени из ECM и т.д.; TCU может предоставлять данные о передаточном числе передачи, данные о состоянии трансмиссии и т.д.; и тому подобное.
Устройства 1386 ввода-вывода могут присутствовать внутри системы 1200 или могут быть подключены к ней. Устройства 1286 ввода-вывода включают в себя устройства ввода и устройства вывода, включающие в себя один или несколько пользовательских интерфейсов, предназначенных для обеспечения взаимодействия пользователя с системой 1200 и/или взаимодействия периферийных компонентов с системой 1200 через интерфейсы периферийных компонентов. Устройства ввода включают в себя любые физические или виртуальные средства для приема ввода, включая, помимо прочего, одну или несколько физических или виртуальных кнопок (например, кнопку сброса), физическую клавиатуру, кнопочную панель, мышь, тачпад, сенсорный экран, микрофоны, сканер, гарнитуру и/или подобное. Следует отметить, что пользовательский ввод может содержать голосовые команды, ввод управления (например, с помощью кнопок, ручек, переключателей и т.д.), интерфейс со смартфоном или любую их комбинацию.
Устройства вывода используют для отображения или передачи информации, такой как показания датчиков, положение привода или другая подобная информация. Данные и/или графика могут быть отображены на одном или нескольких компонентах пользовательского интерфейса устройств вывода. Устройства вывода могут включать в себя любое количество и/или комбинации аудио- или визуального отображения, включая, помимо прочего, один или несколько простых визуальных выходов/индикаторов (например, двоичные индикаторы состояния (например, светоизлучающие диоды (LED)) и многосимвольные визуальные выходы, или более сложные выходы, такие как устройства отображения или сенсорные экраны (например, жидкокристаллические дисплеи (LCD), светодиодные дисплеи, дисплеи с квантовыми точками, проекторы и т.д.), с выводом символов, графики, мультимедийных объектов и т.п., генерируемых или производимых в результате работы системы 1200. Устройства вывода также могут включать в себя динамики или другие устройства, излучающие звук, принтер(ы) и/или подобное. В некоторых вариантах осуществления устройства вывода включают в себя HUD-систему 1000 в дополнение к вышеупомянутым устройствам вывода. В некоторых вариантах осуществления схема 1221 датчиков может быть использована в качестве устройства ввода (например, устройства захвата изображения, устройства захвата движения и т.п.), а один или несколько приводов 1222 могут быть использованы в качестве устройства вывода (например, привод для обеспечения тактильной обратной связи и т.п.). В другом примере схема связи ближнего действия (NFC), содержащая контроллер NFC, соединенный с антенным элементом и устройством обработки, может быть включена в качестве устройства ввода для считывания электронных меток и/или соединения с другим устройством с поддержкой NFC.
Как упоминалось ранее, HUD-система 1000 также включена в транспортное средство 1005. В этом примере HUD-система 1000 содержит один или несколько PGU 1230, один или несколько оптических элементов (например, линз, фильтров, разделителей луча, дифракционных решеток и т.д.) и один или несколько объединяющих элементов (или "объединителей"). Оптические элементы, которые используют для получения голографических изображений, могут быть названы голографическими оптическими элементами (HOE) 1231.
Каждый из PGU 1230 включает в себя проекционный блок (или "проектор") и вычислительное устройство. Проектор может представлять собой проекционное устройство 1130, рассмотренное ранее. Вычислительное устройство содержит один или несколько электронных элементов, которые создают/генерируют цифровой контент для отображения проекционным блоком. Вычислительным устройством может быть схема 1202 обработки, HUD-процессор 1110 или аналогичное устройство обработки, как обсуждалось ранее. Цифровой контент (например, текст, изображения, видео и т.д.) может представлять собой контент любого типа, сохраненный схемой 1208 хранения, передаваемый потоком от серверной системы XA30 и/или удаленных устройств через схему 1209 связи и/или основанный на выводах от различных датчиков 1220, ECU 1224 и/или приводов 1222. Отображаемый контент может включать в себя, например, сообщения о безопасности (например, предупреждения о столкновении, аварийные предупреждения, предупреждения перед аварией, предупреждения о дорожном движении и т.п.), сообщения службы коротких сообщений (SMS)/службы мультимедийных сообщений (MMS), информацию навигационной системы (например, карты, стрелки указателя поворота), фильмы, телешоу, изображения видеоигр и тому подобное.
Проекционный блок (или "проектор") представляет собой устройство или систему, которая проецирует неподвижные или движущиеся изображения на поверхность (поверхности) HOE 1231 через одну или несколько отражающих поверхностей (например, зеркал) на основе сигналов, принятых от вычислительного устройства. Проекционный блок может включать в себя генератор света (или источник света) для генерации света на основе цифрового контента, который фокусируют или (повторно) направляют на один или несколько объектов (например, на поверхность дисплея). Проекционный блок может включать в себя различные электронные элементы (или электронную систему), которые преобразуют цифровой контент или сигналы, полученные от вычислительного устройства, в сигналы для управления источником света для генерации/вывода света различных цветов и интенсивности. В вариантах осуществления проекционный блок представляет собой матрицу 1150 формирования изображения, рассмотренную ранее, или включает в себя эту матрицу. В качестве примеров проектор каждого PGU может представлять собой проектор на светоизлучающих диодах (LED), проектор на лазерных диодах, проектор с жидкокристаллическим дисплеем (LCD), проектор с цифровой обработкой света (DLP), цифровое микрозеркальное устройство (DMD), микроэлектромеханический (MEMS) лазерный сканер, матрицу/проектор жидких кристаллов на кремнии (LCoS) и/или любое другое подобное проекционное устройство, включая те, которые обсуждаются в другом месте настоящего документа.
В некоторых реализациях проекционный блок может включать в себя коллиматор (например, одну или несколько линз, диафрагм и т.д.) для преобразования расходящегося света от источника света в параллельный луч. В некоторых реализациях проектор может включать в себя объединитель (также называемый "объединяющей оптикой" или подобным), который может объединять различные световые пути в один световой путь для определения палитры цветов. В некоторых вариантах осуществления проекционный блок может содержать сканирующие зеркала, которые копируют изображение попиксельно и затем проецируют изображение для отображения.
В некоторых вариантах осуществления HUD-система 1000 или PGU 1230 могут содержать узел оборачивающей линзы и элемент объединения (который может отличаться от объединителя, используемого для отображения проецируемого изображения). Узел оборачивающей линзы может содержать одну или несколько оборачивающих линз, которые преобразуют изображения с проектора в промежуточное изображение, которое затем поступает на HOE 1231 (например, объединяющий элемент) через отражатель.
Генерируемый свет может быть объединен или может перекрываться с внешним (например, естественным) светом, который также (повторно) направляют на тот же HOE 1231. HOE 1231, который объединяет генерируемый свет с внешним светом, может быть назван "объединяющим элементом" или "объединителем". Объединитель может представлять собой светоделитель или полупрозрачную поверхность дисплея, расположенную непосредственно перед зрителем (например, оператором транспортного средства 1005), которая перенаправляет проецируемое изображение с проектора таким образом, чтобы видеть поле зрения и проецируемое изображение одновременно. В дополнение к отражению проецируемого света от проектора, объединяющий элемент также позволяет другим длинам волн света проходить через объединитель. Таким образом, объединяющий элемент (а также другие HOE 1231) смешивает цифровые изображения, выводимые проектором, с просматриваемым реальным миром, чтобы облегчить дополненную реальность.
Объединитель может быть сформирован или изготовлен из одного или нескольких кусков стекла, пластика или другого подобного материала и может иметь покрытие, которое позволяет объединителю отражать проецируемый свет, позволяя внешнему (естественному) свету проходить через объединитель. В вариантах осуществления объединяющий элемент может представлять собой ветровое стекло транспортного средства 1005, отдельную полуотражающую поверхность, установленную на приборной панели транспортного средства 1005, переключаемый проекционный экран, который переключается между высококонтрастным режимом (например, матовым) и прозрачным (например, голографическим) режимом, и т.п. Объединитель может иметь плоскую поверхность или изогнутую поверхность (например, вогнутую или выпуклую), чтобы способствовать фокусировке проецируемого изображения. Один или несколько из HOE 1231 могут представлять собой пропускающие оптические элементы, где переданный луч (опорный луч) попадает на HOE 1231, а дифрагированный луч(и) проходит через HOE 1231. Один или несколько HOE 1231 могут представлять собой отражающие оптические элементы, где переданный луч (опорный луч) попадает на HOE 1231, а преломленный луч(и) отражается от HOE 1231 (например, опорный луч и дифрагированные лучи находятся на одной и той же стороне HOE 1231).
Кроме того, один или несколько HOE 1231 могут использовать методы волноводной голографии для постепенного извлечения коллимированного изображения, направляемого полным внутренним отражением (TIR) в волноводной трубке. Волноводная трубка может представлять собой тонкий лист стекла или пластика, через который отражается генерируемый свет для направления генерируемого света к зрителю/пользователю. В некоторых вариантах осуществления HOE 1231 может использовать голографическую дифракционную решетку (например, дифракционную решетку Брэгга) для подачи генерируемого света в волновод под критическим углом, который проходит через волновод. Свет направляют к пользователю/зрителю с помощью одного или нескольких других HOE 1231, которые используют голографическую дифракционную решетку. Эти HOE 1231 могут содержать рифленые отражательные решетки и/или несколько слоев с переменными показателями преломления (например, содержащих жидкие кристаллы, фоторезистивную подложку и т.д.); рифленые отражательные решетки и/или слои с показателями преломления могут обеспечивать конструктивную и деструктивную интерференцию и дисперсию вейвлетов.
Батарея 1228 может питать систему 1200. В вариантах осуществления батарея 1228 может представлять собой типичную свинцово-кислотную автомобильную батарею, хотя в некоторых вариантах осуществления, например, когда транспортное средство 1005 является гибридным транспортным средством, батарея 1228 может представлять собой литий-ионную батарею, металловоздушную батарею, такую как цинково-воздушная батарея, алюминиево-воздушная батарея, литий-воздушная батарея, литий-полимерная батарея и т.п. Монитор 1226 батареи может быть включен в систему 1200 для отслеживания/мониторинга различных параметров батареи 1228, таких как состояние заряда (SoCh) батареи 1228, состояние работоспособности (SoH) и состояние функционирования (SoF) батареи 1228. Монитор 1226 батареи может включать в себя интегральную схему контроля батареи, которая может передавать информацию о батарее в схему 1202 обработки по интерфейсу 1206.
Хотя это и не показано, в системе 1200 могут присутствовать или могут подключаться к ней различные другие устройства. Например, устройства ввода-вывода, такие как дисплей, сенсорный экран или клавиатура, могут быть подключены к системе 1200 через IX 1206 для приема входных данных и вывода на дисплей. В другом примере схемы GNSS и/или GPS и связанные с ними приложения могут быть включены в систему 1200 или соединены с ней для определения геолокации транспортного средства 1005. В другом примере схема 1205 связи может включать в себя плату универсальной интегральной схемы (UICC), встроенную UICC (eUICC) и/или другие элементы/компоненты, которые могут быть использованы для связи по одной или нескольким беспроводным сетям.
Некоторый неограничивающий пример, приведенный ниже. Следующие примеры относятся к дополнительным вариантам осуществления. Особенности в примерах могут быть использованы где угодно в одном или нескольких вариантах осуществления. Все дополнительные признаки устройства, описанного в этом документе, также могут быть реализованы в отношении способа или процесса.
Пример A01 включает в себя рассеивающее устройство, предназначенное для использования в оптической системе, причем рассеивающее устройство содержит: корпус для размещения по меньшей мере одного взаимодействующего элемента; рама, гибко соединенная с корпусом, причем рама предназначена для удержания рассеивающего элемента; и по меньшей мере один приводной элемент включен в раму или находится на ней. Во время работы, по меньшей мере один приводной элемент приводит в действие взаимодействие между взаимодействующим элементом и приводным элементом для перемещения рассеивающего элемента, удерживаемого в раме или на ней, относительно корпуса, и перемещение рассеивающего элемента уменьшает спеклы, вызванные лазерным излучением, проецируемым на поверхность рассеивающего элемента.
Пример А02 включает в себя рассеивающее устройство из примера А01 и/или некоторых других примеров в этом документе, дополнительно содержащее: по меньшей мере один подвесной элемент, причем по меньшей мере один подвесной элемент предназначен для гибкого соединения рамы с корпусом.
Пример А03 включает в себя рассеивающее устройство из примера А02 и/или некоторых других примеров в этом документе, в котором рама содержит отверстие, выполненное с возможностью размещения в нем одного конца по меньшей мере одного подвесного элемента, а корпус содержит отверстие, выполненное с возможностью размещения в нем другого конца по меньшей мере одного подвесного элемента.
Пример A04 включает в себя рассеивающее устройство из примеров A02-A03 и/или некоторых других примеров, представленных в этом документе, в котором по меньшей мере один подвесной элемент направлен по существу перпендикулярно раме.
Пример A05 включает в себя рассеивающее устройство из примеров A01-A04 и/или некоторых других примеров, описанных в этом документе, в котором по меньшей мере один взаимодействующий элемент содержит один или несколько магнитов.
Пример A06 включает в себя рассеивающее устройство из примера A05 и/или некоторых других примеров, описанных в этом документе, в котором рама или часть рамы представляет собой печатную плату, и по меньшей мере один приводной элемент содержит одну или несколько катушек, сформированных из одной или нескольких дорожек на печатной плате.
Пример A07 включает в себя рассеивающее устройство из примера A06 и/или некоторых других примеров, приведенных в этом документе, в котором расположение одной или нескольких катушек друг относительно друга и относительно взаимодействующего элемента образует линейный приводной механизм.
Пример A08 включает в себя рассеивающее устройство из примеров A06-A07 и/или некоторых других примеров, описанных в этом документе, в которых приведение в действие приводного элемента основано на первом магнитном поле, создаваемом одним или несколькими магнитами, которые отталкивает второе магнитное поле, создаваемое одной или несколькими катушками.
Пример A09 включает в себя рассеивающее устройство из примера A08 и/или некоторых других примеров, описанных в этом документе, в котором электрический ток, подаваемый на одну или несколько катушек, предназначен для создания второго магнитного поля.
Пример А10 включает в себя рассеивающее устройство из примера А09 и/или некоторых других примеров, описанных в этом документе, в котором электрический ток необходимо подавать на одну или несколько катушек с использованием модуляции со смещением фазы, причем смещение фазы в модуляции со смещением фазы согласовано с резонансной частотой рассеивающего устройства.
Пример А11 включает в себя оптическую систему, содержащую: источник света, выполненный с возможностью генерации света, представляющего по меньшей мере одно виртуальное изображение; матрицу формирования изображения, выполненную с возможностью распространения света в виде одного или нескольких волновых фронтов на поверхность дисплея; и узел рассеивателя спеклов, расположенный между источником света и матрицей формирования изображения, причем узел рассеивателя спеклов содержит: корпус, по меньшей мере один взаимодействующий элемент, прикрепленный к корпусу, рассеивающий элемент, прикрепленный к раме, по меньшей мере один подвесной элемент, предназначенный для гибкого соединения рамы с корпусом, и по меньшей мере один приводной элемент, включенный в раму или находящийся на ней, причем во время работы оптической системы: генерируемый свет должен проходить через рассеивающий элемент на матрицу формирования изображения, по меньшей мере один приводной элемент приводит в действие взаимодействие между взаимодействующим элементом и приводным элементом для перемещения рассеивающего элемента, удерживаемого относительно корпуса, и перемещение рассеивающего элемента уменьшает спеклы, вызванные лазерным излучением, проецируемым на поверхность рассеивающего элемента.
Пример А12 включает в себя оптическую систему из примера А11 и/или некоторых других примеров, описанных в этом документе, в которой по меньшей мере один подвесной элемент направлен по существу перпендикулярно раме.
Пример А13 включает в себя оптическую систему из примеров А11-А12 и/или некоторых других примеров, описанных в этом документе, в которых: по меньшей мере один взаимодействующий элемент содержит один или несколько постоянных магнитов или один или несколько ферромагнитных материалов; рама представляет собой печатную плату; и по меньшей мере один приводной элемент содержит одну или несколько катушек, сформированных из одной или нескольких дорожек на печатной плате.
Пример A14 включает в себя рассеивающее устройство из примера A13 и/или некоторых других примеров, описанных в этом документе, в которых приведение в действие приводного элемента основано на первом магнитном поле, создаваемом одним или несколькими постоянными магнитами, которое отталкивает второе магнитное поле, создаваемое одной или несколькими катушками.
Пример А15 включает в себя оптическую систему из примера А14 и/или некоторых других примеров, описанных в этом документе, дополнительно содержащую: контроллер, предназначенный для управления электрическим током, подаваемым на одну или нескольких катушек для создания второго магнитного поля.
Пример А16 включает в себя оптическую систему из примера А15 и/или некоторых других примеров, описанных в этом документе, в которых контроллер предназначен для управления электрическим током, подаваемым на одну или несколько катушек, с использованием модуляции со смещением фазы, при этом смещение фазы в модуляции со смещением фазы согласовано с резонансной частотой рассеивающего устройства.
Пример А17 включает в себя оптическую систему из примеров А11-А16 и/или некоторых других примеров, приведенных в настоящем документе, дополнительно содержащую: оптический элемент, через который необходимо направлять генерируемый свет; и проектор, выполненный с возможностью проецирования лазерного излучения через оптический элемент и рассеивающий элемент на матрицу формирования изображения.
Пример А18 включает в себя оптическую систему из примеров А11-А17 и/или некоторых других примеров, приведенных в этом документе, в которых поверхность дисплея представляет собой лобовое стекло транспортного средства, или поверхность дисплея представляет собой электронный элемент отображения гарнитуры виртуальной реальности.
Пример А19 включает в себя рассеиватель, предназначенный для использования в оптической системе, причем рассеиватель содержит: рассеивающий экран, встроенный в печатную плату (PCB); одну или несколько дорожек, вытравленных на печатной плате, причем каждая дорожка из одной или нескольких дорожек сформирована в одну или несколько катушек, при этом электрический ток, подаваемый на каждую катушку из одной или нескольких катушек, создает магнитное поле; и один или несколько магнитов, обращенных к соответствующей одной или нескольким катушкам, но не соприкасающихся с ними, при этом один или несколько магнитов создают другое магнитное поле, которое должно отталкиваться магнитным полем, создаваемым, когда электрический ток протекает через каждую катушку, и при этом один или несколько магнитов и одна или несколько дорожек расположены относительно друг друга так, чтобы создавать круговое или эллиптическое движение, когда магнитные поля отталкиваются друг от друга.
Пример А20 включает в себя рассеиватель из примера А19 и/или некоторых других примеров, описанных в этом документе, дополнительно содержащий: корпус для удержания одного или нескольких неподвижных элементов; и один или несколько подвесных стержней для соединения корпуса с рамой, причем первый конец каждого подвесного стержня одного или нескольких подвесных стержней вставляют в соответствующее отверстие в печатной плате, а второй конец каждого подвесного стержня вставляют в соответствующее отверстие в корпусе.
Пример А21 включает в себя рассеиватель из примеров А19-А20 и/или некоторых других примеров, описанных в настоящем документе, дополнительно содержащий: один или несколько неподвижных элементов, к которым прикреплены отдельные магниты из одного или нескольких магнитов, и каждый неподвижный элемент из одного или нескольких элементов перекрывает соответствующую дорожку из одной или нескольких дорожек.
Пример А22 включает в себя рассеиватель из любого примера А19-А21 и/или некоторых других примеров, приведенных в этом документе, в котором отдельные подвесные стержни из одного или нескольких подвесных стержней изготовлены из одного или нескольких из следующих материалов: углерод, графит, углеродное волокно, стекловолокно, политетрафторэтилен с керамическим наполнителем (ПТФЭ), алюминий, оксид алюминия, полимид, поливинилхлорид (ПВХ), поликарбонат (ПК), полиимид(ы), акрилонитрилбутадиенстирол (АБС), полиэфирэфиркетон (PEEK), полиарилэфиркетон (PAEK), полидикетоенамин (PDK), оксидный материал, сталь, углеродистая сталь, пружинная сталь или стальной сплав.
Пример А23 включает в себя рассеиватель из примеров 19-22 и/или некоторых других примеров, приведенных в этом документе, в которых один или несколько магнитов представляют собой один или несколько постоянных магнитов, один или несколько ферромагнитных материалов или один или несколько электромагнитов.
Пример А24 включает в себя рассеиватель из примеров А19-А23 и/или некоторых других примеров, приведенных в этом документе, в которых отдельные витки одной или нескольких катушек расположены в виде прямоугольных витков, квадратных витков, круглых витков, эллиптических витков или извилистых витков.
Пример A25 включает в себя рассеиватель из примеров A19-A24 и/или некоторых других примеров, приведенных в этом документе, в котором расположение одной или нескольких катушек друг относительно друга и относительно взаимодействующего элемента образует линейный приводной механизм.
Пример B01 включает в себя рассеивающее устройство, предназначенное для использования в оптической системе, причем рассеивающее устройство содержит: средство размещения для удержания средства взаимодействия; обрамляющее средство, гибко соединенное с корпусом, причем обрамляющее средство предназначено для удержания рассеивающего средства; и приводное действие, включенное в обрамляющее средство или установленное на нем, причем приводное средство предназначено для приведения в действие взаимодействий между средством взаимодействия и приводным средством для перемещения рассеивающего средства относительно корпуса, и перемещение рассеивающего средства предназначено для уменьшения спеклов, вызванных лазерным излучением, проецируемым на поверхность корпуса рассеивающего элемента.
Пример В02 включает в себя рассеивающее устройство из примера В01 и/или некоторых других примеров, приведенных в этом документе, дополнительно содержащее: подвесное средство для гибкого соединения обрамляющего средства со средством размещения.
Пример B03 включает в себя рассеивающее устройство из примеров B02-B03 и/или некоторых других примеров, представленных в этом документе, в котором подвесное средство ориентировано таким образом, чтобы обеспечить перемещение рассеивающего средства.
Пример B04 включает в себя рассеивающее устройство из примеров B01-B03 и/или некоторых других примеров, описанных в этом документе, в котором по меньшей мере одно средство взаимодействия содержит первое средство получения магнитного поля.
Пример В05 включает в себя рассеивающее устройство из примера В04 и/или некоторых других примеров, приведенных в этом документе, в котором приводное средство содержит второе средство получения магнитного поля.
Пример B06 включает в себя рассеивающее устройство из примера B05 и/или некоторых других примеров, приведенных в этом документе, в котором расположение первых средств получения магнитного поля друг относительно друга и относительно второго средства получения магнитного поля предназначено для формирования линейного приводного механизма.
Пример B07 включает в себя рассеивающее устройство из примеров B05-B06 и/или некоторых других примеров, приведенных в этом документе, в которых первое средство получения магнитного поля предназначено для создания первого магнитного поля, а второе средство получения магнитного поля предназначено для создания второго магнитного поля, и движение рассеивающего средства основано на том, что первое магнитное поле отталкивает второе магнитное поле, и/или второе магнитное поле отталкивает первое магнитное поле.
Пример В08 включает в себя рассеивающее устройство из примера В07 и/или некоторых других примеров, приведенных в этом документе, в котором электрический ток, подаваемый на первое и/или второе средство получения магнитного поля, предназначен для создания первого и/или второго магнитного поля, соответственно.
Пример В09 включает в себя рассеивающее устройство из примера В08 и/или некоторых других примеров, приведенных в этом документе, дополнительно содержащее: средство управления для управления подачей электрического тока на первое и/или второе средство получения магнитного поля.
Пример В10 включает в себя рассеивающее устройство из примера В09 и/или некоторых других примеров, приведенных в этом документе, в котором средство управления предназначено для управления подачей электрического тока на первое и/или второе средство получения магнитного поля с использованием модуляции со смещением фазы и/или широтно-импульсной модуляции.
Пример B11 включает в себя рассеивающее устройство из примера B10 и/или некоторых других примеров, описанных в этом документе, в котором смещение фазы в модуляции со смещением фазы согласовано с резонансной частотой рассеивающего устройства.
Терминология. Для целей настоящего документа фраза "A или B" означает (A), (B) или (A и B). Фразы "A/B" и "A или B" означают (A), (B) или (A и B) аналогично фразе "A и/или B." Для целей настоящего раскрытия фраза "по меньшей мере один из A и B" означает (A), (B) или (A и B). В описании могут быть использованы термины "вариант осуществления" или "варианты осуществления", каждый из которых может относиться к одному или нескольким из одних и тех же или различных вариантов осуществления. Кроме того, термины "содержащий", "включающий в себя", "имеющий" и т.п., используемые в отношении одного или нескольких вариантов осуществления, являются синонимами, обычно подразумеваются как "открытые" термины (например, термин "включающий в себя" следует интерпретировать как "включающий в себя, помимо прочего,", термин "имеющий" следует интерпретировать как "имеющий по меньшей мере", термин "включает в себя" следует интерпретировать как "включает в себя, но не ограничивается" и т.д.), и указывают наличие изложенных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличия или добавления одного или нескольких других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп. Термины "содержит", "включающий в себя", "включает в себя" и/или "включающий", фраза "в различных вариантах осуществления", "в некоторых вариантах осуществления" и тому подобное используются неоднократно. Эта фраза обычно не относится к одним и тем же вариантам осуществления; тем не менее, может и относиться. В настоящем раскрытии могут быть использованы фразы "в варианте осуществления", "в вариантах осуществления", "в некоторых вариантах осуществления" и/или "в различных вариантах осуществления", каждая из которых может относиться к одному или нескольким из одних и тех же или различных вариантов осуществления.
В этом документе используют термины "соединенный", "соединенный с возможностью осуществления связи" вместе с их производными. Термин "соединенный" может означать, что два или несколько элементов находятся в прямом физическом или электрическом контакте друг с другом, может означать, что два или несколько элементов косвенно контактируют друг с другом, но все еще действуют совместно или взаимодействуют друг с другом, и/или может означать, что один или несколько других элементов соединены или подсоединены между элементами которые называют связанными друг с другом. Термин "непосредственно соединенный" может означать, что два или несколько элементов находятся в непосредственном контакте друг с другом. Термин "соединенный с возможностью осуществления связи" может означать, что два или несколько элементов могут находиться в контакте друг с другом посредством средства связи, в том числе через провод или другое межсоединение, через беспроводной канал или линию связи и/или тому подобное.
Термин "изготовление" относится к созданию металлической конструкции с использованием средств изготовления. Термин "средство изготовления", используемый в этом документе, относится к любому подходящему инструменту или машине, которые используют в процессе изготовления и могут включать в себя инструменты или машины для резки (например, с использованием ручных или моторных пил, ножниц, долот, фрез, горелок, включая ручные горелки, например кислородно-топливные горелки или плазменные горелки, и/или резцы с числовым программным управлением (ЧПУ), включая лазеры, фрезы, горелки, водяные форсунки, маршрутизаторы и т.д.), гибки (например, ручные, приводные молотки или молотки с ЧПУ, тормоза поддонов, кромкогибочный пресс, трубогибы, валкогибы, специализированные прессы и т.д.), сборки (например, путем сварки, пайки, твёрдой пайки, обжима, соединения клеями, клепки, с использованием крепежных элементов и т.д.), формования или отливки (например, отливка в формы, центробежное литье, литье под давлением, экструзионное формование, матричное формование, методы трехмерной (3D) печати, включая моделирование методом наплавки, селективное лазерное плавление, селективное лазерное спекание, изготовление композитных нитей накала, моделирование путем направления жилы, стереолитография, направленное энергетическое осаждение, изготовление произвольной формы электронным пучком и т.д.), а также технологии изготовления печатных плат и/или полупроводников (например, шелкотрафаретная печать, фотолитография, фотогравировка, фрезерование печатных плат, лазерная резистивная абляция, лазерное травление, плазменное воздействие, осаждение атомного слоя (ALD), осаждение молекулярного слоя (MLD), химическое осаждение из паровой фазы (CVD), быстрая термическая обработка (RTP) и/или подобное).
Термин "крепежная деталь", "средство крепления" или подобное относится к устройству, которое механически соединяет или скрепляет два или несколько объектов друг с другом, и может включать в себя резьбовые крепежные элементы (например, болты, винты, гайки, резьбовые стержни и т.д.), штифты, перемычки, r-образные зажимы, клипсы, колышки, зажимы, дюбели, кулачковые замки, защелки, засовы, стяжки, крючки, магниты, формованные или собранные столярные изделия и/или тому подобное.
Термины "гибкий", "гибкость" и/или "податливость" относятся к способности объекта или материала сгибаться или деформироваться в ответ на приложенную силу; термин "гибкий" дополняет термин "жесткость". Термин "жесткость" и/или "ригидность" относится к способности объекта противостоять деформации в ответ на приложенную силу. Термин "упругость" относится к способности объекта или материала противостоять деформирующему воздействию или напряжению и возвращаться к своему первоначальному размеру и форме после снятия напряжения. Модуль упругости (мера упругости) является свойством материала, тогда как гибкость или жесткость является свойством конструкции или компонента структуры и зависит от различных физических размеров, которые описывают эту конструкцию или компонент.
Термин "износ" относится к явлению постепенного удаления, повреждения и/или смещения материала на твердых поверхностях вследствие механических процессов (например, эрозии) и/или химических процессов (например, коррозии). Износ приводит к разрушению функциональных поверхностей, что в конечном итоге приводит к разрушению материала или потере функциональности. Используемый в этом документе термин "износ" также может включать в себя другие процессы, такие как усталость (например, ослабление материала, вызванное циклической нагрузкой, что приводит к прогрессирующему и локализованному повреждению конструкции и росту трещин) и ползучесть (например, тенденция твердого материала медленно перемещаться или постоянно деформироваться под воздействием постоянных механических напряжений). Механический износ может возникнуть в результате относительного перемещения, возникающего между двумя контактными поверхностями. Износ, возникающий в компонентах оборудования, потенциально может привести к ухудшению функциональной поверхности и, в конечном счете, к потере функциональности. Различные факторы, такие как тип нагрузки, тип движения, температура, смазка и тому подобное, могут влиять на скорость износа.
Термин "схема" относится к схеме или системе из нескольких схем, конфигурируемых для выполнения определенной функции в электронном устройстве. Схема или система схем может быть частью или включать в себя один или несколько аппаратных компонентов, таких как логическая схема, процессор (совместно используемый, выделенный или групповой) и/или память (совместно используемая, выделенная или групповая), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA), программируемое логическое устройство (PLD), система на кристалле (SoC), система в корпусе (SiP), многокристальный корпус (MCP), цифровой сигнальный процессор (DSP) и т.д., которые могут быть настроены для обеспечения описанной функциональности. Кроме того, термин "схема" может также относиться к комбинации из одного или нескольких аппаратных элементов с программным кодом, используемых для выполнения функциональности этого программного кода. Некоторые типы схем могут выполнять одну или несколько программных или встроенных программ для обеспечения по меньшей мере некоторых из описанных функциональных возможностей. Такую комбинацию аппаратных элементов и программного кода можно назвать определенным типом схемы.
Используемый в этом документе термин "элемент" может относиться к единице, которая неделима на данном уровне абстракции и имеет четко определенную границу, где элементом может быть объект любого типа. Термин "сущность" может относиться к (1) отдельному компоненту архитектуры или устройства или (2) к информации, передаваемой в качестве полезной нагрузки. Используемый в этом документе термин "устройство" может относиться к физическому объекту, встроенному или присоединенному к другому физическому объекту поблизости от него, с возможностями передачи цифровой информации от этого физического объекта или к этому физическому объекту. Термин "контроллер" может относиться к элементу или объекту, который обладает способностью влиять на физический объект, например, изменяя его состояние или заставляя физический объект перемещаться.
Термин "вычислительное устройство" может описывать любое физическое аппаратное устройство, способное последовательно и автоматически выполнять последовательность арифметических или логических операций, оборудованное для записи/хранения данных на машиночитаемом носителе и передачи и приема данных от одного или нескольких других устройств в сети связи. Вычислительное устройство можно рассматривать как синоним компьютера, вычислительной платформы, вычислительного устройства и т.д., и в дальнейшем может иногда упоминаться как компьютер, вычислительное устройство и т.д. Термин "компьютерная система" может включать любой тип взаимосвязанных электронных устройств, вычислительных устройств или их компонентов. В дополнение, термин "компьютерная система" и/или "система" может относиться к различным компонентам компьютера, которые связаны друг с другом с возможностью осуществления связи. Кроме того, термин "компьютерная система" и/или "система" может относиться к нескольким вычислительным устройствам и/или нескольким компьютерным системам, которые связаны друг с другом с возможностью осуществления связи и могут быть сконфигурированы для совместного использования вычислительных и/или сетевых ресурсов. Примеры "вычислительных устройств", "компьютерных систем" и т.д. могут включать в себя сотовые телефоны или смартфоны, кнопочные телефоны, планшетные персональные компьютеры, носимые вычислительные устройства, автономные датчики, портативные компьютеры, настольные персональные компьютеры, игровые приставки, цифровые медиаплееры, портативные устройства обмена сообщениями, персональные цифровые ассистенты, устройства для чтения электронных книг, устройства дополненной реальности, серверные компьютерные устройства (например, автономные, монтируемые в стойку, блейд и т.д.), сервисы/системы облачных вычислений, сетевые элементы, автомобильные информационно-развлекательные системы (IVI), мультимедийные развлекательные системы в автомобиле (ICE), приборная панель (IC), система индикации на лобовом стекле (HUD), бортовые диагностические устройства (OBD), мобильное оборудование dashtop (DME), мобильные терминалы передачи данных (MDTs), электронная система управления двигателем (EEMS), электронные блоки управления двигателем (ECU), электронные модули управления двигателем (ECMS), встроенные системы, микроконтроллеры, модули управления, системы управления двигателем (EMS), сетевые или "умные" устройства, устройства связи машинного типа (MTC), устройства "машина-машина" (M2M), устройства интернета вещей (IoT) и/или любые другие подобные электронные устройства. Более того, термин "встроенное в транспортное средство вычислительное устройство" может относиться к любому вычислительному устройству и/или компьютерной системе, физически установленной на транспортном средстве, встроенной в него или иным образом встроенной в транспортное средство.
Используемый в этом документе термин "сетевой элемент" можно считать синонимом и/или упоминать как подключенный к сети компьютер, сетевое оборудование, сетевое оборудование, маршрутизатор, коммутатор, концентратор, мост, контроллер радиосети, сетевое устройство радиодоступа, шлюз, сервер и/или любое другое подобное устройство. Термин "сетевой элемент" может описывать физическое вычислительное устройство проводной или беспроводной сети связи и может быть выполнено с возможностью размещения виртуальной машины. Кроме того, термин "сетевой элемент" может описывать оборудование, которое обеспечивает функции основной полосы частот радиосвязи для передачи данных и/или голосовой связи между сетью и одним или несколькими пользователями. Термин "элемент сети" можно считать синонимом и/или упоминать как "базовая станция". Используемый в этом документе термин "базовая станция" можно считать синонимом и/или упоминать как узел node B, усовершенствованный или эволюционировавший узел node B (eNB), узел node B следующего поколения (gNB), базовая приемопередающая станция (BTS), точка доступа (AP), придорожное устройство (RSU) и т.д., и может описывать оборудование, которое обеспечивает функции основной полосы частот радиосвязи для передачи данных и/или голосовой связи между сетью и одним или несколькими пользователями. Используемые в этом документе термины "транспортное средство-транспортное средство" и "V2V" могут относиться к любой связи, в которой транспортное средство является источником или пунктом назначения сообщения. Кроме того, термины "транспортное средство-транспортное средство" и "V2V", используемые в этом документе, могут также охватывать или быть эквивалентными связи между транспортным средством и инфраструктурой (V2I), связи между транспортным средством и сетью (V2N), связи между транспортным средством и пешеходом (V2P) или связи V2X.
Используемый в этом документе термин "канал" может относиться к любому средству передачи, материальному или нематериальному, которое используют для передачи данных или потока данных. Термин "канал" может быть синонимом и/или эквивалентен "каналу связи", "каналу передачи данных", "каналу передачи", "каналу доступа", "каналу доступа к данным", "линии связи", "линии передачи данных", "несущей", "радиочастотной несущей" и/или любому другому подобному термину, обозначающему путь или среду, через которую передают данные. Кроме того, термин "связь" может относиться к соединению между двумя устройствами посредством технологии радиодоступа (RAT) с целью передачи и приема информации.
Приведенное выше описание одного или нескольких вариантов осуществления обеспечивает иллюстрацию и описание различных примеров осуществления, но не подразумевают, что оно является исчерпывающим или ограничивает объем вариантов осуществления точной раскрытой формой. В свете вышеприведенных идей модификации и вариации возможны или могут быть получены из реализации на практике различных вариантов осуществления. Поскольку конкретные детали изложены для того, чтобы описать примеры осуществления изобретения, специалисту в данной области должно быть очевидно, что изобретение может быть осуществлено на практике без этих конкретных деталей или с их изменением. Таким образом, описание следует рассматривать как иллюстративное, а не ограничивающее.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСШИРЕНИЯ ПУЧКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И СПОСОБ РАСШИРЕНИЯ ПУЧКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ДЛЯ КОГЕРЕНТНОЙ ПОДСВЕТКИ | 2020 |
|
RU2762176C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| СПОСОБ МОДУЛЯЦИИ ФАЗЫ СВЕТА И ОПТИЧЕСКИЙ МОДУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373558C1 |
| ЖИДКОКРИСТАЛЛИЧЕСКИЙ ПРОСТРАНСТВЕННЫЙ МОДУЛЯТОР СВЕТА (ВАРИАНТЫ) | 2007 |
|
RU2340923C1 |
| ФОКАЛЬНАЯ ОБЛАСТЬ ВНИМАНИЯ, ОТОБРАЖАЮЩАЯ ВИРТУАЛИЗИРОВАННЫЙ ТРЕХМЕРНЫЙ ОБЪЕКТ, ПРОЕЦИРУЕМЫЙ СИСТЕМОЙ МНОГОСЛОЙНОГО ОТОБРАЖЕНИЯ | 2015 |
|
RU2659460C1 |
| СВЕТИЛЬНИК | 2012 |
|
RU2605690C2 |
| КАТЕТЕР, СОДЕРЖАЩИЙ ЕМКОСТНЫЕ МИКРОМАШИННЫЕ УЛЬТРАЗВУКОВЫЕ ПРЕОБРАЗОВАТЕЛИ, С РЕГУЛИРУЕМЫМ ФОКУСОМ | 2011 |
|
RU2594429C2 |
| МОДУЛЬ ОБНАРУЖЕНИЯ ФОРМУЛ | 2012 |
|
RU2585972C2 |
| СПОСОБЫ, ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ПРОВЕРКИ ПОДЛИННОСТИ | 2005 |
|
RU2385492C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2627926C1 |


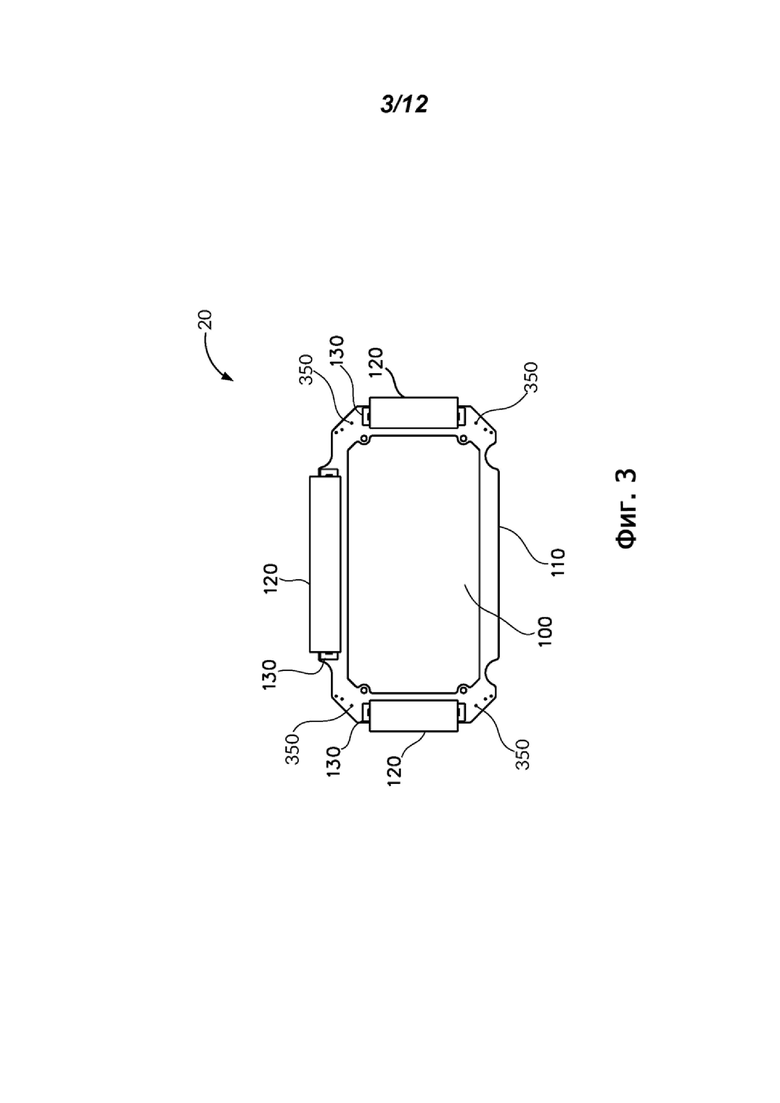

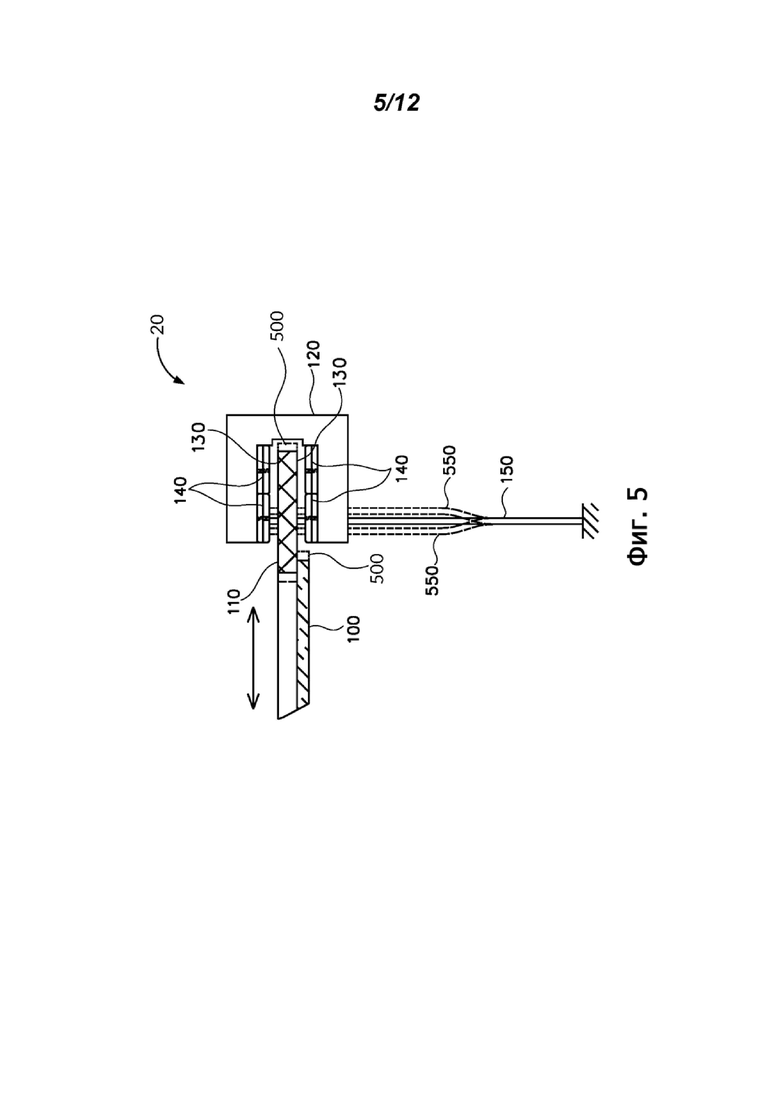
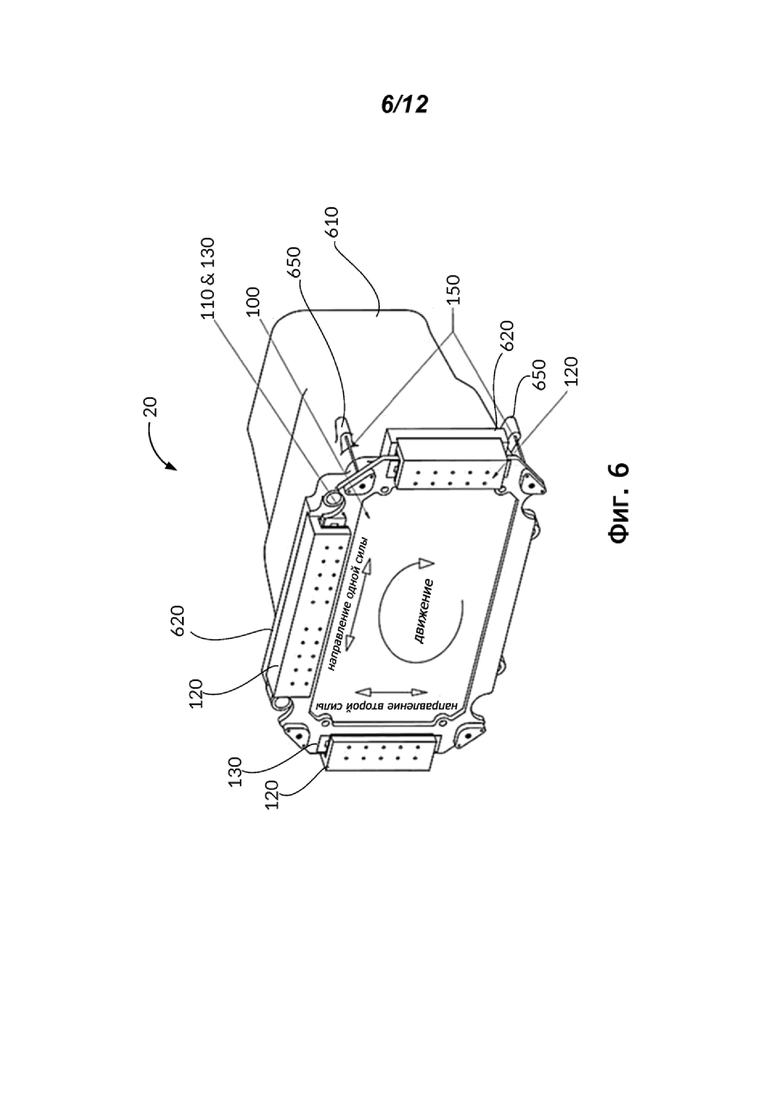
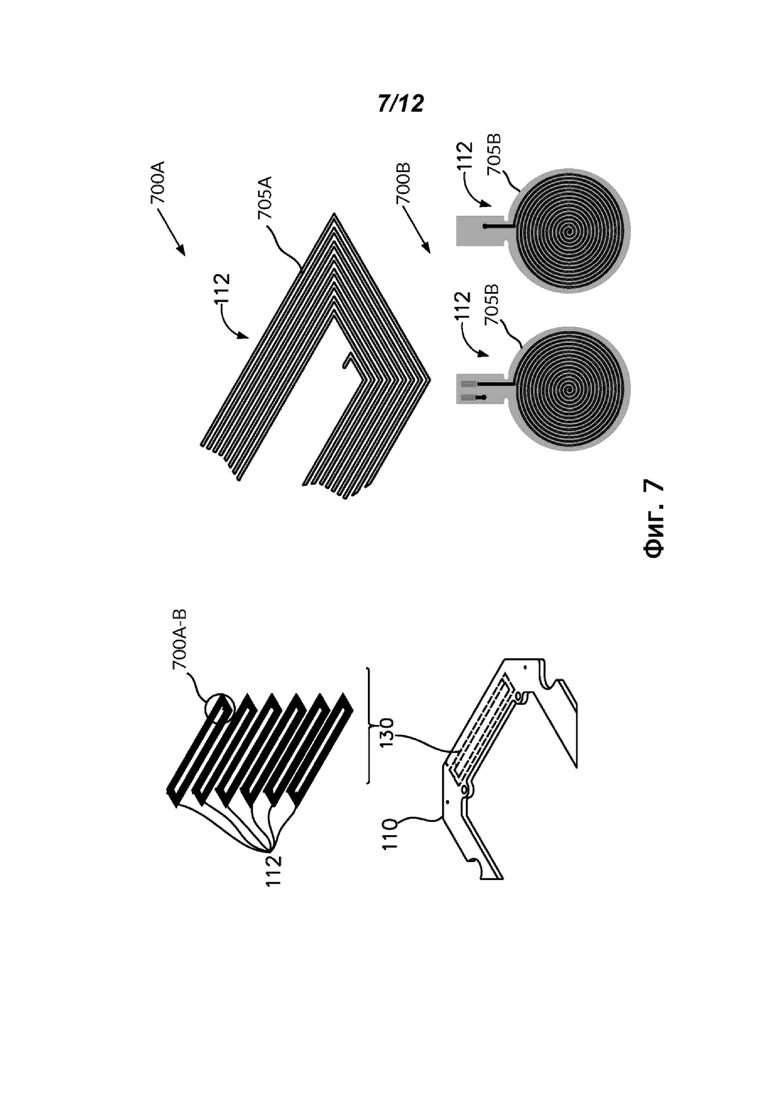

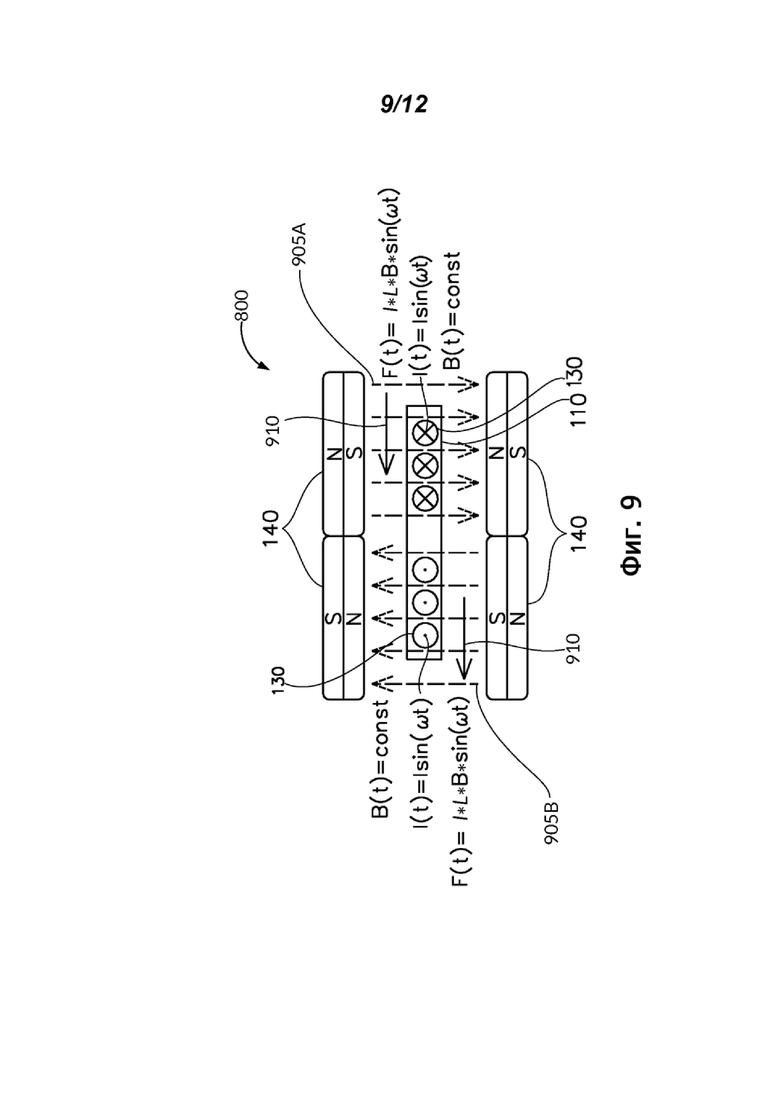
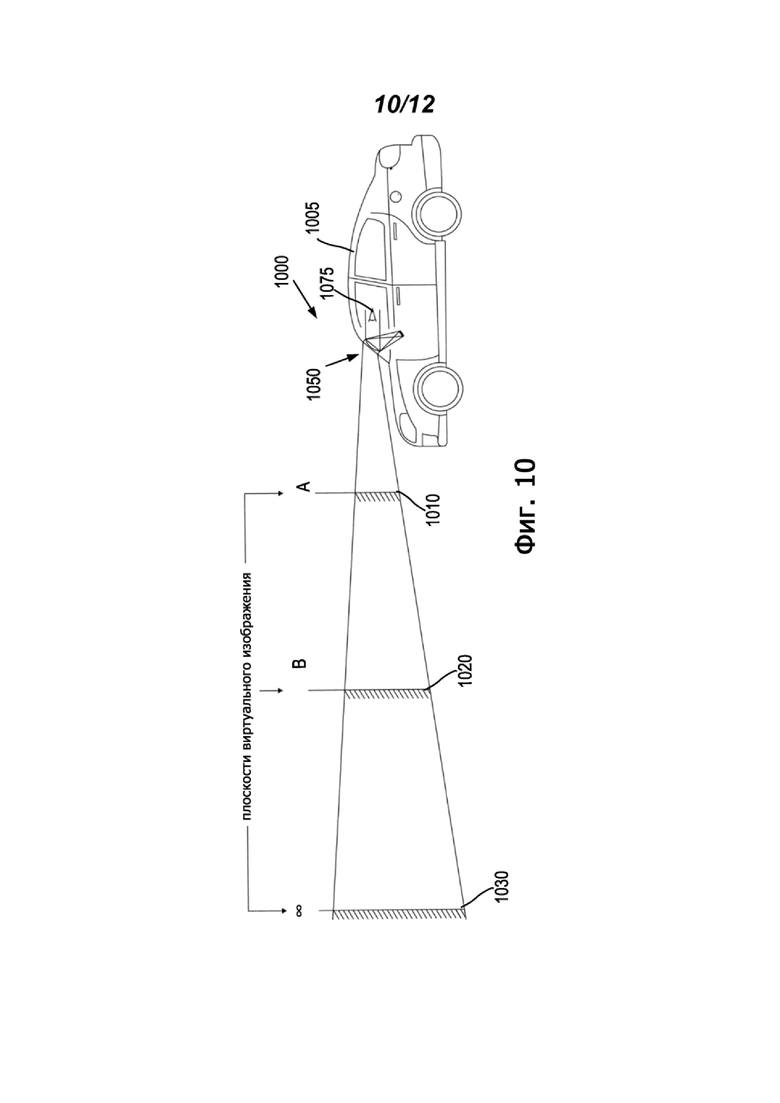
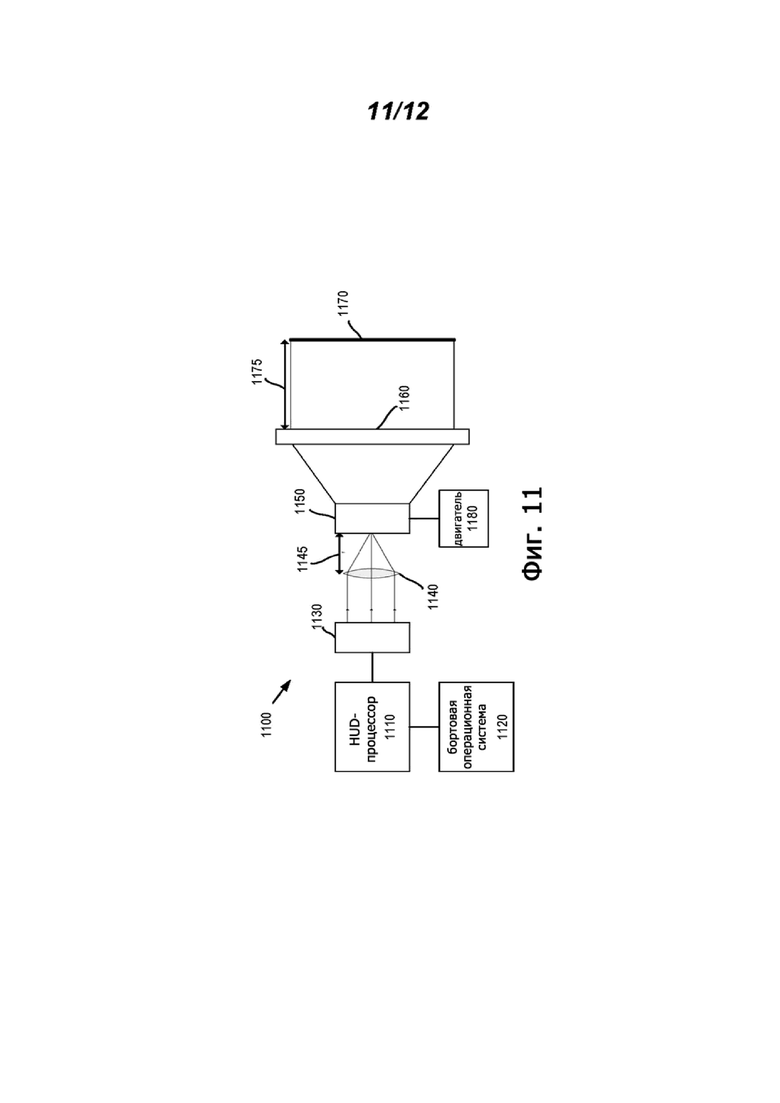
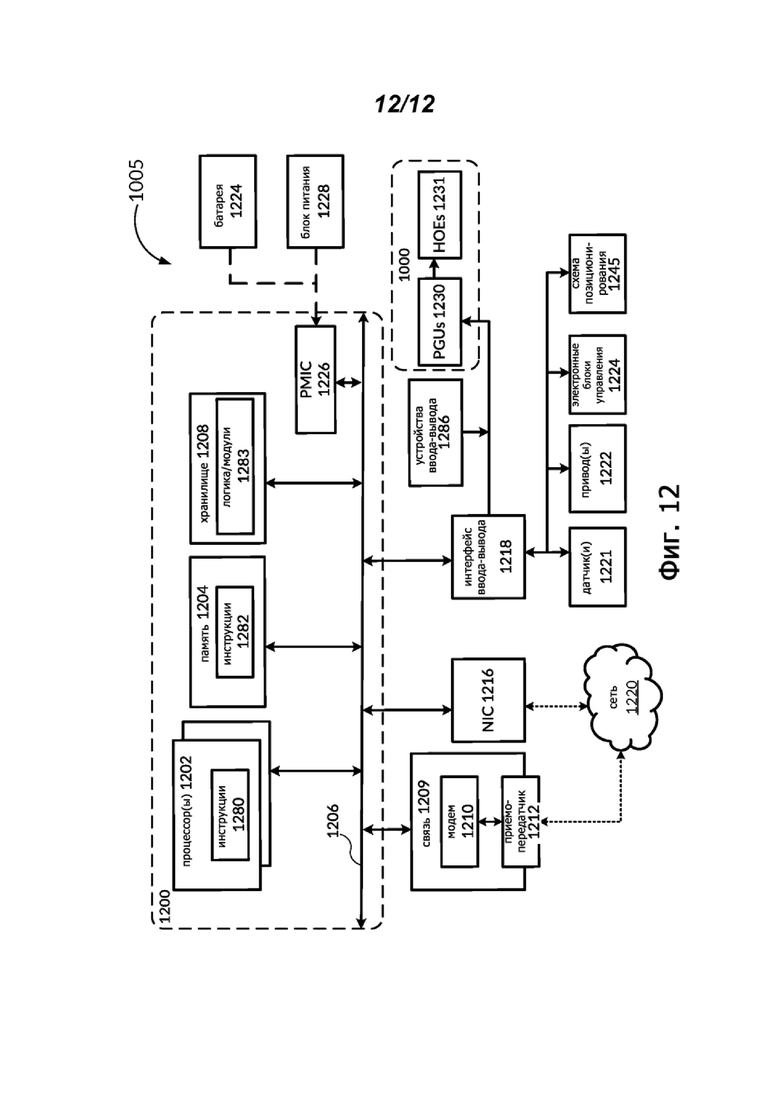
Группа изобретений относится к рассеивающим механизмам для проекционных систем, таких как дисплеи на лобовом стекле, системы виртуальной/дополненной реальности и т.п. Рассеивающее устройство с магнитным приводом включает в себя рассеивающий экран, через который передают излучаемый лазерный свет. Рассеиватель включает в себя подвесные элементы, направленные перпендикулярно рассеивающему экрану, или имеет любую другую ориентацию, которая позволяет или делает возможным перемещение рассеивающего экрана в плоскости рассеивающего экрана. Технический результат – уменьшение спеклов и сглаживание проецируемых изображений с помощью замкнутого кругового или возвратно-поступательного движения рассеивающего экрана в плоскости рассеивающего экрана. 2 н. и 18 з.п. ф-лы, 12 ил.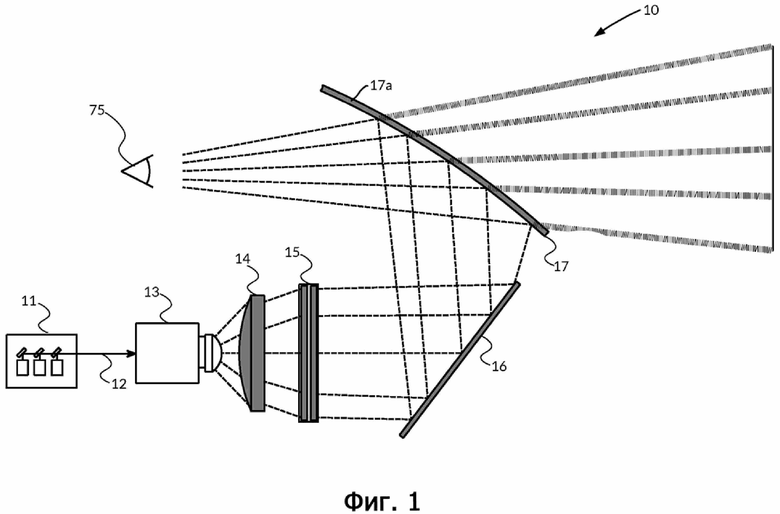
1. Рассеивающее устройство, предназначенное для использования в оптической системе, причем рассеивающее устройство содержит:
корпус, выполненный с возможностью размещения по меньшей мере одного взаимодействующего элемента;
раму, гибко соединенную с корпусом, причем рама выполнена с возможностью удержания рассеивающего элемента;
по меньшей мере один подвесной элемент, причем указанный по меньшей мере один подвесной элемент гибко соединяет раму с корпусом, при этом рама содержит отверстие, выполненное с возможностью размещения в нем одного конца указанного по меньшей мере одного подвесного элемента, а корпус содержит отверстие, выполненное с возможностью размещения в нем другого конца указанного по меньшей мере одного подвесного элемента, и указанный по меньшей мере один подвесной элемент ориентирован по существу перпендикулярно раме; и
по меньшей мере один приводной элемент, включенный в раму или находящийся на раме, причем:
во время работы указанный по меньшей мере один приводной элемент вызывает взаимодействие между взаимодействующим элементом и приводным элементом для перемещения рассеивающего элемента, удерживаемого в раме или на раме, относительно корпуса, и
перемещение рассеивающего элемента уменьшает спеклы, вызванные лазерным излучением, проецируемым на поверхность рассеивающего элемента.
2. Рассеивающее устройство по п.1, в котором указанный по меньшей мере один взаимодействующий элемент содержит один или более магнитов.
3. Рассеивающее устройство по п.2, в котором рама или часть рамы представляет собой печатную плату, и указанный по меньшей мере один приводной элемент содержит одну или более катушек, сформированных из одной или более дорожек на печатной плате.
4. Рассеивающее устройство по п.3, в котором расположение указанной одной или более катушек относительно друг друга и относительно взаимодействующего элемента образует линейный приводной механизм.
5. Рассеивающее устройство по п.3 или 4, в котором приведение в действие приводного элемента основано на первом магнитном поле, создаваемом указанным одним или более магнитами, которое отталкивается вторым магнитным полем, создаваемым указанной одной или более катушками.
6. Рассеивающее устройство по п.5, в котором электрический ток, подаваемый на указанную одну или более катушек, предназначен для создания второго магнитного поля.
7. Рассеивающее устройство по п.6, в котором электрический ток подлежит подаче на указанную одну или более катушек с использованием модуляции со смещением фазы, причем смещение фазы в модуляции со смещением фазы согласовано с резонансной частотой рассеивающего устройства.
8. Рассеивающее устройство по п.1, в котором
рама представляет собой печатную плату, а рассеивающий элемент представляет собой рассеивающий экран;
рассеивающий экран встроен в печатную плату;
приводной элемент представляет собой катушку;
подвесной элемент представляет собой подвесной стержень, и один или более подвесных стержней соединяют корпус с рамой;
первый конец каждого подвесного стержня из указанного одного или более подвесных стержней вставлен в соответствующее отверстие в печатной плате; а
второй конец каждого подвесного стержня вставлен в соответствующее отверстие в корпусе;
на печатной плате вытравлены одна или более дорожек, причем каждая дорожка из указанной одной или более дорожек сформирована в одну или более катушек, при этом электрический ток, подаваемый на каждую катушку из указанной одной или более катушек, создает магнитное поле;
при этом рассеивающее устройство дополнительно содержит
один или более магнитов, обращенных к соответствующим катушкам из указанной одной или более катушек, но не касающихся их, причем указанный один или более магнитов создают другое магнитное поле, подлежащее отталкиванию магнитным полем, создаваемым при протекании тока через каждую катушку;
при этом указанный один или более магнитов и указанная одна или более дорожек расположены относительно друг друга так, чтобы создавать круговое или эллиптическое движение, когда магнитные поля отталкивают друг друга.
9. Рассеивающее устройство по п.8, дополнительно содержащее:
один или более неподвижных элементов, удерживаемые корпусом, к которому прикреплены отдельные магниты из указанного одного или более магнитов, и
каждый неподвижный элемент из указанного одного или более элементов перекрывает соответствующую дорожку из указанной одной или более дорожек.
10. Рассеивающее устройство по п.8 или 9, в котором отдельные подвесные стержни из указанного одного или более подвесных стержней изготовлены из одного или более из углерода, графита, углеродного волокна, стекловолокна, политетрафторэтилена с керамическим наполнителем (ПТФЭ), алюминия, оксида алюминия, полимида, поливинилхлорида (ПВХ), поликарбоната (ПК), полиимида(ов), акрилонитрилбутадиенстирола (АБС), полиэфирэфиркетона (PEEK), полиарилэфиркетона (PAEK), полидикетоенамина (PDK), оксидного материала, стали, углеродистой стали, пружинной стали или стального сплава.
11. Рассеивающее устройство по любому из пп.8-10, в котором указанный один или более магнитов представляют собой один или более постоянных магнитов, один или более ферромагнитных материалов или один или более электромагнитов.
12. Рассеивающее устройство по любому из пп.8-11, в котором отдельные катушки из указанной одной или более катушек расположены в виде прямоугольных катушек, квадратных катушек, круглых катушек, эллиптических катушек или извилистых катушек.
13. Рассеивающее устройство по любому из пп. 8-12, в котором расположение указанной одной или более катушек относительно друг друга и относительно взаимодействующего элемента образует линейный приводной механизм.
14. Оптическая система, содержащая:
источник света, выполненный с возможностью генерирования света, представляющего по меньшей мере одно виртуальное изображение;
матрицу формирования изображения, выполненную с возможностью распространения света в виде одного или более волновых фронтов на поверхность дисплея; и
узел рассеивателя спеклов, расположенный между источником света и матрицей формирования изображения, причем узел рассеивателя спеклов содержит:
корпус,
по меньшей мере один взаимодействующий элемент, прикрепленный к корпусу,
рассеивающий элемент, прикрепленный к раме,
по меньшей мере один подвесной элемент, предназначенный для гибкого соединения рамы с корпусом, при этом рама содержит отверстие, выполненное с возможностью размещения в нем одного конца указанного по меньшей мере одного подвесного элемента, а корпус содержит отверстие, выполненное с возможностью размещения в нем другого конца указанного по меньшей мере одного подвесного элемента, и указанный по меньшей мере один подвесной элемент ориентирован по существу перпендикулярно раме, и
по меньшей мере один приводной элемент, включенный в раму или находящийся на раме,
причем во время работы оптической системы:
генерируемый свет проходит через рассеивающий элемент на матрицу формирования изображения,
указанный по меньшей мере один приводной элемент вызывает взаимодействие между взаимодействующим элементом и приводным элементом для перемещения рассеивающего элемента, удерживаемого относительно корпуса, и
перемещение рассеивающего элемента уменьшает спеклы, вызванные лазерным излучением, проецируемым на поверхность рассеивающего элемента.
15. Оптическая система по п.14, в которой:
указанный по меньшей мере один взаимодействующий элемент содержит один или более постоянных магнитов или один или более ферромагнитных материалов;
рама представляет собой печатную плату; и
указанный по меньшей мере один приводной элемент содержит одну или более катушек, сформированных из одной или более дорожек на печатной плате.
16. Оптическая система по п.15, в которой приведение в действие приводного элемента основано на первом магнитном поле, создаваемом указанным одним или более постоянными магнитами, которое отталкивается вторым магнитным полем, создаваемым указанной одной или более катушками.
17. Оптическая система по п.16, дополнительно содержащая:
контроллер, выполненный с возможностью управления электрическим током, подаваемым на указанную одну или более катушек для создания второго магнитного поля.
18. Оптическая система по п.17, в которой контроллер выполнен с возможностью управления электрическим током, подаваемым на указанную одну или более катушек, с использованием модуляции со смещением фазы, причем смещение фазы в модуляции со смещением фазы согласовано с резонансной частотой рассеивающего устройства.
19. Оптическая система по любому из пп.14-18, дополнительно содержащая:
оптический элемент, через который подлежит направлению генерируемый свет; и
проектор, выполненный с возможностью проецирования лазерного света через оптический элемент и рассеивающий элемент на матрицу формирования изображения.
20. Оптическая система по п.19, в которой поверхность дисплея представляет собой лобовое стекло транспортного средства или поверхность дисплея представляет собой электронный элемент отображения гарнитуры виртуальной реальности.
| EP 2884637 A1, 17.06.2015 | |||
| US 10254559 B2, 09.04.2019 | |||
| US 20140071406 A1, 13.03.2014 | |||
| WO 2017151872 A1, 08.09.2017. |

