Перекрестные ссылки на родственные заявки
Данная заявка основана на и испрашивает приоритет заявки на патент (Китай) номер 2022110430695.7, поданной 21 апреля 2021 года, которая настоящим полностью содержится в данном документе по ссылке.
Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к области технологий пожаротушения на большой высоте, в частности, к пожарной машине.
Описание предшествующего уровня техники
[0002] Число городских высотных зданий в Китае занимает первую строчку рейтинга в мире. Для пожаров в высотных зданиях характерны высокая скорость распространения пожара, трудности эвакуации и трудности при устранении пожара. В случае конструктивных дефектов или недостаточного техобслуживания собственных систем пожаротушения здания, как только пожар вспыхивает в здании и не может тушиться вовремя, либо если возникает пожар на внешнем уровне или в незаконченном здании, зачастую могут произойти катастрофические события. В предшествующем уровне техники, число осей ходовой части крупногабаритных пожарных машин более 80 метров для спасения посредством пожаротушения за счет распыления с подъемника за пределами зданий превышает 5, а длина пожарных машин особо велика, что приводит к плохой маневренности пожарных машин. В настоящее время, во всем мире высота крупногабаритных пожарных машин с подъемником редко превышает 120 метров, и рабочее пространство также ограничивается посредством площадки за пределами горящего здания. Помимо этого, такая крупногабаритная пожарная машина с подъемником является дорогой, затраты на использование и техническое обслуживание являются огромными, а конфигурация городских противопожарных спасательных команд ограничена. Следовательно, спасение при пожарах в высотных зданиях является всемирной проблемой.
[0003] В последние годы, для улучшения скорости реагирования пожаротушения высотных зданий и спасения при пожарах на большой высоте, появляются технологии с применением беспилотных летательных аппаратов для пожаротушения, - их разделяют на следующие четыре типа: (1) беспилотные летательные аппараты, использующиеся для переноски и запуска противопожарных бомб для тушения пожаров в высотных зданиях; (2) беспилотные летательные аппараты использующиеся для переноски и распыления огнегасящего агента тушения пожаров в высотных зданиях; (3) беспилотные летательные аппараты, использующиеся для сброса водяных рукавов с целью обеспечения помощи в тушении пожаров в высотных зданиях городских основных боевых пожарных машин; (4) и беспилотные летательные аппараты, использующиеся для буксировки водяных рукавов для тушения пожаров в высотных зданиях в комбинации с городскими основными боевыми пожарными машинами или наземными перемещаемыми системами приготовления пены.
[0004] Авторы изобретения обнаружили, что, в силу ограничений текущих нагрузочных способностей (грузоподъемности) беспилотных летательных аппаратов, вышеприведенные способы имеют большие недостатки в части эффективности пожаротушения или гибкости в работе или рабочей высоте.
Сущность изобретения
[0005] Варианты осуществления настоящего раскрытия обеспечивают пожарную машину, включающую в себя:
- кузов машины, выполненный с возможностью быть проходимым;
- раму стрелы, размещенную на кузове машины;
- опорную платформу, размещенную в хвостовом конце опоры стрелы;
- беспилотный летательный аппарат, размещенный на опорной платформе;
- переносный трубопровод, размещенный на опоре стрелы; и
- водяной рукав, один конец которого находится в сообщении по текучей среде с переносным трубопроводом, и другой конец которого соединен с возможностью отсоединения с беспилотным летательным аппаратом.
[0006] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- пожарный гидрант, расположенный на опорной платформе; и
- противопожарный трубопровод, находящийся в сообщении по текучей среде с пожарным гидрантом.
[0007] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- первый регулирующий клапан, расположенный на переносном трубопроводе и выполненный с возможностью контроля открыт переносный трубопровод или нет; и
- второй регулирующий клапан, расположенный на противопожарном трубопроводе и выполненный с возможностью контроля открыт противопожарный трубопровод или нет;
- при этом рабочее состояние первого регулирующего клапана и рабочее состояние второго регулирующего клапана являются противоположными.
[0008] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- устройство хранения, размещенное в нижней части опорной платформы, при этом устройство хранения содержит полость для хранения; один конец водяного рукава находится в сообщении по текучей среде с переносным трубопроводом, другой конец водяного рукава находится в сообщении по текучей среде с транспортирующей трубой беспилотного летательного аппарата, и средняя часть водяного рукава сложена и размещена в полости для хранения; при этом нижняя часть устройства хранения выполнена с возможностью быть открываемой и закрываемой.
[0009] В некоторых вариантах осуществления, опора стрелы выполнена с возможностью находится в первом положении и втором положении; при этом в первом положении, пожарный гидрант пожарной машины используется для пожаротушения, а опора стрелы является свободной для изменения амплитуды; во втором положении, опора стрелы остается неподвижной, а беспилотный летательный аппарат используется для пожаротушения.
[0010] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- модуль обработки данных, установленный в опорной платформе или верхнем конце опоры стрелы, при этом беспилотный летательный аппарат включает в себя модуль передачи данных, а модуль обработки данных находится в сообщении с модулем передачи данных беспроводным способом; и
- консоль беспилотного летательного аппарата, также находящуюся в сообщении с модулем обработки данных и выполненную с возможностью управления полетом беспилотного летательного аппарата, транспортируемым количеством огнегасящего агента и/или с возможностью определения следует ли транспортировать огнегасящий агент, либо следует разгрузить огнегасящий агент в трубопровод в соответствии с параметрами состояния беспилотного летательного аппарата, передаваемыми посредством модуля передачи данных и полученными посредством модуля обработки данных, а также в соответствии с предварительно установленными параметрами беспилотного летательного аппарата таким образом, чтобы предотвратить полому беспилотного летательного аппарата вследствие чрезмерной буксировки.
[0011] В некоторых вариантах осуществления, предварительно установленные параметры беспилотного летательного аппарата включают в себя, по меньшей мере, одно из следующего: предварительно определенная нагрузочная способность беспилотного летательного аппарата, предельное значение беспилотного летательного аппарата в отношении скорости окружающего ветра и заданное расстояние, дозволенное беспилотному летательному аппарату от точки взлета.
[0012] В некоторых вариантах осуществления, консоль беспилотного летательного аппарата установлена на кузове машины.
[0013] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
камеру, размещенную на верхнем конце опоры стрелы или опорной платформы, причем камера выполнена с возможностью отслеживания информации о помехах в процессе взлета беспилотного летательного аппарата.
[0014] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- запирающий механизм, установленный на опорной платформе с возможностью закрепления беспилотного летательного аппарата и опорной платформы.
[0015] В некоторых вариантах осуществления, верхний конец переносного трубопровода проходит в опорную платформу, а нижний конец переносного трубопровода расположен в кузове машины.
[0016] В некоторых вариантах осуществления, беспилотный летательный аппарат включает в себя:
- корпус;
- множество вращающихся крыльев, каждое из которых расположено на верхней части кузова; и
- устройство распыления огнегасящего агента, включающее в себя транспортирующую трубу и распыляющую трубу, при этом транспортирующая труба проникает из нижней части корпуса в верхнюю часть корпуса, причем распыляющая труба находится в сообщении по текучей среде с транспортирующей трубой, а распыляющая труба располагается выше положения вращающихся крыльев.
[0017] В некоторых вариантах осуществления, транспортирующая труба включает в себя:
- первый трубопровод, расположенный ниже кузова;
- вторые трубопроводы, расположенные ниже по ходу потока относительно первого трубопровода и находящиеся в сообщении по текучей среде с первым трубопроводом, в котором располагаются, по меньшей мере, два вторых трубопровода, и при этом соответствующие вторые трубопроводы располагаются симметрично относительно центральной оси кузова; и
- третий трубопровод, расположенный ниже по ходу потока относительно соответствующих вторых трубопроводов и находящийся в сообщении по текучей среде с соответствующими вторыми трубопроводами.
[0018] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- два стопорных устройства с электрическим управлением, один из которых расположено на переносном трубопроводе с возможностью блокировки и разблокировки одного конца водяного рукава и переносного трубопровода; при этом другое стопорное устройство с электрическим управлением расположено на другом конце первого трубопровода для блокировки и разблокировки первого трубопровода и верхнего конеца водяного рукава.
[0019] В некоторых вариантах осуществления, пожарная машина дополнительно включает в себя:
- системный узел пожаротушения с помощью сжатой воздушной пены, установленный на кузове машины и находящийся в сообщении по текучей среде с переносным трубопроводом таким образом, чтобы транспортировать огнегасящий агент в переносный трубопровод; причем системный узел пожаротушения с помощью сжатой воздушной пены выполнен с возможностью приготовления пенообразующего огнегасящего агента с заданными параметрами.
[0020] В некоторых вариантах осуществления, заданные параметры включают в себя, по меньшей мере, одно из следующего: время пенообразования, расход пенообразующей жидкой смеси и давление пены.
[0021] Пожарная машина согласно вышеуказанному техническому решению имеет опору стрелы с изменяющейся амплитудой, опорную платформу, беспилотный летательный аппарат, водяной рукав и переносный трубопровод одновременно. Беспилотный летательный аппарат устанавливается на опорной платформе, и опорная платформа приподнимается за счет опоры стрелы таким образом, что беспилотный летательный аппарат имел возможность взлетать с опорной платформы на большой высоте посредством изменения амплитуды без необходимости взлета с земли или около кузова машины. Помимо этого, водяной рукав, буксируемый посредством беспилотного летательного аппарата, также находится в сообщении по текучей среде с переносным трубопроводом, при этом переносный трубопровод находится в сообщении по текучей среде с существующей системой пенного пожаротушения на пожарной машине, а один конец водяного рукава находится в воздушном пространстве вместо нахождения на кузове машины таким образом, что при использовании водяного рукава идентичной длины пожарная машина согласно вариантам осуществления настоящего раскрытия осуществляет высотное пожаротушение для большей высоты. Кроме того, при идентичных требованиях по высоте пожаротушения, длина водяного рукава, буксируемого посредством беспилотного летательного аппарата, меньше, и нагрузка беспилотного летательного аппарата меньше, таким образом, для пожаротушения может использоваться огнегасящий агент с большим расходом а огнегасящая способность улучшается.
Краткое описание чертежей
[0022] Фиг. 1 является основным схематическим изображением пожарной машины согласно вариантам осуществления настоящего раскрытия.
[0023] Фиг. 2 является частично укрупненным схематическим изображением пожарной машины согласно вариантам осуществления настоящего раскрытия.
[0024] Фиг. 3 является частично укрупненным схематическим изображением пожарной машины согласно некоторым другим вариантам осуществления настоящего раскрытия.
[0025] Фиг. 4 является схематическим изображением относительных позиций опорной платформы пожарной машины при нахождении опора стрелы в двух рабочих режимах согласно некоторым другим вариантам осуществления настоящего раскрытия.
[0026] Фиг. 5 является укрупненным схематическим изображением части М по фиг. 4.
[0027] Фиг. 6 является блок-схемой последовательности операций способа управления пожаротушением для пожарной машины согласно некоторым другим вариантам осуществления настоящего раскрытия.
[0028] Фиг. 7 является блок-схемой последовательности операций способа управления пожаротушением для пожарной машины согласно еще некоторым другим вариантам осуществления настоящего раскрытия.
Подробное описание изобретения
[0029] Далее приведено более подробное описание технических решений, предоставленных в настоящем раскрытии, со ссылкой на фиг. 1-7.
[0030] Ссылаясь на фиг. 1, варианты осуществления настоящего раскрытия описывают пожарную машину, которая включает в себя кузов 1 машины, опору 2 стрелы, опорную платформу 3, беспилотный летательный аппарат 4, переносный трубопровод 5 и водяной рукав 6. Кузов 1 машины выполнен с возможностью быть проходимым. Опора 2 стрелы монтируется на кузове 1 машины, и опора 2 стрелы выполнена с возможностью изменяющуюся амплитуду. Опорная платформа 3 устанавливается в хвостовом конце опоры 2 стрелы. Беспилотный летательный аппарат 4 устанавливается на опорной платформе 3. Переносный трубопровод 5 устанавливается на опоре 2 стрелы. Один конец водяного рукава 6 находится в сообщении по текучей среде с переносным трубопроводом 5, а другой конец водяного рукава 6 соединен с возможностью отсоединения с беспилотным летательным аппаратом 4.
[0031] Пожарная машина представляет собой среднегабаритную пожарную машину или малогабаритную пожарную машину с подъемной способностью на 40-50 метров. Такой тип пожарных машин обладает меньшими габаритами и хорошей маневренностью, а время, необходимое для операции подъема, является очень коротким, - это позволяет быстро осуществлять пожаротушение с помощью присоединенного беспилотного летательного аппарата 4.
[0032] Кузов 1 машины для пожарной машины разделяется посредством вращающейся опоры 105 в поворотной площадке 101 и разделяется на верхнюю часть машины и нижнюю часть машины. Нижняя часть машины имеет ходовую часть 102, переднюю опорную ножку 103, заднюю опорную ножку 104 и системный узел 106 пожаротушения с помощью сжатой воздушной пены. Система автоматически регулирует давление подачи и расход. Верхняя часть машины имеет опору 2 стрелы, переносный трубопровод 5, беспилотный летательный аппарат 4, опорную платформу 3 и устройство 9 хранения, модуль 10 обработки данных и т.п., которые описываются ниже. Опора 2 стрелы, например, представляет собой комбинированную опору стрелы.
[0033] Опора 2 стрелы представляет собой опору стрелы с изменяющейся амплитудой или телескопическую опору стрелы, или обладает как изменением амплитуды, так и телескопическими функциями. При рассмотрении опоры 2 стрелы с изменяющейся амплитудой в качестве примера, после изменения амплитуды хвостовой конец опоры 2 стрелы означает верхний конец опоры 2 стрелы. После изменения амплитуды, опора 2 стрелы приподнимает вместе с опорной платформой 3 таким образом, что беспилотный летательный аппарат 4 и пожарный гидрант 7, установленный на опорной платформе 3, приподнимаются вместе с ними. При использовании беспилотного летательного аппарата 4 для пожаротушения, беспилотный летательный аппарат 4 взлетает не с кузова 1 машины или земли, а взлетает с приподнятой опорной платформы 3, что сокращает расстояние полета, требуемое для запуска беспилотного летательного аппарата 4, сокращает время полета, уменьшает потребление мощности беспилотного летательного аппарата 4 и продлевает рабочее время беспилотного летательного аппарата 4.
[0034] С другой стороны, водяной рукав 6 не соединяется непосредственно с системным узлом 106 пожаротушения с помощью сжатой воздушной пены на кузове 1 машины, а соединяется с переносным трубопроводом 5, и переносный трубопровод 5 транспортирует пенообразующий огнегасящий агент в системном узле 106 пожаротушения с помощью сжатой воздушной пены на определенную высоту. В вариантах осуществления, описанных далее, пенообразующий огнегасящий агент непосредственно транспортируется в опорную платформу 3, так что водяной рукав 6 непосредственно принимает пенообразующий огнегасящий агент из переносного трубопровода 5, т.е. принимает пенообразующий огнегасящий агент из воздушного пространства, что позволяет длине водяного рукава 6 быть меньшей для идентичных требований по высоте пожаротушения. Когда беспилотный летательный аппарат 4 буксирует водяной рукав 6 таким образом, что он летит, вес водяного рукава 6 является небольшим, а вес, переносимый посредством беспилотного летательного аппарата 4, является небольшим. Следовательно, лучше компенсируется дефект недостаточной нагрузочной способности беспилотного летательного аппарата предшествующего уровня техники, а также для спасения при пожарах в высотных зданиях осуществляется непрерывное распыление с большим расходом или с большей высотой.
[0035] Пожарная машина, предоставленная посредством вышеуказанного технического решения, не только реализует традиционную функцию пожаротушения за счет распыления с подъемника, но также и позволяет существующему трубопроводу для транспортировки огнегасящего агента (т.е. противопожарному трубопроводу) пожарной машины с подъемником подавать огнегасящий агент в переносный трубопровод 5 в верхнем конце опоры 2 стрелы посредством переключения первого регулирующего клапана 18 и второго регулирующего клапана 19, которые описываются ниже. Беспилотный летательный аппарат 4 находится в сообщении по текучей среде с переносным трубопроводом 5 посредством водяного рукава 6 для осуществления переноса на большой высоте, чтобы получать огнегасящий агент, с тем чтобы взлетать для пожаротушения высотных зданий. Вышеуказанное техническое решение может использоваться для пожаротушения на большой высоте, при этом беспилотный летательный аппарат 4 буксирует сверхлегкий водяной рукав 6 для образования соединенной системы с пожарной машиной с подъемником для комбинированного спасения при пожарах в высотных зданиях; и при этом спасение при пожарах в высотных зданиях на большем количестве метров проводится эффективно, гибко и экономично. Кроме того, расход огнегасящего агента, распыляемого посредством беспилотного летательного аппарата 4, является большим.
[0036] Ниже подробно описываются конкретные реализации соответствующих частей.
[0037] Во-первых, представлена взаимосвязь установки беспилотного летательного аппарата 4. Ссылаясь на фиг. 1 и фиг. 2, беспилотный летательный аппарат 4 устанавливается на опорной платформе 3, и беспилотный летательный аппарат 4 и опорная платформа 3 расцепляются при необходимости в беспилотном летательном аппарате 4 для выполнения задачи по пожаротушению. В другие моменты времени, беспилотный летательный аппарат 4 и опорная платформа 3 поддерживаются заблокированными (зацепленными).
[0038] Ссылаясь на фиг. 2, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя запирающий механизм 14, при этом запирающий механизм 14 устанавливается на опорной платформе 3 с возможностью закрепления беспилотного летательного аппарата 4 и опорной платформы 3.
[0039] Запирающий механизм 14 имеет множество реализаций. Запирающий механизм 14 электрически соединяется с консолью 12 беспилотного летательного аппарата. При помощи работы консоли 12 беспилотного летательного аппарата запирающий механизм контролирует, заблокированы ли беспилотный летательный аппарат 4 и опорная платформа 3 или же беспилотный летательный аппарат 4 и опорная платформа 3 разблокированы.
[0040] Далее представлена взаимосвязь установки переносного трубопровода 5. Ссылаясь на фиг. 1 и фиг. 2, в некоторых вариантах осуществления, верхний конец переносного трубопровода 5 проходит в опорную платформу 3, а нижний конец переносного трубопровода 5 расположен в кузове 1 машины. Таким образом, беспилотный летательный аппарат 4 использует переносный трубопровод 5, а длина водяного рукава 6, буксируемого посредством беспилотного летательного аппарата 4, является максимально возможно короткой при идентичных требованиях по высоте пожаротушения.
[0041] В сравнении с предшествующим уровнем техники, в котором беспилотный летательный аппарат буксирует водяной рукав для пожаротушения высотных зданий в комбинации с городской основной боевой пожарной машиной или наземной перемещаемой системой приготовления пены, пожарной машине согласно вариантам осуществления настоящего раскрытия сущности нужен более короткий водяной рукав 6 для достижения той же высоты пожаротушения, поскольку огнегасящий агент переносится и подается на большой высоте, тем самым обладая лучшей пропускной способностью транспортировки трубопровода для огнегасящего агента. Если несущая способность беспилотного летательного аппарата 4 используется полностью, его рабочая высота является большей при той же длине буксируемого водяного рукава б; при идентичной рабочей высоте, водяной рукав 6 с большим диаметром также буксируется. Канал для транспортировки огнегасящего агента пожарной машины с подъемником полностью используется, и этот канал достигает большего диаметра (в общем, ≥DN80), чем водяной рукав б. Следовательно, полные потери давления при транспортировке огнегасящего агента будут меньшими. Таким образом, беспилотный летательный аппарат 4 поддерживается с возможностью буксировки водяного рукава 6 для достижения большей высоты для операции пожаротушения в будущем при условии, что максимальное давление системы пожаротушения с помощью сжатой воздушной пены остается неизменным (текущее максимальное давление составляет ≤1,2 МПа), или расход огнегасящего агента дополнительно может увеличиваться без увеличения высоты.
[0042] Ссылаясь на фиг. 1 и фиг. 2, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя устройство 9 хранения, и устройство 9 хранения устанавливается в нижней части опорной платформы 3 и содержит полость 91 для хранения. Один конец водяного рукава 6 находится в сообщении по текучей среде с транспортирующей трубой 404 беспилотного летательного аппарата 4, другой конец водяного рукава 6 находится в сообщении по текучей среде с переносным трубопроводом 5 пожарной машины, и средняя часть водяного рукава 6 хранится в полости 91 для хранения. Нижняя часть устройства 9 хранения выполнена с возможностью быть открываемой и закрываемой. Нижняя пластина устройства 9 хранения располагается с возможностью разделяться, и нижняя часть устройства 9 хранения быстро открывается посредством вращения каждой половины нижней пластины.
[0043] После того, как нижняя пластина устройства 9 хранения открывается, перекрывающаяся часть водяного рукава 6 опускается под собственным весом, так что беспилотный летательный аппарат 4 запускается для работы. Полная последовательность операций заключается в следующем: нижняя пластина устройства 9 хранения открывается, так что водяной рукав 6 выпадает под собственной силой тяжести, т.е. водяной рукав 6 более не складывается; после того, как беспилотный летательный аппарат 4 расстопорится, беспилотный летательный аппарат 4 летит вверх на определенную высоту, чтобы нависать; после того, как огнегасящий агент стабильно транспортируется в беспилотный летательный аппарат 4, беспилотный летательный аппарат 4 управляется таким образом, что он летит в позицию, которая должна подвергаться пожаротушению, и выполняет операцию пожаротушения.
[0044] Устройство 9 хранения располагается в головном конце пожарной машины с подъемником, комбинированная опора стрелы или трап пожарной машины с подъемником раскладывается в качестве переносной точки для работы на большой высоте, скручивание и зацепление водяного рукава 6 о землю также предотвращается, и горизонтальный пролет комбинированной опоры стрелы или трапа также уменьшает горизонтальное расстояние полета беспилотного летательного аппарата 4 и улучшает ситуацию, в которой беспилотный летательный аппарат 4 имеет предрасположенность к приложению тягового усилия под наклоном при буксировке водяного рукава 6. Существующий беспилотный летательный аппарат 4 буксирует водяной рукав 6 для пожаротушения высотных зданий в комбинации с городской основной боевой пожарной машиной, или наземной перемещаемой системой приготовления пены, и специальный персонал должен приводить в порядок водяной рукав 6 на земле, чтобы не допускать наматывания и чрезмерного приложения тягового усилия под наклоном.
[0045] Ниже описывается конкретная конструкция беспилотного летательного аппарата 4.
[0046] Ссылаясь на фиг. 1 и фиг. 2, в некоторых вариантах осуществления, беспилотный летательный аппарат 4 включает в себя корпус 401, вращающиеся крылья 402 и устройство 403 распыления огнегасящего агента. Предусмотрено множество вращающихся крыльев 402, и каждое вращающееся крыло 402 располагается в верхней части корпуса 401. Высота устройства 403 распыления огнегасящего агента ниже высот вращающихся крыльев 402 беспилотного летательного аппарата 4.
[0047] Беспилотный летательный аппарат 4 представляет собой электрический беспилотный летательный аппарат с несколькими вращающимися крыльями и содержит устройство определения шестимерной силы при буксировке, анемометр, камеру, навигационное Beidou-устройство, гироскопический стабилизирующий механизм и систему подачи мощности и т.д. Эти конструкции электрически соединяются с системой управления полетом беспилотного летательного аппарата 4 и используются для сбора такой информации, как состояние механического напряжения в реальном времени буксируемого водяного рукава 6, мгновенная скорость ветра, ситуация с окружающими помехами, состояние распыления огнегасящего агента и противопожарный эффект, а также координаты позиционирования в воздухе во время работы на большой высоте. Информация передается в беспроводное рабочее и управляющее устройство через систему управления полетом. Огнегасящий агент из переносного трубопровода 5 транспортируется вверх через водяной рукав 6 и далее транспортируется в устройство 403 распыления огнегасящего агента через встроенный трубопровод беспилотного летательного аппарата 4.
[0048] Корпус 401 представляет собой часть основного корпуса беспилотного летательного аппарата 4, и традиционные интегральные компоненты беспилотного летательного аппарата 4, такие как камера, навигационное устройство, гироскопический стабилизирующий механизм, система подачи мощности и система управления полетом, интегрируются в корпус 401. Посадочное устройство располагается ниже корпуса 401.
[0049] Ссылаясь на фиг. 3, в некоторых других вариантах осуществления, реализация устройства 403 распыления огнегасящего агента беспилотного летательного аппарата отличается от реализации, описанной выше. В частности, устройство 403 распыления огнегасящего агента включает в себя транспортирующую трубу 404 и распыляющую трубу 405. Транспортирующая труба 404 проникает из нижней части корпуса 401 в верхнюю часть корпуса 401, распыляющая труба 405 находится в сообщении по текучей среде с транспортирующей трубой 404, и позиция распыляющей трубы 405 выше позиций вращающихся крыльев 402.
[0050] Устройство 403 распыления огнегасящего агента используется для распыления огнегасителя. Беспилотный летательный аппарат 4 не содержит элемент хранения огнегасящего агента по сути, и огнегасящий агент транспортируется в распыляющую трубу 405 через транспортирующую трубу 404. Транспортирующая труба 404 находится в сообщении по текучей среде с элементом хранения огнегасящего агента, расположенным на пожарной машине, даже на земле, других высоких зданиях или неподвижном объекте, с тем чтобы транспортировать огнегасящий агент в распыляющую трубу 405 устройства 403 распыления огнегасящего агента.
[0051] Ссылаясь на фиг. 3, в некоторых вариантах осуществления, транспортирующая труба 404 включает в себя первый трубопровод 404а, вторые трубопроводы 404b и третий трубопровод 404с. Первый трубопровод 404а расположен ниже корпуса 401. Вторые трубопроводы 404b расположены ниже по ходу потока относительно первого трубопровода 404а и находятся в сообщении по текучей среде с первым трубопроводом 404а. Имеется, по меньшей мере, два вторых трубопровода 404b, и соответствующие вторые трубопроводы 404b располагаются симметрично относительно центральной оси корпуса 401. Третий трубопровод 40 с расположен ниже по ходу потока относительно соответствующих вторых трубопроводов 404b и находится в сообщении по текучей среде с соответствующими вторыми трубопроводами 404b.
[0052] Каждый из первого трубопровода 404а, вторых трубопроводов 404b и третьего трубопровод 404 с изготовлен из легкого материала, такого как алюминиевый сплав и другие сверхлегкие металлы. Транспортирующая труба 404 приспосабливает симметричную конструкцию сначала разделения, а затем комбинирования, что не только упрощает установку и крепление транспортирующей трубы 404, но также и позволяет беспилотному летательному аппарату проще поддерживать хорошее равновесие.
[0053] В некоторых вариантах осуществления, центральная ось первого трубопровода 404а совпадает с центральной осью корпуса 401, и/или центральная ось третьего трубопровода 404 с совпадает с центральной осью корпуса 401. Таким образом, беспилотному летательному аппарату 4 проще поддерживать равновесие при работе в воздухе.
[0054] В некоторых вариантах осуществления, беспилотный летательный аппарат 4 дополнительно включает в себя элемент 8 определения скорости ветра, и элемент 8 определения скорости ветра располагается в верхней части корпуса 401. Элемент 8 определения скорости ветра, например, представляет собой анемометр, и скорость ветра в позиции, в которой расположен беспилотный летательный аппарат 4, отслеживается в реальном времени посредством анемометра.
[0055] Ссылаясь на фиг. 3, в некоторых вариантах осуществления, беспилотный летательный аппарат 4 дополнительно включает в себя датчик 406 шестимерной силы, один конец датчика 406 шестимерной силы устанавливается на корпусе 401 беспилотного летательного аппарата 4, и устройство 403 распыления огнегасящего агента устанавливается на другом конце датчика 406 шестимерной силы, чтобы определять шестимерную силу, прилагаемую к беспилотному летательному аппарату посредством буксируемого объекта в ходе полета беспилотного летательного аппарата 4. Буксируемый объект, в частности, например, представляет собой сверхлегкий водяной рукав 6. Единичный вес сверхлегкого водяного рукава 6 меньше или равен 150 гр/м. В некоторых вариантах осуществления, длина водяного рукава 6 составляет 90-110 метров. Водяной рукав этой длины может реализовывать пожаротушение на большой высоте с высотой вплоть до приблизительно 120 метров, если согласуется с существующей среднегабаритной пожарной машиной с подъемником. В некоторых вариантах осуществления, водяной рукав 6 выполнен с возможностью транспортировать огнегасящий агент в виде пенообразующей жидкой смеси с временами пенообразования в 6-8 раз.
[0056] Далее представлен контент, связанный с протоком для транспортировки огнегасящего агента пожарного гидранта.
[0057] Ссылаясь на фиг. 3, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя пожарный гидрант 7 и противопожарный трубопровод 17. Противопожарный трубопровод 17 представляет собой существующий трубопровод на пожарной машине. Переносный трубопровод 5 представляет собой ответвление, отделенное от средней секции противопожарного трубопровода 17. Пожарный гидрант 7 устанавливается на опорной платформе 3, и пожарный гидрант 7 находится в сообщении по текучей среде с противопожарным трубопроводом 17. В процессе варьирования амплитуды опоры 2 стрелы, пожарный гидрант 7 подвергается варьированию амплитуды вместе с ней. Предельная кривая S1 безопасного рабочего диапазона в режиме пожаротушения с помощью подъемника показывается на фиг. 4 и фиг. 5. Когда беспилотный летательный аппарат 4 используется для пожаротушения, после того, как опора 2 стрелы подвергается варьированию амплитуды в заданную позицию, опора 2 стрелы более не перемещается, а остается в этой позиции.
[0058] Ссылаясь на фиг. 3, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя первый регулирующий клапан 18 и второй регулирующий клапан 19. Первый регулирующий клапан 18 располагается в переносном трубопроводе 5 и выполнен с возможностью контроля открыт переносный трубопровод 5 или нет. Второй регулирующий клапан 19 располагается в выпускном конце противопожарного трубопровода 17 и выполнен с возможностью контроля открыт противопожарный трубопровод 17 или нет. Второй регулирующий клапан 19 расположен в хвостовом конце противопожарного трубопровода 17, и концевая часть переносного трубопровода 5, сообщающаяся с противопожарным трубопроводом 17, расположена выше второго регулирующего клапана 19. Рабочие состояния первого регулирующего клапана 18 и второго регулирующего клапана 19 являются противоположными. Первый регулирующий клапан 18 и второй регулирующий клапан 19, например, представляют собой электромагнитные клапаны. Посредством обнаружения состояния пожарного гидранта 7, состояние беспилотного летательного аппарата 4 и требования по пожаротушению, позиции клапанов для первого регулирующего клапана 18 и второго регулирующего клапана 19 автоматически регулируются, с тем чтобы реализовывать требуемое состояние подачи огнегасящего агента.
[0059] Далее представлена конкретная реализация системы управления пожарной машины.
[0060] Система управления пожарной машины включает в себя две главных части, одна из которых представляет собой традиционную часть управления пожарной машины, а другая представляет собой часть управления, связанную с управлением беспилотным летательным аппаратом.
[0061] Ссылаясь на фиг. 1, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя основную консоль 11, модуль 10 обработки данных и консоль 12 беспилотного летательного аппарата. Основная консоль 11 представляет собой традиционную часть управления пожарной машины, но часть, взаимодействующая с управлением беспилотным летательным аппаратом, добавляется, чтобы реализовывать функции защиты безопасности работы, а также эксплуатации и управления традиционной пожарной машины с подъемником, как и взаимодействие через сигналы с беспилотным летательным аппаратом. Модуль 10 обработки данных, консоль 12 беспилотного летательного аппарата и рабочий монитор 16 функционального управления беспилотного летательного аппарата, описанные далее, представляют собой жизненно важные части для того, чтобы реализовывать управление беспилотным летательным аппаратом.
[0062] Модуль 10 обработки данных устанавливается в опорной платформе 3 или хвостовом конце опоры 2 стрелы, т.е. в верхнем конце опоры 2 стрелы в протягивающемся состоянии. Беспилотный летательный аппарат 4 включает в себя модуль передачи данных, и модуль 10 обработки данных находится в сообщении с модулем передачи данных беспроводным способом. Основная консоль 11 находится в сообщении с модулем 10 обработки данных. Консоль 12 беспилотного летательного аппарата также находится в сообщении с модулем 10 обработки данных. Консоль 12 беспилотного летательного аппарата выполнена с возможностью управлять транспортируемым количеством огнегасящего агента и/или тем, следует или нет транспортировать огнегасящий агент, согласно параметрам состояния беспилотного летательного аппарата 4, передаваемым посредством модуля передачи данных и полученным посредством модуля 10 обработки данных, а также предварительно установленным параметрам беспилотного летательного аппарата 4.
[0063] Модуль передачи данных и антенна беспилотного летательного аппарата 4 не только передают традиционную информацию восходящей/нисходящей линии связи и инструкции между системой управления полетом и модулем 10 обработки данных, но также и отправляют входные сигналы датчика шестимерной силы и анемометра, как и такую информацию, как координаты позиционирования в воздухе, в модуль 10 обработки данных. Модуль 10 обработки данных также устанавливается на опорной платформе 3. В ходе работы, поскольку опора 2 стрелы и опорная платформа 3 раскладываются в воздухе, модуль 10 обработки данных находится ближе к беспилотному летательному аппарату 4 во всем аппарате, и окружение связи на большой высоте лучше. По сравнению со случаем, в котором модуль 10 обработки данных размещается в нижней части, помехи при экранировании на стройплощадках зданий для принимаемых и передаваемых сигналов уменьшаются или даже исключаются. Соединение связи между модулем 10 обработки данных и беспилотным летательным аппаратом 4 реализуется беспроводным способом, и модуль 10 обработки данных также соединяется с основной консолью 11 и консолью 12 беспилотного летательного аппарата пожарной машины с подъемником проводным способом через кабели для интерактивного управления полетом при взлете, распылением огнегасящего агента и т.п. Кроме того, чтобы обеспечивать безопасность работы беспилотного летательного аппарата 4, модуль 10 обработки данных и консоль 12 беспилотного летательного аппарата также автоматически управляют подачей потока и выпуском потока наземного огнегасящего агента и включают два стопорящих (стопорных) устройства 15 с электрическим управлением, соединенные с двумя концами сверхлегкого водяного рукава 6, согласно предварительно определенной нагрузочной способности беспилотного летательного аппарата 4, предельному значению в отношении скорости окружающего ветра и настройке расстояния, дозволенное беспилотному летательному аппарату 4 от точки взлета, с тем чтобы обеспечивать то, что беспилотный летательный аппарат 4 не разобьется вследствие чрезмерной буксировки.
[0064] В некоторых вариантах осуществления, предварительно установленные параметры беспилотного летательного аппарата 4 включают в себя, по меньшей мере, одно из следующего: предварительно определенная нагрузочная способность беспилотного летательного аппарата 4, предельное значение беспилотного летательного аппарата 4 в отношении скорости окружающего ветра и заданное расстояние, дозволенное беспилотному летательному аппарату 4 от точки взлета. Любой из вышеуказанных четырех параметров превышает пороговое значение, что указывает то, что беспилотный летательный аппарат 4 должен выбирать одну из операций возврата, выгрузки и сбрасывания нагрузки и посадки.
[0065] В некоторых вариантах осуществления, основная консоль 11 и/или консоль 12 беспилотного летательного аппарата устанавливаются на кузове 1 машины. Консоль 12 беспилотного летательного аппарата соединяется с модулем 10 обработки данных, расположенным в головном конце пожарной машины с подъемником, проводным способом. Через консоль 12 беспилотного летательного аппарата, операторы управляют открытием запирающего механизма 14, открытием нижней пластины устройства 9 хранения, операциями взлета и пожаротушения беспилотного летательного аппарата 4, включением и выключением стопорящего устройства 15 с электрическим управлением на стыке переносного трубопровода 5 и водяного рукава 6 и т.п.
[0066] Через рабочий монитор 16 беспилотного летательного аппарата, кнопка нажимается вручную для того, чтобы выбирать, принимать и отображать изображение камеры 13 в головном конце пожарной машины с подъемником или изображение камеры на традиционном интегральном компоненте (камере, навигационном устройстве, гироскопическом стабилизирующем механизме, системе подачи мощности или системе управления полетом) беспилотного летательного аппарата 4. Консоль 12 беспилотного летательного аппарата в поворотной площадке соединяется с модулем 10 обработки данных, расположенным в головном конце пожарной машины с подъемником, проводным способом.
[0067] Через консоль 12 беспилотного летательного аппарата, операторы управляют открытием закрепленного запирающего механизма беспилотного летательного аппарата 4, открытием нижней пластины устройства 9 хранения, операциями взлета и пожаротушения беспилотного летательного аппарата 4, открытием запирающего механизма в сопрягающем элементе водяного рукава 6, соединенного в переносном транспортирующем порту, и т.п. Через рабочий монитор беспилотного летательного аппарата, кнопка нажимается вручную для того, чтобы выбирать, принимать и отображать изображение камеры 13 в головном конце пожарной машины с подъемником или изображение камеры на беспилотном летательном аппарате 4.
[0068] Чтобы собирать данные беспилотного летательного аппарата, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя камеру 13, и камера 13 устанавливается в верхней части опоры 2 стрелы или опорной платформы 3 и выполнена с возможностью обнаруживать процессы взлета и полета беспилотного летательного аппарата 4.
[0069] Камера 13 взаимодействует с модулем 10 обработки данных, описанным выше, чтобы объединенно отслеживать информацию помех во время взлета беспилотного летательного аппарата 4. Модуль 10 обработки данных представляет собой жизненно важную составную часть передачи управляющей информации, находится в сигнальном соединении как с системой управления полетом беспилотного летательного аппарата 4, так и с системой управления пожарной машины с подъемником и используется для того, чтобы управлять полетом при взлете беспилотного летательного аппарата 4, распылением огнегасящего агента и другими операциями.
[0070] В дополнение к вышеуказанному управлению, также необходимо управлять состоянием соединения водяного рукава 6. Ссылаясь на фиг. 3 и фиг. 4, в некоторых вариантах осуществления, пожарная машина дополнительно включает в себя два стопорящих (стопорных) устройства 15 с электрическим управлением, при этом одно стопорящее устройство 15 с электрическим управлением располагается в переносном трубопроводе 5 с возможностью стопорить (блокировать) и расстопорить (разблокировать) один конец водяного рукава 6 и переносного трубопровода 5; другое стопорящее устройство 15 с электрическим управлением располагается на другом конце первого трубопровода 404а с возможностью стопорить и расстопорить первый трубопровод 404а и верхний конец водяного рукава 6.
[0071] Оба конца водяного рукава 6 содержат стопорящие устройства 15 с электрическим управлением, и водяной рукав 6 расположен между пожарной машиной и беспилотным летательным аппаратом 4. Одно стопорящее устройство 15 с электрическим управлением используется для того, чтобы взаимодействовать с беспилотным летательным аппаратом 4, чтобы стопорить соединение между нижним сопрягающим элементом транспортирующей трубы 404 и верхним сопрягающим элементом сверхлегкого водяного рукава б; и другое стопорящее устройство 15 с электрическим управлением используется для того, чтобы стопорить соединение между нижним сопрягающим элементом сверхлегкого водяного рукава 6 и сопрягающим элементом трубопровода для подачи наземного огнегасящего агента (т.е. переносным трубопроводом 5). Посредством управления стопорящими устройствами 15 с электрическим управлением, водяной рукав 6 переключается между транспортировкой огнегасящего агента и выпуском потока.
[0072] Далее представлена часть управления для использования пожарной машины для пожаротушения.
[0073] Пожарная машина имеет два рабочих режима: первый режим представляет собой режим пожаротушения с помощью подъемника пожарной машины. Второй режим представляет собой режим пожаротушения с помощью соединенного беспилотного летательного аппарата.
[0074] В общем, когда пожарная машина с подъемником выполняет только операцию пожаротушения традиционной пожарной машины с подъемником, беспилотный летательный аппарат 4 находится в позиции А, показанной на фиг. 5. Беспилотный летательный аппарат 4 размещается в верхней части опорной платформы 3 через запирающий механизм 14. Устройство 9 хранения расположено ниже опорной платформы 3, и сверхлегкий водяной рукав 6 складывается и затем помещается в устройство 9 хранения.
[0075] Ссылаясь на фиг. 5, когда пожарная машина с подъемником выполняет операцию пожаротушения соединенного беспилотного летательного аппарата 4, действия беспилотного летательного аппарата 4 главным образом включают в себя два процесса. Первый процесс заключается в том, чтобы взлетать из позиции В в позицию С и нависать, чтобы ожидать подачи и транспортировки огнегасящего агента; второй процесс заключается в том, чтобы лететь из позиции С на поверхность проведения спасательной операции. Далее приводится конкретное описание. Во-первых, нижняя пластина устройства 9 хранения открывается. После этого, перекрывающаяся часть водяного рукава 6 в устройстве 9 хранения опускается под собственной силой тяжести, так что операция запуска беспилотного летательного аппарата 4 не ограничивается посредством перекрытия сверхлегкого водяного рукава 6. Разложенное состояние водяного рукава 6 показывается на фиг. 4 и фиг. 5. Затем беспилотный летательный аппарат 4 взлетает на определенную высоту вместе с водяным рукавом 6, который не транспортирует огнегасящий агент, и после этого нависает, в это время, огнегасящий агент начинает транспортироваться. После того, как транспортировка огнегасящего агента является стабильной, беспилотный летательный аппарат 4 переносит водяной рукав 6, заполненный огнегасящим агентом, таким образом, что он летит в позицию, которая должна подвергаться пожаротушению.
[0076] Перед подробным представлением различных режимов пожаротушения, сначала представлена конкретная реализация пожарной машины. Пожарная машина приспосабливает пожарную машину с подъемником с подъемной способностью на 45 метров. Пожарная машина имеет трехосную ходовую часть, и общий размер всей машины в состоянии движения составляет ≤12,5 метров. Предусмотрено два типа огнегасящих агентов, т.е. вода и пенообразующая жидкость, на пожарной машине. Трубопровод для транспортировки огнегасящего агента пожарной машины с подъемником имеет диаметр ≥80 мм. Установленный в аппарате беспилотный летательный аппарат 4 представляет собой электрический беспилотный летательный аппарат с несколькими вращающимися крыльями с несущей способностью в 50 кг. Когда пожарный гидрант 7 используется для пожаротушения отдельно, соответствующие параметры являются следующими: времена N1 пенообразования, давление Р1 пены и расход Q1 пенообразующей жидкой смеси. Когда беспилотный летательный аппарат 4 используется для пожаротушения, соответствующие параметры являются следующими: времена N2 пенообразования, давление Р2 пены и расход Q2 пенообразующей жидкой смеси.
[0077] Времена N1 пенообразования задаются в идентичном диапазоне изменения с N2 и составляют 6-8 раз. Диапазон изменения расхода Q1 пенообразующей жидкой смеси составляет ≤20 литров/секунда, и Q2 составляет ≤3 литра/секунда; давление Р1 пены составляет ≤0,8 МПа, и Р2 составляет ≤1,2 МПа. Беспилотный летательный аппарат 4 буксирует сверхлегкий водяной рукав 6 на 100 метров. Диаметр водяного рукава 6 составляет от 45 мм до 55 мм, например, 50 мм (единичный вес водяного рукава 6 составляет 150 гр/м), и спасение при пожарах в высотных зданиях с высотой в 120 метров и пролетом в 30 метров должно проводиться.
[0078] Системный узел 106 пожаротушения с помощью сжатой воздушной пены автоматически регулирует давление и расход подаваемой сжатой воздушной пены. Чтобы удовлетворять требованию по распылению пожарного гидранта 7 (20 литров/секунда ≥ расход пенообразующей жидкой смеси ≥8 литров/секунда) в режиме пожаротушения с помощью подъемника пожарной машины, а также удовлетворять требованию по распылению при пожаротушении беспилотного летательного аппарата 4 для полетов на большой высоте (5 литров/секунда ≥ расход пенообразующей жидкой смеси ≥1 литр/секунда) в рабочем режиме соединенного беспилотного летательного аппарата 4, следующий способ управления приспосабливается в таких аспектах, как состояние приготовления и подачи огнегасящего агента.
[0079] В общем, стратегия управления и требования по управлению пожарной машины с подъемником для системного узла пожаротушения с помощью сжатой воздушной пены, модуля регулирования клапанов и модуля управления безопасными рабочими положениями отличаются в двух различных режимах пожаротушения. Диапазон изменения времен N1 пенообразования составляет 5-15 раз, и диапазон изменения N2 составляет 6-8 раз; диапазон изменения расхода Q1 пенообразующей жидкой смеси составляет 8-20 литров/секунда, и диапазон изменения Q2 составляет 1-5 литров/секунда. Давление пены Р2>Р1. Состояния переключения первого регулирующего клапана 18 и второго регулирующего клапана 19 являются противоположными.
[0080] Основная консоль 11 содержит кнопку переключения режима пожаротушения с помощью подъемника пожарной машины/пожаротушения с помощью соединенного беспилотного летательного аппарата, кнопка также используется для того, чтобы управлять открытым и закрытым состояниями первого регулирующего клапана 18 и второго регулирующего клапана 19 одновременно, и открытое и закрытое состояния первого регулирующего клапана 18 и второго регулирующего клапана 19 проектируются с возможностью быть противоположными. Когда кнопка переключения находится в режиме пожаротушения с помощью подъемника пожарной машины, огнегасящая способность в этом режиме зависит от рабочей огнегасящей способности пожарной машины с подъемником с использованием пожарного гидранта 7 в головном конце, который является идентичным пожарному гидранту 7 в головном конце традиционной пожарной машины с подъемником, оба из которых реализуют пожаротушение с помощью воды или пены с большим расходом посредством использования установленного в аппарате подкачивающего насоса, воды, пенообразующего основного раствора, пеносмесителя, воздушной компрессорной системы и т.д. Система пожаротушения с помощью сжатой воздушной пены работает согласно требованиям традиционной пожарной машины с подъемником, что подробно не повторяется здесь.
[0081] Помимо этого, предельная кривая безопасного рабочего диапазона в режиме пожаротушения с помощью подъемника представляет собой S1, и комбинированная опора стрелы работает только в пределах безопасного диапазона, чтобы удовлетворять такому требованию, что пожарный гидрант 7 находится близко к спасаемому объекту. Способ работы машины в этом режиме является идентичным способу работы машины традиционной пожарной машины с подъемником, и перемещаемые компоненты, заново добавленные в головной конец, такие как беспилотный летательный аппарат 4, сверхлегкий водяной рукав 6 и другие связанные принадлежности, являются неподвижными относительно головной части опоры стрелы. Когда запирающий механизм 14 беспилотного летательного аппарата 4 не стопорится, кнопка переключения не может переводить машину в режим пожаротушения с помощью подъемника пожарной машины.
[0082] В режиме пожаротушения с помощью соединенного беспилотного летательного аппарата, рабочее положение комбинированной опоры стрелы находится в безопасном рабочем диапазоне режима пожаротушения с помощью подъемника пожарной машины и ограничено предельной кривой S2 в небольшом диапазоне в стандартном рабочем положении, требуемом в операции соединения. Беспилотный летательный аппарат 4 запускается, чтобы выполнять операцию пожаротушения только в этом диапазоне на кривой. После того как этот режим пожаротушения определяется в этой области, действие опоры стрелы должно ограничиваться. Когда комбинированная опора стрелы не находится в рамках предельной кривой S2 в небольшом диапазоне, кнопка переключения не может переводить машину в режим пожаротушения с помощью соединенного беспилотного летательного аппарата. Следовательно, после того как машина находится в режиме пожаротушения с помощью соединенного беспилотного летательного аппарата, пожаротушение высотных зданий зависит только от того, что беспилотный летательный аппарат 4 летит высоко и приближается к спасаемому объекту.
[0083] Когда запирающий механизм 14 открывается, только после того, как первый регулирующий клапан 18 и стопорящее устройство 15 с электрическим управлением в переносном трубопроводе 5 управляются таким образом, что они являются открытыми, и беспилотный летательный аппарат 4 буксирует сверхлегкий водяной рукав 6 таким образом, что он отделяется от машины, машина может возвращаться в режим пожаротушения с помощью подъемника пожарной машины посредством кнопки переключения, и комбинированная опора стрелы пожарной машины с подъемником работает снова в пределах безопасного диапазона в режиме пожаротушения с помощью подъемника пожарной машины.
[0084] Ниже подробно описываются два режима пожаротушения.
[0085] Первый рабочий режим: режим пожаротушения с помощью подъемника пожарной машины.
[0086] С учетом нацеленности на пожары в высотных зданиях ниже 60 метров, режим пожаротушения с помощью подъемника пожарной машины приспосабливается для работы, и водный пенообразующий двухцелевой пожарный гидрант 7 в головном конце пожарной машины с подъемником главным образом приспосабливается для пожаротушения. Пожарный гидрант 7 распыляет огнегасящий агент с большим расходом ≥60 литров/секунда (воду) или ≥120 литров/секунда (сжатую воздушную пену с временами пенообразования в 6-8 раз) для пожаротушения.
[0087] В этом состоянии, опора 2 стрелы подвергается варьированию амплитуды нормально, и предельная кривая S1 безопасного рабочего диапазона пожарного гидранта 7 в режиме пожаротушения с помощью подъемника показывается на фиг. 4 и фиг. 5. На фиг. 4, рабочая высота означает высоту пожарного гидранта 7 относительно земли. Рабочая амплитуда означает горизонтальное расстояние пожарного гидранта 7 от точки поворота опоры стрелы. Согласно существующим условиям предшествующего уровня техники, известно, что четырехосные пожарные машины с подъемником в 40-50 метров могут переносить приблизительно 3 тонны огнегасящего агента на борту, и рабочая амплитуда достигает приблизительно 20 метров, что хорошо реализует спасение при пожарах в высотных зданиях ниже 60 метров.
[0088] В режиме пожаротушения с помощью подъемника пожарной машины, протяженность и угол варьирования амплитуды комбинированной опоры стрелы или трапа зависят от стабильности всей машины и вычисления и управления прочностью и жесткостью основных конструктивных элементов. Отличие от традиционных пожарных машин с подъемником заключается в том, что веса беспилотного летательного аппарата 4 и связанных принадлежностей, заново добавленных в головной конец, обязательно учитываются при вычислении, и положение комбинированной опоры стрелы или трапа работает в пределах безопасного диапазона, чтобы удовлетворять такому требованию, что пожарный гидрант 7 находится близко к спасаемому объекту. Способ работы машины в этом режиме является идентичным способу работы машины традиционной пожарной машины с подъемником, и перемещаемые компоненты, заново добавленные в головной конец, такие как беспилотный летательный аппарат 4, водяной рукав 6 и другие связанные принадлежности, устанавливаются на месте в боевой готовности. Чтобы упрощать и надежно реализовывать управление безопасностью работы при пожаротушении с помощью подъемника пожарной машины, дополнительно задается то, что только тогда, когда закрепленный запирающий механизм 14 беспилотного летательного аппарата 4 стопорится, кнопка переключения переводит машину в режим пожаротушения с помощью подъемника пожарной машины.
[0089] Работа машины в режиме пожаротушения с помощью подъемника пожарной машины по существу является аналогичной работе традиционной пожарной машины с подъемником, и не упомянутые вопросы не повторяются подробно здесь. Далее акцентируется внимание на способе работы в режиме пожаротушения с помощью соединенного беспилотного летательного аппарата.
[0090] Второй рабочий режим представляет собой режим пожаротушения с помощью соединенного беспилотного летательного аппарата.
[0091] Для пожаров в высотных зданиях более чем на 60 метров, режим пожаротушения с помощью соединенного беспилотного летательного аппарата приспосабливается для работы. В этом режиме, водяной рукав 6 главным образом буксируется посредством беспилотного летательного аппарата 4, снабжается посредством системы приготовления и транспортировки огнегасящего агента пожарной машины с подъемником и запускается с небольшим расходом огнегасящего агента для приближения и пожаротушения посредством устройства 403 распыления огнегасящего агента беспилотного летательного аппарата 4. Устройство 403 распыления огнегасящего агента беспилотного летательного аппарата 4 распыляет небольшой расход огнегасящего агента ≥18 литров/секунда (сжатой воздушной пены с временами пенообразования в 6-8 раз) для того, чтобы запускаться, с тем чтобы приближаться к источнику возгорания для пожаротушения. В этом случае, опора 2 стрелы более не работает, и позиция пожарного гидранта 7 находится в пределах диапазона предельной кривой S2 в небольшом диапазоне на фиг. 4 и фиг. 5 и считается удовлетворяющей условиям по позиции, требуемым для взлета в воздухе беспилотного летательного аппарата.
[0092] До того, как беспилотный летательный аппарат 4 управляется для пожаротушения, состояние беспилотного летательного аппарата 4 отслеживается.
[0093] Различные операции для управления беспилотным летательным аппаратом 4 реализуются посредством объединенной работы основной консоли 11 и консоли 12 беспилотного летательного аппарата пожарной машины с подъемником. Основная консоль 11 содержит кнопку переключения режима пожаротушения с помощью подъемника пожарной машины/пожаротушения с помощью соединенного беспилотного летательного аппарата, с тем чтобы переключать противопожарное спасение в двух режимах. В различных рабочих режимах, диапазон безопасных рабочих положений комбинированной опоры стрелы или трапа, работающей и управляемой посредством новой пожарной машины с подъемником, отличается, и удобство использования комбинированной опоры стрелы или трапа отличается.
[0094] В режиме пожаротушения с помощью соединенного беспилотного летательного аппарата, протяженность и угол варьирования амплитуды комбинированной опоры стрелы или трапа по-прежнему зависят от стабильности всей машины и вычисления и управления прочностью и жесткостью основных конструктивных элементов. Отличие заключается в том, что в дополнение к весам нового добавленного беспилотного летательного аппарата 4 и связанных принадлежностей, вес сверхлегкого водяного рукава 6, заполненного огнегасящим агентом, и связанное влияние буксируемого водяного рукава 6 под внешней ветровой нагрузкой также учитываются при вычислении. Следовательно, рабочее положение находится в пределах безопасного рабочего диапазона режима пожаротушения с помощью подъемника пожарной машины. Чтобы упрощать и надежно реализовывать управление безопасностью работы при пожаротушении соединенного беспилотного летательного аппарата 4, дополнительно задается то, что машина переводится в режим пожаротушения с помощью соединенного беспилотного летательного аппарата только тогда, когда комбинированная опора стрелы или трап находится в определенном стандартном рабочем положении в небольшом диапазоне, и беспилотный летательный аппарат 4 запускается, чтобы выполнять операцию пожаротушения только в режиме пожаротушения с помощью соединенного беспилотного летательного аппарата. Кроме того, после того как машина находится в режиме пожаротушения с помощью соединенного беспилотного летательного аппарата, комбинированная опора стрелы или трап пожарной машины с подъемником должна стопориться в этом стандартном рабочем положении в небольшом диапазоне, и пожаротушение высотных зданий зависит только от того, что беспилотный летательный аппарат 4 летит высоко и приближается к спасаемому объекту.
[0095] Когда кнопка переключения находится в режиме пожаротушения с помощью соединенного беспилотного летательного аппарата, установленный в аппарате контроллер автоматически ограничивает давление и расход подкачивающего насоса и давление впрыска и расход сжатого воздуха в реальном времени согласно высоте полета беспилотного летательного аппарата 4 и обратной связи по силе устройства определения шестимерной силы, с тем чтобы реализовывать оптимальный расход для сверхлегкого водяного рукава 6, чтобы транспортировать огнегасящий агент, и времена пенообразования в 6-8 раз. Оптимальный расход для водяного рукава 6, чтобы транспортировать огнегасящий агент, означает максимальный расход при условии обоснованного давления распыления огнегасящего агента беспилотного летательного аппарата 4 в пределах диапазона нагрузочной способности беспилотного летательного аппарата 4. Времена пенообразования в 6-8 раз в нижней части управляются таким образом, чтобы обеспечивать отсутствие влияния на фактическую эффективность пожаротушения, вызываемого посредством того факта, что времена пенообразования влажной пены в распыляющем порте беспилотного летательного аппарата 4 диссимилируют вследствие сегрегации во время вертикальной транспортировки на большие расстояния влажной пены с низкими временами. Когда механическое напряжение датчика 406 шестимерной силы достигает нагрузочной способности безопасной работы беспилотного летательного аппарата 4, или фактически измеренная скорость ветра анемометра для больших высот достигает номинальной мгновенной скорости ветра для безопасной работы, установленный в аппарате контроллер также содержит выпускной клапан, который автоматически открывает трубопровод для транспортировки огнегасящего агента, чтобы уменьшать нагрузку беспилотного летательного аппарата 4 посредством аварийного выпуска потока.
[0096] Для системы управления пожарной машины, приспосабливается следующий способ работы.
[0097] Во-первых, в основной консоли 11 в поворотной площадке новой пожарной машины с подъемником, комбинированная опора стрелы работает с возможностью достигать предельной кривой S2 в небольшом диапазоне в стандартном рабочем положении, требуемом во время операции соединения беспилотного летательного аппарата 4, и затем кнопка переключения режима нажимается для режима пожаротушения с помощью соединенного беспилотного летательного аппарата.
[0098] Во-вторых, консоль 12 беспилотного летательного аппарата в поворотной площадке работает, нижняя пластина устройства 9 хранения, первый регулирующий клапан 18 и стопорящее (стопорное) устройство 15 с электрическим управлением в переносном трубопроводе 5 открываются, перекрывающаяся часть водяного рукава 6 укладывается, беспилотный летательный аппарат 4 работает и управляется таким образом, чтобы взлетать с опорной платформы 3 и нависать, системный узел 106 пожаротушения с помощью сжатой воздушной пены пожарной машины с подъемником активируется для работы, устройство 403 распыления огнегасящего агента беспилотного летательного аппарата 4 имеет возможность распылять влажную пену, и беспилотный летательный аппарат 4 работает и управляется таким образом, что он летит высоко и приближается к спасаемой цели для пожаротушения.
[0099] В завершение, когда беспилотный летательный аппарат 4 завершает операцию пожаротушения, операторы открывают стопорящее устройство 15 с электрическим управлением, соединенное с сопрягающим элементом сверхлегкого водяного рукава 6 в переносном трубопроводе 5 через консоль 12 беспилотного летательного аппарата, и активируют беспилотный летательный аппарат 4 таким образом, чтобы буксировать сверхлегкий водяной рукав 6 на землю. Затем машина переводится в режим пожаротушения с помощью подъемника пожарной машины посредством кнопки переключения, и машина собирается в идентичном процессе с традиционной пожарной машиной с подъемником, что подробно не повторяется здесь.
[00100] В некоторых вариантах осуществления, пожарная машина также имеет такую конфигурацию, в которой когда запирающий механизм 14 беспилотного летательного аппарата 4 открывается, только когда запирающий механизм, соединенный с сопрягающим элементом сверхлегкого водяного рукава 6, открывается (в это время, беспилотный летательный аппарат 4 может буксировать сверхлегкий водяной рукав 6 таким образом, что он отделяется от машины), кнопка основной консоли 11 может переключаться, чтобы позволять машине возвращаться в режим пожаротушения с помощью подъемника пожарной машины, и комбинированная опора стрелы или трап пожарной машины с подъемником может работать снова в пределах безопасного диапазона режима пожаротушения с помощью подъемника пожарной машины.
[00101] Согласно пожарной машине, предоставленной посредством вышеуказанных технических решений, когда опора 2 стрелы пожарной машины с подъемником раскладывается, беспилотный летательный аппарат 4 буксирует сверхлегкий водяной рукав 6 и запускается с опорной платформы 3, так что беспилотный летательный аппарат 4 реализует определенную операцию запуска и операцию приближения к объекту, который должен подвергаться пожаротушению, посредством использования действий раскладывания опоры 2 стрелы, что уменьшает расстояние полета беспилотного летательного аппарата 4, экономит электрическую мощность беспилотного летательного аппарата 4 и позволяет беспилотному летательному аппарату 4 выполнять задачу по пожаротушению в течение большего времени. Помимо этого, посредством системы пожаротушения с помощью сжатой воздушной пены традиционной пожарной машины с подъемником и базирования на переносном трубопроводе 5, беспилотный летательный аппарат 4 запускается с небольшим расходом огнегасящего агента и приближается для пожаротушения.
[00102] Кроме того, пожарная машина согласно вариантам осуществления настоящего раскрытия сущности также имеет характеристики высокой маневренности, хорошей адаптируемости к площадке, большей рабочей высоты и пролета и более высокой скорости развития операции пожаротушения на большой высоте. Согласно несущей способности существующего электрического беспилотного летательного аппарата в 50 кг, задачи по спасению при пожарах в высотных зданиях ниже 120 м охватываются посредством надежной буксировки водяного рукава с диаметром ≥DN40 для 60-80 м. За счет технического прогресса, когда более надежный беспилотный летательный аппарат 4 предоставляет большую несущую способность, эта технология реализует буксировку водяного рукава 6 с большей длиной или диаметром, за счет этого достигая большего рабочего диапазона. Технология адаптируется к локальным условиям. Пожаротушение на небольшой высоте приспосабливает режим пожаротушения с помощью подъемника пожарной машины, пожаротушение на большой высоте приспосабливает режим пожаротушения с помощью соединенного беспилотного летательного аппарата, и большая гибкость и удобство реализуются посредством приспособления различных способов к приближению к спасаемому объекту.
[00103] Помимо этого, пожарная машина согласно вариантам осуществления настоящего раскрытия сущности имеет более долговечную и мощную огнегасящую способность по сравнению с существующими беспилотными летательными аппаратами, которые независимо переносят противопожарные бомбы или распыляют огнегасящие агенты. Непрерывное пожаротушение может реализовываться посредством большого расхода ниже 60 метров и посредством небольшого расхода выше 60 метров. По сравнению с существующим режимом, в котором беспилотные летательные аппараты сбрасывают водяные рукава, чтобы помогать пожаротушению высотных зданий с помощью городских основных боевых пожарных машин, пожарная машина согласно вариантам осуществления настоящего раскрытия сущности имеет маневренность и гибкость работы на большой высоте.
[00104] Ссылаясь на фиг. 6 и фиг. 7, варианты осуществления настоящего раскрытия сущности также предоставляют способ управления пожаротушением для пожарной машины, которая реализуется посредством пожарной машины согласно любому техническому решению настоящего раскрытия сущности. На предмет реализации пожарной машины, обратитесь к вышеприведенному, что подробно не повторяется здесь. Способ управления пожаротушением для пожарной машины имеет два рабочих режима: первый режим представляет собой режим пожаротушения с помощью подъемника пожарной машины, и второй режим представляет собой режим пожаротушения с помощью соединенного беспилотного летательного аппарата. Фиг. 6 иллюстрирует различные параметры в двух режимах. Как представлено выше, в двух различных рабочих режимах пожаротушения, стратегия управления и требования по управлению пожарной машины с подъемником для системного узла пожаротушения с помощью сжатой воздушной пены, модуля регулирования клапанов и модуля управления безопасными рабочими положениями отличаются. Диапазон изменения времен N1 пенообразования составляет 5-15 раз, и диапазон изменения N2 составляет 6-8 раз; диапазон изменения расхода Q1 пенообразующей жидкой смеси составляет 8-20 литров/секунда, и диапазон изменения Q2 составляет 1-5 литров/секунда; давление пены Р2>Р1. Состояния переключения первого регулирующего клапана 18 и второго регулирующего клапана 19 являются противоположными.
[00105] Ссылаясь на фиг. 7, способ управления пожаротушением для пожарной машины включает в себя следующие этапы:
[00106] Этап S100: удовлетворяется или нет условие для пожаротушения с помощью соединенного беспилотного летательного аппарата.
[00107] Опора 2 стрелы пожарной машины имеет первое положение и второе положение. Первое положение должно использовать пожарный гидрант 7 пожарной машины для пожаротушения отдельно. В первом положении, опора 2 стрелы является свободной для варьирования амплитуды, и предельная кривая безопасного рабочего диапазона в режиме пожаротушения с помощью подъемника представляет собой S1. Второе положение должно использовать беспилотный летательный аппарат для пожаротушения отдельно. Во втором положении, опора 2 стрелы остается неподвижной, и опора 2 стрелы ограничена пределами диапазона предельной кривой S2 в стандартном рабочем положении, требуемом во время операции соединения. Так называемое условие включает в себя определение того, находится или нет опора 2 стрелы в пределах диапазона предельной кривой S2 в стандартном рабочем положении, требуемом во время операции соединения. Конкретная операция заключается в следующем: в основной консоли 11 в поворотной площадке пожарной машины с подъемником, комбинированная опора стрелы работает с возможностью достигать предельной кривой S2 в небольшом диапазоне в стандартном рабочем положении, требуемом для операции соединения беспилотного летательного аппарата 4, и затем кнопка переключения режима нажимается для режима пожаротушения с помощью соединенного беспилотного летательного аппарата.
[00108] Этап S200: беспилотный летательный аппарат 4 и опорная платформа 3 пожарной машины расстопорятся, если условие для пожаротушения с помощью беспилотного летательного аппарата удовлетворяется. На предмет конкретной реализации беспилотного летательного аппарата 4 и режима соединения между беспилотным летательным аппаратом 4 и опорной платформой 3, обратитесь к контенту, представленному выше, что подробно не повторяется здесь.
[00109] Этап S300: беспилотный летательный аппарат 4 приводится в движение, чтобы взлетать с опорной платформы 3 вместе с водяным рукавом 6. На предмет конкретного режима управления, состояний соответствующих модулей управления и связанных состояний первого регулирующего клапана 18 и второго регулирующего клапана 19, обратитесь к контенту, представленному выше, что подробно не повторяется здесь.
[00110] Перед вышеприведенным этапом S300, способ управления пожаротушением для пожарной машины дополнительно может включать в себя следующий этап: открытие нижней пластины устройства 9 хранения под опорной платформой 3, чтобы укладывать водяной рукав 6, так что водяной рукав 6 более не перекрывается.
[00111] Вышеприведенный этап S200 может, в частности, разделяться на следующие этапы: приведение в движение беспилотного летательного аппарата 4, чтобы взлетать с опорной платформы 3 вместе с водяным рукавом 6 в позицию нависания, с тем чтобы ожидать подачи и транспортировки огнегасящего агента.
[00112] Этап S400: огнегасящий агент транспортируется в водяной рукав 6, и беспилотный летательный аппарат 4 переносит водяной рукав 6, заполненный огнегасящим агентом, и летит в позицию, которая должна подвергаться пожаротушению, с тем чтобы реализовывать пожаротушение посредством беспилотного летательного аппарата 4.
[00113] Вышеприведенный этап S400, в частности, включает в себя следующие этапы: транспортировка огнегасящего агента в водяной рукав; после стабильной транспортировки огнегасящего агента, обеспечение возможности беспилотному летательному аппарату переносить водяной рукав, заполненный огнегасящим агентом, и лететь в позицию, которая должна подвергаться пожаротушению.
[00114] В процессе выполнения вышеприведенного этапа S400, следующие этапы одновременно выполняются: определение расстояния беспилотного летательного аппарата 4 относительно опорной платформы 3 в реальном времени; если расстояние между беспилотным летательным аппаратом 4 и опорной платформой 3 превышает заданное значение, регулирование позиции беспилотного летательного аппарата 4 работе в воздухе, так что расстояние между беспилотным летательным аппаратом 4 и опорной платформой 3 не превышает заданное значение.
[00115] В некоторых вариантах осуществления, расстояние составляет D, и D<L-Δε; при этом Δε является максимальным отклонением позиционирования беспилотного летательного аппарата 4 в горизонтальном или вертикальном направлении на основе IMU-блока инерциальных измерений и системы GPS-позиционирования по сути. L является длиной, на которую водяному рукаву 6 разрешается эффективно буксироваться, и Δε является максимальным отклонением позиционирования беспилотного летательного аппарата 4 в горизонтальном или вертикальном направлении на основе IMU-блока инерциальных измерений и его системы GPS-позиционирования. После того как расстояние полета беспилотного летательного аппарата 4 от центра платформы для взлета составляет близко к D-значению, система управления полетом беспилотного летательного аппарата 4 автоматически ограничивает дальнейший полет беспилотного летательного аппарата и разрешает беспилотному летательному аппарату лететь только на уменьшенное расстояние.
[00116] В процессе пожаротушения с помощью беспилотного летательного аппарата 4, водяной рукав 6 всегда буксируется, и длина водяного рукава 6 является определенной. Следовательно, расстояние между беспилотным летательным аппаратом 4 и опорной платформой 3 не должно превышать длину водяного рукава 6, ив некоторых вариантах осуществления, расстояние не должно превышать 80% длины водяного рукава 6, так что надежное соединение может поддерживаться между беспилотным летательным аппаратом 4 и водяным рукавом 6, с тем чтобы эффективно транспортировать огнегасящий агент. Кроме того, вероятность других опасных ситуаций, поскольку беспилотный летательный аппарат 4 находится на слишком большом расстоянии от опорной платформы 3, уменьшается.
[00117] В процессе выполнения вышеприведенного этапа S400, следующие этапы также выполняются одновременно: определение того, беспилотный летательный аппарат 4 завершает пожаротушение или имеет анормальные ситуации либо нет; если беспилотный летательный аппарат 4 завершает пожаротушение или имеет анормальные ситуации, стопорящее устройство 15 с электрическим управлением в нижнем конце водяного рукава 6 отсоединяется, и огнегасящий агент в водяном рукаве 6 высвобождается, чтобы управлять беспилотным летательным аппаратом 4 таким образом, что он летит с пустым водяным рукавом б.
[00118] В некоторых вариантах осуществления, анормальные ситуации включают в себя, по меньшей мере, одно из следующего: мощность беспилотного летательного аппарата 4 является недостаточной, нагрузка беспилотного летательного аппарата 4 превышает заданное значение, и скорость ветра в окружении, в котором расположен беспилотный летательный аппарат 4, превышает скорость ветра при номинальных потерях.
[00119] Перед взлетом и в процессе полета беспилотного летательного аппарата 4, способ управления пожаротушением для пожарной машины дополнительно включает в себя следующие этапы: модуль передачи данных беспилотного летательного аппарата передает параметры состояния и предварительно установленные параметры беспилотного летательного аппарата в модуль обработки данных, установленный в опорной платформе или хвостовом конце опоры стрелы пожарной машины; согласно параметрам состояния беспилотного летательного аппарата, полученным посредством модуля обработки данных, и предварительно установленным параметрам беспилотного летательного аппарата, консоль беспилотного летательного аппарата управляет полетом беспилотного летательного аппарата, транспортируемым количеством огнегасящего агента и/или тем, следует или нет транспортировать огнегасящий агент, либо тем, следует или нет разгружать огнегасящий агент в трубопроводе, с тем чтобы обеспечивать то, что беспилотный летательный аппарат не разбивается вследствие чрезмерной буксировки. На предмет задания позиций и конкретных рабочих режимов соответствующих компонентов, обратитесь к контенту, представленному выше.
[00120] В некоторых вариантах осуществления, предварительно установленные параметры беспилотного летательного аппарата включают в себя, по меньшей мере, одно из следующего: предварительно определенная нагрузочная способность беспилотного летательного аппарата, предельное значение беспилотного летательного аппарата в отношении скорости окружающего ветра и заданное расстояние, дозволенное беспилотному летательному аппарату от точки взлета.
[00121] С дальнейшей ссылкой на фиг. 6 и фиг. 7, способ управления пожаротушением для пожарной машины дополнительно включает в себя следующие этапы:
[00122] S500: беспилотный летательный аппарат 4 работает с возможностью осуществлять посадку на землю.
[00123] S600: пожарная машина работает с возможностью восстанавливаться из развернутого состояния в состояние движения. На предмет подробностей контента, обратитесь к вышеприведенному описанию, что подробно не повторяется здесь.
[00124] Согласно способу управления пожаротушением, предоставленному посредством вышеуказанных технических решений, приспосабливается мало- или среднегабаритная пожарная машина с высотой в 40-50 метров, и сверхлегкий водяной рукав 6 с высотой в 60-80 метров буксируется посредством беспилотного летательного аппарата 4, так что пожары в высотных зданиях с более высоким количеством метров и большим пролетом эффективно, гибко и экономично тушатся. По сравнению с существующими крупномасштабными пожарными машинами с подъемником, затраты на оборудование по сути и последующие затраты на техническое обслуживание значительно уменьшаются.
[00125] В описаниях настоящего раскрытия сущности, следует понимать, что ориентация или позиционные взаимосвязи, указываемые посредством таких терминов, как "центральный", "продольный", "поперечный", "передний", "задний", "левый ", "правый", "вертикальный", "горизонтальный", "верхний", "нижний", "внутренний" и "внешний", основаны на ориентации или позиционных взаимосвязях, показанных на чертежах, только для целей простоты при описании настоящего раскрытия сущности и упрощения ее описаний, а не для указания или подразумевания того, что указанное устройство или элемент, в частности, должен находиться и конструироваться и работать в конкретном направлении, и в силу этого не должны пониматься как ограничения на объем охраны настоящего раскрытия сущности.
[00126] В завершение, следует отметить, что вышеуказанные варианты осуществления используются только для иллюстрации, а не для ограничения технических решений настоящего раскрытия сущности; хотя настоящее раскрытие сущности подробно описано со ссылкой на предпочтительные варианты осуществления, специалисты в данной области техники должны понимать, что модификации по-прежнему могут вноситься в конкретные варианты осуществления настоящего раскрытия сущности, или эквивалентные замены могут вноситься в часть технических признаков; и без отступления от сущности технических решений настоящего раскрытия сущности, модификации и эквивалентные замены должны включаться в объем технических решений, заявленный в настоящем раскрытии сущности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ТУШЕНИЯ ПОЖАРОВ ВЫСОТНЫХ ЗДАНИЙ И ПОЖАРОВЗРЫВООПАСНЫХ ТЕХНОЛОГИЧЕСКИХ УСТАНОВОК | 2019 |
|
RU2711267C1 |
| Противопожарная насосно-рукавная система | 2019 |
|
RU2722615C1 |
| Средство тушения пожаров высотных зданий (варианты) | 2023 |
|
RU2802658C1 |
| Насадок с генераторами пены для автомеханической пожарной лестницы | 2020 |
|
RU2751894C1 |
| Насадок для автомеханической пожарной лестницы с поворачивающимися генераторами пены средней кратности | 2020 |
|
RU2751296C1 |
| Насадок для автомеханической пожарной лестницы с генераторами пены средней кратности и дистанционным управлением | 2020 |
|
RU2751892C1 |
| УСТРОЙСТВО ДЛЯ ТУШЕНИЯ ПОЖАРОВ В ВЫСОТНЫХ ЗДАНИЯХ | 2015 |
|
RU2605986C2 |
| Многофункциональная пожарная машина, оборудованная распылителем жидкого азота в качестве средства для пожаротушения | 2018 |
|
RU2759001C1 |
| УСТАНОВКА ДЛЯ ПОЖАРОТУШЕНИЯ | 2003 |
|
RU2236876C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
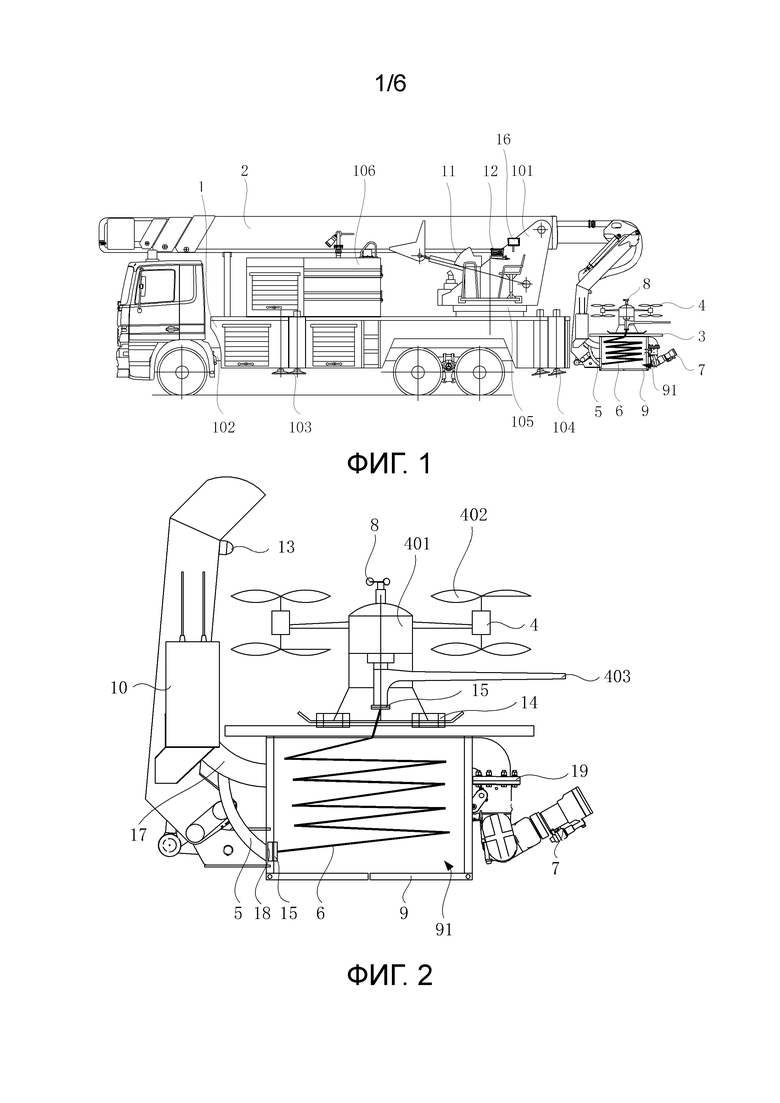
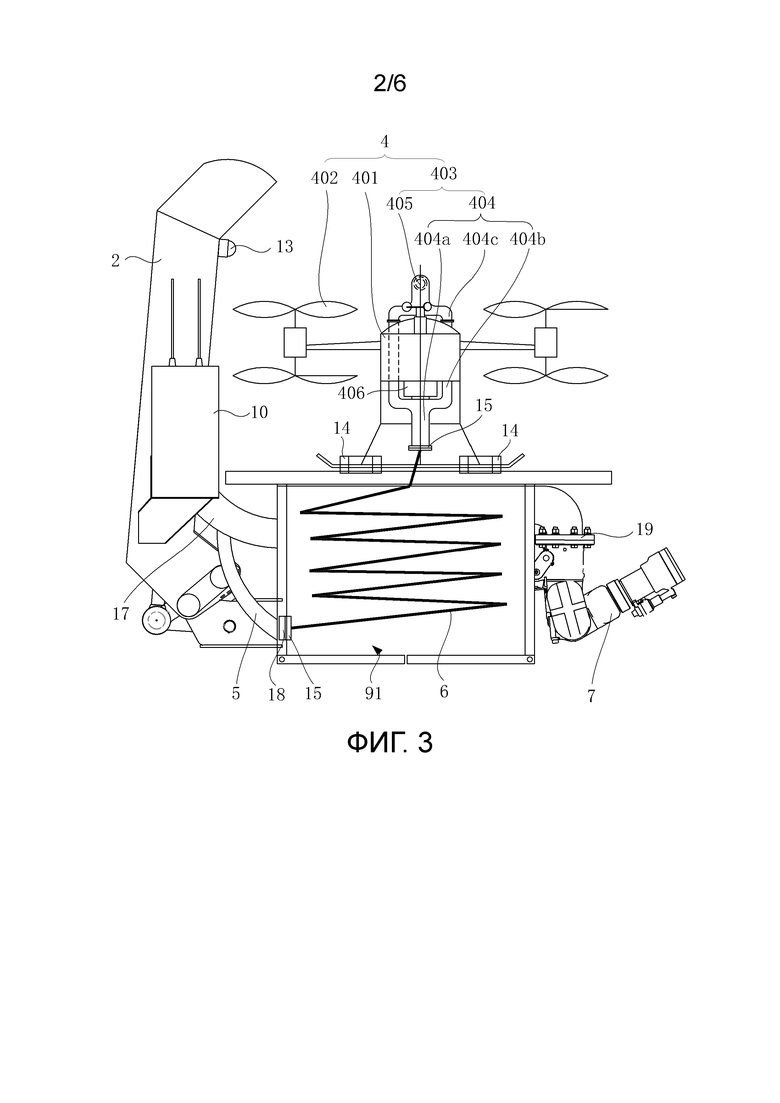
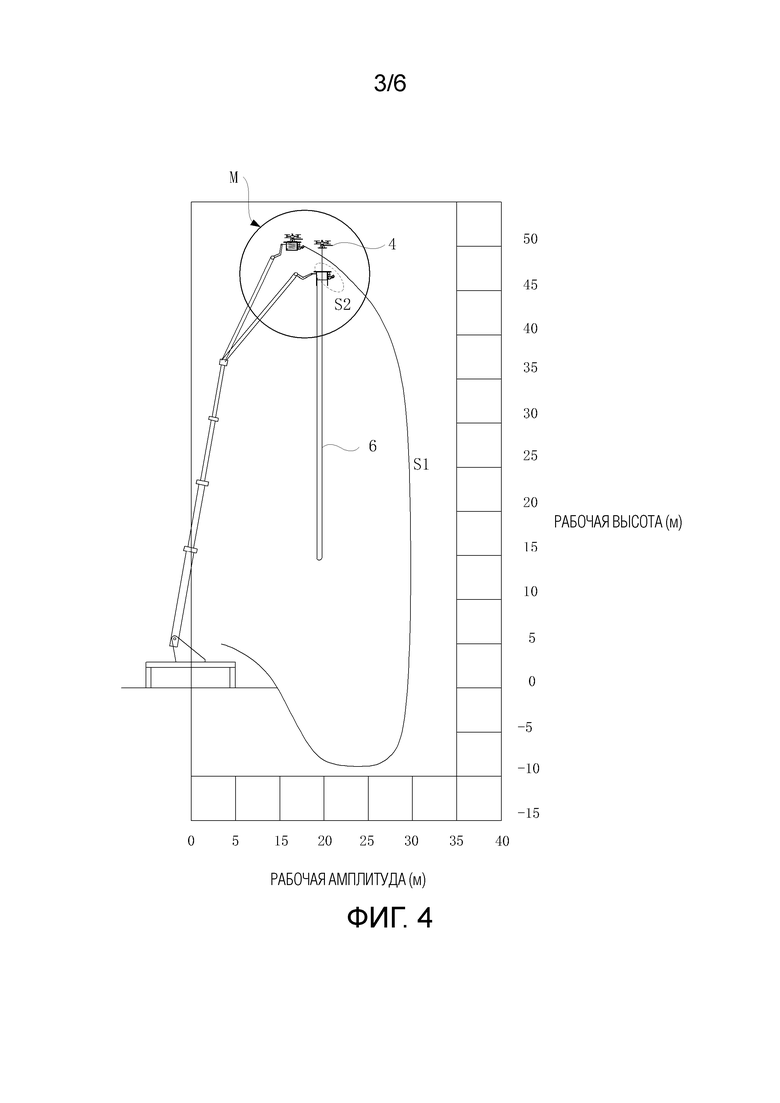
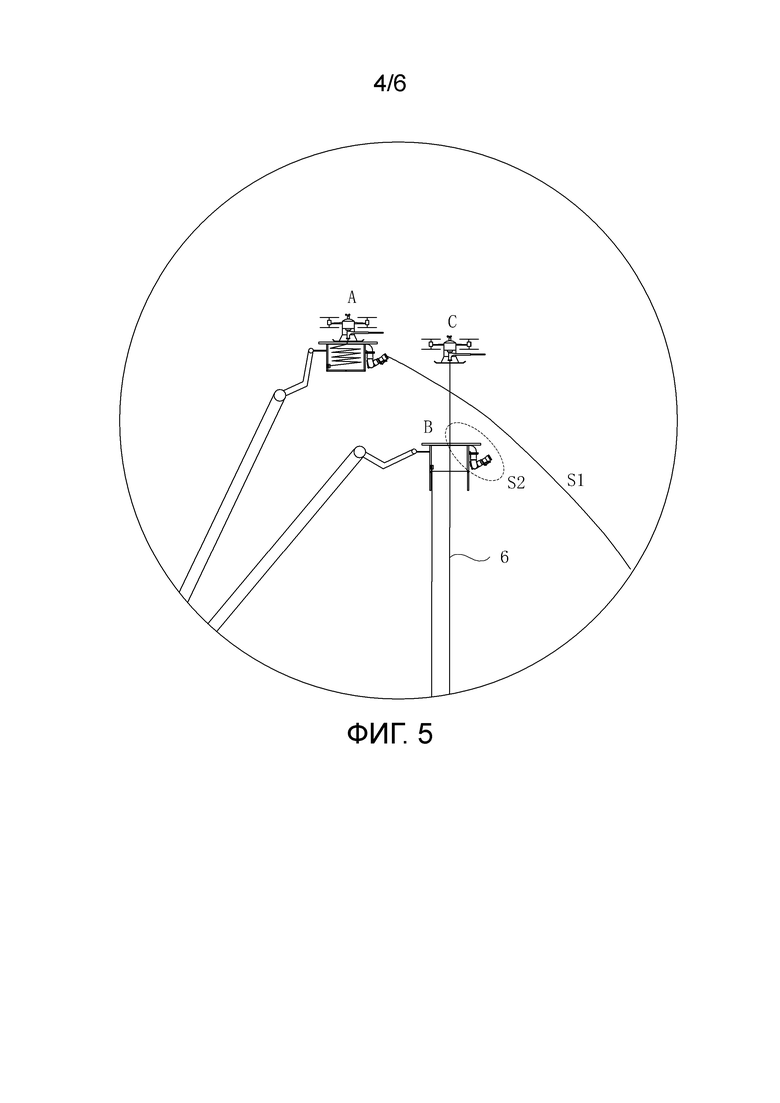
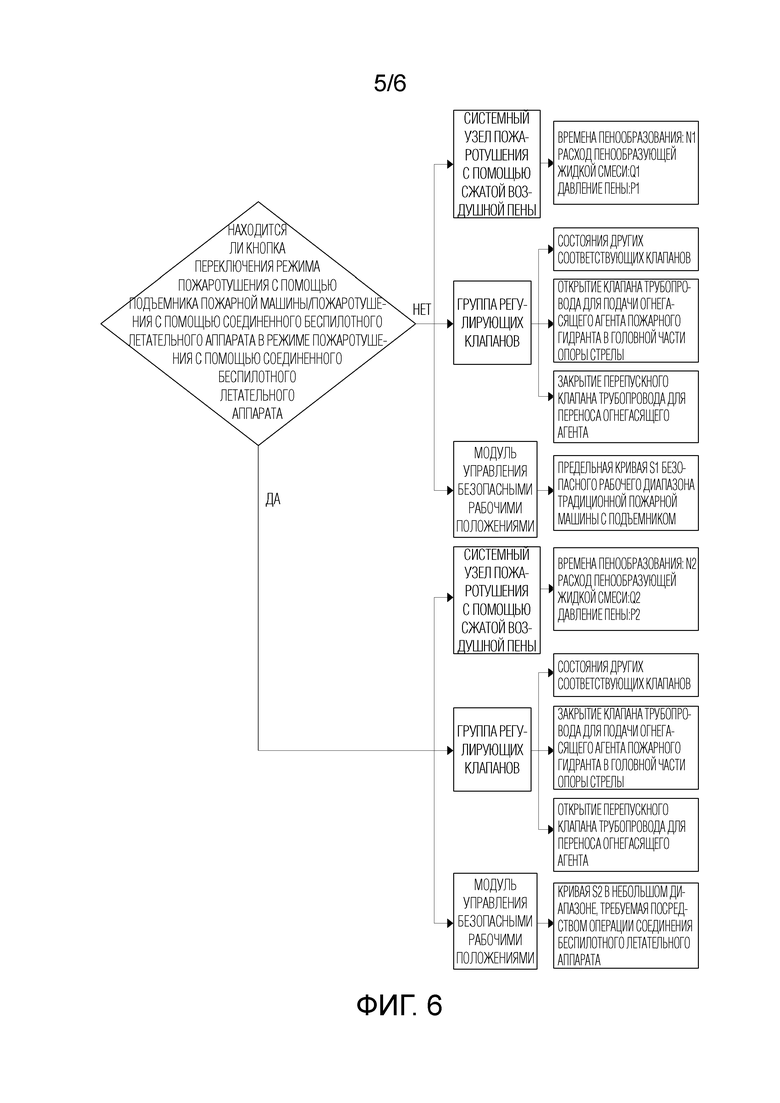
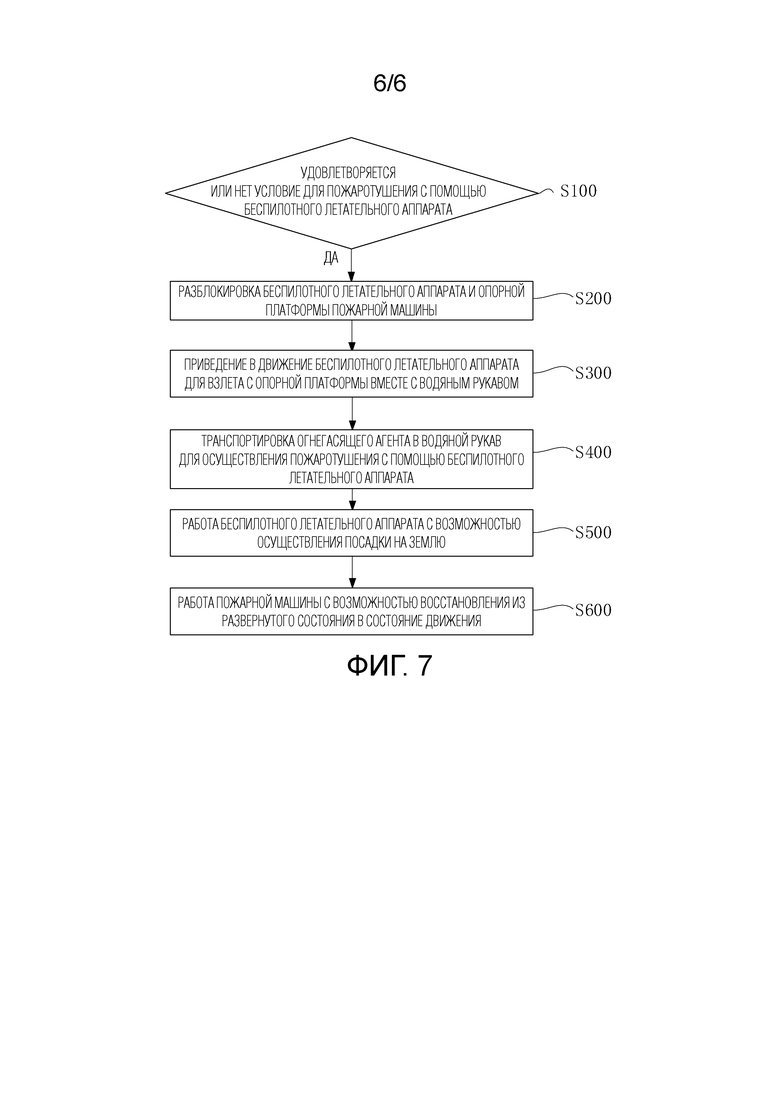
Изобретение относится к пожарной машине. Пожарная машина включает в себя кузов (1), опору (2) стрелы, опорную платформу (3), беспилотный летательный аппарат (4), переносной трубопровод (5) и водяной рукав (6). Опорная платформа (3) устанавливается в хвостовом конце опоры (2) стрелы. Беспилотный летательный аппарат (4) устанавливается на опорной платформе (3). Переносной трубопровод (5) устанавливается на опоре (2) стрелы. Один конец водяного рукава (6) находится в сообщении по текучей среде с переносным трубопроводом (5), а другой конец водяного рукава (6) соединен с возможностью отсоединения с беспилотным летательным аппаратом (4). Достигается возможность пожаротушения на большой высоте и улучшения огнегасящей способности. 15 з.п. ф-лы, 7 ил.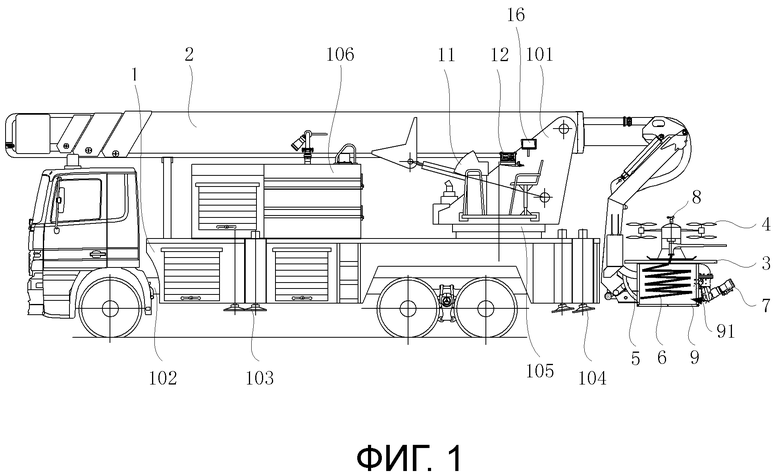
1. Пожарная машина, содержащая:
- кузов (1) машины, выполненный с возможностью быть проходимым;
- раму (2) стрелы, размещенную на кузове (1) машины;
- опорную платформу (3), размещенную в хвостовом конце опоры (2) стрелы;
- беспилотный летательный аппарат (4), размещенный на опорной платформе (3);
- переносной трубопровод (5), размещенный на опоре (2) стрелы; и
- водяной рукав (6), один конец которого находится в сообщении по текучей среде с переносным трубопроводом (5) и другой конец которого соединен с возможностью отсоединения с беспилотным летательным аппаратом (4).
2. Пожарная машина по п. 1, дополнительно содержащая:
- пожарный гидрант (7), расположенный на опорной платформе (3); и
- противопожарный трубопровод (17), находящийся в сообщении по текучей среде с пожарным гидрантом (7).
3. Пожарная машина по п. 2, дополнительно содержащая:
- первый регулирующий клапан (18), расположенный на переносном трубопроводе (5) и выполненный с возможностью контроля, открыт ли переносной трубопровод (5); и
- второй регулирующий клапан (19), расположенный на противопожарном трубопроводе (17) и выполненный с возможностью контроля, открыт ли противопожарный трубопровод (17);
- при этом рабочее состояние первого регулирующего клапана (18) и рабочее состояние второго регулирующего клапана (19) являются противоположными.
4. Пожарная машина по любому из пп. 1-3, дополнительно содержащая:
- устройство (9) хранения, размещенное в нижней части опорной платформы (3), при этом устройство (9) хранения содержит полость (91) для хранения; один конец водяного рукава (6) находится в сообщении по текучей среде с переносным трубопроводом (5), другой конец водяного рукава (6) находится в сообщении по текучей среде с транспортирующей трубой (404) беспилотного летательного аппарата (4), и средняя часть водяного рукава (6) сложена и размещена в полости (91) для хранения; при этом нижняя часть устройства (9) хранения выполнена с возможностью быть открываемой и закрываемой.
5. Пожарная машина по любому из пп. 1-4, в которой опора (2) стрелы выполнена с возможностью находиться в первом положении и втором положении; при этом в первом положении пожарный гидрант (7) пожарной машины используется для пожаротушения, а опора (2) стрелы является свободной для изменения амплитуды; во втором положении опора (2) стрелы остается неподвижной, а беспилотный летательный аппарат (4) используется для пожаротушения.
6. Пожарная машина по любому из пп. 1-5, дополнительно содержащая:
- модуль (10) обработки данных, установленный в опорной платформе (3) или верхнем конце опоры (2) стрелы, при этом беспилотный летательный аппарат (4) содержит модуль передачи данных, а модуль (10) обработки данных находится в сообщении с модулем передачи данных беспроводным способом; и
- консоль (12) беспилотного летательного аппарата, находящуюся в сообщении с модулем (10) обработки данных и выполненную с возможностью управления полетом беспилотного летательного аппарата, транспортируемым количеством огнегасящего агента и/или с возможностью определения, следует ли транспортировать огнегасящий агент, либо следует разгрузить огнегасящий агент в трубопровод в соответствии с параметрами состояния беспилотного летательного аппарата, передаваемыми посредством модуля передачи данных и полученными при помощи модуля (10) обработки данных, а также в соответствии с предварительно установленными параметрами беспилотного летательного аппарата таким образом, чтобы предотвратить поломку беспилотного летательного аппарата вследствие чрезмерной буксировки.
7. Пожарная машина по п. 6, в которой предварительно установленные параметры беспилотного летательного аппарата (4) содержат по меньшей мере одно из следующего: предварительно определенная нагрузочная способность беспилотного летательного аппарата (4), предельное значение беспилотного летательного аппарата (4) в отношении скорости окружающего ветра и заданное расстояние, дозволенное беспилотному летательному аппарату (4) от точки взлета.
8. Пожарная машина по п. 6 или 7, в которой консоль (12) беспилотного летательного аппарата установлена на кузове (1) машины.
9. Пожарная машина по любому из пп. 1-8, дополнительно содержащая:
- камеру (13), размещенную на верхнем конце опоры (2) стрелы или опорной платформы (3), при этом камера (13) выполнена с возможностью отслеживания информации о помехах при взлете беспилотного летательного аппарата (4).
10. Пожарная машина по любому из пп. 1-9, дополнительно содержащая:
- запирающий механизм (14), установленный на опорной платформе (3) с возможностью закрепления беспилотного летательного аппарата (4) и опорной платформы (3).
11. Пожарная машина по любому из пп. 1-10, в которой верхний конец переносного трубопровода (5) проходит в опорную платформу (3), а нижний конец переносного трубопровода (5) расположен в кузове (1) машины.
12. Пожарная машина по любому из пп. 1-11, в которой беспилотный летательный аппарат (4) содержит:
- корпус (401);
- множество вращающихся крыльев (402), каждое из которых расположено на верхней части корпуса (401); и
- устройство (403) распыления огнегасящего агента, содержащее транспортирующую трубу (404) и распыляющую трубу (405), при этом транспортирующая труба (404) проникает из нижней части корпуса (401) в верхнюю часть корпуса (401), при этом распыляющая труба (405) находится в сообщении по текучей среде с транспортирующей трубой (404) и распыляющая труба (405) располагается выше положения вращающихся крыльев (402).
13. Пожарная машина по п. 12, в которой транспортирующая труба (404) содержит:
- первый трубопровод (404а), расположенный ниже корпуса (401);
- вторые трубопроводы (404b), расположенные ниже по ходу потока относительно первого трубопровода (404а) и находящиеся в сообщении по текучей среде с первым трубопроводом (404а), в котором располагаются по меньшей мере два вторых трубопровода (404b), и при этом соответствующие вторые трубопроводы (404b) располагаются симметрично относительно центральной оси корпуса (401); и
- третий трубопровод (404с), расположенный ниже по ходу потока относительно соответствующих вторых трубопроводов (404b) и находящийся в сообщении по текучей среде с соответствующими вторыми трубопроводами (404b).
14. Пожарная машина по п. 13, дополнительно содержащая:
- два стопорных устройства (15) с электрическим управлением, при этом одно стопорное устройство (15) с электрическим управлением расположено на переносном трубопроводе (5) с возможностью блокировки и разблокировки одного конца водяного рукава (6) и переносного трубопровода (5); при этом другое стопорное устройство (15) с электрическим управлением расположено на другом конце первого трубопровода (404а) для блокировки и разблокировки первого трубопровода (404а) и верхнего конца водяного рукава (6).
15. Пожарная машина по любому из пп. 1-14, дополнительно содержащая:
- системный узел (106) пожаротушения с помощью сжатой воздушной пены, который установлен на кузове (1) машины и находится в сообщении по текучей среде с переносным трубопроводом (5) таким образом, чтобы транспортировать огнегасящий агент в переносной трубопровод (5); при этом системный узел (106) пожаротушения с помощью сжатой воздушной пены выполнен с возможностью приготовления пенообразующего огнегасящего агента, имеющего заданные параметры.
16. Пожарная машина по п. 15, в которой заданные параметры включают в себя по меньшей мере одно из следующего: время пенообразования, расход пенообразующей жидкой смеси и давление пены.
| CN 109289139 A, 01.02.2019 | |||
| CN 202459913 U, 03.10.2012 | |||
| УСТРОЙСТВО И СПОСОБ ТУШЕНИЯ ПОЖАРОВ ВЫСОТНЫХ ЗДАНИЙ И ПОЖАРОВЗРЫВООПАСНЫХ ТЕХНОЛОГИЧЕСКИХ УСТАНОВОК | 2019 |
|
RU2711267C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |

