Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления многорежимными газотурбинными двухконтурными двигателями (ГТД) с регулируемым критическим сечением реактивного сопла.
Из уровня техники известен способ управления площадью критического сечения реактивного сопла двухконтурного газотурбинного двигателя, включающий снятие параметров давления газов за компрессором и за турбиной, определение по их показателям степени расширения газа на турбине, сравнение данного параметра с его программным значением и подачу выработанного управляющего сигнала на исполнительный механизм для регулирования площади критического сечения реактивного сопла, программное значение площади критического сечения определяют как сумму программных значений степени расширения газа на турбине и приведенной частоты вращения ротора низкого давления, причем программное значение степени расширения газа на турбине корректируют в зависимости от температуры воздуха на входе в двигатель, а программное значение приведенной частоты вращения получают в результате сравнения значения частоты вращения ротора низкого давления и сигнала его программного значения, который получают как сумму программного значения частоты вращения ротора низкого давления в зависимости от температуры воздуха на входе в двигатель и положения рычага управления двигателем.
(патент RU 2443890 C1, 27.02.2012 г.)
В результате анализа известного способа необходимо отметить, указанный способ в процессе работы двигателя на установившихся режимах работы поддерживает заданное скольжение роторов двигателя, а контур поддержания заданной степени расширения газа на турбинах компенсирует возмущения по газовоздушному тракту, например, при включении в работу форсажной камеры сгорания. По мере выработки ресурса скольжение роторов двигателя снижается (частота вращения ротора низкого давления снижается быстрее частоты вращения ротора высокого давления), а регулятор будет поддерживать его на заданном уровне, увеличивая площадь сечения критического сопла (для увеличения частоты вращения ротора низкого давления до номинального уровня), что приведет к дополнительному снижению тяги двигателя.
Для поддержания заданной степени расширения газов на турбинах необходимы прецизионные датчики давления, реализованные с применением электронных компонентов, из-за чего возможны параметрические отказы датчиков, которые не всегда обнаруживаются методом допускового контроля.
Необнаруженный отказ может привести к кратковременному недопустимому снижению степени расширения газов и, как следствие, к помпажу двигателя - быстродействия регулятора скольжения недостаточно для быстрой компенсации недостоверной информации.
Задачей изобретения является повышение надежности работы двигателя при параметрических отказах датчиков давления воздуха, выбор закона управления исключающий дополнительное снижение тяги двигателя по мере выработки ресурса.
Техническим результатом настоящего изобретения является повышение надежности системы управления, обеспечение поддержания заданного режима работы компрессора низкого давления при параметрических отказах датчиков давления и исключение дополнительного снижения тяги по мере выработки ресурса.
Указанный технический результат достигается в способе управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя, согласно которому измеряют частоты вращения роторов двигателя и определяют их отношение (S), определяют отношение давления воздуха за компрессором высокого давления к давлению газа за турбиной низкого давления двумя каналами измерения (7tTi и лТ2), определяют минимальное (7tTmin) и максимальное (лТтах) значения из величин 7cTi и лТ2, формируют заданное отношение давлений (ятзадХ расчетным путем формируют номинальное отношение частот вращения роторов двигателя (Sном) в зависимости от приведенной частоты вращения ротора компрессора высокого давления, формируют величину отклонения текущего отношения частот вращения роторов двигателя от номинального (ΔS=S-Sном), если величина AS меньше порога срабатывания компаратора, регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения 7сТтах от 7сТзад для парирования отклонения, при превышении величиной AS заранее выбранного порога регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения 7ГТтах от Лтзад.
Используют двигатель, оснащенный регулируемыми направляющими аппаратами компрессора низкого давления и номинальное отношение частот вращения роторов корректируют в зависимости от их положения.
Предпочтительно, используют двигатель, оснащенный регулируемыми направляющими аппаратами компрессора высокого давления и номинальное отношение частот вращения роторов корректируют в зависимости от их положения или двигатель, оснащенный противообледенительной системой с отбором воздуха из компрессора двигателя и номинальное отношение частот вращения роторов корректируют в зависимости состояния ее работы или двигатель, оснащенный системой охлаждения турбины с отбором охлаждающего воздуха из компрессора газотурбинного двигателя и номинальное отношение частот вращения роторов корректируют в зависимости состояния ее работы.
Сформированное расчетным путем отношение частот вращения роторов двигателя уточняют при испытаниях двигателя.
Заявленное изобретение поясняется следующим подробным описанием его осуществления со ссылкой на фигуру 1, на которой представлена схема системы управления ГТД.
Система управления для реализации заявленного способа содержит блок 1 измерения параметров работы ГТД 2, а именно: температуры воздуха Твх на входе в двигатель, частот вращения роторов компрессора низкого давления (КНД) ni и высокого давления (КВД) п2, отношения давления воздуха за компрессором высокого давления к давлению газа за турбиной низкого давления, сформированных двумя каналами измерения (πT1 и πT2).
Блок 1 формирует πТ1 как отношение давления воздуха Рквд за компрессором высокого давления к давлению газа Ртнд за турбиной низкого давления, измеренных первой парой датчиков, а тг2 - как отношения тех же параметров, измеренных второй парой датчиков:
Система содержит задатчик 3 для формирования заданного значения лтзад степени расширения (понижения давления) газов на турбине, например, в зависимости от температуры на входе в двигатель:
К входу задатчика 3 подключен выход датчика температуры воздуха Твх на входе в двигатель блока 1 (для облегчения чтения схемы подключения датчиков показаны условно).
Система содержит селекторы минимального 4 и максимального 5 уровня, к первым входам которых подключен сигнал πТ1 от блока 1, к вторым входам - сигнал πТ2 от блока 1. Выходы селекторов подключены к первому и второму входам управляемого переключателя 6.
Система содержит сумматор 7, к первому входу которого подключен выход задатчика 3, а ко второму (инвертирующему) входу - выход переключателя 6. Выход сумматора 7 подключен к входу регулятора 8 заданной степени расширения газов на турбине. Регулятор 8 формирует управляющий сигнал на привод 9, управляющий положением створок критического сечения реактивного сопла и соответственно меняющий площадь критического сечения реактивного сопла двигателя.
Система содержит делитель 10, формирующий текущее значение скольжения роторов. К первому входу делителя 10 подключен сигнал частоты вращения ротора КНД от блока 1, ко второму выходу - сигнал частоты вращения ротора КВД от блока 1.
Система содержит блок 11 вычисления приведенной частоты вращения ротора КВД, к первому входу которого подключен сигнал частоты вращения ротора КВД от блока 1, а ко второму - температуры воздуха на входе в двигатель от блока 1. Выход блока 11 подключен к входу блока 12 формирования номинального значения скольжения роторов двигателя.
Выход делителя 10 подключен к первому входу сумматора 13, ко второму (инвертирующему) входу которого подключен сигнал блока 12. Выход сумматора 13 подключен к компаратору 14. Компаратор 14 управляет состоянием переключателя 6.
Система для реализации заявленного способа может быть скомпонована из известных блоков и элементов.
В качестве датчиков могут быть использованы стандартные датчики контроля параметров работы ГТД, например, терморезистивные датчики температуры, тензорезистивные датчики давлений, индуктивные датчики частоты вращения.
Задатчики 3 и 12 являются устройствами реализации произвольных зависимостей и реализуют соответственно известные зависимости вида:
Управляемый переключатель 6 выбирается таким образом, что при подаче на его управляющий вход сигнала логической единицы он подключает к своему выходу сигнал со второго входа, иначе - к его выходу подключен первый вход. Переключатель является однократно переключаемым.
В качестве регулятора 8 может быть использован ПИД-регулятор.
В качестве привода 9 створок критического сечения реактивного сопла может быть использован известный привод с воздействием на распределительный золотник, задающий скорость перемещения гидроцилиндров створок реактивного сопла.
Блок 11 вычисления приведенной частоты вращения ротора КВД реализует известную функцию:
Использующиеся в системе делитель, селекторы минимального и максимального уровня, компаратор, сумматоры являются стандартными.
Порог срабатывания компаратора 14 выбирается расчетным путем и представляет собой допустимое отклонение текущего скольжения двигателя от номинального. Превышение данного порога сигнализирует о недопустимой потере тяги двигателем.
На скольжение роторов двигателя (отношение частот вращения роторов низкого и высокого давлений: n1/n2) влияют изменяемая механизация компрессора: положение направляющих аппаратов компрессоров низкого и высокого давлений, а так же отборы воздуха от компрессора в процессе его работы, например, на нужды противообледенительной системы, системы охлаждения турбины и т.д.. Все эти факторы могут быть учтены при расчете номинальной линии скольжения роторов.
Для их учета в систему могут быть добавлены измерители отклонения положения направляющих аппаратов компрессоров низкого и высокого давлений от их номинальных значений, анализ режимов работы противообледенительной системы и системы охлаждения турбины.
В общем виде номинальная линия скольжения может быть рассчитана в виде:

где:
К1 - коэффициент влияния на линию скольжения роторов каждого градуса отклонения от номинального значения направляющих аппаратов компрессора низкого давления, Ащ - соответственно, отклонение;
К2 - коэффициент влияния на линию скольжения роторов каждого градуса отклонения от номинального значения направляющих аппаратов компрессора высокого давления, Да2 - соответственно отклонение;
К3 - коэффициент влияния на линию скольжения роторов включения противообледенительной системы К3=0, если система выключена;
К4 - коэффициент влияния на линию скольжения роторов включения охлаждения турбины, К4=0, если охлаждение выключено.
В дальнейшем будем рассматривать вариант реализации системы управления, где номинальное скольжение роторов двигателя формируется блоком 12 по закону:
Номинальная зависимость скольжения роторов определяется расчетным путем и может быть скорректирована для каждого двигателя при приемосдаточных испытаниях.
Отклонение отношения частот вращения от выбранной зависимости определяет отклонение измеренной степени расширения газов на турбинах от фактического значения. Погрешность расчета отношения частот вращения не превышает 0,1%, что с учетом точности аппроксимации характеристик двигателя позволяет контролировать точность поддержания заданной степени расширения газов на турбинах с погрешностью не более (1,0…1,5)%, что достаточно для диагностики датчиков давления и исключения аварийных ситуаций во всей области эксплуатации двигателя.
Система работает следующим образом.
В процессе работы ГТД его параметры измеряются блоком 1.
В блоке 10 формируется текущее значение скольжения роторов двигателя как отношения частоты вращения ротора КНД к частоте вращения ротора КВД:
Задатчик 12 по вычисленной блоком 11 приведенной частоте вращения ротора КВД формирует номинальное значение скольжения роторов двигателя - Sном.
На сумматоре 13 происходит вычисление величины отклонения скольжения от его номинального значения:
При исправных датчиках давления скольжение роторов двигателя соответствует номинальному и величина ΔS меньше порога срабатывания компаратора 14. На выходе компаратора 14 формируется сигнал логического нуля, и к выходу переключателя 6 подключается его первый вход - сигнал селектора 4 минимального уровня.
На сумматоре 7 формируется отклонение текущего значения степени расширения газа на турбине от его минимального значения:
Регулятор 6 формирует сигнал на управление створками критического сечения сопла для парирования отклонения путем изменения их положения.
При изменении положения створок изменяются параметры работы ГТД, а именно давление за турбиной и частота вращения ротора КНД, а значит и скольжение роторов.
Регулирование двигателя производится по минимальному из отношений πТ1 и πT2 для того, чтобы обеспечить требуемые запасы устойчивости компрессора низкого давления в случае параметрического отказа датчика давления.
Рассмотрим работу системы при параметрических отказах датчиков давления воздуха и газа. В таблице 1 приведены возможные состояния системы.
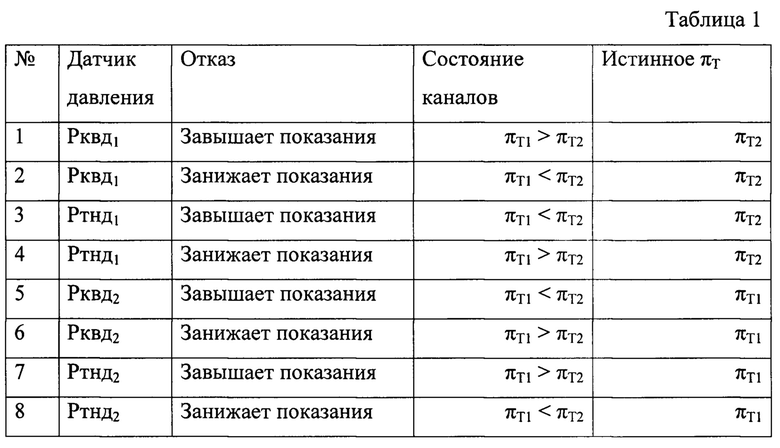
При параметрическом отказе, на выходе селектора 4 минимального уровня будет минимальное из двух значений πT1 и πT2. При этом в случаях отказов по пп. 1, 4, 5, 8 Таблицы 1 - это значение кт будет истинным, сформированным по исправным датчикам давления воздуха и газа. В этом случае скольжение роторов двигателя будет совпадать с номинальным и переключение компаратора 14 не произойдет.
В иных случаях, селектор 4 выберет значение неверного канала измерения, и регулятор 8 будет увеличивать площадь критического сечения сопла. По мере увеличения критического сечения реактивного сопла КНД будет разгружаться, частота вращения ротора КНД будет увеличиваться (при практически неизменной частоте вращения ротора КВД), что приведет к увеличению величины скольжения роторов двигателя S. При таком отказе тяга двигателя будет снижаться. Если продолжать управление по сигналам минимального значения щ, то снижение тяги может быть критическим.
При превышении величиной ΔS порога срабатывания компаратора 14, на его выходе сформируется сигнал логической единицы, который изменит состояние переключателя 6 - к его выходу окажется подключен его второй вход. И регулятор 8 начнет управлять критическим сечением реактивного сопла по сигналу селектора 5 максимального уровня. Что приведет к восстановлению нормальной работы двигателя: поддержанию действительного значения расширения газа на турбине, восстановлению линии скольжения и тяги двигателя.
Дополнительно следует отметить, что скольжение роторов двигателей может отличаться из-за разбросов механических характеристик узлов. Для повышения точности работы системы в части диагностики параметрических отказов линия скольжения двигателя может быть уточнена при приемосдаточных испытаниях, а так же по мере выработки ресурса двигателем при выполнении регламентных работ.
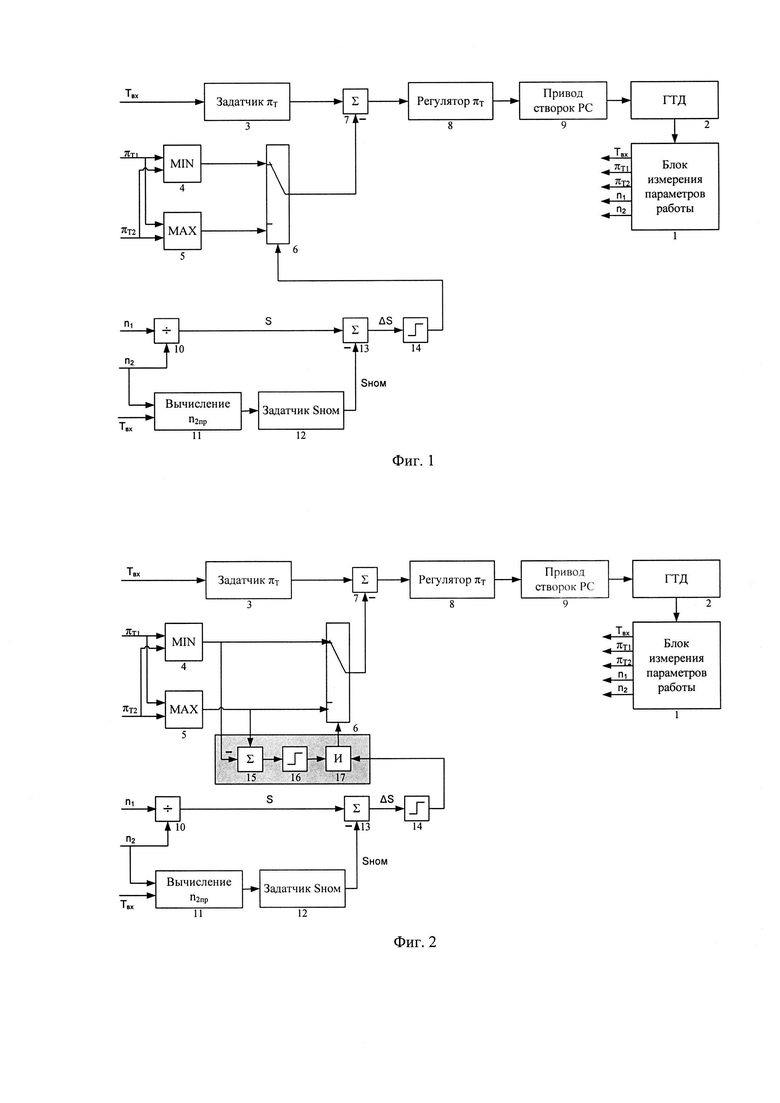
Для исключения ложного срабатывания переключения, в случае неверного формирования блоком 12 номинального значения скольжения роторов, система может быть дополнительно оснащена сумматором 15, компаратором 16 и логическим элементом «И» 17 (см. фиг. 2).
К первому входу сумматора 15 подключен сигнал селектора 5 максимального уровня, к второму (инвертирующему) входу - сигнал селектора 4 минимального уровня. Выход сумматора 15 подключены к входу компаратора 16. Выходы компараторов 14 и 16 подключены к входу логического элемента «И», который управляет состоянием переключателя 4.
Работа системы аналогична описанной выше, но для переключения на работу по максимальному значения параметра πT2 требуется не только срабатывание компаратора 16, но и срабатывание компаратора 14. В случае, если произойдет срабатывание компаратора 14 из-за неточного формирования номинального скольжения роторов, переключение переключателя 4 произойдет только если будет зафиксировано недопустимое рассогласование параметров πT первого и второго каналов. Настройка компаратора 16 выбирается в соответствии с величиной допустимого рассогласования πT при исправных датчиках давления и классом их точности датчиков давления.
Таким образом, настоящее изобретение позволяет обеспечить управление режимом работы компрессора низкого давления при параметрических отказах датчиков давления воздуха и газа, повысить надежность системы управления и надежность работы двигателя в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2555933C2 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2544636C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2627627C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2545111C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2545110C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2555939C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2544414C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623849C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555935C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2556090C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления многорежимными газотурбинными двухконтурными двигателями (ГТД) с регулируемым критическим сечением реактивного сопла. Предлагается способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя, согласно которому измеряют частоты вращения роторов двигателя и определяют их отношение (S), определяют отношение давления воздуха за компрессором высокого давления к давлению газа за турбиной низкого давления двумя каналами измерения (πT1 и πT2), определяют минимальное (πTmin) и максимальное (πTmax) значения из величин πT1 и πT2, формируют заданное отношение давлений (πТзад), расчетным путем формируют номинальное отношение частот вращения роторов двигателя (Sном) в зависимости от приведенной частоты вращения ротора компрессора высокого давления, формируют величину отклонения текущего отношения частот вращения роторов двигателя от номинального (ΔS=S-Sном), если величина ΔS меньше порога срабатывания компаратора, регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения πTmax от πТзад для парирования отклонения, при превышении величиной ΔS заранее выбранного порога регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения πTmax от πТзад. Техническим результатом настоящего изобретения является повышение надежности системы управления, обеспечение поддержания заданного режима работы компрессора низкого давления при параметрических отказах датчиков давления и исключение дополнительного снижения тяги по мере выработки ресурса. 5 з.п. ф-лы, 2 ил., 1 табл.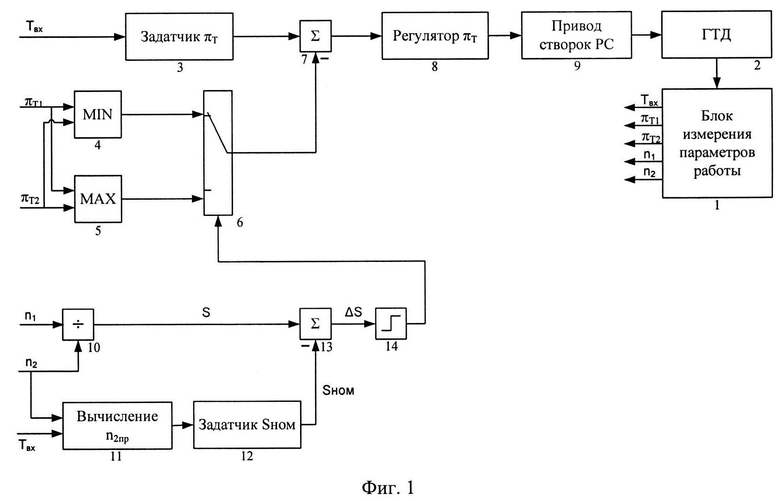
1. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя, согласно которому измеряют частоты вращения роторов двигателя и определяют их отношение (S), определяют отношение давления воздуха за компрессором высокого давления к давлению газа за турбиной низкого давления двумя каналами измерения (πT1 и πT2), определяют минимальное (πTmin) и максимальное (πTmax) значения из величин πT1 и πТ2, формируют заданное отношение давлений (πТзад), расчетным путем формируют номинальное отношение частот вращения роторов двигателя (Sном) в зависимости от приведенной частоты вращения ротора компрессора высокого давления, формируют величину отклонения текущего отношения частот вращения роторов двигателя от номинального (ΔS=S-Sном), если величина ΔS меньше порога срабатывания компаратора, регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения πTmax от πТзад для парирования отклонения, при превышении величиной ΔS заранее выбранного порога регулируют площадь критического сечения реактивного сопла двигателя в зависимости от отклонения πTmax от πТзад.
2. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя по п. 1, отличающийся тем, что используют двигатель, оснащенный регулируемыми направляющими аппаратами компрессора низкого давления, и номинальное отношение частот вращения роторов корректируют в зависимости от их положения.
3. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя по п. 1, отличающийся тем, что используют двигатель, оснащенный регулируемыми направляющими аппаратами компрессора высокого давления, и номинальное отношение частот вращения роторов корректируют в зависимости от их положения.
4. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя по п. 1, отличающийся тем, что используют двигатель, оснащенный противообледенительной системой с отбором воздуха из компрессора двигателя, и номинальное отношение частот вращения роторов корректируют в зависимости от состояния ее работы.
5. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя по п. 1, отличающийся тем, что используют двигатель, оснащенный системой охлаждения турбины с отбором охлаждающего воздуха из компрессора газотурбинного двигателя, и номинальное отношение частот вращения роторов корректируют в зависимости от состояния ее работы.
6. Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя по любому из пп. 1-5, отличающийся тем, что сформированное расчетным путем отношение частот вращения роторов двигателя уточняют при испытаниях двигателя.
| СПОСОБ УПРАВЛЕНИЯ ПЛОЩАДЬЮ КРИТИЧЕСКОГО СЕЧЕНИЯ РЕАКТИВНОГО СОПЛА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2443890C1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2627627C1 |
| RU 27481460 C1, 12.10.2022 | |||
| WO 03036063 A2, 01.05.2003 | |||
| US 4296601 A, 27.10.1981. | |||

