Изобретение относится к области измерений, а именно к способам исследования или анализа материалов с использованием электрических и магнитных средств [G01N27/00, G01N27/72, G01N27/82, G01R 29/08, G01R 31/00].
Электромагнитное излучение способно распространяться практически во всех средах. Электромагнитная волна представляет собой распространяющееся в пространстве электромагнитное поле, состоящее из двух компонент: электрического поля и магнитных полей. Электромагнитная помеха — нежелательное физическое явление или воздействие электрических, магнитных или электромагнитных полей, электрических токов или напряжений внешнего или внутреннего источника, которое нарушает нормальную работу технических средств, или вызывает ухудшение технических характеристик и параметров этих средств. Электромагнитные или радиочастотные помехи (наводки) в сети электропитания и в электронных цепях возникают от работы электрических машин и электронных устройств.
Из уровня техники известно УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ОБЪЕКТА ПО ИЗМЕНЕНИЮ ЭЛЕКТРОМАГНИТНОЙ ИНДУКЦИИ [US5432444A, опубликовано: 11.07.1995], содержащее блок единой катушки обнаружения, включающий проходящий через него путь контроля, через который проходит проверяемый объект, и состоящий по существу из катушки возбуждения, которая реагирует на приложенный к нему переменный ток для создания электромагнитного поля, которое меняется в зависимости от объекта, когда объект проходит через путь контроля, и индукционную катушку, которая непосредственно принимает электромагнитное поле, создаваемое катушкой возбуждения, и в котором электродвижущий ток индуцируется в ответ на электромагнитное поле, создаваемое катушкой возбуждения, причем электродвижущий ток обозначает электромагнитную индукцию блока единой катушки обнаружения, блок принятия решения, соединенный с индукционной катушкой, для приема электродвижущего тока, индуцированного в индукционной катушке, для сравнения электродвижущего тока с заранее определенным эталонным значением для получения результата сравнения и для обнаружения отклонения от нормы в объекте, подлежащем тестированию, в соответствии с результатом сравнения, в котором конструкция индукционной катушки непосредственно прикреплена к катушке возбуждения с образованием единого блока катушек обнаружения, индукционная катушка коаксиально навита вокруг катушки возбуждения, а катушки выполнены электрически изолированными.
Также известна СИСТЕМА РЕЗОНАНСНОГО СКАНИРОВАНИЯ И СПОСОБ ИСПЫТАНИЯ ОБОРУДОВАНИЯ НА ЭЛЕКТРОМАГНИТНЫЕ РЕЗОНАНСЫ [US8143903B2, опубликовано:·27.03.2012], содержащая подсистему обнаружения резонанса, выполненную с возможностью передачи входных сигналов в оборудование и приема выходных сигналов вследствие резонансов в ответ на входные сигналы для идентификации по меньшей мере одного из резонирующего местоположения, резонансной частоты и добротности резонанса оборудования, подсистема обнаружения резонанса, включающая в себя зонд, по меньшей мере, для приема выходных сигналов и подсистему автоматического сканирования, выполненную с возможностью перемещения зонда подсистемы обнаружения резонанса в разные места тестирования оборудования для сканирования оборудования с помощью зонда, так что подсистема обнаружения резонанса определяет, обнаруживает ли какое-либо из различных мест тестирования оборудования электромагнитный резонанс.
Способ испытания оборудования на электромагнитные резонансы с использованием системы резонансного сканирования в указанном аналоге US8143903B2 характеризуется тем, что система резонансного сканирования содержит подсистему обнаружения резонанса, включающую зонд, и подсистему автоматического сканирования, выполненную с возможностью перемещения зонда подсистемы обнаружения резонанса в различные места тестирования оборудования, сканирование оборудование с помощью зонда, чтобы подсистема обнаружения резонанса определяла, обнаруживает ли какое-либо из различных мест тестирования оборудования электромагнитные резонансы, причем способ включает автоматическое позиционирование зонда в различных местах оборудования с помощью подсистемы автоматического сканирования, передачу входных сигналов от системы обнаружения резонанса в оборудование в различных местах расположения оборудования, прием в системе обнаружения резонанса выходных сигналов от оборудования вследствие резонансов в ответ на входные сигналы, передаваемые в оборудование с помощью зонда и обработку в системе обнаружения резонанса выходных сигналов для идентификации по меньшей мере одного из местоположения резонанса, резонансной частоты и добротности резонанса оборудования.
Недостатками аналогов является то, что они не обеспечивают подавление электромагнитных помех при измерении слабых сигналов, возникающих при эффекте Нернста из-за фиксированного размещения источника магнитных помех, связь которого и измерительной цепи тесно связаны с расположением и ориентацией образца, сигнал которого измеряют в магните и который будет отличаться при смещении образца, что является существенным, так как после выявления магнитных помех следует выполнить операции по их ограничению.
Задача изобретения заключается в устранении недостатков аналогов.
Техническим результатом изобретения является обеспечение возможности компенсации электромагнитных помех в измерительной системе сигнала, возникающего в сверхпроводнике при эффекте Нернста и повышение точности измерения сигнала Нернста.
Указанный технический результат достигается за счет того, что способ компенсации электромагнитных помех при измерениях сигнала Нернста, характеризующийся тем, что проводится с помощью устройства компенсации электромагнитных помех путем создания пульсирующего магнитного поля и индуцирования противоположных по направлению токов в петлях компенсатора, подключенного к сверхпроводнику, сигнал Нернста которого измеряется при градиенте температур между его торцами и взаимного изменения площадей петель упомянутого компенсатора, расположенных вдоль сверхпроводника.
Устройство компенсации электромагнитных помех при измерениях сигнала Нернста, содержащее смонтированные в рамке нагревательные элементы, выполненные с возможностью размещения между ними сверхпроводника, сигнал Нернста которого измеряется и создания между торцами упомянутого сверхпроводника градиента температур, вдоль сверхпроводника смонтирован компенсатор магнитного поля, содержащий пару петель, выполненных с возможностью увеличения площади одной петли за счет уменьшения площади второй петли путем возвратно-поступательного перемещения участка одной из петель вдоль сверхпроводника вместе с тросом, один конец которого соединен винтовой передачей с управляемым с помощью контроллера двигателем, а второй конец троса соединен с пружиной постоянного усилия, выполненной с возможностью постоянного натяжения троса, компенсатор выполнен из провода, концы которого подключены к сверхпроводнику, сигнал Нернста которого измеряется, к одному из проводов компенсатора последовательно подключен измеритель сигнала.
В частности, двигатель выполнен шаговым.
В частности, пружина постоянного усилия выполнена спиральной.
В частности, концы провода компенсатора выполнены скрученными между собой с возможностью компенсации магнитных помех на этом участке провода за счет симметрирования.
В частности, рамка снабжена винтовым регулятором, выполненным с возможностью регулирования усилия, по крайней мере, на один из нагревательных элементов для надежного размещения сверхпроводника между нагревательными элементами.
В частности, измеритель сигнала выполнен в виде нановольтметра или нановольтметра-микроомметра.
Краткое описание чертежей.
На фиг.1 показан график зависимости изменения сигнала Нернста от времени в условиях электромагнитных помех.
На фиг.2 схематично показано устройство для подавления электромагнитных помех для измерения сигнала Нернста.
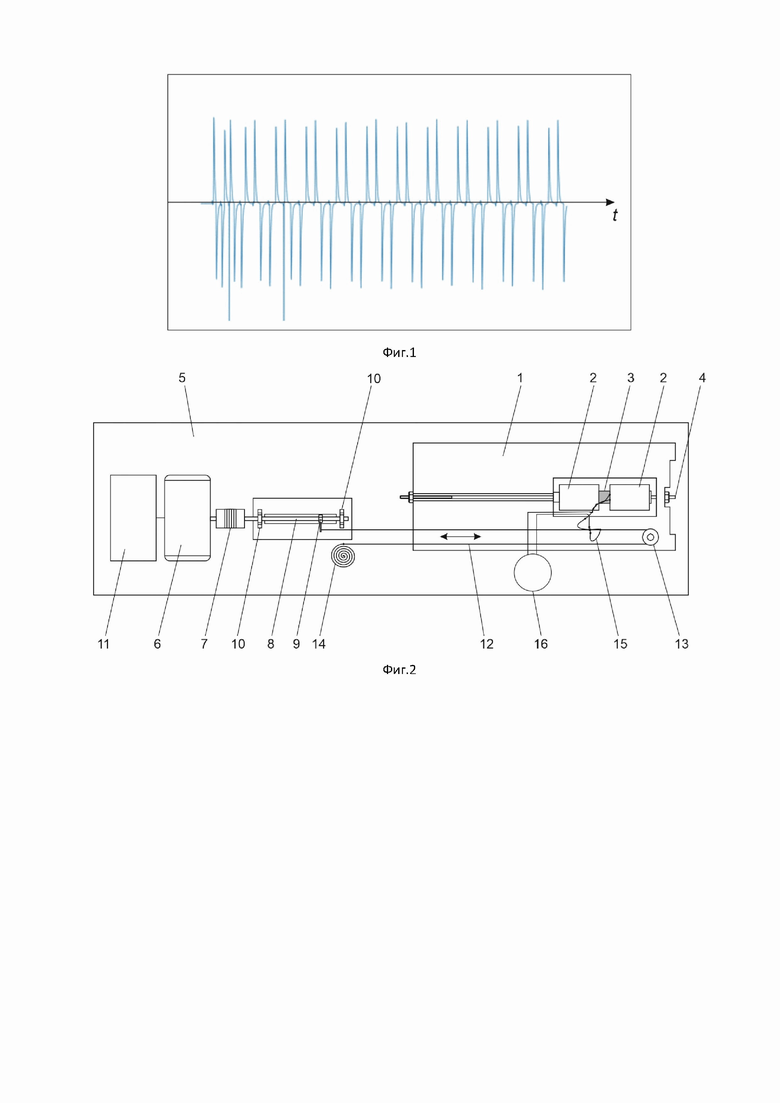
На фиг.3 показано взаимное изменение размеров петель компенсатора устройства для подавления электромагнитных помех (а – в исходном состоянии, б – при перемещении троса вправо, в – при перемещении троса влево).
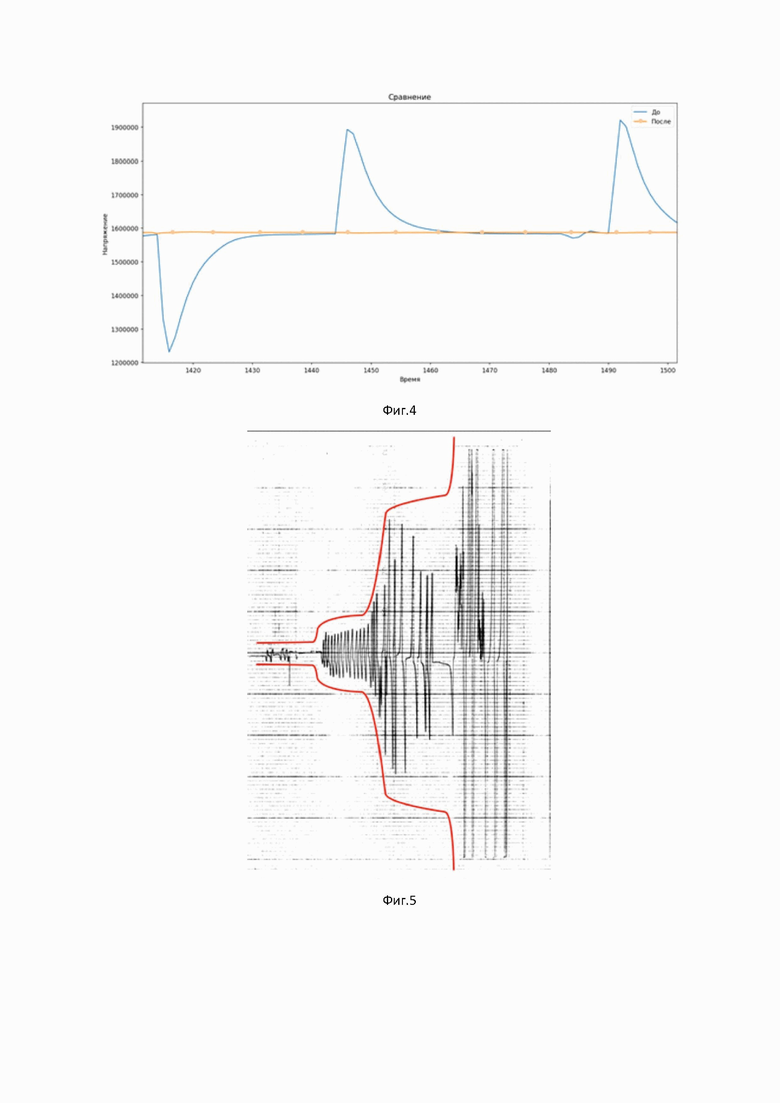
На фиг.4 показаны графики изменения сигнала Нернста без компенсации и с компенсацией электромагнитных помех.
На фиг.5 показан процесс компенсации (справа-налево) электромагнитных помех при измерении сигнала Нернста.
На фигурах обозначено: 1 – рамка, 2 – нагревательные элементы, 3 – сверхпроводник, 4 – винтовой регулятор, 5 – опорная поверхность, 6 – двигатель, 7 – муфта, 8 – винтовой стержень, 9 – винтовая гайка, 10 – опорные подшипники, 11 – контроллер, 12 – трос, 13 – опорный ролик, 14 – пружина постоянного усилия, 15 – компенсатор, 16 – измеритель сигнала.
Осуществление изобретения.
Сущность настоящего изобретения состоит в обеспечении возможности регистрации в условиях электромагнитных помех сигнала, возникающего в сверхпроводнике в результате эффекта Нернста, путем его быстрой стабилизации после изменения магнитного поля, регистрация которого усложняется необходимостью компенсации электромагнитных помех, возникающих в результате интерференции токов в момент переключения магнитного поля. На фиг.1 показан график зависимости изменения сигнала Нернста от времени без компенсации.
Подавление интерференции токов, возникающей в момент переключения магнитного поля и компенсацию электромагнитных помех осуществляют путем возвратно-поступательного перемещения с помощью линейного двигателя источника пульсирующего магнитного поля и переключением магнитного поля для компенсации электромагнитных помех, повторяя этот процесс до достижения заданной степени подавления магнитных помех.
Эффект Нернста - это кинетический эффект носителей заряда в твердотельных проводниках, индуцируемый сочетанием градиента температуры и магнитного поля. Заявленное изобретение касается только магнитной индукции, которая индуцируется изменением магнитного поля от нуля до максимального значения за очень короткий промежуток времени. Абсолютное значение сигнала Нернста очень мало по сравнению с индукционным импульсом  , вызванным быстрыми изменениями магнитного поля, а также из-за того, что в этот период обычно отсутствует температурный градиент.
, вызванным быстрыми изменениями магнитного поля, а также из-за того, что в этот период обычно отсутствует температурный градиент.
Принцип изобретения заключается в компенсации электромагнитных помех катушкой с изменяемой площадью, которая могла бы выдавать различное значение индукционного напряжения  , для обеспечения достижения минимального значения
, для обеспечения достижения минимального значения  . Здесь значение равно S,
. Здесь значение равно S, 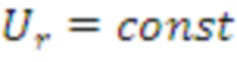 .
.
Устройство для захвата сигнала Нернста, содержит рамку 1 (см.Фиг.2), выполненную с возможностью монтажа в ней двух нагревательных элементов 2 для размещения между упомянутыми нагревательными элементами 2 сверхпроводника 3, сигнал Нернста которого захватывается.
Для надежного размещения сверхпроводника 3 между нагревательными элементами 2 рамка 1 снабжена винтовым регулятором 4, выполненным с возможностью регулирования усилия, по крайней мере, на один из нагревательных элементов 2.
Винтовой регулятор 4 смонтирован коаксиально линии симметрии нагревательных элементов 2 и размещенного между ними сверхпроводника 3.
Рамка 1 смонтирована на опорной поверхности 5.
На опорной поверхности 5 смонтирован двигатель 6, выполненный шаговым, вал которого с помощью муфты 7 соединен коаксиально с винтовой передачей, выполненной в виде винтового стержня 8 и опорной винтовой гайки 9, перемещающейся по резьбе винтового стержня 8 при его вращении. Винтовой стержень 8 опирается на опорные подшипники 10.
Двигатель 6 подключен к контроллеру 11, выполненному с возможностью управления упомянутым двигателем 6. В одном из вариантов реализации контроллер 11 может быть смонтирован на опорной поверхности 5.
К винтовой гайке 9 смонтирован одним своим концом трос 12, который протянут вдоль сверхпроводника 3 через опорный ролик 13, смонтированный на рамке 1 и соединенный своим вторым концом к пружине постоянного усилия 14, смонтированной на опорной поверхности 1.
Пружина постоянного усилия 14 выполнена спиральной.
На тросе 12 и на рамке 1 смонтирован компенсатор 15, выполненный в виде «скользящей» восьмерки с возможностью изменения размеров образующих восьмерку верхней и нижней петель при перемещении троса. Компенсатор 15 выполнен из провода, концы которого подключены к одному торцу сверхпроводника 3. Для того, чтобы обеспечить изменение размеров петель компенсатора 15, первый конец провода из которого выполнен компенсатор 15 от точки подключения на торце сверхпроводника 3 зафиксирован на рамке 1 вблизи сверхпроводника 3 и проходя без натяжения вдоль троса 12 к опорному ролику 13, образуя первую, нижнюю петлю и зафиксирован на тросе 12. Далее провод компенсатора 15 образуя вторую петлю проходя назад с противоположной относительно троса 12 стороны от первой петли, зафиксирован на рамке 1. После этого провод свободно окольцовывает трос 12 вместе с участком провода, проходящим от первой петли вдоль троса 12 одним оборотом и зафиксирован на рамке 1, но уже с противоположной стороны и подключен к торцу сверхпроводника 3.
Опорный ролик 13 и пружина постоянного усилия 14 смонтированы таким образом, что трос 12 между винтовой гайкой 9 и опорным роликом 13 ориентирован параллельно нагревательным элементам 2, сверхпроводнику 3 и винтовому регулятору 4 с возможностью изменения размеров петель компенсатора 15 при перемещении троса 12 строго вдоль сверхпроводника 3 в его непосредственной близости с возможностью воздействия противоположным изменяющемуся магнитному полю сверхпроводника 3 индукционным сигналом.
Концы провода компенсатора 15 на участке от сверхпроводника 3 до первой нижней петли компенсатора 15 выполнены скрученными по длине между собой с возможностью компенсации магнитных помех на этом участке провода за счет симметрирования.
К компенсатору 15 к одному из проводу на скрученном участке последовательно подключен измеритель сигнала 16, выполненный в виде нановольтметра или нановольтметра-микроомметра.
Устройство используют следующим образом.
Устанавливают сверхпроводник 3 в рамке 1 и фиксируют с помощью винтового регулятора 4, обеспечивая тем самым надежный тепловой контакт между нагревателями 2 и сверхпроводником 3.
Подключают к сверхпроводнику 3 концы провода компенсатора 15.
Включают контроллер 11 двигателя 6 и приводят во вращение двигатель 6. С вала двигателя 6 вращение через муфту 7 передают на винтовой стержень 8 винтовой передачи, вращение которого приводит в перемещению по его резьбе опорной винтовой гайки 9. За счет вращения вала двигателя 6 в противоположные стороны обеспечивают возвратно-поступательное перемещение опорной винтовой гайки 9 по винтовому стержню 8. Возвратно-поступательное перемещение опорной винтовой гайки 9 передают на трос 12, который, как уже указано было выше, через опорный ролик 13 соединен с пружиной постоянного усилия 14, обеспечивающей постоянное натяжение троса 12. При перемещении участка троса 12 между опорной винтовой гайкой 9 и опорным роликом 13 вдоль сверхпроводника 3 изменяют свои взаимные размеры петли компенсатора 15 (см.Фиг.3). Электродвижущая сила в скрученном участке провода компенсатора 15 и в петлях компенсатора 15 противоположны друг другу и компенсируются, обеспечивая тем самым подавление интерференции токов, возникающей в момент переключения магнитного поля и позволяя компенсировать электромагнитные помехи. Процесс изменения взаимных площадей петель компенсатора 15 повторяют до тех пор, пока электромагнитные помехи не окажутся минимальными на уровне регистрируемого с помощью измерителя сигнала 16 сигнала Нернста, что позволит его уверенно захватить (зарегистрировать).
Заявленное изобретение позволяет скомпенсировать электромагнитные помехи, возникающие при переключении магнитного поля при измерении сигнала Нернста, возникающего в сверхпроводнике и возникновения явления интерференции токов путем регулируемого изменения индукции в петлях компенсатора 15 за счет изменения их взаимных размеров (площадей), где при увеличении площади одной петли уменьшается площадь второй петли и в результате компенсатор 15 позволяет генерировать два вида индукционных сигналов, противоположных друг другу, суммируя которые обеспечивается компенсация электромагнитных помех. Из-за слабого сигнала Нернста, требуется реализация точной регулировки компенсатора 15, которая обеспечивается заявленным устройством. Точность заявленного устройства определяется главным образом двигателем 6 и винтовой передачей. В 2023 году автором изобретения был изготовлен макет заявленного устройства с шаговым двигателем 6 с шагом 1,8°, который под управлением контроллера 11 обеспечивал вращение винтового стержня М3 8 с шагом 1/32. Точность поворота вала двигателя 6 составляла 0,05625°. Точность перемещения линейной системы троса 12 составляла 7,8125*10-5 мм [(0,5 мм * 0,05625)/360]. Пружина постоянного усилия 14 обеспечивала постоянное натяжение троса, что очень важно для свободного изменения площадей петель компенсатора 15 в двух направлениях. Результаты компенсации показаны на фиг.4, 5.
Регулируемый компенсатор для подавления импульса в процессе захвата сигнала Нернста был изготовлен и использован в экспериментальном оборудовании для измерения сигналов Нернста, показан на Фиг. 5.
Заявленные способ и устройство для его реализации позволяют уменьшить интерференцию токов, возникающую при переключениях магнитного поля и оказывающие влияние на сигнал Нернста.
Изобретение имеет следующие преимущества и эффекты:
- компенсатор 15 выполнен в виде участка провода и практически не заглушает сигнал Нернста от сверхпроводника 3;
- для регулирования площадей петель компенсатора 15 предусмотрена точная система привода троса 12, приводимая в движение системой линейного перемещения, управляемой микроконтроллером 11, состоящая из винтовой передачи, смонтированной на опорной раме и шагового двигателя 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ЗАХВАТА СИГНАЛА, ВОЗНИКАЮЩЕГО ПРИ ЭФФЕКТЕ НЕРНСТА-ЭТТИНГСГАУЗЕНА В СВЕРХПРОВОДНИКЕ | 2023 |
|
RU2806889C1 |
| Устройство и способ индуктивного считывания для неинвазивного измерения механической активности сердца и легких пациента | 2019 |
|
RU2787461C2 |
| СХЕМА МАГНИТНОЙ КОМПЕНСАЦИИ И СПОСОБ КОМПЕНСАЦИИ ВЫХОДНОГО СИГНАЛА МАГНИТНОГО ДАТЧИКА, РЕАГИРУЮЩЕГО НА ИЗМЕНЕНИЯ ПЕРВОГО МАГНИТНОГО ПОЛЯ | 2014 |
|
RU2663682C2 |
| УСТРОЙСТВО ПРОГРЕВАНИЯ МАГНИТНЫХ ЧАСТИЦ НА ОСНОВЕ МИКРОСХЕМЫ С ИНТЕГРИРОВАННЫМ МИКРОКОНТРОЛЛЕРОМ И С ЭЛЕКТРОМАГНИТНЫМ УПРАВЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ГЕНЕРАЦИЕЙ АЭРОЗОЛЯ | 2022 |
|
RU2830594C2 |
| ПРЕОБРАЗОВАТЕЛЬ (ВАРИАНТЫ) | 2005 |
|
RU2298802C2 |
| СПОСОБ ИМПУЛЬСНОЙ АЭРОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2251718C1 |
| СПОСОБ И СИСТЕМА АЭРОЭЛЕКТРОРАЗВЕДКИ | 2016 |
|
RU2649658C2 |
| БОРТОВАЯ ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПЕТЛИ ПЕРЕДАТЧИКА | 2009 |
|
RU2494420C2 |
| Способ увеличения однородности радиочастотного поля датчика среднеполевого магнитно-резонансного томографа и катушка для его осуществления | 2022 |
|
RU2795364C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 2011 |
|
RU2502092C2 |
Использование: для компенсации электромагнитных помех при измерениях сигнала Нернста. Сущность изобретения заключается в том, что создают пульсирующее магнитное поле и выполняют индуцирование противоположных по направлению токов в петлях компенсатора, подключенного к сверхпроводнику, сигнал Нернста которого измеряется при градиенте температур между его торцами, а также выполняют взаимное изменение площадей петель упомянутого компенсатора, расположенных вдоль сверхпроводника. Технический результат: обеспечение возможности компенсации электромагнитных помех в измерительной системе сигнала, возникающего в сверхпроводнике при эффекте Нернста. 2 н. и 5 з.п. ф-лы, 5 ил.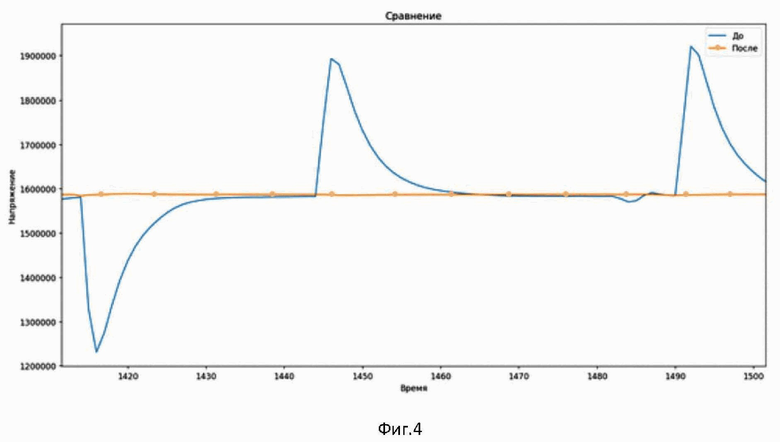
1. Способ компенсации электромагнитных помех при измерениях сигнала Нернста, характеризующийся тем, что проводится с помощью устройства компенсации электромагнитных помех путем создания пульсирующего магнитного поля и индуцирования противоположных по направлению токов в петлях компенсатора, подключенного к сверхпроводнику, сигнал Нернста которого измеряется при градиенте температур между его торцами, и взаимного изменения площадей петель упомянутого компенсатора, расположенных вдоль сверхпроводника.
2. Устройство компенсации электромагнитных помех при измерениях сигнала Нернста, содержащее смонтированные в рамке нагревательные элементы, выполненные с возможностью размещения между ними сверхпроводника, сигнал Нернста которого измеряется, и создания между торцами упомянутого сверхпроводника градиента температур, вдоль сверхпроводника смонтирован компенсатор магнитного поля, содержащий пару петель, выполненных с возможностью увеличения площади одной петли за счет уменьшения площади второй петли путем возвратно-поступательного перемещения участка одной из петель вдоль полупроводникового образца вместе с тросом, один конец которого соединен винтовой передачей с управляемым с помощью контроллера двигателем, а второй конец троса соединен с пружиной постоянного усилия, выполненной с возможностью постоянного натяжения троса, компенсатор выполнен из провода, подключенного к сверхпроводнику, сигнал Нернста которого измеряется, к одному из проводов компенсатора последовательно подключен измеритель сигнала.
3. Устройство по п.2, отличающееся тем, что двигатель выполнен шаговым.
4. Устройство по п.2, отличающееся тем, что пружина постоянного усилия выполнена спиральной.
5. Устройство по п.2, отличающееся тем, что концы провода компенсатора выполнены скрученными между собой с возможностью компенсации магнитных помех на этом участке провода за счет симметрирования.
6. Устройство по п.2, отличающееся тем, что рамка снабжена винтовым регулятором, выполненным с возможностью регулирования усилия по крайней мере на один из нагревательных элементов для надежного размещения сверхпроводника между нагревательными элементами.
7. Устройство по п.2, отличающееся тем, что измеритель сигнала выполнен в виде нановольтметра или нановольтметра-микроомметра.
| В.Э.Гасумянц, Н.В.Агеев, М.В.Елизарова, Коэффициент Нернста-Эттингсгаузена в легированных ВТСП системах YBa2Cu3Oy в нормальной фазе, Физика твердого тела, 2005, том 47, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пылеочистительное устройство к трепальным машинам | 1923 |
|
SU196A1 |
| В.Э.Гасумянц, О.А.Мартынова, Сравнительное исследование коэффициента Нернста-Эттингсгаузена в нормальной фазе в системах Y1−xPrxBa2Cu3Oy и | |||

