ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к геодезическим приборам и может быть использовано при выполнении работ по геодезическому и геотехническому мониторингу в автоматическом и ручном режимах, по геометрическому нивелированию, при измерениях уклонов, горизонтов, расстояний в топографии и геодезии.
УРОВЕНЬ ТЕХНИКИ
Известен механизм коррекции ошибок горизонтального положения для электронного нивелира, содержащий оптическую систему телескопа, включающую в себя оптическую систему объектива, компенсаторное устройство, светоделитель, разделяющий световые потоки на линейный фотоэлектрический датчик для формирования сигнала структуры нивелирной рейки, и на визуальную оптическую систему для наведения на нивелирную рейку, и вычислительное устройство для обработки выходного сигнала от фотоэлектрического преобразователя (патент США №5777899). Компенсаторное устройство для коррекции наклона электронного нивелира включает в себя подвешенный оптический элемент с возможностью качательного движения в прямом и обратном направлениях, и влево и вправо направлениях в ответ на наклон компенсаторного средства, и устройство определения угла наклона подвешенного оптического элемента.
В таком варианте электронного нивелира линейный фотоэлектрический датчик преобразует шаблонное изображение нивелирной рейки, сформированное объективом, в электрический сигнал, что позволяет считывать градуировку нивелирной рейки электронным способом и устранить ошибку измерения измерителем, используя преобразования Фурье и дифференцирование выходного сигнала от линейного датчика.
Недостатками этого устройства являются наличие визуального канала, предусматривающее применение компенсаторного устройства, содержащего три отражающие поверхности, снижающего общее светопропускание, а также наличие светоделителя, снижающего светопропускание в направлении как для фотоэлектрического датчика, так и для визуальной оптической системы. Наличие визуальной оптической системы и линейного фотоэлектрического датчика не позволяет осуществлять производство нивелирования и производить визирование и наблюдение на удалении от нивелира на удобном для наблюдателя расстоянии, а также выполнять работы по геодезическому и геотехническому мониторингу в автоматическом режиме.
Известен самоустанавливающийся нивелир, содержащий объектив, плоское зеркало-компенсатор наклона, визирную сетку, неподвижное зеркало, расположенное перед объективом под углом 45° к визирной оси и соосно с объективом, подвижное зеркало с двухсторонним покрытием с осью поворота, перпендикулярной визирной оси, расположенное перед объективом, линейку ПЗС, оптически сопряженную с подвижным зеркалом и кинематически связанную с объективом, ПЗС матрицу с визирной сеткой, расположенной в задней фокальной плоскости объектива и жестко связанной с ним, усилитель видеосигнала, микропроцессор, развертывающее устройство, аналого-цифровой преобразователь, смеситель, знакогенератор и видеоконтрольное устройство. Плоское зеркало расположено на половине фокусного расстояния от главной плоскости объектива и является компенсатором наклона в вертикальной плоскости, силовой и коррекционный компоненты объектива установлены с возможностью продольного перемещения (патент РФ на изобретение №2154809).
Такой вариант самоустанавливающегося нивелира позволяет автоматизировать работы, осуществить производство нивелирования без геодезической рейки, а визирование и ведение наблюдений вести на телевизионном экране видеоконтрольного устройства, которое может быть удалено от нивелира на любое, удобное для наблюдателя, расстояние.
Недостатками этого самоустанавливающегося нивелира являются наличие двух фотоэлектрических датчиков - линейного и матричного фотоприемников, применение трех отражающих поверхностей, снижающих общее светопропускание, сложность конструктивного и технологического исполнения механической части нивелира, а также значительные габаритные размеры, обусловленные установкой неподвижного и подвижного зеркал перед входным зрачком объектива, что в варианте выполнения нивелира как высокоточного устройства (с ошибкой измерения менее 1ʺ), требующего увеличенного значения фокусного расстояния объектива (до ~500 мм) и соответственно увеличенного значения входного зрачка объектива (более 90 мм), ведет к еще большему увеличению размеров подвижного и неподвижного зеркал и нивелира в целом.
Наиболее близким по технической сущности является электронный нивелир и способ видеовизирования, содержащий объектив, матрицу приемника ПЗС, вертикальную ось, вокруг которой может поворачиваться нивелир, выравнивающее устройство для приблизительного выравнивания нивелира относительно градуированной марки, инклинометр, блок ввода данных измерений, блок питания, привод фокусировки, компьютер для обработки данных измерений, вычислений значений измерений и для оценки изображения, экран со светозащитным козырьком для отображения изображения градуированной марки, снабженной кодированной градуировкой и установленной на мишени (патент США №6237235). Инклинометр устанавливается фиксированным образом для измерения отклонения положения оси визирования относительно горизонта, ось визирования образована центральным пикселем матрицы ПЗС приемника.
Матрица приемника работает в режиме видеосигнала, объектив или матрица приемника расположены в фиксированном положении относительно вертикальной оси, а фокусировка может осуществляться автоматически с помощью встроенной системы оценки изображения, которая анализирует изображение градуированной марки и вызывает выполнение фокусировки посредством известных программ оценки изображений, вырабатывающих сигнал для привода, регулирующего расстояние между объективом и матрицей приемника. Когда программа оценки изображения обнаруживает четкое изображение, процесс фокусировки прекращается и становится возможным прочтение градаций градуированной марки, установленной на мишени. Выравнивающее устройство - трегер осуществляет предварительное горизонтирование нивелира, наиболее точная коррекция малых наклонов нивелира осуществляется компьютером по программе за счет смещения от центрального пикселя - выбором другого пикселя в качестве центрального, в зависимости от показаний инклинометра, измеряющего малые наклоны нивелира. Если нивелир наклонен, то соответствующие сигналы от инклинометра преобразуются компьютером, вычисляющим соответствующие поправки для выбора другого пикселя в качестве центрального, чем обеспечивается сохранение горизонтальности оси визирования.
Обеспечивается точное горизонтирование нивелира за счет предварительного горизонтирования трегером и за счет точного сохранения горизонтального положения линии визирования нивелира выбором соответствующего пикселя в качестве центрального по сигналам инклинометра, измеряющим наклоны нивелира.
Недостатками этого электронного нивелира и способа видеовизирования являются относительно невысокая точность горизонтирования визирной оси электронного нивелира, недостаточная для высокоточных измерений (с ошибкой ≤1ʺ), которая в данном устройстве определяется двумя составляющими - физическими размерами пикселя матрицы приемника при фиксированном значении фокусного расстояния объектива электронного нивелира и значениями точности измерения углов для существующих инклинометров. Например, при применении матрицы приемника с размером пикселя 1,55 мкм и при фокусном расстоянии объектива ~250 мм, точность горизонтирования визирной оси будет ограничена теоретическим значением, равным ~1,3ʺ. Вторая составляющая обусловлена инструментальной ошибкой измерения угла наклона инклинометром. Лучшие образцы инклинометров достигают точности измерения 0,001°, например, инклинометр «ЛК-ИНК-БС5000», поставляемый предприятием «Лазерные компоненты (www.lasercomponents.ru), что составляет 3,6ʺ. Суммарная ошибка горизонтирования визирной оси электронного нивелира составит ~4,9ʺ (1,3ʺ+3,6ʺ). Аналогичные значения обеспечивают образцы других изготовителей на рынке инклинометров, например инклинометры марки HCR716S/HCR726S, поставляемые предприятием АО «Сенсор Системе»(www.sensor-systems.ru). Использование метода прочтения градаций стандартной градуированной марки, установленной на мишени, не позволяет полностью автоматизировать выполнение работ по геодезическому и геотехническому мониторингу.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является:
- повышение точности измерений электронным нивелиром,
- повышение точности компенсации наклона линии визирования в вертикальной плоскости,
- обеспечение малогабаритности конструкции электронного нивелира и
- обеспечение автоматизации выполнения работ по геодезическому и геотехническому мониторингу.
Технический результат, обусловленный поставленной задачей, достигается тем, что электронный нивелир, содержащий объектив и матричный фотоприемник, вертикальную ось, вокруг которой может поворачиваться электронный нивелир, выравнивающее устройство для предварительного горизонтирования электронного нивелира, привод фокусировки, компьютер обработки данных и экран со светозащитным козырьком для отображения изображения градуированной марки, установленной на мишени, в отличие от известного, содержит плоское зеркало - компенсатор наклона визирной оси в вертикальной плоскости, ось вращения которого перпендикулярна оптической оси объектива и пересекает ее, маятник, ось вращения которого параллельна оси вращения плоского зеркала, диск маятника, жестко установленный на оси вращения маятника соосно с ней и соединенный нитью с диском плоского зеркала, жестко установленным на оси вращения плоского зеркала соосно с ней, демпфер маятника, датчик внешней освещенности, причем плоское зеркало установлено в среднем положении под углом 45° к оптической оси объектива, а объектив выполнен зеркально-линзовым и содержит отрицательный мениск, кольцевая центральная зона на второй поверхности которого выполнена с зеркальным покрытием, главное зеркало, выполненное в виде зеркала Манжена, коррекционный компонент, выполненный либо в виде отрицательной выпукловогнутой линзы, обращенной выпуклостью к предмету, либо в виде двух линз, первая из которых представляет собой двояковогнутую отрицательную линзу, а вторая - двояковыпуклую положительную линзу, при этом отрицательный мениск установлен с возможностью подвижки вдоль оптической оси объектива и выполняется следующее соотношение:

где:
DОБ - диаметр входного зрачка объектива электронного нивелира;
S'ПЗ - расстояние по оптической оси между коррекционным компонентом объектива и осью вращения плоского зеркала;
S'ФП - расстояние между осью вращения плоского зеркала и чувствительной плоскостью матричного фотоприемника по отраженной от плоского зеркала оптической оси;
FОБ - фокусное расстояние объектива электронного нивелира.
Такой электронный нивелир позволяет:
- повысить точность измерений электронным нивелиром,
- повысить точность компенсации наклона линии визирования в вертикальной плоскости и
- обеспечить малогабаритность конструкции электронного нивелира.
Такой электронный нивелир обеспечивает дополнительное уменьшение дисторсии в ~1,7 раза при сохранении качества оптического изображения и габаритных размеров электронного нивелира.
В третьем варианте выполнения электронного нивелира градуированная марка представляет собой двухкоординатный штрих-код, содержащий вертикальные контрольные метки и угловые контрольные точки, а компьютер обработки данных выполнен с возможностью контроля диагоналей изображения двухкоординатного штрих кода.
Такой электронный нивелир обеспечивает повышение точности измерений и позволяет осуществить автоматизацию выполнения работ по геодезическому и геотехническому мониторингу.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
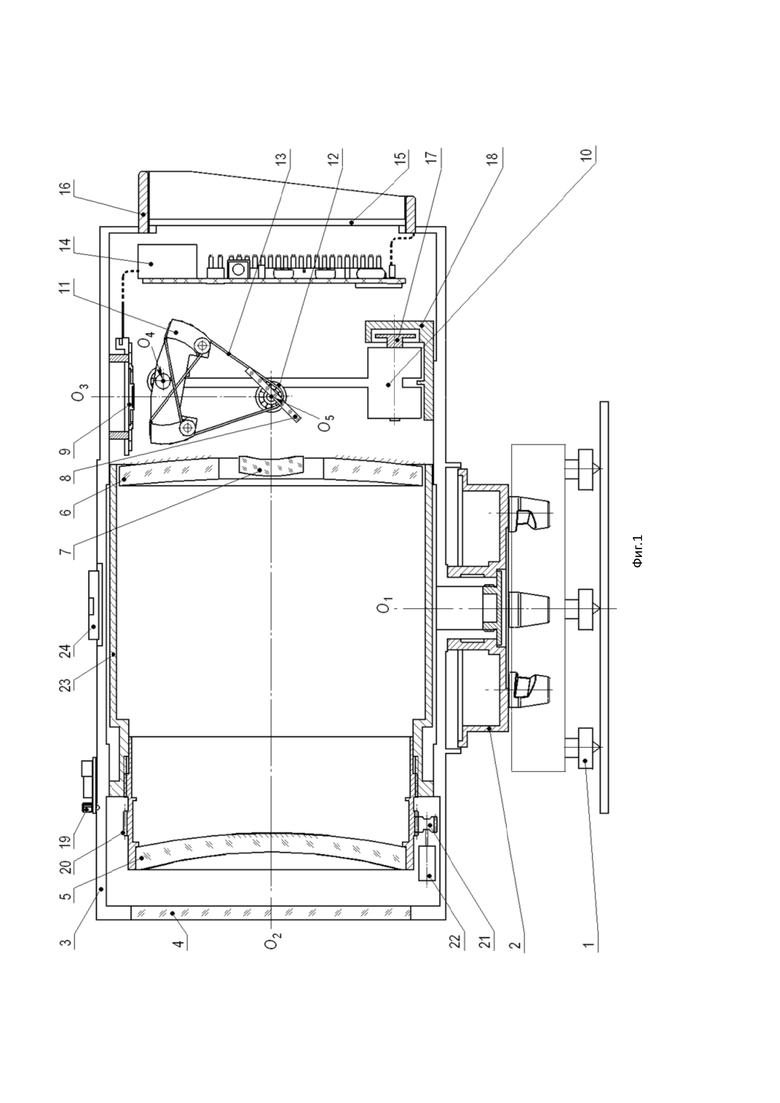
На фиг. 1 изображен разрез электронного нивелира в соответствии с первым вариантом выполнения.
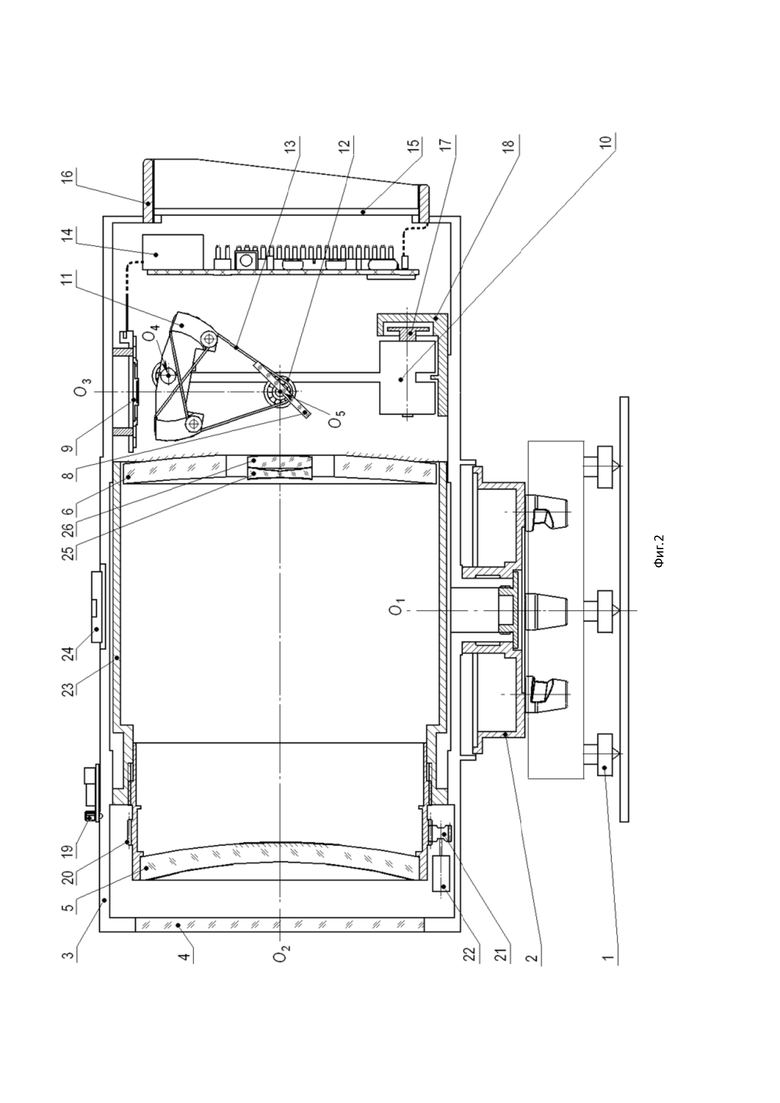
На фиг. 2 изображен разрез электронного нивелира в соответствии со вторым вариантом выполнения.
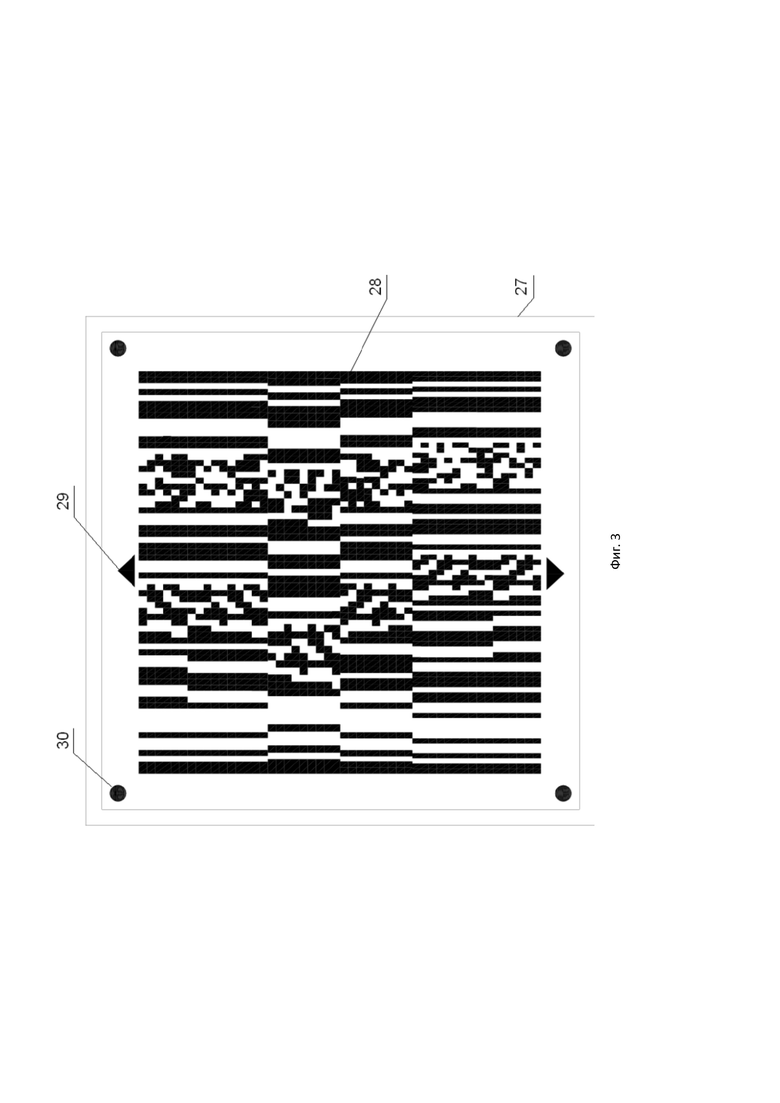
На фиг. 3 изображен пример штрих-кода.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на фиг. 1, электронный нивелир содержит:
стационарный трегер 1 с верхней частью 2,
корпус электронного нивелира 3,
защитное стекло 4,
отрицательный мениск 5 объектива,
главное зеркало Манжена 6 объектива,
коррекционный компонент 7 объектива,
плоское зеркало 8,
матричный фотоприемник 9,
рычаг 10 маятника,
диск 11 рычага 10 маятника,
диск 12 плоского зеркала 8,
нить 13,
средства обработки данных 14,
экран 15,
защитный козырек 16,
поршень 17 демпфера,
кронштейн с цилиндром 18 демпфера,
датчик внешней освещенности 19,
оправа с зубчатой передачей 20 и 21,
фокусировочный привод 22,
внутренний корпус 23,
уровень 24.
Обозначены: вертикальная ось «O1» трегера 1 и 2, оптическая ось «О2» от объектива 5, 6 и 7 до плоского зеркала 8, оптическая ось «О3» от плоского зеркала 8 до матричного фотоприемника 9, ось вращения «О4» рычага 10 маятника, ось вращения «О5» плоского зеркала 8.
Конструктивные параметры варианта исполнения оптической схемы электронного нивелира приведены в таблице 1.
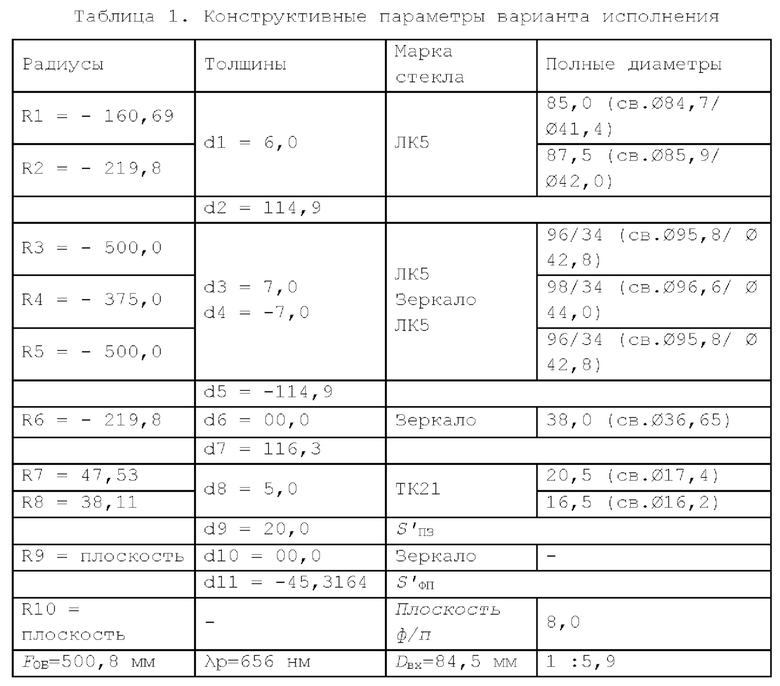
Рабочий спектральный интервал ахроматизации от 400 до 1000 нм.
Корректная работа оптического компенсатора линии визирования в пределах углов наклонов корпуса нивелира на ±7,5' для дистанций фокусировки от «∞» до 10 м обеспечивается поворотным зеркалом 8, при этом фокусировка на объект наблюдения осуществляется подвижкой отрицательного мениска 5 объектива. В процессе фокусировки на дистанцию до объекта изменяются воздушные промежутки d2, d5 и d7, величины которых 114,9 мм, -114,9 мм и 116,3 мм соответствуют фокусировке на объект, находящийся на 100 м.В процессе фокусировки фокусное расстояние объектива (FОБ.) изменяется от 506, 933 мм для дистанции «∞» и до 451, 645 мм для дистанции 10 м. Величина максимальной подвижки отрицательного мениска 5 при фокусировке от «∞» до 10 м, равна ~2,45 мм.
Показатели качества изображения для дистанции 100 м выполнены на дифракционном уровне, диаметры геометрических кружков рассеяния меньше, чем диаметр дифракционного диска Эйри.
Схема электронного нивелира по варианту 2 показана на фигуре 2.
Здесь в объективе содержится коррекционный компонент, состоящий из двояковогнутой отрицательной линзы 25 и двояковыпуклой положительной линзы 26.
Конструктивные параметры второго варианта исполнения электронного нивелира приведены в таблице2.
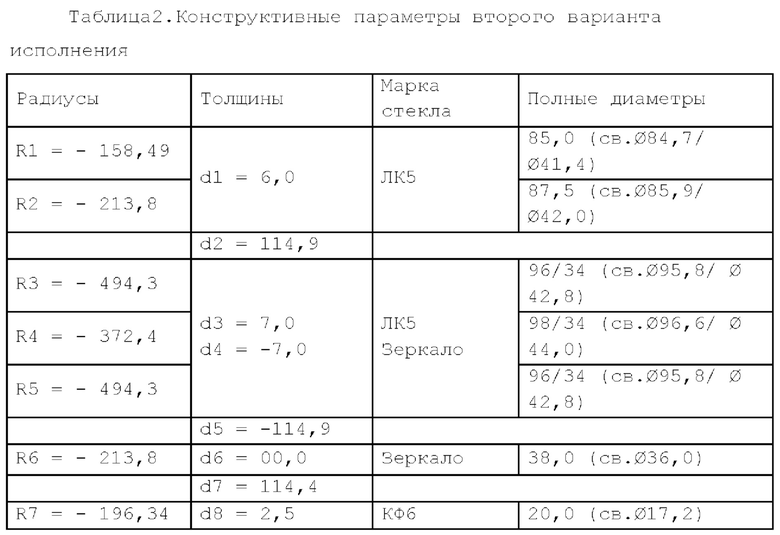
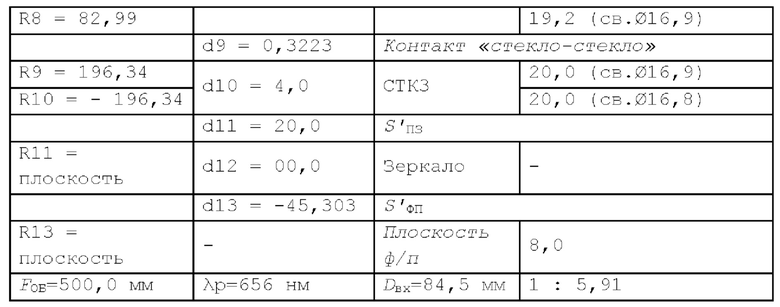
Во втором варианте в процессе фокусировки фокусное расстояние объектива (FОБ.) изменяется от 505, 061 мм для дистанции «∞» и до 458, 085 мм для дистанции 10 м. Величина максимальной подвижки отрицательного мениска 5 при фокусировке от «∞» до 10 м, равна 2,41 мм.
Схема электронного нивелира по варианту 3 показана на фигуре 3 с изображением градуированной марки, установленной на мишени.
Принцип действия электронного заключается в следующем.
Выравнивающие винты 1 трегера 1, 2 служат для предварительного горизонтирования корпуса 3 электронного нивелира по уровню 24.
Корпус 3 установлен с возможностью поворота вокруг вертикальной оси «O1» трегера.
В корпусе 3 электронного нивелира расположены все узлы и компоненты, необходимые для работы электронного нивелира: объектив 5, 6, 7, оптическая ось «О2» которого совпадает с осью визирования, корпус объектива 23, плоское зеркало 8, матричный фотоприемник 9, компьютер обработки данных 14, датчик внешней освещенности 19, элементы маятникового механизма 10, 11, 12, 13, демпфер маятника 17, 18 и уровень 24.
Повышение точности измерений достигается увеличением фокусного расстояния объектива 5, 6, 7 до значения, например ~500 мм, и применением матричного фотоприемника 9 с малым размером пикселя, например ~1,55 мкм.
Параметры варианта телевизионного модуля на базе КМОП фотоприемнике IMX477R(Camera Module, CSI-2 with 12 Megapixels Resolution, Производитель: Raspberry Pi, https://rs-catalog.ru/2012852.html) приведены в таблице 3.
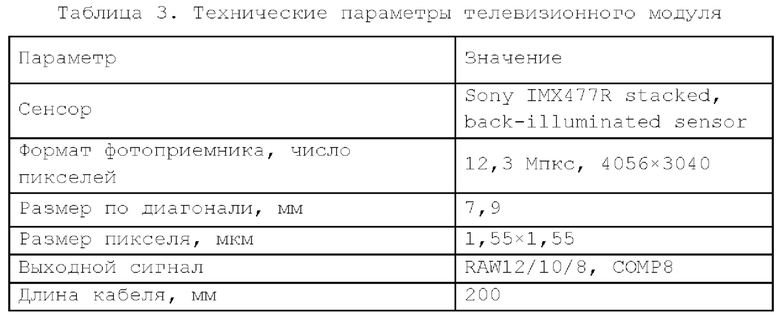
Достигаемая точность измерений электронным нивелиром в этом случае ограничивается теоретическим значением, равным ~0,6ʺ. Влияние дисторсии незначительно, собственно дисторсия определяется разницей идеального и аберрационного размеров изображения, которая для края поля зрения составляет ~0,0026 мм (~2,6 мкм). На рабочем участке изображения, где в основном осуществляются точные координатные измерения - на половине поля зрения, дисторсия составляет ~0,0003 мм (~0,3 мкм), что значительно меньше размера пикселя матричного фотоприемника 9, равного 1,55 мкм, и практически не оказывает влияния на точность координатных измерений. На краю поля зрения возможно применение программной коррекции дисторсии для обеспечения доказанной оценки точности получаемых значений.
Сохранение малых габаритных размеров объектива (осевой размер объектива равен ~133 мм при фокусном расстоянии объектива, равном ~500 мм) достигается выполнением его на основе зеркально-линзовой схемы менискового телеобъектива Максутова (авторское свидетельство №382046, опубл. 22.05.1973).
Объектив содержит отрицательный мениск 5, кольцевая центральная зона на второй поверхности которого выполнена с зеркальным отражающим покрытием, главное зеркало 6, выполненное в виде зеркала Манжена, и коррекционный компонент 7, выполненный в виде отрицательной выпукловогнутой линзы, обращенной выпуклостью к предмету. Отрицательный мениск 5 установлен с возможностью подвижки вдоль оптической оси объектива для фокусировки на дистанцию. Фокусировка осуществляется фокусировочным приводом 22, передающим вращение через зубчатую передачу 21 на оправу 20 отрицательного мениска 5, чем обеспечивается осевое перемещение оправы 20 с отрицательным мениском 5 относительно неподвижного корпуса объектива 23 за счет резьбового соединения оправ 20 и 23 между собой. Оправа 23 при этом жестко соединена с корпусом 3 электронного нивелира.
Компьютер обработки данных 14 осуществляет прием изображения с матричного фотоприемника 9, прием данных от датчика внешней освещенности 19, обработку принятых данных и вычисления по специализированной программе, а также вывод результатов расчетов и изображения градуированной марки, установленной на мишени, на экран 15 со светозащитным козырьком 16.
Компьютер обработки данных 14 может быть выполнен в виде одноплатного компьютерного модуля типа Raspberry-Pi-4 (или его аналогов), оснащенного 4-х ядерным 64-х разрядным процессором (производитель Raspberry Pi https://www.raspberrypi.org/products/raspberry-pi-4-model-b/) с размером платы 56×85 мм. Датчик внешней освещенности 19 может быть выполнен на основе датчика окружающего света VEML7700 производителя Vishay Semiconductors (www.vishay.com), no сигналам которого компьютер обработки данных 14 осуществляет автоматическую регулировку яркости экрана 15 и программные настройки (управление драйвером) фотоприемника 9. Экран 15 может быть выполнен на основе ЖК дисплейного модуля LI48320T035IB3098 производителя DWIN Technologies (www.dwin-global.com) формата 320X480 пикселей с габаритными размерами 54,5×83×2,1 мм.
Плоское зеркало 8 обеспечивает точную компенсацию наклона визирной оси электронного нивелира собственными колебаниями вокруг оси «O5», осуществляя при этом способ компенсации наклона поворотом визирного луча в сходящихся пучках лучей (Яковлев В.Н. Высшая геодезия: Учебник для вузов. - М.: Недра, 1989). Колебания плоского зеркала8синхронизированы с колебаниями рычага 10 маятника вокруг оси вращения «О4» которая параллельна оси вращения «О5».
Диск 11 маятника, жестко установленный на рычаге 10 маятника соосно с осью «О4», соединен нитью 13 с диском 12 плоского зеркала 8, жестко установленным на плоском зеркале 8 соосно с осью «О5».
Диаметры дисков 11 и 12 выбираются с учетом известного условия основного уравнения компенсатора. Плоское зеркало 8 - компенсатор наклона визирной оси в вертикальной плоскости, установлено в среднем положении под углом 45° к оптической оси объектива и отражает выходящие из объектива пучки лучей на матричный фотоприемник 9 в направлении «О2», при этом выполняется следующее соотношение:

где:
DОБ - диаметр входного зрачка объектива 5, 6 и 7 электронного нивелира;
S'ПЗ - расстояние по оптической оси между коррекционным компонентом 7 объектива и осью «О5» вращения плоского зеркала 8;
S'ФП _ расстояние между осью «О5» вращения плоского зеркала 8 и чувствительной плоскостью матричного фотоприемника 9 по отраженной от плоского зеркала 8 оптической оси «О3»;
FОБ - фокусное расстояние объектива 5, 6 и 7 электронного нивелира.
Выполнение этого соотношения позволяет повысить точность компенсации наклона линии визирования в вертикальной плоскости и обеспечить малогабаритность конструкции электронного нивелира.
Значение углового увеличения «К» компенсатора (Яковлев В.Н. Высшая геодезия: Учебник для вузов. - М.: Недра, 1989, стр. 283) определяется соотношением FОБ/S'ФП и по данным из таблицы 1 будет равно К=10,906 (500,8/45,3164). Необходимая величина коэффициента «К» достигается оптико-механическим способом, который в данном случае характеризуется коэффициентами оптической «КО» и механической «КМ» компенсации (К=КО⋅КМ). Известно, что при угловом развороте зеркала 8 падающий на него луч отражается на угол, в 2 раза больший, чем угол поворота этого зеркала, т.е. коэффициент оптической компенсации в этом случае известен и равен величине КО=2. Тогда коэффициент механической компенсации должен быть равен КМ=5,453 (10,906/2) и его реализация осуществляется механизмом из двух дисков 11 и 12 разного диаметра.
Диск 11 закреплен на оси «О4» рычага 10 маятника, диск 12 закреплен на оси «О5» плоского зеркала 8. Соединенные ленточной передачей нитью 13 диски 11 и 12 обеспечивают необходимый коэффициент механической компенсации за счет отношения размеров их диаметров (D11/D12), которые могут быть равными, например, величинам D11=38,171 мм и D12=7 мм. Этими значениями будет обеспечено значение КМ=5,453 (38,171/7).
Нить 13 ленточной передачи может быть выполнена, например, из стальной проволоки диаметром ∅0,1 мм, применяемой для подвеса качающихся зеркал нивелиров (Елисеев С.В. Геодезические инструменты и приборы. Основы расчета, конструкции и особенности изготовления. Изд. 3-е, перераб. и доп. М., Недра, 1973, стр. 363).
Таким образом, при наклоне электронного нивелира, например, на угол «7,5'» изображение горизонтального луча сместится с центра матричного фотоприемника 9, а рычаг 10 физического маятника, оставаясь вертикальным, повернет диск 11 также на угол 7,5', а диск 12 и соответственно плоское зеркало 8 компенсатора повернутся относительно точки «О5» на угол 7,5'⋅5,453=40,8975' за счет разности диаметров дисков 11 и 12 и соединения их нитью 13. Тогда отраженный от плоского зеркала 8 луч повернется на угол «81,795'»(40,8975'⋅2), совмещая горизонтальный луч, входящий в нивелир, с центром матричного фотоприемника 10, за счет обеспечения требуемого углового увеличения компенсатора, составляющего значение К=10,906 (81,795'/7,5').
Гашение колебаний рычага 10 физического маятника осуществляется в варианте апериодического воздушного демпфирования с использованием поршня 17 и кронштейна с цилиндром 18 демпфера, за счет зазора между поршнем 17 и стенками цилиндра 18 величиной 0,3 мм (Елисеев С.В. Геодезические инструменты и приборы. Основы расчета, конструкции и особенности изготовления. Изд. 3-е, перераб. и доп. М., Недра, 1973, стр. 363). В компенсаторах маятникового типа с воздушным демпфированием визирный луч приводится в горизонтальное положение почти мгновенно (через 0,5 с) со средней квадратической ошибкой не более 0,05ʺ (Яковлев В.Н. Высшая геодезия: Учебник для вузов. - М.: Недра, 1989, стр. 285). Такая величина ошибки в сравнении с программным методом компенсации, зависящим от размера пикселя матричного фотоприемника 9, обеспечивает улучшение точности компенсации наклона линии визирования.
Принцип действия электронного нивелира по варианту 2 заключается в том, что коррекционный компонент объектива состоит двух линз - двояковогнутой отрицательной линзы 25 и двояковыпуклой положительной линзы 26.
Применение двухлинзового коррекционного компонента обеспечивает дополнительное уменьшение дисторсии в ~ 1,7 раза при сохранении качества оптического изображения и габаритных размеров электронного нивелира. В таком варианте исполнения разница идеального и аберрационного размеров на краю поля зрения (т.е. дисторсия) составляет ~0,0015 мм (~1,5 мкм). Уменьшение дисторсии в ~1,7 раза позволяет производить координатные измерения на всем поле зрения без программной коррекции величины дисторсии. На рабочем участке изображения, где в основном осуществляются точные координатные измерения - на половине поля зрения, дисторсия уменьшается до практически ничтожной величины в 0,0002 мм (~0,2 мкм).
Принцип действия электронного нивелира по варианту 3 заключается в том, что градуированная марка 27, установленная на мишени, выполнена по принципу двухкоординатного штрих кода 28 с дополнительными метками и точками.
Обычно применяемые градуированные марки содержат только штрих код или штрих код и контрольные метки (электронный ресурс: https://ozlib.com/1056280/geografiya/niveliry trimble eiss dini), что ограничивает возможности измерений. Градуированная марка 27 содержит двухкоординатный штрих код 28, вертикальные контрольные метки 29 и угловые контрольные точки 30, а компьютер обработки данных использует алгоритмы обработки изображения градуированной марки 27 с контролем диагоналей изображения угловых контрольных точек 30, нанесенных над углами двухкоординатного штрих кода 27. По оценке изображений вертикальных контрольных меток 29 осуществляется дополнительная компенсация углов наклона, по оценке изображений угловых контрольных точек 30 осуществляются необходимые трансформации проекции.
С помощью двухкоординатного штрих кода 28 появляется возможность брать отсчет по вертикальной оси с точностью 0,00003 миллиметра с расстояния 15 метров, например, за счет «парсинга» пикселей с оценкой точности получаемого результата на каждом разряде отчета.
С помощью вертикальных контрольных меток 29 имеется возможность контролировать угол вращения визирной оси и вносить поправки в его величину в автоматическом режиме в реальном времени.
С помощью угловых контрольных точек 30 возможно повысить точность взятия отчета и «ортотрансформировать» полученное изображение в случае малой неперпендикулярности визирной оси к плоскости измерительной марки 27 в автоматическом режиме в реальном времени.
Технические параметры вариантов исполнения электронного нивелира приведены в таблице 4.
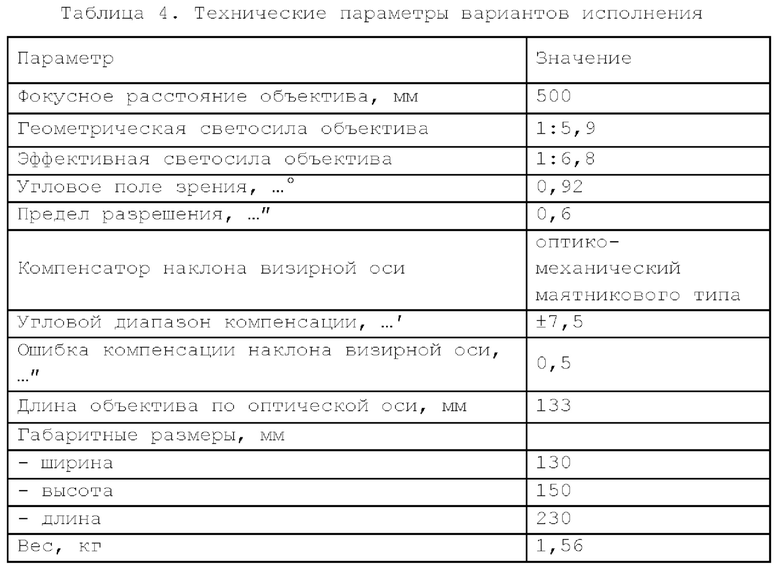
Таким образом, как показывают расчеты, электронный нивелир обеспечивает повышение точности измерений электронным нивелиром до уровня ≤1ʺ, повышение точности компенсации наклона линии визирования в вертикальной плоскости до уровня ≤0,5ʺ, обеспечивает малогабаритность конструкции электронного нивелира, а также позволяет осуществить автоматизацию выполнения работ по геодезическому и геотехническому мониторингу.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩИЙСЯ НИВЕЛИР | 1996 |
|
RU2154809C2 |
| ЛАЗЕРНЫЙ НИВЕЛИР | 2000 |
|
RU2181476C2 |
| НИВЕЛИР С САМОУСТАНАВЛИВАЮЩЕЙСЯ ЛИНИЕЙ ВИЗИРОВАНИЯ | 1994 |
|
RU2087862C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| Нивелир с самоустанавливающейся линией визирования | 1983 |
|
SU1136014A1 |
| Нивелир с самоустанавливающейся линией визирования | 1982 |
|
SU1044974A1 |
| ЗРИТЕЛЬНАЯ ТРУБА ДЛЯ ОПТИЧЕСКИХ ПРИБОРОВ | 1969 |
|
SU252633A1 |
| Компенсатор для центриров с самоустанавливающейся линией визирования | 1979 |
|
SU922508A1 |
| Автоматическое устройство для нивелирования | 1991 |
|
SU1818532A1 |
| Зеркально-линзовый объектив зрительной трубы | 1980 |
|
SU917160A1 |
Изобретение относится к геодезическим приборам и может быть использовано при выполнении работ по геодезическому и геотехническому мониторингу в автоматическом и ручном режимах, по геометрическому нивелированию, при измерениях уклонов, горизонтов, расстояний в топографии и геодезии. Электронный нивелир содержит объектив и матричный фотоприемник, выравнивающее устройство для предварительного горизонтирования электронного нивелира, привод фокусировки, компьютер обработки данных и экран со светозащитным козырьком, дополнительно - плоское зеркало-компенсатор наклона визирной оси в вертикальной плоскости, маятник, диск маятника, жестко установленный на оси вращения маятника соосно с ней и соединенный нитью с диском плоского зеркала, жестко установленным на оси вращения плоского зеркала соосно с ней, демпфер маятника, датчик внешней освещенности, причем плоское зеркало установлено в среднем положении под углом 45° к оптической оси объектива, а объектив выполнен зеркально-линзовым и содержит: отрицательный мениск, кольцевая центральная зона на второй поверхности которого выполнена с зеркальным покрытием, главное зеркало, выполненное в виде зеркала Манжена, коррекционный компонент, выполненный либо в виде отрицательной выпукловогнутой линзы, либо в виде двух линз. Технический результат - повышение точности измерений, обеспечение малогабаритности конструкции и автоматизации выполнения работ. 1 з.п. ф-лы, 3 ил., 4 табл.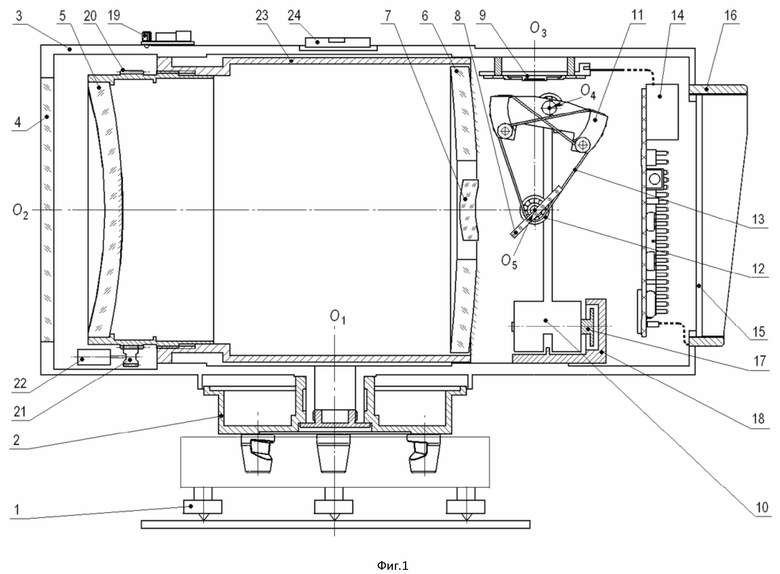
1. Электронный нивелир, содержащий:
объектив и матричный фотоприемник,
вертикальную ось, вокруг которой может поворачиваться электронный нивелир,
выравнивающее устройство для предварительного горизонтирования электронного нивелира,
привод фокусировки,
компьютер обработки данных, и
экран со светозащитным козырьком для отображения изображения градуированной марки, установленной на мишени,
отличающийся тем, что он содержит:
плоское зеркало-компенсатор наклона визирной оси в вертикальной плоскости, ось вращения которого перпендикулярна оптической оси объектива и пересекает ее,
маятник, ось вращения которого параллельна оси вращения плоского зеркала,
диск маятника, жестко установленный на оси вращения маятника соосно с ней и соединенный нитью с диском плоского зеркала, жестко установленным на оси вращения плоского зеркала соосно с ней,
демпфер маятника,
датчик внешней освещенности, причем
плоское зеркало установлено в среднем положении под углом 45° к оптической оси объектива, а объектив выполнен зеркально-линзовым и содержит:
отрицательный мениск, кольцевая центральная зона на второй поверхности которого выполнена с зеркальным покрытием,
главное зеркало, выполненное в виде зеркала Манжена,
коррекционный компонент, выполненный либо в виде отрицательной выпукловогнутой линзы, обращенной выпуклостью к предмету, либо в виде двух линз, первая из которых представляет собой двояковогнутую отрицательную линзу, а вторая - двояковыпуклую положительную линзу, при этом
отрицательный мениск установлен с возможностью подвижки вдоль оптической оси объектива, при этом выполняется следующее соотношение:

где
DОБ - диаметр входного зрачка объектива электронного нивелира;
S'ПЗ - расстояние по оптической оси между коррекционным компонентом объектива и осью вращения плоского зеркала;
S'ФП - расстояние между осью вращения плоского зеркала и чувствительной плоскостью матричного фотоприемника по отраженной от плоского зеркала оптической оси;
FОБ - фокусное расстояние объектива электронного нивелира.
2. Электронный нивелир по п. 1, отличающийся тем, что градуированная марка представляет собой двухкоординатный штрихкод, содержащий вертикальные контрольные метки и угловые контрольные точки, а компьютер обработки данных выполнен с возможностью контроля диагоналей изображения двухкоординатного штрихкода.
| US 6237235 B1, 29.05.2001 | |||
| КОДОВАЯ РЕЙКА ДЛЯ ЭЛЕКТРОННОГО НИВЕЛИРА | 2012 |
|
RU2516031C2 |
| US 5777899 A1, 07.07.1998 | |||
| RU 93042437 A, 27.05.1996 | |||
| Егоренко Марина Петровна, Ефремов Виктор Сергеевич Хроматические свойства зеркала Манжена в нескольких диапазонах спектра // Приборостроение | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| URL: | |||

