Изобретение относится к области вычислительной техники и может быть использовано в цифровых системах, автоматизированных системах, глобальных системах позиционирования и наблюдения.
Известно устройство объединения изображений в единую композицию сцены [Патент RU №2536675, МПК G06T 7/00, G06T 3/40, опубл. 27.12.2014]. Данное изобретение относится к устройству объединения изображений в единую композицию сцены. Устройство содержит соединенные между собой блок поиска контрольных точек, блок поиска соответствий, блок преобразования входных изображений, блок совмещения, блок хранения входной реализации, блок переноса контрольных точек на исходные изображения, блок детектора границ, блок поиска детализированных объектов, блок выделения детализированных областей, блок исключения ложных соответствий, блок масштабирования детализированных объектов, блок приведения к единому масштабу входных изображений, блок преобразования детализированных объектов, блок хранения выходной реализации, блок управления генератором тактовых импульсов. Данное устройство позволяет повысить точность объединения изображений разного масштаба за счет автоматического выбора преобразований детализированных объектов, определения коэффициентов масштабирования и трансформации и исключения ложных соответствий.
Недостатками устройства являются:
- невозможность производить объединение изображений, фиксируемых в инфракрасном диапазоне;
- большие вычислительные затраты.
Известно устройство бесшовного объединения изображений в единую композицию с автоматической регулировкой контрастности и градиентом [Патент RU №2580473, МПК G06T 5/00, опубл. 10.04.2016]. Изобретение относится к информационно-измерительным устройствам и может быть использовано в системах управления и обработки сигналов. Устройство бесшовного объединения изображений содержит два блока загрузки изображения, тактовый генератор, два блока поиска контрольных точек, блок поиска точек объединения, блок вычисления матриц преобразования, два блока преобразования матрицы, блок заполнения нулями, блок выделения контуров, блок вычисления кривой, три блока наложения маски, блок нахождения маски, блок выделения области объединения, блок нахождения границы объединения, блок удаления областей, два блока регулировки контрастности, два блока применения градиента, блок объединения изображений, блок вывода результата. Устройство позволяет получить объединенное изображение со сглаженными границами перехода. Недостатками устройства являются:
- появление границы между изображениями в результате объединения;
- невозможность производить объединение изображений, фиксируемых в инфракрасном диапазоне;
- появление двойных контуров объединяемых изображений. Известно устройство объединения медицинских изображений [Патент RU №2614545, МПК G06T 5/00, опубл. 28.03.2017]. Изобретение относится к информационно-измерительным устройствам и может быть использовано в вычислительной технике, в системах управления и обработки сигналов. Устройство содержит: регистр хранения входной реализации первого изображения, регистр хранения входной реализации второго изображения, тактовый генератор, блок восстановления границ первого изображения, блок фильтрации первого изображения, блок фильтрации второго изображения, блок восстановления границ второго изображения, блок поиска контрольных точек на первом изображении и соответствий, блок поиска контрольных точек на втором изображении и соответствий, блок преобразования матрицы первого изображения, блок преобразования матрицы второго изображения, блок выделения контуров на изображениях, блок нахождения границы объединения изображений, блок исключения неперекрывающихся областей на изображениях, блок наложения градиента первого изображения, блок наложения градиента второго изображения, блок объединения изображений, регистр хранения выходной реализации. Устройство позволяет получить объединенное изображение со сглаженными границами перехода. Недостатками известного устройства являются:
- в случае получения пары кадров при смещении камеры фиксации, повышается ошибка в наложении пар изображений;
- невозможность производить объединение изображений, фиксируемых в инфракрасном диапазоне;
- появление двойных контуров объединяемых изображений.
Наиболее близким к изобретению является устройство объединения инфракрасных изображений [Патент RU №2718211, МПК G06F 17/17, G06T 5/50, опубл. 31.03.2020], которое позволяет получить объединенную композицию за счет слияния пар изображений, полученных в инфракрасном диапазоне. Устройство объединения инфракрасных изображений, содержит первый и второй входы, являющиеся информационными входами устройства, которые подключены к входу регистра хранения входной реализации первого изображения и к входу регистра хранения входной реализации второго изображения, соответственно; выход регистра хранения входной реализации первого изображения подключен к входу блока фильтрации первого изображения; выход регистра хранения входной реализации второго изображения подключен к входу блока фильтрации второго изображения, регистр хранения выходной реализации, выход которого является информационным выходом устройства. Выход блока фильтрации первого изображения подключен к первому входу блока поиска базовых точек; выход блока фильтрации второго изображения подключен ко второму входу блока поиска базовых точек; первый выход блока поиска базовых точек подключен к входу блока упрощения изображений, первый выход которого подключен к входу блока поиска центров масс объектов, выход которого подключен к первому входу блока определения усредненных значений и выбора базовых точек, выход которого подключен к входу блока преобразований изображений, выход которого подключен к входу регистра хранения выходной реализации, выход которого является информационным выходом устройства; второй выход блока упрощения изображений подключен к входу блока поиска базовых точек упрощенных объектов, выход которого подключен ко второму входу блока определения усредненных значений и выбора базовых точек; второй выход блока поиска базовых точек подключен к третьему входу блока определения усредненных значений и выбора базовых точек. Данное устройство позволяет повысить скорость принятия решения и уменьшить вычислительные затраты за счет формирования комбинированных данных из пары изображений, фиксируемых в инфракрасном диапазоне. Недостатками прототипа являются:
- при объединении изображений приоритет отдается участкам с высокодетализированными объектами, которые могут находиться на одном участке изображения в следствии чего сформированные точки связи будут создавать эффект воспринимаемого оператором искажения;
- не проводилось первичной обработки изображений, позволяющей осуществить уменьшение действия шума и влиять на изменение чувствительности обнаружителя высокодеталлизированных участков;
- использование в качестве входных данных, изображений полученных в дальнем инфракрасном диапазоне и обладающих шумовой компонентой, обрабатываются сразу без учета особенностей изображения, в следствии чего, возможно появление размытия границ объектов, что приводит к неправильному объединению двух инфракрасных изображений в единое изображение.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение качества объединения изображений.
Технический результат - повышение качества объединения изображений, фиксируемых датчиками с различными сенсорами, и формирование на основе объединенных изображений единого информационного пространства.
Технический результат достигается тем, что в устройстве комплексирования изображений, полученных разнородными сенсорами, содержащем блок хранения входных данных, входы которого являются информационными входами устройства, и блок хранения выходной реализации, выход которого является выходом устройства, выход блока хранения входных данных подключен к первому входу блока определения коэффициента трансформации, первому входу блока поиска базовых точек и входу блока бинаризации изображения, выход которого подключен к входу блока размытия изображения, выход которого подключен к входу блока многокритериальный фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен ко второму входу блока поиска базовых точек, выход которого подключен ко второму входу блока определения коэффициента трансформации и входу блока многокритериальной фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен к входу блока построения маски, выход которого подключен ко второму входу блока объединения кадров, при этом к первому входу блока объединения кадров подключен выход блока определения коэффициента трансформации, выход блока объединения кадров подключен к входу блока хранения выходной реализации, выход которого является информационным выходом устройства.
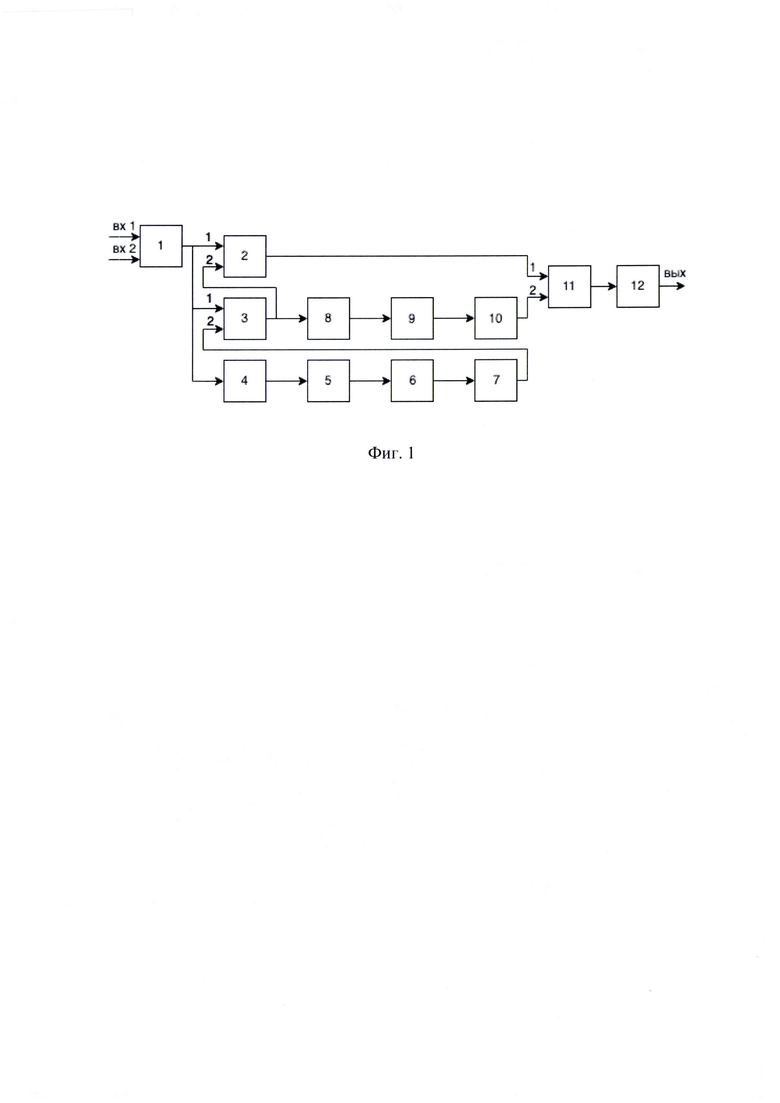
На фиг. 1 представлена блок-схема предложенного устройства.
На фиг. 2 и фиг. 3 представлены объединяемые фрагменты изображений.
На фиг. 4 представлено изображение, полученное в результате объединения пар изображений с помощью предложенного устройства, как пример осуществления изобретения.
Устройство комплексирования изображений, полученных разнородными сенсорами, содержит первый и второй входы, являющимися информационными входами устройства, которые подключены к входу блока хранения входных данных 1. Выход блока хранения входных данных 1 подключен к первому входу блока определения коэффициента трансформации 2, первому входу блока поиска базовых точек 3 и входу блока бинаризации изображения 4. Выход блока бинаризации изображения 4 подключен к входу блока размытия изображения 5. Выход блока размытия изображения 6 подключен к входу блока многокритериальный фильтрации 6. Выход блока многокритериальный фильтрации 6 подключен к входу блока поиска границ объектов 7. Выход блока поиска границ объектов 7 подключен ко второму входу блока поиска базовых точек 3. Выход блока поиска базовых точек 3 подключен ко второму входу блока определения коэффициента трансформации 2 и входу блока многокритериальной фильтрации 8. Выход блока многокритериальной фильтрации 8 подключен к входу блока поиска границ объектов 9. Выход блока поиска границ объектов 9 подключен к входу блока построения маски 10. Выход блока построения маски 10 подключен ко второму входу блока объединения кадров 11. Выход блока определения коэффициента трансформации 2 подключен к первому входу блока объединения кадров 11. Выход блока объединения кадров 11 подключен к входу блока хранения выходной реализации 12. Выход блока хранения выходной реализации 12 является информационным выходом устройства.
Предлагаемое устройство комплексирования изображений позволяет получить объединенную композицию за счет слияния пар изображений, фиксируемых различными сенсорами. Комплексирование данных различной физической природы, поступающих с различных сенсоров, позволяет рассматривать эти данные как элементы единого информационного пространства. Устройство реализует следующий алгоритм. 1. Загрузка и анализ данных.
1.1 На данном этапе производится выделение или считывание основных параметров устройства. В качестве такой информации выступают: скорость фиксирования кадров (для видео); размер кадра или данных (m - количество элементов в строке,  - количество элементов в столбце, k - глубина данных); тип данных и их представления (одно или многоканальные). Производится расчет гистограмм цветовых градиентов, пример описан в работе [Валюх А.А., Тонкошкур Ю.О. Алгоритм поиска изображений на основе гистограмм. - 2019.]. Определение среднего, максимального и минимального значения.
- количество элементов в столбце, k - глубина данных); тип данных и их представления (одно или многоканальные). Производится расчет гистограмм цветовых градиентов, пример описан в работе [Валюх А.А., Тонкошкур Ю.О. Алгоритм поиска изображений на основе гистограмм. - 2019.]. Определение среднего, максимального и минимального значения.
1.2 Формирование матрицы предобработки необходимой для совмещения пар изображений и необходимых для компенсации в работе оптических систем, а также различий в положении фокальных осей сенсоров. Для определения компенсационной матрицы может быть использован подход описанный в работе [Khamidullin I.V., Voronina S.V., Balabaeva О.S., Gavlicky A.I., & Semenishchev E.A. "Development of an algorithm for the calibration of optical and thermal cameras into a unified machine vision system and its software implementation," In IOP Conference Series: Materials Science and Engineering, Vol. 1029, No. 1, p. 012118 (2021)] или [Кульчицкий A.A., Абакумов И.И. Исследование моделей калибровки камер технического зрения для программной компенсации искажений в системах контроля геометрических параметров объектов // Инновационная наука. - 2015. -№10-1. - С. 86-90.]. Представленный в данной работе алгоритм апробирован на построении матрицы преобразования изображения фиксируемого в инфракрасном диапазоне для совмещения с данными видимого спектра.
2. Разделение данных на каналы обработки, могут быть выбраны оператором или разделены по всем веткам обработки одновременно. В случае параллельного анализа всех данных, повышаются требования к вычислительным параметрам устройства.
2.1 Для фото- и видеоданных, производится произвольный выбор точки (пикселя) с максимальной или минимальной интенсивностью.
2.2 Выполнение операции бинаризации. Операция может быть построена на уменьшении размаха кластеров с доведением количества уровней анализа до двух, описано в работе [Semenishchev Е., Voronin V., Shraifel I. «The solution of the problem of simplifying the images for the subsequent minimization of the image bit depth» / WSCG 2018: poster papers proceedings: 26th International Conference in Central Europe on Computer Graphics, Visualization and Computer Visionin co-operation with EUROGRAPHICS Association, p.67-72.] или применением подходов, например описанных в работах [Вдовин В.А., Муравьев А.В., Певзнер А.А. Метод адаптивной бинаризации растрового изображения // Ярославский педагогический вестник. - 2012. - Т. 3. - №4. - С. 65-69.] или [Чуриков А.Ю. Метод адаптивной бинаризации в реальном времени изображений со слабой контрастностью // Вестник Балтийского федерального университета им. И. Канта. Серия: Физико-математические и технические науки. - 2010. - №10. - С. 74-78.].
2.3 Размытие изображения. Для данной операции могут быть использованы различные подходы, такие как используемый нами [Семенищев Е.А. и др. Многокритериальный метод сглаживания двумерных сигналов в условиях ограниченного объема априорной информации // Успехи современной радиоэлектроники. - 2012. - №. 6. - С. 35-39] или [МЫЦКИХ-КОРОБАНОВ А.Ю. Алгоритм размытия по гауссу // Математика и ее приложения в современной науке и практике. - 2018. - С. 40-45], [Калиниченко Ю.В., Ищенко Я.С. Алгоритм быстрого размытия по Гауссу // Сборник научных трудов SWORLD. - 2012. - №. 4. - С. 83].
2.4 Использование многокритериального метода сглаживания для поиска границ резких изменений. Описание метода и его применение для обнаружения резких изменений функции сигнала описано в работе [Семенищев Е. А., Марчук В. И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. - №5. - С. 92-101.]. В качестве параметров обработки метода использованы коэффициенты α=β=9,7. Может быт применен альтернативный метод фильтрации, например описанный [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring // IEEE Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728] или [Белявцев В.Г, Воскобойников Ю.Е. Алгоритмы фильтрации изображений с адаптацией размеров апертуры // Автометрия. - 1998. - №. 3. - С. 18-27].
2.5 Поиск границ объектов на изображениях. Для выбранного элемента массива выбирается восемь направлений анализа (диагональные, горизонтальные и вертикальные) с началом в выбранной точке. Пример построения таких систем, например, рассмотрен в работах [Katkovnik, V. "Discrete-time local polynomial approximation of the instantaneous frequency," IEEE Transactions on Signal Processing, 46(10), 2626-2637 (1998).], [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring // IEEE Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728.] или [Хамдамов У.P., Умаров M.А., Умаров X.А. Методы определения объектов на изображении // Вестник науки. - 2019].
2.6 В результате работы метода формируется граница, разделяющая изображения на области. В случае разрыва границы используется алгоритм закрытия контуров, пример реализации такого алгоритма описан в работе [Гвоздецкий Е.А., Элчибекова Б.М., Емельяненко Н.Ю. «Кластеризация изображения на основе оценки геометрической формы объектов» // Прикладная математика и информатика: современные исследования в области естественных и технических наук. - 2019. - С. 502-506.].
3. Поиск базовых точек. В качестве данных используются входные изображения и результаты, формируемые веткой 2 алгоритма. Выполнение фильтрации изображений на основе многокритериального метода внутри замкнутых областей, заданных веткой 2 алгоритма [Семенищев Е.А., Марчук B.И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. - №. 5. - С. 92-101]. В качестве параметров обработки метода использованы коэффициенты α=β=5,8.
4. По данным отфильтрованных изображений производится повторный поиск границ объектов, при этом используется подход аналогичный пункту 2.5.
5. Сформированная граница в пункте 3 алгоритма линеаризуется и закрывается в случае открытых контуров. Этап аналогичен пункту 2.6 алгоритма.
6. В качестве точек аффинных преобразований над изображениями используются данные сравнения контуров, полученных для каждого из изображений. В качестве точек растяжения изображения выбираются максимально разнесенные элементы маски.
7. Объединение изображений. В качестве алгоритма слияния применяется подход, описанный в работе [Семенищев Е.А., Толстова И.В., Катков Д.Н. «Исследования алгоритма объединения изображений с автоматической коррекцией цвета» // Е.А. Семенищев, И.В. Толстова, Д.Н. Катков / Teoretical & Applied Science/" Theoretical Research", Materials of the International Practical Conference. - 2013. - №. 7. - C. 60-65], [Семенищев E.A., Толстова И.В., Торопов И.А. Разработка и исследование алгоритма объединения изображений с использованием метода поиска высокодетализированных областей // Успехи современной радиоэлектроники. - 2013. - №. 5. - С. 064-067] или [Применко Д.В., Панищев В.С, Чернецкая И.Е. «Алгоритм построения панорамных изображений» // Медико-экологические информационные технологии-2020. - 2020. - С. 77-81].
8. Запись полученного изображения и вывод результата.
Устройство комплексирования изображений, полученных разнородными сенсорами, работает следующим образом. На первый и второй входы, являющиеся информационными входами устройства, которые подключены к входу блока хранения входных данных 1, поступают два изображения. В блоке хранения входных данных 1 производится выделение или считывание основных параметров устройства. В качестве такой информации выступают: скорость фиксирования кадров (для видео); размер кадра или данных (m - количество элементов в строке,  - количество элементов в столбце, k - глубина данных); тип данных и их представления (одно или многоканальные). Далее изображения поступают на первый вход блока определения коэффициента трансформации 2, первый вход блока поиска базовых точек 3 и вход блока бинаризации изображения 4. Блок определения коэффициента трансформации 2 осуществляет расчет и формирование матрицы предобработки, необходимой для совмещения пар изображений. Данный расчет необходим для компенсации в работе оптических систем, а также различий в положении фокальных осей сенсоров. Для определения компенсационной матрицы может быть использован подход описанный в работе [Khamidullin I.V., Voronina S.V., Balabaeva О.S., Gavlicky A.I., & Semenishchev E.A. "Development of an algorithm for the calibration of optical and thermal cameras into a unified machine vision system and its software implementation," In IOP Conference Series: Materials Science and Engineering, Vol. 1029, No. 1, p. 012118 (2021)] или [Кульчицкий A.A., Абакумов И.И. Исследование моделей калибровки камер технического зрения для программной компенсации искажений в системах контроля геометрических параметров объектов // Инновационная наука. - 2015. - №10-1. - С. 86-90.]. Блок бинаризации изображения 4 может быть построен на подходе основанном на уменьшении размаха кластеров с доведением количества уровней анализа до двух, описано в работе [Semenishchev Е., Voronin V., Shraifel I. «The solution of the problem of simplifying the images for the subsequent minimization of the image bit depth» / WSCG 2018: poster papers proceedings: 26th International Conference in Central Europe on Computer Graphics, Visualization and Computer Visionin co-operation with EUROGRAPHICS Association, p. 67-72.] или применением подходов, например, описанных в работах [Вдовин В.А., Муравьев А.В., Певзнер А.А. Метод адаптивной бинаризации растрового изображения // Ярославский педагогический вестник. - 2012. - Т. 3. - №. 4. - С. 65-69.] или [Чуриков А.Ю. Метод адаптивной бинаризации в реальном времени изображений со слабой контрастностью // Вестник Балтийского федерального университета им. И. Канта. Серия: Физико-математические и технические науки. - 2010. -№. 10. - С. 74-78.]. Данные с выхода блока бинаризации изображения 4 поступают на вход блока размытия изображения 5. Блок размытия изображения 5 может быть реализован с использованием различных подходов, таких как используемый нами [Семенищев Е.А. и др. Многокритериальный метод сглаживания двумерных сигналов в условиях ограниченного объема априорной информации // Успехи современной радиоэлектроники. - 2012. - №. 6. - С. 35-39] или [МЫЦКИХ-КОРОБАНОВ А.Ю. Алгоритм размытия по гауссу // Математика и ее приложения в современной науке и практике. - 2018. - С. 40-45], [Калиниченко Ю.В., Ищенко Я.С. Алгоритм быстрого размытия по Гауссу // Сборник научных трудов SWOPvLD. - 2012. - №. 4. - С. 83.]. Данные с выхода блока размытия изображения 5 поступают на вход блока многокритериальный фильтрации 6, в котором осуществляется поиск границ резких изменений. Описание метода и его применение для обнаружения резких изменений функции сигнала описано в работе [Семенищев Е.А., Марчук В.И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. -№. 5. - С. 92-101.]. В качестве параметров обработки метода использованы коэффициенты α=β=9,7. Может быт применен альтернативный метод фильтрации, например, описанный [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring / ЯЕЕЕ Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728] или [Белявцев В.Г., Воскобойников Ю.Е. Алгоритмы фильтрации изображений с адаптацией размеров апертуры // Автометрия. - 1998. - №. 3. - С. 18-27]. Данные с выхода блока многокритериальный фильтрации 6 поступают на вход блока поиска границ объектов 7, в котором анализируются векторы формируемых из произвольной точки в восьми направлениях (диагональные, горизонтальные и вертикальные). Пример построения таких систем, например, рассмотрен в работах [Katkovnik, V. "Discrete-time local polynomial approximation of the instantaneous frequency", IEEE Transactions on Signal Processing, 46(10), 2626-2637 (1998).], [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring // IEEE Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728.] или [Хамдамов У.P., Умаров M.А., Умаров X.А. Методы определения объектов на изображении // Вестник науки. - 2019.]. Наряду с этим может быть применен подход детектирования границ [Нгуен К.М., Колючкин В.Я. «Алгоритмы контурной сегментации и распознавания образов объектов систем технического зрения» // Машиностроение и компьютерные технологии. - 2013. - №. 04. - С. 187-200] или [Булатов В.В. «Выделение линейных и эллипсовидных объектов на изображении на основе расчета коэффициента корреляции» // Современная наука и инновации. - 2019. - №. 2. - С. 66-73.]. В результате работы метода, формируется граница, разделяющая изображения на области. В случае разрыва границы используется алгоритм закрытия контуров, пример реализации такого алгоритма описан в работе [Гвоздецкий Е.А., Элчибекова Б.М., Емельяненко Н.Ю. «Кластеризация изображения на основе оценки геометрической формы объектов» // Прикладная математика и информатика: современные исследования в области естественных и технических наук. - 2019. - С. 502-506.]. Сформированные данные блока поиска границ объектов 7 поступают на второй вход блока поиска базовых точек 3. В блоке поиска базовых точек 3 осуществляется поиск точек совмещения для матриц аффинного преобразования по анализу входных изображений, переданных блоком хранения входных данных 1 и масок, сформированных блоком поиска границ объектов 7. В качестве точек, далее используемых в аффинных преобразованиях над изображениями, блоком определения коэффициента трансформации 2, используются данные сравнения контуров, полученных для каждого из изображений. Контуры сравниваются наложением и ищутся участки максимального совпадения. В качестве точек растяжения изображения выбираются максимально разнесенные элементы маски. Данные блока поиска базовых точек 3 поступают на второй вход блока определения коэффициента трансформации 2 и вход блока многокритериальной фильтрации 8. Блоком многокритериальной фильтрации 8 осуществляется выполнение фильтрации изображений на основе многокритериального метода внутри замкнутых областей [Семенищев Е.А., Марчук В.И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. - №5. - С. 92-101.]. В качестве параметров обработки метода использованы коэффициенты α=β=5,8. Данные из блока многокритериальной фильтрации 8 поступают на вход блока поиска границ объектов 9, блок выполняет функции аналогично блоку блок поиска границ объектов 7. Данные с выхода блока поиска границ объектов 9 поступают на вход блока построения маски 10. Работа блока построения маски 10 основана на бинаризации границ объектов и их закрытии в случае разрывов. Данные с выхода блока построения маски 10 поступают на второй вход блока объединения кадров 11. Блок объединения кадров 11 использует данные о преобразовании изображений, поступающих на второй вход блока объединения кадров 11 с выхода блока построения маски 10, и данные об обработанных кадрах, поступающих на первый вход блока объединения кадров 11 с выхода блока определения коэффициентов трансформации 2. В качестве алгоритма слияния, применяется подход, описанный в работе [Семенищев Е.А., Толстова И.В., Катков Д.Н. «Исследования алгоритма объединения изображений с автоматической коррекцией цвета» // Е.А. Семенищев, И.В. Толстова, ДН Катков /Teoretical & Applied Science/" Theoretical Research", Materials of the International Practical Conference. - 2013. - №. 7. - C. 60-65], [Семенищев E.А., Толстова И.В., Торопов И.А. Разработка и исследование алгоритма объединения изображений с использованием метода поиска высокодетализированных областей // Успехи современной радиоэлектроники. - 2013. - №. 5. - С. 064-067] или [Применко Д.В., Панищев В.С., Чернецкая И.Е. «Алгоритм построения панорамных изображений» // Медико-экологические информационные технологии-2020. - 2020. - С. 77-81]. Данные с блока объединения кадров 11 передаются на вход блока хранения выходной реализации 12. Объединенные изображения сохраняются и передаются на информационный выход устройства.
- количество элементов в столбце, k - глубина данных); тип данных и их представления (одно или многоканальные). Далее изображения поступают на первый вход блока определения коэффициента трансформации 2, первый вход блока поиска базовых точек 3 и вход блока бинаризации изображения 4. Блок определения коэффициента трансформации 2 осуществляет расчет и формирование матрицы предобработки, необходимой для совмещения пар изображений. Данный расчет необходим для компенсации в работе оптических систем, а также различий в положении фокальных осей сенсоров. Для определения компенсационной матрицы может быть использован подход описанный в работе [Khamidullin I.V., Voronina S.V., Balabaeva О.S., Gavlicky A.I., & Semenishchev E.A. "Development of an algorithm for the calibration of optical and thermal cameras into a unified machine vision system and its software implementation," In IOP Conference Series: Materials Science and Engineering, Vol. 1029, No. 1, p. 012118 (2021)] или [Кульчицкий A.A., Абакумов И.И. Исследование моделей калибровки камер технического зрения для программной компенсации искажений в системах контроля геометрических параметров объектов // Инновационная наука. - 2015. - №10-1. - С. 86-90.]. Блок бинаризации изображения 4 может быть построен на подходе основанном на уменьшении размаха кластеров с доведением количества уровней анализа до двух, описано в работе [Semenishchev Е., Voronin V., Shraifel I. «The solution of the problem of simplifying the images for the subsequent minimization of the image bit depth» / WSCG 2018: poster papers proceedings: 26th International Conference in Central Europe on Computer Graphics, Visualization and Computer Visionin co-operation with EUROGRAPHICS Association, p. 67-72.] или применением подходов, например, описанных в работах [Вдовин В.А., Муравьев А.В., Певзнер А.А. Метод адаптивной бинаризации растрового изображения // Ярославский педагогический вестник. - 2012. - Т. 3. - №. 4. - С. 65-69.] или [Чуриков А.Ю. Метод адаптивной бинаризации в реальном времени изображений со слабой контрастностью // Вестник Балтийского федерального университета им. И. Канта. Серия: Физико-математические и технические науки. - 2010. -№. 10. - С. 74-78.]. Данные с выхода блока бинаризации изображения 4 поступают на вход блока размытия изображения 5. Блок размытия изображения 5 может быть реализован с использованием различных подходов, таких как используемый нами [Семенищев Е.А. и др. Многокритериальный метод сглаживания двумерных сигналов в условиях ограниченного объема априорной информации // Успехи современной радиоэлектроники. - 2012. - №. 6. - С. 35-39] или [МЫЦКИХ-КОРОБАНОВ А.Ю. Алгоритм размытия по гауссу // Математика и ее приложения в современной науке и практике. - 2018. - С. 40-45], [Калиниченко Ю.В., Ищенко Я.С. Алгоритм быстрого размытия по Гауссу // Сборник научных трудов SWOPvLD. - 2012. - №. 4. - С. 83.]. Данные с выхода блока размытия изображения 5 поступают на вход блока многокритериальный фильтрации 6, в котором осуществляется поиск границ резких изменений. Описание метода и его применение для обнаружения резких изменений функции сигнала описано в работе [Семенищев Е.А., Марчук В.И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. -№. 5. - С. 92-101.]. В качестве параметров обработки метода использованы коэффициенты α=β=9,7. Может быт применен альтернативный метод фильтрации, например, описанный [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring / ЯЕЕЕ Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728] или [Белявцев В.Г., Воскобойников Ю.Е. Алгоритмы фильтрации изображений с адаптацией размеров апертуры // Автометрия. - 1998. - №. 3. - С. 18-27]. Данные с выхода блока многокритериальный фильтрации 6 поступают на вход блока поиска границ объектов 7, в котором анализируются векторы формируемых из произвольной точки в восьми направлениях (диагональные, горизонтальные и вертикальные). Пример построения таких систем, например, рассмотрен в работах [Katkovnik, V. "Discrete-time local polynomial approximation of the instantaneous frequency", IEEE Transactions on Signal Processing, 46(10), 2626-2637 (1998).], [Danielyan A., Katkovnik V., Egiazarian K. BM3D frames and variational image deblurring // IEEE Transactions on image processing. - 2011. - T. 21. - №. 4. - C. 1715-1728.] или [Хамдамов У.P., Умаров M.А., Умаров X.А. Методы определения объектов на изображении // Вестник науки. - 2019.]. Наряду с этим может быть применен подход детектирования границ [Нгуен К.М., Колючкин В.Я. «Алгоритмы контурной сегментации и распознавания образов объектов систем технического зрения» // Машиностроение и компьютерные технологии. - 2013. - №. 04. - С. 187-200] или [Булатов В.В. «Выделение линейных и эллипсовидных объектов на изображении на основе расчета коэффициента корреляции» // Современная наука и инновации. - 2019. - №. 2. - С. 66-73.]. В результате работы метода, формируется граница, разделяющая изображения на области. В случае разрыва границы используется алгоритм закрытия контуров, пример реализации такого алгоритма описан в работе [Гвоздецкий Е.А., Элчибекова Б.М., Емельяненко Н.Ю. «Кластеризация изображения на основе оценки геометрической формы объектов» // Прикладная математика и информатика: современные исследования в области естественных и технических наук. - 2019. - С. 502-506.]. Сформированные данные блока поиска границ объектов 7 поступают на второй вход блока поиска базовых точек 3. В блоке поиска базовых точек 3 осуществляется поиск точек совмещения для матриц аффинного преобразования по анализу входных изображений, переданных блоком хранения входных данных 1 и масок, сформированных блоком поиска границ объектов 7. В качестве точек, далее используемых в аффинных преобразованиях над изображениями, блоком определения коэффициента трансформации 2, используются данные сравнения контуров, полученных для каждого из изображений. Контуры сравниваются наложением и ищутся участки максимального совпадения. В качестве точек растяжения изображения выбираются максимально разнесенные элементы маски. Данные блока поиска базовых точек 3 поступают на второй вход блока определения коэффициента трансформации 2 и вход блока многокритериальной фильтрации 8. Блоком многокритериальной фильтрации 8 осуществляется выполнение фильтрации изображений на основе многокритериального метода внутри замкнутых областей [Семенищев Е.А., Марчук В.И. Сглаживание сигналов на основе объединенного критерия среднего квадрата конечной разности второго порядка и минимума среднеквадратического отклонения // Известия Южного федерального университета. Технические науки. - 2009. - Т. 94. - №5. - С. 92-101.]. В качестве параметров обработки метода использованы коэффициенты α=β=5,8. Данные из блока многокритериальной фильтрации 8 поступают на вход блока поиска границ объектов 9, блок выполняет функции аналогично блоку блок поиска границ объектов 7. Данные с выхода блока поиска границ объектов 9 поступают на вход блока построения маски 10. Работа блока построения маски 10 основана на бинаризации границ объектов и их закрытии в случае разрывов. Данные с выхода блока построения маски 10 поступают на второй вход блока объединения кадров 11. Блок объединения кадров 11 использует данные о преобразовании изображений, поступающих на второй вход блока объединения кадров 11 с выхода блока построения маски 10, и данные об обработанных кадрах, поступающих на первый вход блока объединения кадров 11 с выхода блока определения коэффициентов трансформации 2. В качестве алгоритма слияния, применяется подход, описанный в работе [Семенищев Е.А., Толстова И.В., Катков Д.Н. «Исследования алгоритма объединения изображений с автоматической коррекцией цвета» // Е.А. Семенищев, И.В. Толстова, ДН Катков /Teoretical & Applied Science/" Theoretical Research", Materials of the International Practical Conference. - 2013. - №. 7. - C. 60-65], [Семенищев E.А., Толстова И.В., Торопов И.А. Разработка и исследование алгоритма объединения изображений с использованием метода поиска высокодетализированных областей // Успехи современной радиоэлектроники. - 2013. - №. 5. - С. 064-067] или [Применко Д.В., Панищев В.С., Чернецкая И.Е. «Алгоритм построения панорамных изображений» // Медико-экологические информационные технологии-2020. - 2020. - С. 77-81]. Данные с блока объединения кадров 11 передаются на вход блока хранения выходной реализации 12. Объединенные изображения сохраняются и передаются на информационный выход устройства.
Применение предлагаемого устройства комплексирования изображений, полученных разнородными сенсорами, позволяет повысить скорость принятия решения за счет формирования более качественных объединенных изображений, фиксируемых с разных датчиков, и создать единое информационное пространство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для объединения изображений | 2023 |
|
RU2816295C1 |
| УСТРОЙСТВО ОБЪЕДИНЕНИЯ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2614545C1 |
| УСТРОЙСТВО ПОИСКА СРЕДНЕЙ ЛИНИИ ГРАНИЦ ОБЪЕКТОВ НА РАЗМЫТЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2622877C1 |
| Устройство объединения инфракрасных изображений | 2019 |
|
RU2718211C1 |
| УСТРОЙСТВО ОБЪЕДИНЕНИЯ ИЗОБРАЖЕНИЙ В ЕДИНУЮ КОМПОЗИЦИЮ СЦЕНЫ | 2013 |
|
RU2536675C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА АРХИВНЫХ ФОТОГРАФИЯХ | 2013 |
|
RU2541920C2 |
| УСТРОЙСТВО РЕДАКТИРОВАНИЯ ВИДЕОПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2014 |
|
RU2572377C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ВИДЕОСИГНАЛАХ | 2013 |
|
RU2535449C2 |
| СПОСОБ И СИСТЕМА СВЕРХРАЗРЕШЕНИЯ С ПОМОЩЬЮ КОМБИНИРОВАННОЙ РАЗРЕЖЕННОЙ АППРОКСИМАЦИИ | 2016 |
|
RU2661537C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
Изобретение относится к области вычислительной техники. Технический результат направлен на повышение качества и скорости принятия решения для формирования объединенных изображений. Устройство для комплексирования изображений, полученных разнородными сенсорами, содержит блок хранения входных данных, входы которого являются информационными входами устройства, и блок хранения выходной реализации, выход которого является выходом устройства, выход блока хранения входных данных подключен к первому входу блока определения коэффициента трансформации, первому входу блока поиска базовых точек и входу блока бинаризации изображения, выход которого подключен к входу блока размытия изображения, выход которого подключен к входу блока многокритериальный фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен ко второму входу блока поиска базовых точек, выход которого подключен ко второму входу блока определения коэффициента трансформации и входу блока многокритериальной фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен к входу блока построения маски, выход которого подключен ко второму входу блока объединения кадров. 4 ил.
Устройство комплексирования изображений, полученных разнородными сенсорами, содержащее блок хранения входных данных, входы которого являются информационными входами устройства, и блок хранения выходной реализации, выход которого является выходом устройства, отличающееся тем, что выход блока хранения входных данных подключен к первому входу блока определения коэффициента трансформации, первому входу блока поиска базовых точек и входу блока бинаризации изображения, выход которого подключен к входу блока размытия изображения, выход которого подключен к входу блока многокритериальный фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен ко второму входу блока поиска базовых точек, выход которого подключен к второму входу блока определения коэффициента трансформации и входу блока многокритериальной фильтрации, выход которого подключен к входу блока поиска границ объектов, выход которого подключен к входу блока построения маски, выход которого подключен ко второму входу блока объединения кадров, при этом к первому входу блока объединения кадров подключен выход блока определения коэффициента трансформации, выход блока объединения кадров подключен к входу блока хранения выходной реализации, выход которого является информационным выходом устройства.
| Устройство объединения инфракрасных изображений | 2019 |
|
RU2718211C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ЦИФРОВЫХ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2540778C1 |
| Способ комплексирования цифровых полутоновых изображений нескольких диапазонов оптического спектра | 2021 |
|
RU2775592C1 |
| УСТРОЙСТВО ОБЪЕДИНЕНИЯ ИЗОБРАЖЕНИЙ В ЕДИНУЮ КОМПОЗИЦИЮ СЦЕНЫ | 2013 |
|
RU2536675C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| US 8385680 B2, 26.02.2013. | |||

