Изобретение относится к сельскохозяйственному машиностроению, в частности к высевающему аппарату кассетных сеялок для посева на втором и третьем этапах селекционных работ.
Известна селекционная сеялка СКС-6А для рядового посева семян зерновых, зернобобовых и крупяных культур на делянках 2-го этапа селекционных работ с приводом конусного высевающего аппарата от вала отбора мощности самоходного шасси, оборудованная кассетным загрузочным устройством (КЗУ), позволяющим засевать делянки по заданной программе с автоматической подачей кассет с установленного блока, при этом установку нового блока кассет осуществляет оператор (В.И. Анискин, Ю.Ф. Некипелов. Механизация опытных работ в селекции, сортоиспытании и первичном семеноводстве зерновых и зернобобовых культур. Москва, 2004. С.39-41).
Известна сеялка с устройством для автоматизации процесса высева семян (патент РФ на изобретение, патент RU 2789549, МПК A01C 7/00, A01C 7/08, 2022), включающем энкодер на ведомых колесах, конусный высевающий аппарат с выходным валом и приводом от шагового электродвигателя, соленоид дозатора, установленный на высевающем аппарате, кассету с ячейками, электродвигатель для ее перемещения и датчик ее положения, связанные с блоком управления. Оно предназначено для управления дозирующей системой высева семян кассетной селекционной сеялки. Блок управления связан с шаговым двигателем высевающего аппарата и двигателем постоянного тока привода распределительного стола посредством драйверов управления коллекторными двигателями. Подача кассет к высевающему аппарату выполняется автоматически при помощи привода распределительного стола, а в процессе работы сеялки замену кассет осуществляет оператор.
Достоинством известных устройств является то, что они оснащены кассетным загрузочным устройством, подающим кассеты с семенами к высевающему аппарату селекционной сеялки в автоматическом режиме.
Наиболее близким по техническому решению к предлагаемому устройству является выбранное в качестве прототипа роботизированное кассетное загрузочное устройство карусельного типа селекционной сеялки (патент РФ на изобретение, патент RU 2806909, МПК A01C 7/02, 2023).
Достоинством известного устройства является то, что кассетное загрузочное устройство для перемещения кассет с семенами к высевающим аппаратам роботизировано.
Недостатком известных кассетных загрузочных устройств является то, что они предназначены для установки на определенную сеялку и не оснащены достаточным количеством кассет с семенами для выполнения посева на 3-м этапе селекционных работ.
Технической задачей предполагаемого изобретения является обеспечение возможности использования робота на сеялках с механическим и электрическим приводом, увеличить количество кассет с семенами для посева на 2-ом и 3-ем этапе селекционных работ.
Технический результат заключается в повышении производительности, сокращении ручного труда, снижении простоев сеялки для перезагрузки блоков кассет с семенами.
Технический результат достигается тем, что робот для подачи семян карусельного типа селекционной сеялки, включающий блок управления, кассеты с ячейками, манипулятор с рамой, на которой размещены механизм для перемещения кассет и датчик положения кассет, платформы, одна из которых - центральная неподвижная с актуатором и толкателем, установленным на противоположной от высевающего аппарата стороне в зоне перемещения кассет с семенами, другая - внешняя подвижная с приводом от шагового электродвигателя, согласно изобретению снабжен датчиком вращения, размещаемым на валу высевающего аппарата, внешняя подвижная многоуровневая платформа с блоками кассет выполнена с возможностью поочередного вертикального перемещения каждого уровня в рабочую зону при помощи дополнительного актуатора, размещенного на раме манипулятора, при этом актуатор установлен с возможностью тактовой подачи кассет в рабочей зоне к выгрузному отверстию под контролем датчика вращения.
Изобретение поясняется чертежами.
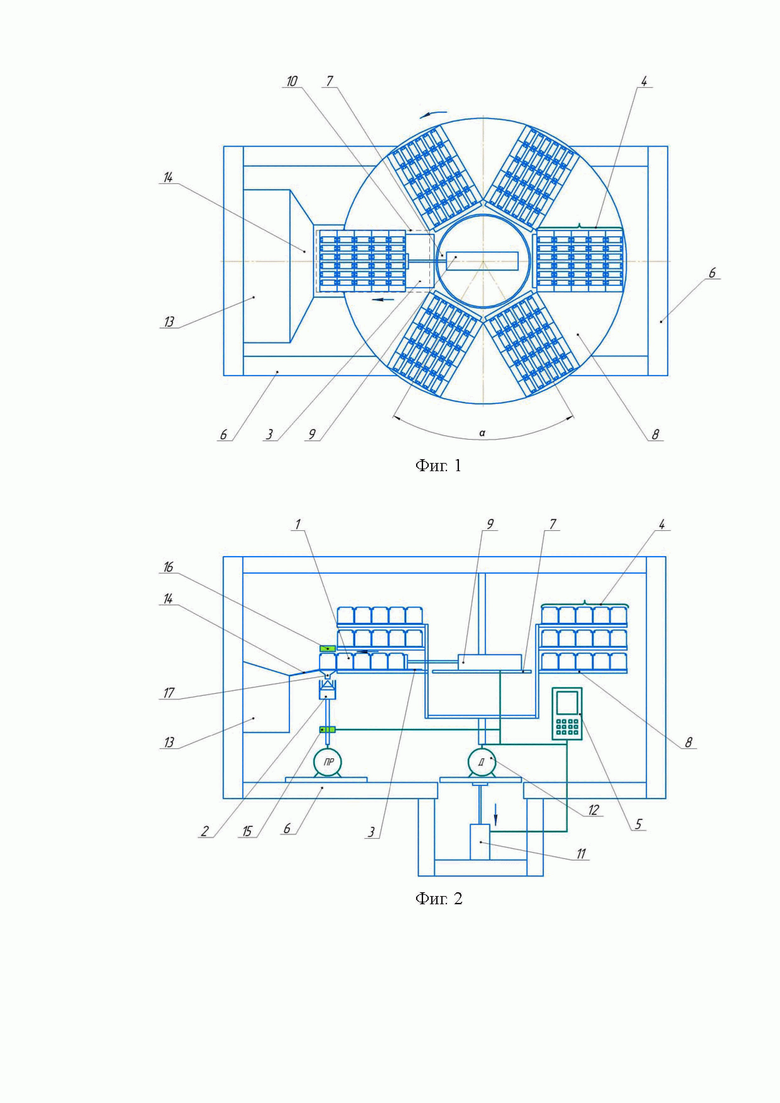
На фиг.1 представлен робот для подачи семян, вид сверху; на фиг.2 - то же, вид сбоку.
Устройство - робот для подачи семян (РПС) карусельного типа - содержит манипулятор с программным управлением для перемещения кассет 1 с ячейками для семян к высевающему аппарату 2. Кассеты 1 с пазами последовательно нанизаны на направляющую пластину 3 и образуют блок 4 кассет 1.
Манипулятор представляет собой механизм с тремя степенями свободы (подвижности) в виде карусели для перемещения кассет 1 в заданном направлении. Манипулятор работает под контролем блока управления 5.
На раме 6 расположены центральная неподвижная 7 и внешняя подвижная многоуровневая платформы 8.
Актуатор 9 с толкателем установлен на центральной неподвижной платформе 7 на противоположной от высевающего аппарата 2 стороне в рабочей зоне 10 перемещения кассет 1.
Дополнительный актуатор 11 установлен под многоуровневой подвижной платформой 8 и служит для ее опускания на один уровень в рабочую зону 10.
На каждом уровне внешней подвижной платформы 8, приводимой в движение шаговым электродвигателем 12, равномерно устанавливают по окружности и фиксируют блоки 4 кассет 1.
Электродвигатель 12 и актуаторы 9 и 11 приводятся в действие блоком управления 5 по заданной программе в соответствии с планом засева селекционных делянок.
Контейнер 13 с наклонным лотком 14 установлен на раме 6 за высевающим аппаратом 2 и предназначен для сбора пустых (освобожденных от семян) кассет 1.
На валу высевающего аппарата 2 установлен датчик вращения 15 вала высевающего аппарата, который связан с блоком управления 5.
В рабочей зоне 10 над первой в очереди кассетой 1 располагается датчик положения 16 кассет 1.
Робот для подачи семян карусельного типа работает следующим образом.
Перед началом работы селекционер устанавливает и фиксирует на подвижной многоуровневой платформе 8 блоки 4 кассет 1 с семенами в количестве, достаточном для посева селекционного участка.
Сеялку подводят к линии начала делянки, оператор включает блок управления 5, сеялка начинает движение. В момент начала вращения вала высевающего аппарата, по заданной блоком управления 5 программе, датчик вращения 15 передает сигнал на актуатор 9, толкатель выдвигается и последовательно перемещает по направляющей пластине 3 кассеты 1 с семенами к высевающему аппарату 2. Семена подаются в высевающий аппарат 2 через выгрузные отверстия распределителя 17. Пустая кассета 1 сходит по наклонному лотку 14 и попадает в контейнер 13. По сигналу датчика вращения 15, расположенного на валу высевающего аппарата, кассеты 1 в тактовом режиме подаются актуатором 9 к выгрузным отверстиям распределителя 17. После схода всех кассет 1 с направляющей пластины 3 срабатывает датчик положения 16, и толкатель актуатора 9 возвращается в исходное положение.
Шаговый электродвигатель 12 поворачивает внешнюю подвижную платформу 8 на угол, величина которого зависит от количества блоков 4 кассет 1. Следующий кассетный блок 4 перемещается в рабочую зону 10.
Далее процессы подачи кассет 1 к высевающему аппарату 2 толкателем актуатора 9 и перемещения кассетных блоков 4 на текущем уровне подвижной платформы 8 повторяются.
После освобождения всех кассетных блоков 4 на текущем уровне от кассет 1 с семенами блок управления 5 подает сигнал о необходимости опускания на один уровень подвижной платформы 8 с блоками 4 кассет 1 при помощи дополнительного актуатора 11.
Процессы подачи кассет 1 с семенами, перемещения блоков 4 кассет 1 и перемещения на уровень вниз подвижной платформы 8 с установленными на ней блоками 4 кассет 1 продолжаются до тех пор, пока на платформе 8 не останется ни одной кассеты 1 с семенами.
В случае застревания кассет 1 в рабочей зоне 10, датчик положения 16 передает сигнал в блок управления 5 о необходимости остановки сеялки. Оператор устраняет причину неисправности, и сеялка продолжает работу.
После засева всех делянок, соответствующих количеству кассет 1 с семенами, процесс высева считается законченным.
Предложенное устройство позволит роботизировать подачу семян в высевающий аппарат селекционной кассетной сеялки, с возможностью его установки как на сеялку с механическим приводом высевающего аппарата, так и на сеялку с электроприводом, а также обеспечит достаточное количество кассет с семенным материалом для посева на 3-м этапе селекционных работ.
Использование робота позволит повысить производительность, сократить ручной труд, снизить простои сеялки для перезагрузки блоков кассет с семенами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированное кассетное загрузочное устройство карусельного типа селекционной сеялки | 2023 |
|
RU2806909C1 |
| Роботизированное кассетное загрузочное устройство селекционной сеялки | 2023 |
|
RU2807037C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2014 |
|
RU2573765C1 |
| Устройство для автоматизации процесса высева семян | 2022 |
|
RU2789549C1 |
| Сеялка для капсульного посева сельхозкультур | 2020 |
|
RU2736060C1 |
| Сеялка для посева зерновых культур колосьями | 2019 |
|
RU2697498C1 |
| СЕЛЕКЦИОННАЯ СЕЯЛКА ДЛЯ ПОСЕВА СЕМЯН В КАССЕТЫ | 1998 |
|
RU2144756C1 |
| Сеялка с дисковыми кассетами для посева сельхозкультур | 2022 |
|
RU2784081C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2460268C1 |
| СЕЛЕКЦИОННАЯ СЕЯЛКА | 1971 |
|
SU312563A1 |
Изобретение относится к области сельскохозяйственного машиностроения. Робот содержит блок управления (5), кассеты (1) с ячейками, манипулятор с рамой (6), на которой размещены механизм для перемещения кассет и датчик положения (16) кассет (1), платформы (7 и 8). Одна из платформ (7) - центральная неподвижная с актуатором (9) и толкателем, установленным на противоположной от высевающего аппарата (2) стороне в зоне перемещения кассет с семенами. Другая платформа (8) - внешняя подвижная с приводом от шагового электродвигателя (12). Робот снабжен датчиком вращения (15), размещенным на валу высевающего аппарата (2) и связанным с блоком управления (5) и актуатором (9), дополнительным актуатором (11), установленным на раме (6) манипулятора для поочерёдного вертикального перемещения внешней подвижной многоуровневой платформы (8) с блоками (4) кассет на уровень вниз в рабочую зону (10) под контролем блока управления (5). Актуатор (9) установлен с возможностью тактовой подачи кассет к выгрузному отверстию распределителя (17). Обеспечивается повышение производительности, сокращение ручного труда, снижение простоев сеялки для перезагрузки блоков кассет с семенами. 2 ил.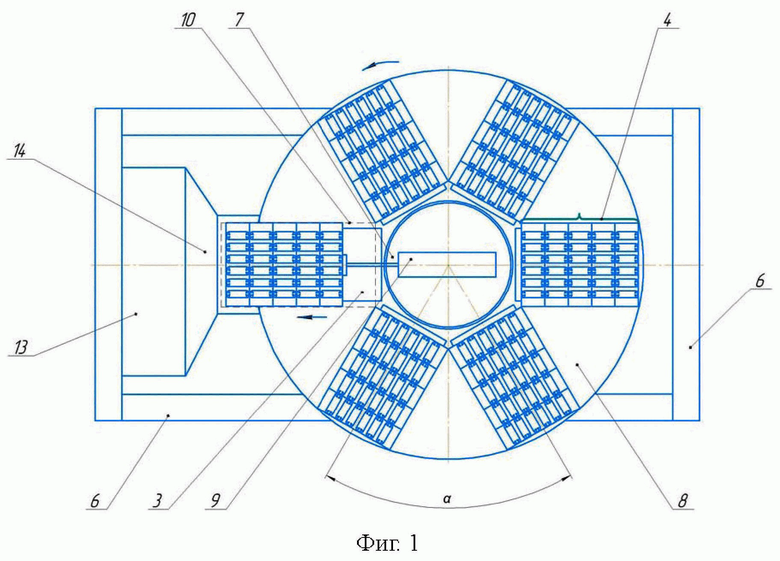
Робот для подачи семян карусельного типа селекционной сеялки, включающий блок управления, кассеты с ячейками, манипулятор с рамой, на которой размещены механизм для перемещения кассет и датчик положения кассет, платформы, одна из которых - центральная неподвижная с актуатором и толкателем, установленным на противоположной от высевающего аппарата стороне в зоне перемещения кассет с семенами, другая - внешняя подвижная с приводом от шагового электродвигателя, отличающийся тем, что он снабжен датчиком вращения, размещенным на валу высевающего аппарата и связанным с блоком управления и актуатором, дополнительным актуатором, установленным на раме манипулятора для поочерёдного вертикального перемещения внешней подвижной многоуровневой платформы с блоками кассет на уровень вниз в рабочую зону под контролем блока управления, при этом актуатор установлен с возможностью тактовой подачи кассет к выгрузному отверстию распределителя.
| Роботизированное кассетное загрузочное устройство карусельного типа селекционной сеялки | 2023 |
|
RU2806909C1 |
| Роботизированное кассетное загрузочное устройство селекционной сеялки | 2023 |
|
RU2807037C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| CN 107926222 A, 20.04.2018. | |||

