Изобретение относится к области скважинных устройств, которые используются для проведения гидроразрыва пласта (ГРП), а именно к устройствам для изоляции части пласта и активирования муфт ГРП (дротики, шары).
Во время проведения ГРП операторы проводят избирательную обработку для интенсификации притока в определенных интервалах или зонах скважины. В основном для этого используется сброс устройств определенной конструкции (дротиков или шаров) в колонну насосно-компрессорных труб. Каждое устройство открывает соответствующую втулку для точного проведения гидроразрыва пласта в каждой зоне скважины.
Обычно, сброшенные устройства входят в контакт с седлами соответствующего диаметра во втулках муфт гидроразрыва и создают барьеры с находящимися ниже зонами. Приложенный перепад давления в насосно-компрессорной трубе затем сдвигает втулку в открытое положение так, что текучая среда обработки может обрабатывать примыкающую зону для интенсификации притока.
Подобные устройства могут быть разбуриваемые или растворимые. Это необходимо для того, чтобы исключить стадию их извлечения на поверхность и обеспечить дальнейшую обработку других зон скважины.
Важным является такая характеристика устройств как обеспечение установки в определенную муфту гидроразрыва для обработки конкретной зоны. Для этого, например, используются шары различного диаметра, соответствующие определенной стадии муфты.
Известны система и способ многоступенчатой стимуляции скважин (патент RU 2759114, опубл. 09.11.2021 г., МПК: E21B 34/14). При этом дротик системы выполнен с возможностью введения в хвостовик и регулирования для его прохождения через один или более клапанов для гидроразрыва без открытия указанного одного или более клапанов для гидроразрыва, а также для взаимодействия с одним или более другими клапанами для гидроразрыва и открытия одного или более других клапанов для гидроразрыва.
Дротик содержит механизм регулировки, выполненный с возможностью регулировки одного или более первых положений для возможности прохождения дротика через один или более клапанов для гидроразрыва без их открытия во второе положение, в котором дротик взаимодействует с одним или более другими клапанами для гидроразрыва для открытия указанного одного или более других клапанов для гидроразрыва. При этом механизм регулировки дополнительно содержит: индексирующую втулку, установленную с возможностью перемещения на наружном диаметре мандрели дротика, для управления перемещением дротика из одного или более первых положений во второе положение; верхнюю цангу и нижнюю цангу, образованные на индексирующей втулке, причем указанные верхняя и нижняя цанги смещены вовнутрь в радиальном направлении по направлению к мандрели; последовательность круговых канавок, образованных на наружной поверхности мандрели дротика таким образом, что верхняя и нижняя цанги индексирующей втулки могут взаимодействовать с указанными круговыми канавками, когда индексирующая втулка перемещается в осевом направлении относительно мандрели, в результате чего-либо верхняя цанга отводится в радиальном направлении в канавку или выдвигается в радиальном направлении между указанными канавками либо нижняя цанга отводится в радиальном направлении в канавку или выдвигается в радиальном направлении между указанными канавками; удерживающую поверхность, образованную на конце мандрели, расположенном выше по стволу скважины, которая обеспечивает выдвигание в радиальном направлении указанной верхней цанги, когда индексирующая втулка находится во втором положении; и буртик мандрели, образованный на конце мандрели, расположенном выше по стволу скважины, для остановки осевого перемещения индексирующей втулки во втором положении. Способ включает закачивание дротика в хвостовик, прохождение указанного дротика через один или более клапанов для гидроразрыва без их открытия и взаимодействие указанного дротика внутри одного или более других клапанов для гидроразрыва и открытие одного или более других клапанов для гидроразрыва, причем все указанные один или более клапанов для гидроразрыва, имеющие непроходной буртик, образованный на седле, выполнены с возможностью открытия с помощью указанного дротика.
Однако, конструкция известного дротика многокомпонентная, а также требует создания определенной конструкции каждого элемента системы, что усложняет в целом технологию проведения многоступенчатого гидроразрыва пласта.
Известно активирующее устройство (дротик) для скважинного инструмента (заявка GB 2598081, опубл. 23.02.2022, МПК: E21B 23/04, E21B 34/14), сконфигурированное для перемещения вниз по потоку через насосно-компрессорную трубу к скважинному инструменту и активации скважинного инструмента, активирующее устройство, содержащее: посадочную часть, выполненный с возможностью посадки в гнездо скважинного инструмента; и складная часть, способная складываться из расширенной конфигурации в сложенную конфигурацию, при этом в развернутой конфигурации складная часть проходит радиально наружу за пределы посадочной части. При этом складная часть отделяется от корпуса устройства за счет упругой или пластической деформации соединительного элемента.
Общим признаком известного и заявляемого устройства является расширяющаяся часть устройства (фиксаторы) для закрепления дротика в муфте.
Однако, известное устройство не позволяет определять муфту, в которой необходимо остановиться дротику для последующей обработки соответствующей зоны пласта, а также основной механизм активации устройства связан с давлением, которое оказывается на устройство (при его упругой или пластической деформации соединительного элемента устройства), что может приводить к некорректной работе устройства.
Известен скважинный инструмент для использования в колонне скважинных труб (патент US 9719327, опубл. 01.08.2017 г., МПК: E21B 34/14, E21B 23/00), который содержит корпус, имеющий сквозное отверстие, образующее часть пути потока жидкости через колонну скважинных труб, скользящий элемент, выполненный с возможностью скольжения относительно корпуса, множество магнитных штифтов и соответствующие множество пружин. Линия скольжения образована сопрягающимися поверхностями скользящего элемента и корпуса, и множество штифтов находятся в заблокированном положении и в разблокированном положении, при этом в заблокированном положении по меньшей мере один штифт охватывает линию скольжения для предотвращения скольжения скользящего элемента с относительно корпуса и в разблокированном положении штифты не пересекают линию скольжения. Множество пружин смещает штифты в положение блокировки. При этом множество магнитов расположены и ориентированы относительно корпуса с образованием магнитного рисунка. Множество магнитов в первом магнитном узоре используется для перемещения множества магнитных штифтов внутри первого скважинного инструмента в разблокированный узор, и при этом множество магнитов во втором магнитном узоре используются для перемещения множества магнитных штифтов внутри второго скважинного инструмента в незамкнутый рисунок, при этом первый магнитный рисунок отличается от второго магнитного рисунка.
Общими признаками является использование магнитов для управления скважинного инструмента и обеспечения возможности обработки зоны скважины.
Однако в известном решении предлагается использовать магнитные узоры, которые должны отличаться для каждого штифта, что будет усложнять конструкцию всей скважинной системы, а также может приводить к ошибке при кодировании магнитных рисунков для работы устройства.
Ближайшим аналогом (прототипом) является механизм для активирования множества скважинных устройств (патент RU 2524219, опубл. 27.07.2014 г., МПК: E21B 34/06, E21B 34/10, E21B 43/12). Механизм для избирательного активирования множества путей прохода в забойной зоне ствола скважины содержит клапан, имеющий втулку, приспособленную для перемещения между открытым и нормально закрытым положением, и группу магнитов клапана и дротик для подачи насосом в ствол скважины. Группа магнитов установлена также на втулке муфты. Дротик включает в себя группу магнитов, согласованных с группой магнитов клапана так, что дротик соединяется с клапаном при расположении вблизи него, и втулка перемещается из закрытого положения в открытое положение.
Общими признаками является использование магнитов для закрепления дротика в муфте ГРП определенной стадии.
Однако известный механизм требует сложную систему магнитов как на дротике, так и на клапане втулки самой муфты, т.е. при необходимости активирования конкретной муфты требуется создать согласованную группу магнитов на дротике. Это усложняет как конструкцию самого дротика, так и муфт.
Технической задачей изобретения является создание устройства для перекрытия потока пластового флюида путем установки устройства в определенную муфту ГРП, которое будет обеспечивать активацию определенных, выбираемых оператором зон скважины для проведения операций ГРП, при этом будет конструктивно простым и эффективным и не требующим внесения значительных конструктивных изменений во все элементы скважинной системы.
Техническим результатом является снижение энергетических затрат для обеспечения рабочего цикла торможения и посадки в муфту ГРП устройства, одновременно с упрощением конструкции устройства (дротика) и с сохранением высокой надежности устройства, а также возможность определения и установки устройства в той зоне скважины, в которой необходимо произвести обработку, обеспечение точной фиксации устройства в конкретной зоне скважины для обработки пласта и отсутствие необходимости значительной модификации конструкции остальных элементов скважинной системы.
Технический результат обеспечивается за счет использования скважинного устройства для проведения операций ГРП, включающего корпус, в котором установлены по меньшей мере клапан шариковый и уплотнительный элемент, выполненные с возможностью перекрывания потока пластового флюида, упоры, выполненные с возможностью выдвижения из корпуса и соединенные с толкателем, при этом толкатель соединен с магнитной полумуфтой, которая выполнена с возможностью линейного возвратно-поступательного движения, магнитная поворотная полумуфта, установленная соосно магнитной полумуфте, соединенной с толкателем, электропривод линейный, соединенный со штоком, выполненным с возможностью фиксации положения магнитной поворотной полумуфты, и электронный блок управления, включающий датчик измерения магнитного поля, выполненный с возможностью подачи управляющего сигнала на электропривод линейный, и блок питания, при этом обе магнитные полумуфты имеют рабочие поверхности с одинаковым числом пар разноименных магнитных полюсов, расположенных друг напротив друга.
Достижение технического результата обеспечивается за счет сочетания элементов устройства. Датчик прохождения муфты ГРП (датчик измерения магнитного поля) позволяет определить количество магнитных полей втулок (муфт ГРП), которые проходит устройство при движении по скважине, при этом перед спуском устройства в скважину в электронном блоке управления программируется порядковый номер муфты, в которой необходимо расположить данное устройство. При достижении нужной муфты из электронного блока управления подается управляющий сигнал на линейный электропривод, который в свою очередь убирает (втягивает) шток, удерживающий поворотную магнитную полумуфту. Поворотная магнитная полумуфта осуществляет поворот, при котором разноименные полюса магнитов полумуфты поворотной и полумуфты толкателя располагаются друг напротив друга. Происходит притяжение магнитов полумуфты толкателя к магнитам полумуфты поворотной. Толкатель в результате поступательного движения полумуфты толкателя воздействует на упоры и выдвигает их за пределы корпуса, что приводит к процессу торможения устройства в скважине и расположения устройства в порт ГРП, номер которого был введен. Клапан шариковый и уплотнительный элемент, размещенные в конструкции устройства обеспечивают перекрывание потока пластового флюида и изоляцию части пласта.
Шток позволяет фиксировать магнитную поворотную полумуфту на определенном расстоянии от магнитной полумуфты, соединенной с толкателем. Расстояние может фиксироваться при изготовлении устройства. Либо устройство может быть выполнено с возможностью изменения расстояния между магнитными полумуфтами путем поворота штока на разные значения угла поворота. При конструировании устройства расстояние может определяться путем моделирования и расчета эпюр, которые позволяют определить силу, с которой магнитные полумуфты будут соединяться друг с другом. Моделирование может включать данные о типе используемых магнитов, их геометрических характеристиках, взаимном расположение (используемая форма магнитных полумуфт, например, плоские или конусообразные) и другие данные, что является известным для специалиста и применяется в известных программных продуктах, которые позволяют осуществлять такое моделирование.
Угол поворота магнитной поворотной полумуфты предпочтительно составляет 90°, либо определяется в зависимости от количества секторов разноименных полюсов для обеспечения притяжения магнитных полумуфт системы друг к другу. Угол поворота магнитной поворотной полумуфты учитывается при конструировании устройства. Удержание полумуфты от поворота обеспечивается за счет использования штока, который выполнен с возможностью удержания магнитной поворотной полумуфты от поворота до подачи сигнала из блока управления на электропривод линейный.
Вместо механического зацепления двух элементов устройства используется сила магнитного поля. Использование системы магнитов, расположенных внутри корпуса, обеспечивают с одной стороны упрощение конструкции устройства по сравнению с известными, с другой стороны обеспечивают её надежность.
Магнитные полумуфты могут быть любой формы. При этом конструкция магнитных полумуфт обеспечивает наличие на рабочей поверхности каждой полумуфты секторов с разноименными полюсами магнитов. Специалисту понятно, что при этом необходимо обеспечить покрытие (защиту) остальной части используемых магнитов магнитомягким материалом, который шунтирует магнитные поля на внешней поверхности полумуфт и исключает их влияние как на взаимодействие магнитных полумуфт, так и на остальные элементы устройства.
Предпочтительно, чтобы на каждой магнитной полумуфте было от 4 до 6 разноименных полюсов магнитов (т.е. чередующиеся сектора с южным и северным полюсами).
Магнитные полумуфты могут иметь круглую форму (выполнены в виде цилиндров). Либо одна из полумуфт может содержать шток, а вторая – выполнена с отверстием под шток. Магнитные полумуфты могут быть выполнены также в конусообразной форме с обеспечением соединения поверхностей конусов при притяжении магнитов. Такая форма позволяет увеличить эффективность действия магнитного поля при притяжении магнитов.
Для специалиста известно, что сила притяжения и отталкивания магнитов будет зависеть от типа используемых магнитов, а также от формы. Конусообразная форма магнитных полумуфт будет обеспечивать большее взаимодействие магнитных полюсов при увеличенном рабочем зазоре (т.е. отталкивание одноименных магнитных полюсов и, соответственно, притяжение разноименных магнитных полюсов).
Датчик измерения магнитного поля (датчик прохождения муфты ГРП) может представлять собой датчик Холла либо любой другой датчик, обеспечивающий измерение и фиксацию наличия магнитного поля.
Блок питания может представлять собой блок батарей, который включает две батарейки формата АА. Может использоваться другой формат батарей, либо может использоваться любой известный источник питания, который будет обеспечивать работу электропривода.
Линейный привод может представлять собой типовой втяжной электромагнит с ходом штока 5 мм и начальным усилием 15 Н, что дополнительно будет обеспечивать надежность работы устройства при использовании малогабаритного источника питания.
Элементы устройства, кроме магнитных полумуфт, могут быть выполнено из растворимого материала, например, сплавов на основе магния. Это обеспечит удаление части устройства из скважины после завершения операции ГРП. Такие материалы в настоящее время широко разрабатываются и используются. Также устройство может быть выполнено из любых известных растворимых материалов, которые могут быть использованы в данной области техники (алифатические сложные полиэфиры, полиуретан, термопластичный уретан, сплавы алюминия и другие).
Дополнительно устройство может включать центратор для исключения радиальных ударных нагрузок при движении дротика вдоль скважины.
Достижение технического результата достигается при реализации способа изоляции части пласта при проведении операций ГРП с использованием заявляемого устройства, который включает стадии: размещение в районе муфт ГРП магнитных меток, введение в блок управления устройства порядкового номера муфты для расположения устройства, подача устройства в скважину, фиксация датчиком измерения магнитного поля количества пройденных магнитных меток муфт ГРП при движении устройства по скважине, подача сигнала от блока управления устройства при прохождении магнитной метки, соответствующей введенному на первой стадии порядковому номеру, на электропривод линейный, который убирает шток, удерживающий поворотную магнитную полумуфту, соединение поворотной магнитной полумуфты и магнитной полумуфты, соединенной с толкателем, выдвижение упоров при движении толкателя, торможение устройства и размещение в муфте ГРП, номер которой введен в блок управления устройства на первой стадии, перекрывание потока пластового флюида клапаном шариковым устройства.
Технический результат достигается за счет использования устройства, которое позволяет определять муфту ГРП в той зоне скважины по магнитным меткам, обработку которой необходимо произвести, использование системы магнитных полумуфт устройства, которые приводят в действие упоры для торможения и для закрепления устройства в муфте, с одной стороны упрощает устройство и исключает необходимость значительных изменений других элементов скважинной системы, с другой стороны обеспечивает надежность устройства.
После закрепления устройства в муфте ГРП проводят операцию по интенсификации притока. После проведения операции по интенсификации притока устройство может быть растворено и магниты выведены из скважины. Возможность изготовления подобных устройств на основе сплавов магния, которые являются растворимыми – известны для специалистов.
На фиг. 1 представлена общая схема варианта реализации устройства, где 1 – клапан шариковый, 2 – уплотнительный элемент, 3 – упор, 4 – толкатель, 5 – корпус, 6 – полумуфта толкателя, 7 – полумуфта поворотная, 8 – магниты постоянные, 9 – шток, 10 – электропривод линейный, 11 – датчик измерения магнитного поля (датчик прохождения муфты ГРП), 12 – центратор, 13 – электронный блок управления, 14 – блок питания, 15 – отверстие для взвода поворотной полумуфты.
На фиг. 2 представлена схема поперечного среза магнитной полумуфты толкателя, где 16 – сектор постоянного магнита с южным полюсом (S), 17 – сектор постоянного магнита с северным полюсом (N).
На фиг. 3 представлена схема поперечного среза магнитной полумуфты поворотной, которая соединена с электронным блоком управления и выполнена с возможностью поворота, где 16 – сектор постоянного магнита с южным полюсом (S), 17 – сектор постоянного магнита с северным полюсом (N).
На фиг. 4 и 5 представлены эпюры, рассчитанные в программном комплексе Maxwell 16.0 для случая, когда обеспечивается зазор между полумуфтами 1 мм. На фиг. 4 представлен вариант, когда одноименные полюса находятся друг напротив друга, усилие отталкивания полумуфт составило 455 Н. На фиг. 5 представлен вариант, когда друг напротив друга находятся разноименные полюса магнитов, усилие притяжения полумуфт составило 782 Н.
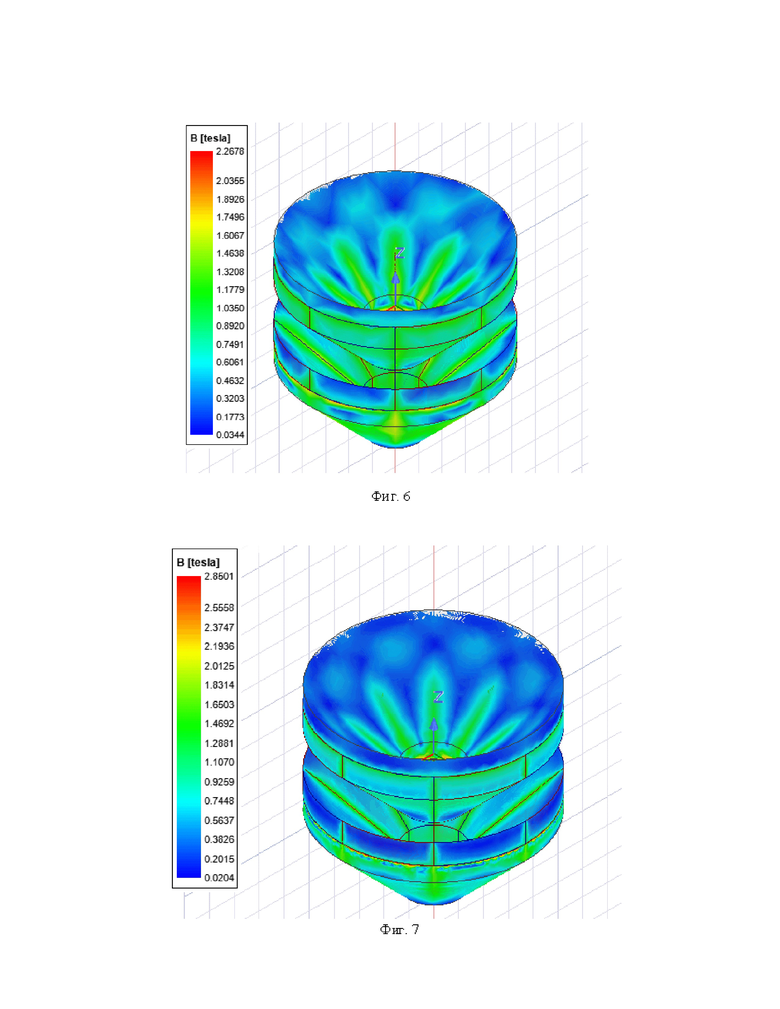
На фиг. 6 и 7 представлены эпюры, рассчитанные в программном комплексе Maxwell 16.0 для случая, когда обеспечивается зазор между полумуфтами 15 мм. На фиг. 6 представлен вариант, когда одноименные полюса находятся друг напротив друга, усилие отталкивания полумуфт составило 81 Н. На фиг. 7 представлен вариант, когда друг напротив друга находятся разноименные полюса магнитов, усилие притяжения полумуфт составило 84 Н.
Скважинное устройство для проведения операций ГРП, которое включает корпус (5), в котором установлены по меньшей мере клапан шариковый (1) и уплотнительный элемент (2), выполненные с возможностью перекрывания потока пластового флюида, по меньшей мере два упора (3), выполненных с возможностью выдвижения из корпуса (5) и соединенные с толкателем (4). При этом толкатель (4) соединен с магнитной полумуфтой (6), которая выполнена с возможностью линейного возвратно-поступательного движения. В корпусе также установлена магнитная поворотная полумуфта (7), установленная соосно магнитной полумуфте (6), соединенной с толкателем, и электропривод линейный (10), соединенный со штоком (9), выполненным с возможностью фиксации положения магнитной поворотной полумуфты (7), и электронный блок управления (13), включающий датчик измерения магнитного поля (11), выполненный с возможностью подачи управляющего сигнала на электропривод линейный (10), и блок питания (14), при этом обе магнитные полумуфты имеют рабочие поверхности с одинаковым числом пар разноименных магнитных полюсов, расположенных друг напротив друга.
Клапан шариковый (1) и уплотнительный элемент (2) предназначены для перекрывания потока пластовой жидкости после установки устройства в муфту ГРП. Упоры (3) в выдвинутом положении предназначены для осуществления торможения устройства перед установкой в муфту ГРП.
Толкатель (4) совместно с магнитной полумуфтой толкателя (6) предназначены для управления движением упоров. Полумуфта толкателя имеет возможность осуществления только линейного возвратно-поступательного движения.
Поворотная полумуфта (7) предназначена для управления возвратно поступательным движением полумуфты толкателя при изменении своего углового положения. Поворотная полумуфта и полумуфта толкателя содержат редкоземельные постоянные магниты (8). Обе полумуфты имеют магнитные системы с одинаковым числом пар полюсов. Для увеличения усилий при большом рабочем зазоре, магнитные системы предпочтительно имеют конусообразную форму.
Могут использоваться любые типы магнитов, предпочтительно использовать магниты на основе редкоземельных металлов (например, неодим-железо-бор). При высоких температурах в скважине наиболее предпочтительно использовать самарий-кобальтовые магниты, которые стабильны при температуре выше 200°С.
Электропривод линейный (10) с подпружиненным штоком (9) предназначены для фиксации положения поворотной полумуфты в точке неустойчивого положения и разблокировки при срабатывании после подачи напряжения на контакты линейного привода.
Датчики прохождения муфты ГРП (11) предназначены для считывания магнитных меток и последующей передачи информации в контроллер блока управления устройства. Для исключения пропусков магнитной метки в устройстве предпочтительно установлено 3 датчика под углом 120 град. Датчики выполнены на основе омниполярных элементов Холла, отличительной особенностью которых является фиксация наличия магнитной индукции выше порогового значения без учета полярности.
Центраторы (12) предназначены для исключения «рысканья» устройства при движении в скважине.
Электронный блок управления (13) содержит оперативно программируемый контроллер, модули датчиков Холла, повышающий преобразователь для зарядки емкостного накопителя до напряжения 16 В от блока батарей АА в течение 20-30 с.
Блок батарей (14) представляет собой отсек для установки двух элементов АА.
Отверстие для взвода магнитной поворотной полумуфты (15) предназначено для установки элемента оснастки, который обеспечивает установку штока в положение, при котором шток удерживает магнитную поворотную полумуфту на расстоянии от магниной полумуфты, соединенной с толкателем, при подготовке устройства к пуску в скважину.
Корпус (5) выполнен совместно с клапаном шариковым из специального магниевого сплава, разрушающего конструкцию устройства в скважине при воздействии пластовой жидкости.
Ниже представлен пример реализации изобретения, который иллюстрирует устройство (дротик) и способ его использования, но не ограничивает.
При изготовлении устройства и до его спуска в скважину может обеспечиваться состояние (предпочтительно), когда магнитные полумуфты соединены, чтобы не было случайного срабатывания, либо состояние, когда магнитные полумуфты (взведенное состояние). Это обеспечивается установкой штока в положении, в котором полумуфты разъединены (взведенное состояние).
Для использования устройства в конструкцию ГРП включают магнитные метки (маркеры), которые включают постоянные магниты и концентратор из магнитомягкого материала. Предпочтительно, чтобы магнитная метка была кольцевая. Магнитные метки известны из уровня техники. Магнитные метки оптимально располагать на расстоянии от 100 метров до 300 метров до муфты ГРП, но расстояние может быть больше или меньше в зависимости от конструкции скважины с ГРП. Одним из вариантов расположения магнитных меток может быть установка первой магнитной метки на определенном расстоянии до первой муфты ГРП, для второй, третьей и т.д. муфт ГРП магнитные метки могут быть установлены в районе портов ГРП, которые расположены ранее. Данные по расстоянию расположения магнитных меток вводятся в блок управления устройства для активации устройства. При этом скорость устройства может регулироваться любым известным способом.
Перед запуском устройства оператор программирует блок управления с указанием количество магнитных полей магнитных меток для каждой муфты ГРП и расстояния, которые должен пройти дротик при движении через скважину, а также обеспечивает, чтобы магнитные полумуфты устройства были разъединены и упоры находились внутри изделия (выполняют взвод исполнительного механизма). Это осуществляют следующим образом. С помощью оснастки в отверстие для взвода поворотной муфты производится установка стержня с рукояткой через щель в корпусе. При приложении усилия к рукоятке стержня происходит угловое перемещение поворотной полумуфты до совмещения подпружиненного штока (9) линейного привода с отверстием на торце магнитной поворотной полумуфты и фиксация ее положения относительно магнитной полумуфты, соединенной с толкателем, конструкция которой исключает угловые перемещения.
В зафиксированном положении постоянные магниты поворотной полумуфты занимают положение напротив постоянных магнитов полумуфты толкателя одинаковой полярности – N напротив N, S напротив S. Это вызывает взаимное отталкивание и перемещение полумуфты толкателя в сторону увеличения магнитного зазора до упора в корпус. Одновременно толкатель выходит из зацепления с упорами, которые смещаются внутрь корпуса и исключают торможение устройства при перемещении по скважине.
Кроме того, взаимное положение постоянных магнитов полумуфт в фиксированном положении штока обеспечивает минимальный момент силы, действующий на поворотную полумуфту, что исключает заклинивание штока и значительно снижает потери на трение при срабатывании линейного привода.
В батарейный отсек устройства устанавливаются два элемента АА, включается питание и вводится номер магнитной метки, после прохождения которой устройство должен начать торможение.
Устройство запускают в скважину.
При прохождении вдоль скважины датчики устройства (11) отслеживают наличие магнитных меток муфт ГРП.
После достижения магнитной метки с номером, установленным в электронном блоке управления при подготовке к пуску, на контакты линейного электропривода от блока питания подается напряжение. Линейный электропривод втягивает шток, выводя его из зацепления с магнитной поворотной полумуфтой.
Полюса постоянных магнитов магнитной полумуфты, соединенной с толкателем, расположены напротив одноименных полюсов магнитов поворотной полумуфты – север (N) напротив севера (N), юг (S) напротив юга (S), что соответствует точке неустойчивого равновесия (вершина потенциального барьера).
Магнитная поворотная полумуфта начинает вращательное движение для совмещения положения своих постоянных магнитов с постоянными магнитам противоположной полярности магнитной полумуфты, соединенной с толкателем, – N напротив S, что соответствует точке устойчивого равновесия (потенциальная яма). При достижении поворотной муфтой критического угла совмещения разнополярных полюсов постоянных магнитов, вектор силы полумуфты толкателя меняет знак на противоположный, что приводит к тяжению и последующему поступательному движению толкателя в сторону поворотной полумуфты.
Одновременно толкатель при поступательном движении воздействует на упоры и выдвигает их за пределы корпуса, что обеспечивает эффективное торможение устройства перед установкой в муфту ГРП. Время торможения определяется в зависимости от расстояния между магнитной меткой и муфтой ГРП, скорости движения устройства и силой торможения, которая определяется силой взаимодействия между магнитными полумуфтами. Скорость движения устройства и, соответственно, время торможения можно регулировать с устья изменяя компрессором давление в скважине.
На фиг. 4-6 представлены эпюры, на которых показаны магнитные поля при совмещении (при совмещении разноименных магнитных полюсов) и отталкивании (при отталкивании одноименных магнитных полюсов) магнитных полумуфт.
Когда происходит взвод устройства, обеспечивается удержание магнитной поворотной полумуфты штоком как описано выше и, соответственно, возникает сила отталкивания между одноименными магнитными полюсами).
При размере зазора между полумуфтами 1 мм (фиг. 4), усилие отталкивания будет составлять 455 Н, усилие притяжения – 782 Н, т.е. усилие торможения составляет 78 кг. Что обеспечивает эффективность посадки дротика в муфту ГРП.
При размере зазора между полумуфтами 15 мм (фиг. 6), усилие отталкивания составляет 81 Н, усилие притяжения – 84 Н, т.е. усилие торможения составляет порядка 8 кг.
Усилие воздействия на упоры более 700Н при питании устройства от серийных батарей АА (2шт.) подтверждено расчетами 3D-модели (фиг. 4 и 5) и натурными испытаниями макетного образца.
После размещения устройства в муфте ГРП клапан шариковый и уплотнительные элементы перекрывают поток пластового флюида и обеспечивают изоляцию указанной части пласта в указанном (путем указания номера муфты ГРП для размещения дротика) для проведения операции по интенсификации притока путем проведения ГРП.
После обработки зоны пласта дротик, элементы которого выполнены из сплава на основе магния, растворяются, а магниты выводят из скважины.
После срабатывания и дальнейшего разрушения устройства внутренние поверхности полумуфт соединяются друг с другом с усилием, например, более 700Н и остаются в этом положении. Это исключает взаимодействие магнитов внутренних поверхностей полумуфт со стальными элементами скважины.
Для увеличения индукции в рабочем зазоре постоянные магниты полумуфт установлены на основания из магнитомягкого материала, который шунтирует магнитные поля на внешней поверхности полумуфт и исключает их взаимодействие со стальными элементами скважины.
Торцевые поверхности магнитов полумуфт могут взаимодействовать со стальными элементами скважины. При этом следует учитывать следующее:
- индукция на торцевой поверхности магнитов на порядок ниже, чем на полюсе;
- диаметр полумуфт значительно меньше диаметра обсадной колонны скважины, что предполагает касание торцевой поверхности полумуфт со стальными элементами скважины только по одной линии, при этом ширина торцевой поверхности полумуфт (длина линии) не превышает 16 мм, т.е. площадью контакта минимальна;
- отсутствие в точках соприкосновения торцевой поверхности полумуфт со стальными элементами скважины знакоперемены магнитного поля, усиливающей взаимодействие при малых площадях контакта.
Таким образом, имеет место слабое взаимодействие торцевой поверхности полумуфт со стальными элементами скважины, которым можно пренебречь. Для извлечения магнитов из скважины может использоваться любой известный способ. В случае использования материалов, которые не обеспечивают растворение устройства, используют любые известные способы извлечения подобных устройств из скважины.
Приведенные данные подтверждают достижение технического результата, а именно снижение энергетических затрат для обеспечения рабочего цикла торможения и посадки в муфту ГРП устройства (на практике подтверждена возможность использования двух батарей типа АА) одновременно с упрощением конструкции устройства (дротика) и с сохранением высокой надежности устройства. Представленная конструкция устройства обеспечивает возможность определения и установки устройства в той зоне скважины, в которой необходимо произвести обработку, обеспечение точной фиксации устройства в конкретной зоне скважины для обработки пласта и при этом не требует значительной модификации конструкции остальных элементов скважинной системы – необходима только установка магнитных меток.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ АКТИВИРОВАНИЯ МНОЖЕСТВА СКВАЖИННЫХ УСТРОЙСТВ | 2011 |
|
RU2524219C1 |
| СИСТЕМА И СПОСОБ МНОГОСТУПЕНЧАТОЙ СТИМУЛЯЦИИ СКВАЖИН | 2019 |
|
RU2759114C1 |
| Комплект оборудования для многостадийного гидроразрыва пласта | 2022 |
|
RU2777032C1 |
| МНОГОЗОННОЕ ЗАКАНЧИВАНИЕ С ГИДРАВЛИЧЕСКИМ РАЗРЫВОМ ПЛАСТА | 2012 |
|
RU2601641C2 |
| МУФТА МАГНИТНАЯ ПРЕДОХРАНИТЕЛЬНАЯ | 2005 |
|
RU2288381C1 |
| ТОЛКАТЕЛЬ И СВЯЗАННЫЕ СПОСОБЫ ДЛЯ ЭКСПЛУАТАЦИИ СКВАЖИННЫХ КЛАПАНОВ | 2018 |
|
RU2745864C1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| ПРОТЕКТОР ФОНТАННОЙ АРМАТУРЫ | 2024 |
|
RU2823364C1 |
| Устройство для многостадийного гидравлического разрыва пласта | 2021 |
|
RU2791008C1 |
| КУЛАЧКОВАЯ МУФТА СВОБОДНОГО ХОДА | 1971 |
|
SU416966A3 |
Группа изобретений относится к нефтегазовой промышленности. Скважинное устройство для проведения операций гидроразрыва пласта (ГРП) включает корпус, клапан шариковый и уплотнительный элемент, упоры, выполненные с возможностью выдвижения из корпуса и соединенные с толкателем. Толкатель соединен с магнитной полумуфтой, которая выполнена с возможностью линейного возвратно-поступательного движения. Магнитная поворотная полумуфта установлена соосно магнитной полумуфте, соединенной с толкателем. Электропривод линейный соединен со штоком, выполненным с возможностью фиксации положения магнитной поворотной полумуфты. Электронный блок управления включает датчик измерения магнитного поля и выполнен с возможностью подачи управляющего сигнала на электропривод линейный. Магнитные полумуфты имеют рабочие поверхности с одинаковым числом пар разноименных магнитных полюсов, расположенных друг напротив друга и установленных на основании из магнитомягкого материала. Для осуществления способа изоляции части пласта при проведении операций ГРП заявленное устройство размещают в районе муфт ГРП магнитные метки. Вводят в блок управления устройства порядковый номер муфты для расположения устройства и подают устройство в скважину. Подают сигнал от блока управления устройства при прохождении магнитной метки, соответствующей введенному на первой стадии порядковому номеру, на электропривод линейный, убирающий шток, удерживающий поворотную магнитную полумуфту. Соединяют магнитные полумуфты. Выдвигают упоры при движении толкателя и осуществляют торможение устройства и размещение его в муфте ГРП, номер которой введен в блок управления устройства на первой стадии. Перекрывают поток пластового флюида шариковым клапаном. Достигается технический результат - повышение надежности устройства с возможностью определения и установки устройства в той зоне скважины, в которой необходимо произвести обработку, а также обеспечение точной фиксации устройства в конкретной зоне скважины для обработки пласта. 2 н. и 4 з.п. ф-лы, 7 ил.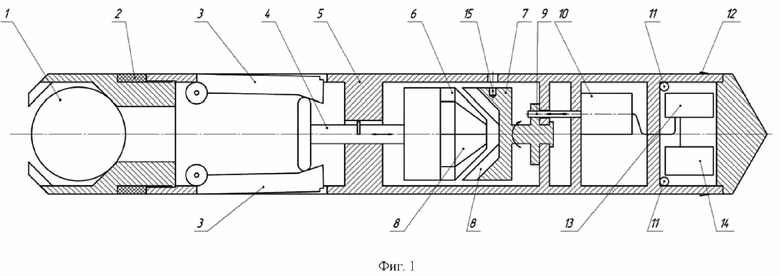
1. Скважинное устройство для проведения операций гидроразрыва пласта (ГРП), включающее корпус, в котором установлены клапан шариковый и уплотнительный элемент, выполненные с возможностью перекрывания потока пластового флюида, упоры, выполненные с возможностью выдвижения из корпуса и соединенные с толкателем, при этом толкатель соединен с магнитной полумуфтой, которая выполнена с возможностью линейного возвратно-поступательного движения, магнитная поворотная полумуфта, установленная соосно магнитной полумуфте, соединенной с толкателем, электропривод линейный, соединенный со штоком, выполненным с возможностью фиксации положения магнитной поворотной полумуфты, и электронный блок управления, включающий датчик измерения магнитного поля, выполненный с возможностью подачи управляющего сигнала на электропривод линейный, и блок питания, при этом обе магнитные полумуфты имеют рабочие поверхности с одинаковым числом пар разноименных магнитных полюсов, расположенных друг напротив друга и установленных на основании из магнитомягкого материала.
2. Скважинное устройство по п.1, в котором магнитные полумуфты выполнены конусообразной формы.
3. Скважинное устройство по п.1, в котором датчик измерения магнитного поля представляет собой датчик Холла.
4. Скважинное устройство по п.1, которое выполнено из растворимого материала.
5. Скважинное устройство по п.4, которое выполнено из сплава на основе магния.
6. Способ изоляции части пласта при проведении операций ГРП с использованием устройства по п.1, который включает стадии:
размещение в районе муфт ГРП магнитных меток,
введение в блок управления устройства порядкового номера муфты для расположения устройства,
подача устройства в скважину,
фиксация датчиком измерения магнитного поля количества пройденных магнитных меток муфт ГРП при движении устройства по скважине,
подача сигнала от блока управления устройства при прохождении магнитной метки, соответствующей введенному на первой стадии порядковому номеру, на электропривод линейный, который убирает шток, удерживающий поворотную магнитную полумуфту,
соединение поворотной магнитной полумуфты и магнитной полумуфты, соединенной с толкателем,
выдвижение упоров при движении толкателя,
торможение устройства и размещение в муфте ГРП, номер которой введен в блок управления устройства на первой стадии,
перекрывание потока пластового флюида клапаном шариковым устройства.
| МЕХАНИЗМ ДЛЯ АКТИВИРОВАНИЯ МНОЖЕСТВА СКВАЖИННЫХ УСТРОЙСТВ | 2011 |
|
RU2524219C1 |
| СИСТЕМА И СПОСОБ МНОГОСТУПЕНЧАТОЙ СТИМУЛЯЦИИ СКВАЖИН | 2019 |
|
RU2759114C1 |
| RU 227315 U1, 16.07.2024 | |||
| Магнитная муфта с магнитной системой и способ её сборки | 2024 |
|
RU2828919C1 |
| Копировальный аппарат | 1933 |
|
SU39574A1 |
| CN 202900039 U, 24.04.2013. | |||

