(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отбраковки магнитоуправляемых контактов | 1990 |
|
SU1781715A1 |
| Контактная система электромагнитного реле | 1983 |
|
SU1094080A1 |
| Способ испытания герконового реле | 1983 |
|
SU1136229A1 |
| Способ измерения силы контактного нажатия в герконах | 1972 |
|
SU440717A1 |
| Способ контроля импульсных реле с магнитной памятью на герконах | 1980 |
|
SU957312A1 |
| Способ контроля частоты резонанса замыкающих и резонансных магнитоуправляемых реле | 1982 |
|
SU1229856A1 |
| Способ управления резонансным реле | 1978 |
|
SU743066A1 |
| Устройство для защиты асинхронного двигателя от перегрузки | 1980 |
|
SU961027A1 |
| Способ подготовки геркона к контролю и устройство для его осуществления | 1988 |
|
SU1709407A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381008C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ МАГНИТОУПРАВЛЯНаЮГО КОН-: ТАКТА путем фО{ шрования гармоничес кого.управляющего воздействия заданной частоты , о т л и ч «I ю ц и и с я тем, что, с целью упрощения и ускорения измерений, увеличивгиот уровень управляющего воздействия до минимального значения, при происход: т периодические соприкосновения контаист-деталей испытуемого мйг1штоуправпяе юго контакта, измеряют перисщ высокочастотной составляющей {Колебаний рабочего магнитного потока и определяют резонансную частоту как величину, обратную измеренному периоду.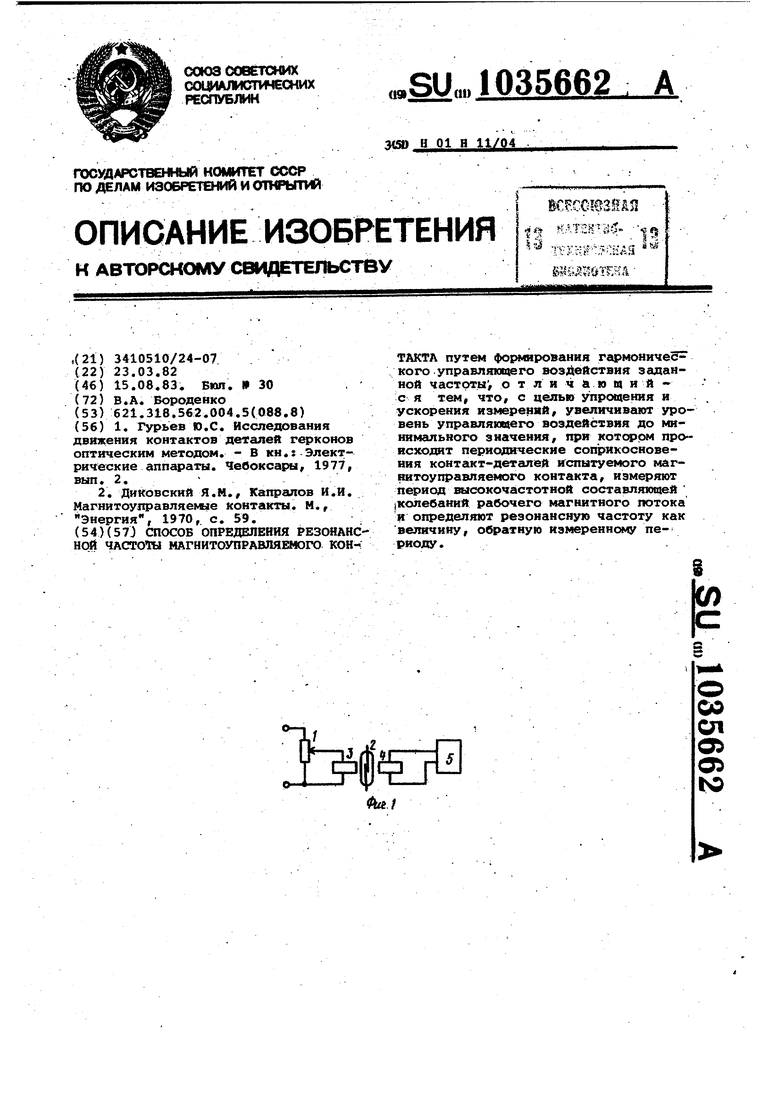
00
О1
а
О) tsd
Изобретение относится к электротехнике и может быть использовано для контроля герконов.
Известен способ определения резонансной частоты геркона путём визуального наблюдения размаха колеба- 5 подвижной контакт-детали при изменении управляющего сигнала в заданном диапазоне частот и амплитуд 1.. ,
Данный способ недоЬтаточно точен, ю сложен в реализации и требует большого количества измерений.
Наиболее близким к предлагаемому по технической сущности является способ определения резонансной час- 45 тоты магнитоуправляемого контакта путем формирования гармонического управляющего воздействия заданной частоты 2.
Недостатком этого способа является то, что он требует неоднократ- 20 ного подбела уровня управляющего сигнала: если он слишком мал, колебания контактов не фиксируются, если сЛишком велик,геркон будет срабатывать на многих частотах. Точность 5 способа существенно зависит от ста-бильности .уровня управляющего сигнала, обусловленной .стабильностью напряжения источника питания, изменением индуктивности управляющей катуш-30 ки при изменении частоты, мощностью генератора. Точность способа не обеспечивается, если не исключено взаимное влияние управляющей и измерительной катушек. .35
Цель изобретения - упрощение и ускорение измерений.
Поставленная цель достигается тем, что согласно способу определения резонансной частоты магнитоуправляемога.д контакта путем формирования гармонического управляющего воздействия заданной частоты, увеличивает уровень управляющего воздействия до минимального значения, при котором происходят периодические соприкосновения 45 контакт-деталей испытуемого магнитоуправляемого контакта, измеряют период высокочастотной составляющей колебаний рабочего магнитного потока и определяют резонансную частоту, как 50 величину, обратную измеренному периоду.
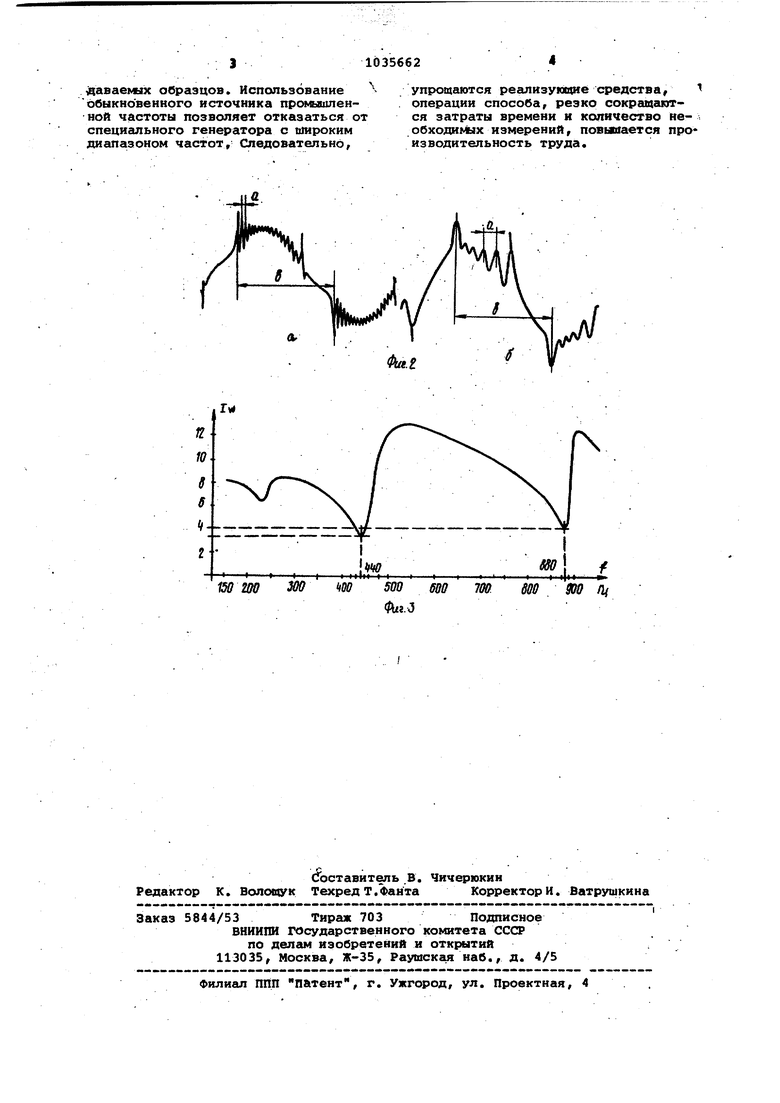
На фиг. 1 показана схема устройств: ва для реализации предложенного способа j на фиг. 2 - осциллограммы коле-55 баний рабочего магнитного потока иа, фиг. 3 - амплитудно-частотная характеристика веркона КЭМ-1,
Устройство для реализации апособа (фиг. 1) содерзкит источник питания 1 ул промышленной частоты 50 Гц, испытуе- мый геркон 2 с катушкой управления 3 и датчиком рабочего потока 4 в зоне контактного зазора, подключенным к электронно-лучевому осциллографу 5, например, типа С1-19Б.65
Согласно предложенному способу увеличивают уровень напряжения на катушке 3 до тех.пор, пока контактдетали геркона не начнут периодически соприкасаться. Фиксируют этот момент, например, акустически (по появлению дребезжания контактовf, визуально, (по искажению формы кривой потока, контролируемого датчиком 4, на экране осциллографа) или непосредственно по изменению показаний омметра, включенного в контактную цепь.Контролируют форму кривой рабочего потока в контак тном зазоре в данном режиме, например, по экрану осциллографа для геркона типа КЭН-2 (фиг. 2,а) и КЭМ-1 (фиг. 26). Измеряют непосредственно по экрану осциллографа для геркона КЭМ-1 значения а. 5,2 мм; . Определяют, что резонансная частота подвижной системл геркона равна .
Для сравнения на фиг. 3 приведена амплитудно-частотная характеристика того же экземпляра теркона КЭМ-1, полученная традиционным путем по результатам измерения параметра срабатывания на 21 частоте. Если по предложенному способу необходимо получить частоту резонанса в с , то полученный результат умножается на коэффициент k 2, который учитывает удвоенные частоты колебаний контакта при биполярном сигнале. Способ основан на том, что при минимальном уровне управляющего воздействия, обеспечиваквдем кратковременное соударение контактных пластин вблизи вершины полуволны сигнала, последующие затухающие колебания контактов с частотой резонанса производят локсшьную модуляцию « зоне контактного зазора кривой рабочего потока на ниспадакйцей части полуволны.
Предложенный способ обеспечивает опре еление частоты резонанса подвижной систе1«л геркона на основании единственного опыта, по точно изме.ряемым параметрам. Для конкретного примера расхождение полученного результата с данными традиционного метода 6,4% (фиг. 3) и вполне удовлетворительно. В то же время по традиционному способу производится на 20 опытов больше, причем в областях частот 440 и 880 Гц требуются еще более тщательные измерения в связи с близостью результатов между собой. Предложенный способ не требует, в отличие от известного, стабилизации управлянщего воздействия, и защиты от рабочего потока, предварительного знания предполагаемой об ласти резонансной частота, что особенно ценно для испытания вновь созн
Даваемых образцов. Использование обыкновенного источника промышленной частоты позволяет отказаться от специального генератора с широким диапа.зоном частот. Следовательно,
упрощаются реализу1с1пр1е средства операции способа, резко сокрацгиэтся затраты времени и количество необходи1 х измерений, повышается про изводительность труда.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гурьев Ю.С | |||
| Исследования движения контактов деталей герконов оптическим методом | |||
| - В кн.:-Электрические аппараты | |||
| Чебоксары, 1977, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Диковский Я.М., Капралов И.И | |||
| Магнитоутфавляекые контакты | |||
| М., Энергия, 1970, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
