Лзобретение относится к весоизмерительной технике, з частности к электрическим схемам, специально предназначенным для тензометрических аесрв.
Известен цифровой следящий автоком-5 пенсатор для измерения импульсных напряжений с фильтрацией помех на выходе тензометрического моста, содержащий генератор импульсного питания, делитель на сопротивлениях параллель-10 ного типа, коммутируемый бесконтакт- ными ключами, и управляющий реверсивный триггерный резистор, схему.сравнения, триггер знака, генератор так.товых импульсов, вентили и многофаэ- 15 ный мультивибратор (1.
Указанный аятокомпенсатор позволяет получить высокую точность измерения сигнгшов, не иэменякщих своего среднего значения в течение цикла из-2о мерения. При измерении медленно измеияпдихся сигналов возникает методическ&я погрешность иэмервиил, обусловленная тем, что в течение положительного полупермода помехи компенси-25 рукяиий сигнал опережает рост измеряемого сигнала со скоростью, равной разности их-скоростей мэменения,, а я течение отрицательного полупериода помехи компенсируинмй сигнгш отстает от роста измеряемого сигнала со скоростью, равной сум4е их скоростей изменеиня (в обогсх случаях взяты абсолютные значения скоростей). Указанная разница в поведении ко ш«нс1|руюиего сигнала в течение соседних полу-35 периодов помехи приводит к отставанию компенснруицего сигнала, т.е. к росту метоАической погрешности измерения.
Наиболее блшким по -технической сущности к предлагаемому является 40 автокомпенсат ч для тензс «етрич«ских весов, содержамий фазочувствительный нуль-орган, к входам которого подключены выхояы тензодатчика, генератора м линейного декодирующего преобразо- 45 вателя, входы которого подключе(П:2 к выходам реверсивного счетчика, узел выбора быстродействия и переключатель быстродействия с делителем частоты, вход которого подключен к генерато- -Q ру, и с первой группой схем И, перэые входы KOTOpiJX соединены с выходами узла выбора быстродействия, третьи входы - с выход Ц4и делителя частоты, а выходы - с вьясодамц первой ИЛИ 12.55
Известный автокомпенсатор не обеспечивает необходимую точность измерения медленно изменяющихся сигналов с нгичоженными высокочастотньали комехамн, поскольку в нем абсолютное чение скорости изменения компенсирующего сигнала на выходе линейного декодирующего преобразователя остается неизменным в течение положительного отрицательного полупериодов поме- 65
хи. Это приводит к резкому несоответствию характеров изменения измеряемого и компенсирующего сигналов в течение соседних полупёриодов помехи. Указанное несоответствие обусловлено тем, что при совпадении знаков скоростей изменения полезного сигнала и помехи скорость изменения суммарного сигнала равна скоростей изменения его составляющих, а при противополочЕНых знаках скорое-: тей изменения полезного сигнала и помехи скорость изменения суммарного сигнала равна разности скоростей изменения его ссставлякяаих. При это скорость изменения кс шенсирующего сигнала в течение соседних полупериодов помехи остается постоянной по абсолютной величине и противополож.ной по знаку, что неизбежно приводит к отставанию среднего значения компенсирующего сигнала от среднего значения измеряемого сигнала.
Цель изобретения - повышение точности измерения путем исключения погрешности, обусловленной отставанием среднего значения компенсирующего сигнала от среднего значения измеряемого сигнала.
Поставленная цель достигается тем что в автоксм1шенсаторе для тензометрических весов, содержащем фазочувствительный нуль-орган, к которого подключены выходы тензодатчика, генератора и линейного декодирусйцего преобразователя, входы которого подключены к выходам реверсивного счетчика, узел выбора быстродействия и переключатель быстродействия с делителем частоты, вход которого подктао чен к генератору, к с первой группой схем И, первые входы которых соединены с выходами узла выбора быстродействия, третьи входы - с выходами делителя частоты, а выходы г с выходами первой схемы ШШ, в переключатель быстродействия введены вторая группа сх«4 И и вторая схема ИЛИ, причем выходы первой схемы ИЛИ соединены с
Сложение
а выходы схем
входом
И второй группы через вторую схему ИЛИ - с входом Вычитание .реверсивного счетчика, первые входов схем И второй группы соединены с выходами узла выбора быстродействия, вторые входы схем И первой группы подключены к выходу Сложение ,, а вторые входы схем И второй группы - к выхоВычитание
фазочувств итель ного
нуль-органа, а третьи входы схем И второй группы соединены с выходами делителя чаатоты.
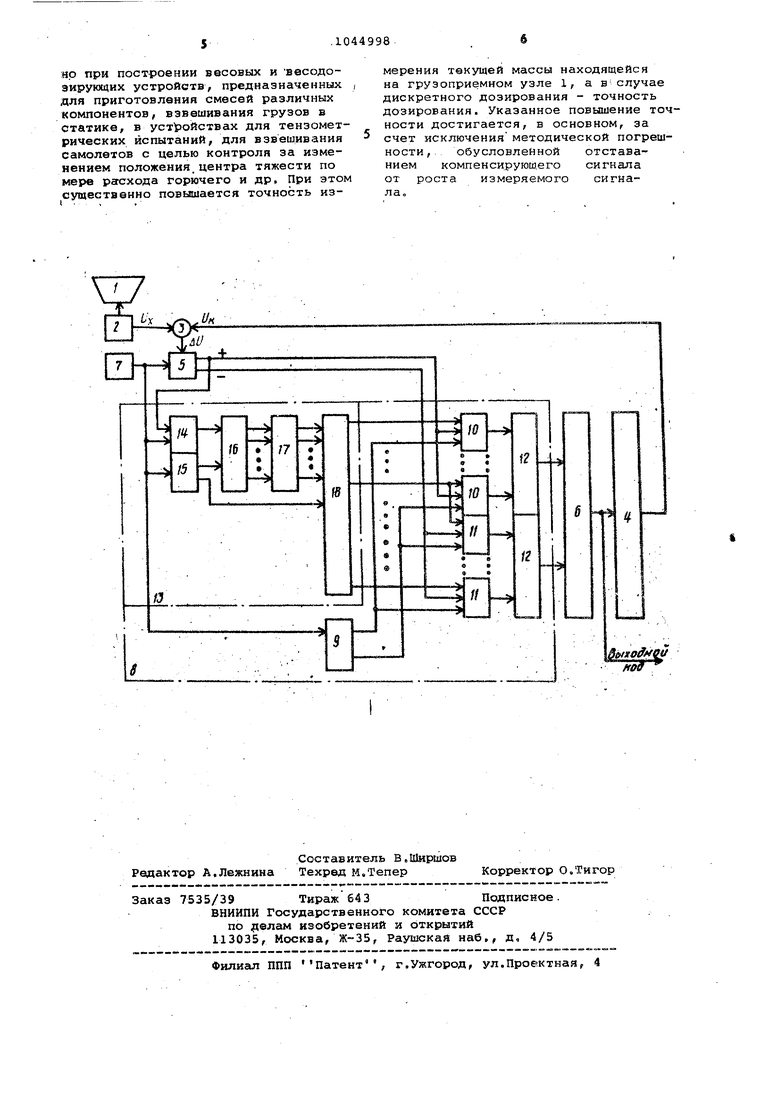
На чертеже -представлена функциональная схема предлагаемого устройства.
Устройство содержит грузоприемный; узел I, опирающийся на тензодатчики ; 2, выходной сигнал которых поступает во входную цепь 3 следящего авто компенсатора, содержащего линейный декодирующий преобразователь 4 нул орган 5, реверсивный счетчик 6 и ге нератор 7, Тактовые импульсы с выхо да генератора 7 поступают на вход переключателя 8 быстродействия, со.держащего делителя 9 частоты,первую и вторую 11 группы логических схем И и две логические схемы ИЛИ 12.Управлени логическиг-ш схемами И 10 и 11 осуще ствлявт узел 13 выбора быстродейств содержащий логическую схему И 14, счетчики 15 и 16, дешифратор i7 и регистр 18. Устройство работает следующим об разом. Изменение массы материала, наход щегося на грузоприемном узле 1, пре образуется тензодатчиками 2 в пропо .циональный аналоговый электрический сигнал Uj, который алгебраически су мируется во входной цепи 3 с выходным (компенсирующим) сигналом Ик ли нейного декодирующего преобразовате ля 4. Полученная разность Д. U двух сигналов поступает на вход нуль-орг на 5 , .который управляет шинами ревер са реверсивного счетчика 6, связанного с линейным декодируквцим преобразователем 4 таким образом, что ука занная разность сигналов стремится к нулю. При этом на выходе реверсивного счетчика формируется код, соответ ств5/ищий измеряемому сигналу. Заполнение реверсивного счетчика б осуществляется импульсги11и генератора 7 частоха которых с целью адаптивного ограничения быстродействия измерительного устройства в зависимости от скорости изменения измеряемого сигнала уменьшается при помощи делителя 9 частоты. Кратность ограничения быстродействия в соседних полупериодах помехи определяется выбором соответствующей схемы И 10 или 11, подающей импульсы заполнения на вход реверсивного счетчика 6 через логические схемы ИЛИ 11 или 12 таким образом, что при увеличении среднего значения измеряемого сигнала оказывается открытой одна из схем И 10, а при уменьшении среднего значения измеряемого сигнала открьшается одна из cxei И 11. Следовательно, при увеличении среднего значения измеряемого сигнала на вход реверсивного счетчика 6 через логическую схему ИЛИ 12 поступают только импульсы сложения, а при уменьшении среднего значения измеряемого сигнала - только импульсы вычитания. В случае неизменного среднего значения йзмеряемого сигнала на вход реверсивного счетчика б поступают импульсы сложен ния и вычитания через схемы И 10 и 11, подключенные к среднему разряду регистра 18 узла 13 выбора быстродействия. При этом количество импульсов сложения или вычитания, поступакхцих на вход реверсивного счетчика б за один полупериод помехи автоматически выбирается пропорциональным увеличению измеряемого сигнала за целый период помехи, т.е. сумма скоростей изменения компенсирующего сигнала в .течение одного периода помехи выбирается равной удвоенному среднему значению скорости изменения измеряемого сигнала. Такая-организация процесса измерения.позволяет исключить методическую погрешность метода следящего уравновешивания, поскольку в данном случае скорость изменения компенсируюшего сигнала максимальна при совпадении знаков скоростей, измеряемого Сигнала и помехи и минимальна при противоположных знаках скоростей изменения измеряемого сигнала и помехи. Автоматические определения среднего значения скорости изменения измеряемого сигнала и, соответственно, выбор быстродействия измерительного устройства осуществляются узлом 13 выбора быстродействия следующим o6paiзом. В течение некоторого интервала времени, определяемого временем заполнения счетчика 15, через схему И 14 на вход счетчика 16 поступают . импульсы заполнения, количество которых пропорционально скорости загрузки весового бункера (на чертеже не показан). Образующаяся при этом на выходах счетчика 16 кодовая комбинация поступает на вход дешифратора 17, который лреобразует эту кодовую комбинацию в ряд выходных сигналов, каждый из которых соответствует некоторой ср едней скорости изменения измеряемого, сигнала за указанный интервал времени. Причем дешифратор 17 устроен таким образом, что максимальные скорости возрастания или уменьшения измеряемого сигнала определяются соответственно одним старшим или одним младшим разрядом, а нулевая скорость - его средним разрядом. Полученная на выходе дешифратора кодовая комбинация после переполнения счетчика 15 переписывается в регистр 18, который выбирает одну из схем И 10 или 11,а в случаенулевой скорости изменения измеряемого сигнала две средние схемы И 10 и 11. Одновременно импульсом переполнения счетчика 15 сбрасывается в нуль счетчик 16 и процесс определения среднего значения скорости изменения измеряемого сигнала начинается сначала. Предлагаемый автокомпенсатор может найти широкое применение в различных информационно-измерительных комплексах для контроля и измерения монотонно изменяющихся сигналов. В частности, оно может быть использова- Яр при построении весовых и весодоэирукхцих устройств, предназначенных для приготовления смесей различных компонентов, взвешивания грузов в статике, в устройствах для тензометрических испытаний, для взвешивания самолетов с целью контроля за изменением положения, центра тяжести по мере рсгсхода горючего и др. При этом существенно повышается точность измерения текущей массы находящейся на грузоприемном узле 1, а вслучае дискретного дозирования - точность дозирования. Указанное повышение точности достигается, в основном, за счет исключения методической погрешности , обусловленной отставанием компенсируюш.его сигнала от роста измеряемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| Бесконтактное тензометрическое устройство для динамических измерений | 1984 |
|
SU1186939A2 |
| ЦИФРОВОЙ ФИЛЬТР | 2008 |
|
RU2383990C2 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| Цифровой измеритель тензометрических весов | 1983 |
|
SU1164558A1 |
| Многодиапазонное цифровое измерительное устройство для тензометрических весов | 1982 |
|
SU1044999A1 |
| ТЕНЗОМЕТРИЧЕСКОЕ ЦИФРОВОЕ УСТРОЙСТВО | 1993 |
|
RU2047849C1 |
| Цифровое устройство для тензометрических весов | 1980 |
|
SU911164A1 |
| Цифровой прибор для тензометрических весов | 1980 |
|
SU922523A1 |
АВТОКОМПЕНСАТОР ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ, содержащий фаэо чувствительный нуль-орган, к входам которого подключены выходы тензодатчика, генератора и линейного декодирунядего преобразователя, входы которого подключены к выходам реверсивного счетчика, узел выбора быстродействия и переключатель быстродействия с делителем частоты, вход кото рого подключен к генератору, и с первой группой схем И, первые входы которых соединены с выходами узла выбора быстродействия, третьи входы с выходами делителя частоты, а выходы с входами первой схемы ИЛИ, о тл и чающий с я тем, что, с целью повышения точности измерения путем исключения погрешности, обусловленной отставанием среднего значения компенсирующего сигнала от среднего значения измеряемого сигнала, в переключатель быстродействия введены вторая группа схем И и вторая схема ИЛИ, причем выходы первой схемы ИЛИ t t g Сложение соединены с входом выходы схем И второй группы через Вычитавторую схему ИЛИ - с входом ние реверсивного счетчика, первые входы схем И второй группы соединены (Я с выходами узла выбора быстродействия, вторые входьа схем И первой группы подключены к выходу Сложение , а вторые входы схем И второй группы к выходу Вычитание фазочувстви- 2 тельного нуль-органа, а третьи входы схем И второй группы соединены с выходами делителя частоты. hJ NU СО QO 00
Х
/
/J
в
//
Siftxo S ffoS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Весоизмерительное устройство | 1979 |
|
SU830136A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
