Изобретение относится к приборостроению и может быть использовано при настрой ке устройств для автоматического контроля и регулирования параметров технологичесрих процессов, например, давления, уров1ЦЯ, плотности, температуры и т.д. Известны способы настройки устройств для измерения давлений, включающие процесс сравнения измеряемой величины и выходного сигнала устройства, например, путем градуировки последнего 1J. Недоетаток этих способов обусловлен сложностью эксплуатации устройств, имеющих индивидуальную градуировку, например, в системах автоматического регулирования. Наиболее близким по технической сущности к изобретению является способ настройки пневмосилового преобразователя, содержащего рычажный элемент сравнения . с регулируемой опорой и сильфоном в линии отрицательной обратной связи, включающий коррекцию нуля и настройку верхнего предела измерения путем перемещения, опоры вдоль рычага 2. Недостатком этого способа является отсутствие ярнемов, обеспечивающих линеаризацию выходной статической характернстики настраиваемого средства измерения. Целью изобретения является повышение точности измерения преобразователя путем линеаризации его выходной статической характеристики. Поставленная цель достигаеч;ся тем, что согласно способу настройки пневмосилово, го преобразователя, содержащему рычажньгй элемент сравнения с регулируемой опорой и пневмосиловой элемент компенсации в виде сильфона в линии отрицательной обратной Связи, включающий коррекцию нуля и настройку верхне.го предела измерения путем перемещения опоры вдоль рычага, дополнительно, с помощью дроссельного сумматора, включенного в линию отрицательной обратной связи, путем изменения проводимости его пневмосопротивле: НИИ, а также смещения опоры, и повторной коррекции нуля устанавливают начало и конец диапазона измерения преобразователя и снимают его статическую характеристику, а затем указанный процесс повторяют до получения нелинейности выходной статической xapaKTepnctHKH, не превыщающей заданную. На чертеже представлена схема пневмосилового преобразователя, используемого например, в измерителе уровня, в котором реализуется предлагаемый способ. Пневмосиловой преобразователь состоит из рычажной системы 1, регулируемой опоры 2, сильфона обратной связи 3 и чувствительного элемента 4. Кроме того, на рычаге установленкорректор нуля 5 и индикатор рассогласования 6 типа «соплозаслонка. На выходе преобразователя установлен пиевмоусилитель 7, а в линии обратной связи дроссельный сумматор 8, состоящий иа регулируемых пневмосопротивлений 9 и 10; выход которого подключен к пйлости сильфона обратной связи, один из входов - к выходу пневмоусилителя, а второй вход соединен с атмосферой. Способ настройки пневмосилового преобразователя осуществляют следующим образом. Устанавливают проводимость пневмосопротивления 9 на больше минимального значения, а пневмосопротивления 10 на 5-10 % меньще максимального. С помощью корректора нуля 5, при нулевом значении входного сигнала преобразователя, воздействующего На чувствительный элемент 4, на вцходе его устанавлива ют давление, равное 0,02 МПа, т.е. Производят коррекцию нуля. Затем увеличивая значение входного сигнала определяют его величину, при которой на выходе преобразователя установится давление, равное 0,1 МПа, т.е. определяют его верхний пре: дел измерения., Настройку преобразователя на заданное значение верхнего предела измерения осуществляют вначале путем изменения передаточного отношения рычажного механизма, т.е. смещая опору 2 вдоль системы рычагов 1, и точно, изменением проводимости пневмосопротивлений 9 и 10. При этом после переустановки опоры 2 и изменений проводимости пневмосопротивлений 9 и 10 производят повторно коррекцию нуля, определяют верхний предел измерения преобразователя и настройку ведут до получения заданной точности начала и конца диапазона измерения преобразователя. Путем изменения входного сигнала, воздействующего на чувствительный элемент 4 и контроля выходного сигнала преобразователя снимают его статическую характеристику. Статическая характеристика пневмосилового преобразователя содержит случайную и систематнчес{ ую составляющие погрешности. Последняя обусловлена упругими деформациями .рычагов 1, элементов опоры 2, осейым изгибом сильфона 3, аэродинамикой индикатора рассогласования 6, упругими деформациями чувствительного элемента 4 и нелинейностью выходной характеристики пневмоусилителя 7. Эти погрешности могут быть охарактеризованы нелинейностью статической характеристики пневмосилового преобразователя. Кроме перечисленных элементов, источником нелинейности статической характеристики преобразователя может быть дроссельный сумматор 8. Эта нелинейность обусловлена нелинейностью расходных составляющих его П1гевмосопротивлений 9 и 10. .Однако, в зависимости от соотношения проводимостей пневмосопротивлений 9 и 10, т.е. в зависимости от настройки дроссельного сумматора 8, его выходная характеристика может быть установлена выпуклой вогнутой либо заданной кривизны и, следовательно нелинейность статической характеристики преобразователя в целом может быть откорректирована. Нелинейность .статической характеристики преобразователя корректируют следующим обрггзом. Смещают опору.2 вдоль рычагов I в лю-бую сторону, а затем повторно с помощью корректора нуля 5 и дроссельного сумматора 8 устанавливают точное значение начала и конца диапазона измерения преобразивателя и снимают его статическую характеристику При этом, если нелинейность статической характеристики уменьшилась, но не обеспечивается заданная точност1 преобразователя, то опору 2 следует сместить в ту же сторону, повторно пpoизpectи с помощью корректора нуля 5 и дроссельного сумматора 9 установку начала и конца диапазона измерения и снять статическую характеристику. При увеличении нелинейности статической характеристики преобразователя опору 2 смещают в противоположную предыдущему случаю сторону. Процесс линеаризации статической хара,ктеристики преобразователя ведут до получения нелинейности не превышающей за-. данную. В отличие от известного способа настройки пневмосилового преобразователя в описываемом техническом решении предусмат ривается дополнительная операция - совместная регулировка положения подвижной опоры рычажного элемента сравнения И: проводимостей . пневмосопротивлений дроссельного сумматора, включенного в линию отрицательной обратной связи, что обеспечивает возможность линеаризации его статическои характеристики и, тем самым, повышает точность преобразователя в целом, Кроме того, в отличие от известного способа, процесс настройки на заданное значение верхнего предела измерения по предлагаемому техническому решению менее трудоемок, так как требуется меньшая точность установки подвижной опоры рычажного элемента сравнения. Экспериментальная проверка данного технического решения показала, что при использовании его в известном устройстве, имеющем систематическую составляющую погрешности 1,5 %, была получена погрешность не превышающая 0,3 величина которой по существу была ограничена степенью точности имеющихся контрольноизмерительных приборов. Кроме того, время настройки известного пневмосилового преобразователя, составляющее 15-25 мин/ при использовании данного технического решения сократилось до 0,5-1,5 мин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь уровня | 1983 |
|
SU1129497A1 |
| ПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU435528A1 |
| Гидростатический уровнемер | 1979 |
|
SU800661A1 |
| Устройство для измерения температуры | 1978 |
|
SU726437A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Силоизмерительное устройство | 1981 |
|
SU979899A1 |
| Плотномер | 1985 |
|
SU1286942A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Поплавковый плотномер жидкостей | 1990 |
|
SU1749762A1 |
| ДАТЧИК ТЕМПЕРАТУРЫ | 1973 |
|
SU365587A1 |
СПОСОБ НАСТРОЙКИ ПНЕВМОСИЛОВОГО ПРЕОБРАЗОВАТЕЛЯ, содержащего рычажный элемент сравнения с регулируемой опорой и пневмосиловой элемент компенсации в виде сильфона в линии отрицательной обратной связи, включающий коррекцию нуля и настройку верхнего предела измерения путем перемещения опоры вдоль рычага, отличающийся тем, что, с целью повышения точности измерения преобразователя путем линеаризации его выходной статической характеристики, дополнительно, с помощью дроссельного сумматора, включенного в линию отрицательной обратной связи, путем изменения проводимости его пневмосопротивлений, а также смещения опоры и повторной коррекции нуля устанавливают начало и конец диапазона измерения преобразователя и снимают его статическую характеристику, а затем указанный процесс повторяют до получения нелинейности выходной статиi ческой характеристики, не превышающей заданную. (Л С I .-I- -I II I Г Ч 4&ь СО ч Ф Ф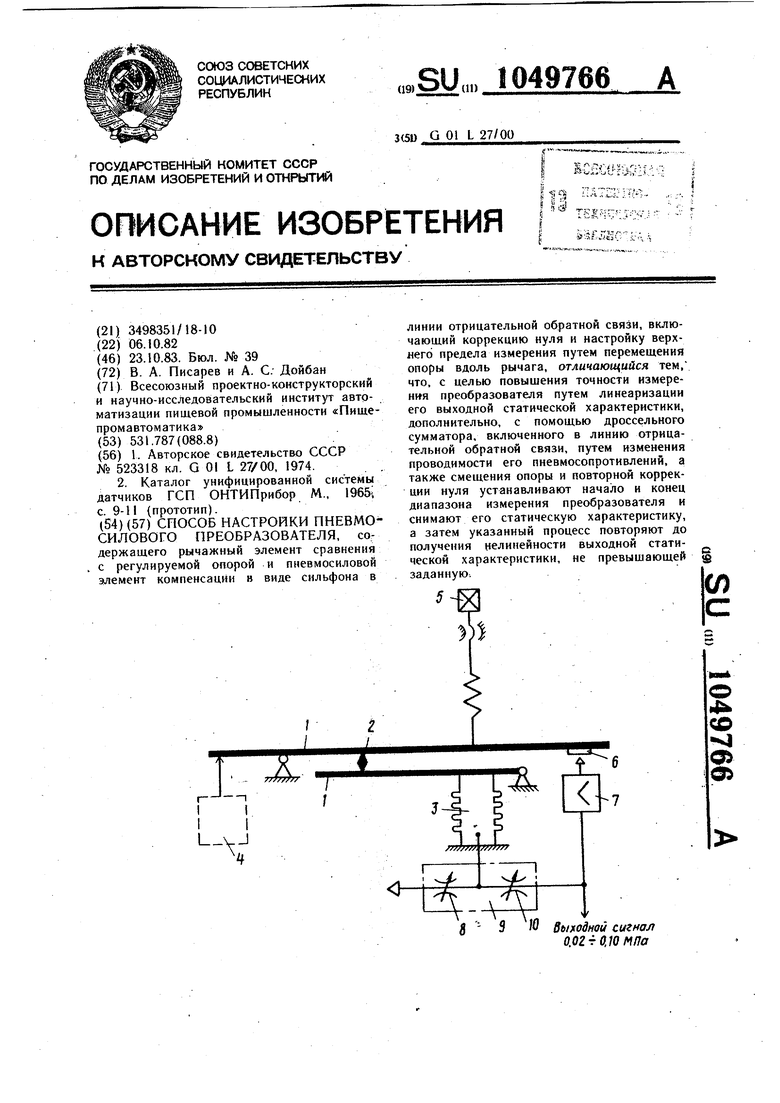
| I | |||
| Способ динамической градуировки устройств для измерения давления | 1974 |
|
SU523318A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каталог унифицированной системы датчиков ГСП ОНТИПрибор М., 1965i с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
