Изобретение относится к радиотехнике и может быть использовано в при J емных устройствах частотно-модулированных (чм) сигналов , Известен следящий фильтр, содержа щий сое;ф1нрнные последовательно пере страиваемый фильтр, ограничитель, : частотный детектор, усилитель, корректирующую цепь и реактивный модуля тор, выход которого соединен с управ ляющим входом переустраиваемого фильт ра 1 . Однако указанный фильтр требует первоначальной настройки на частоту несущего колебания и не может быть использован для следящего приема ЧМ сигналов с неизвестной частотой несущего колебания. Наиболее близким к предлагаемому по технической сущности является следующий фильтр, содержащий моделятор., вход и выход которого являются входом и выходом следящего фильтра соответственно, и форглирователь весо вой функции, выход которого соединен с управлягацим входом моделятора. Известно, что форма частотной характеристики и частота настройки фильтра определяется видом весовой функции, сшзанной с импульсной характеристикой фильтра соотношением MUUTog -f), гдеV{x) - весовая функция; (i - импульснаяреакция синтезируемого фильтра} Т - время обработки сиг нала в моделяторе; V- скорость записи весовой функции на безынерционном фото резистивном слое моделятора 2 . Однако фильтры такого типа Имеют постоянные параметры, в них не предусмотрена возможность автоматичкой перестройки фильтра вслед за изменяющейся частотой принимаемого ЧМ сивнала, поэтому они не могут использоваться для реализации следящего приема ЧМ, обеспечивающего в{лсокую помехоустойчивость. При использовании фильтра с постоянными параметрами в радиотракте ЧМ приемника полоса пропускания такого фильтра П, выбирается из условия п .,где Пф - полоса пропускания фильтра д1 ,, - девиация частоты п ринимае мого сигнала. При использовании в радиотракте 4t4 приемника следящего фильтра его полоса пропускания П выбирается из условия с.ф2Ртс где Fpfc верхняя частота модуляции ЧМ сигнала. Таким оезразом, при приеме ЧМ сигнала полоса пропускания фильтра с постоянными параметрами должна быть шиое полосЕл пропускания следящего (фильтравv, раз, где л, 1П5 me - - декс ЧМ сигнала. в том с-пучае, когда частота несущей принимаемого сигнала неизвестна или может изменяться в процессе рабо-ил (например, в.следствие допплеровского сдвига частот), полосу пропускания фильтра с постоянными параметрами следует еще более расширить. Чем шире Полоса пропускания фильтра, стоящего в радиотракте приемника, тем больше уровень на входе детектора и хуже помехозащищенность приема. Использование фильтра с постоянными параметрами на моделяторе в приемниках ЧМ сигналов с неизвестной или изменяющейся частотой несущего колебания не позволяет получить высокую помехозащищенность приема. Цель изобретения - повышение помехозащищенности при фильтрации частотно-модулированных сигналов с произвольной несущей частотой. Поставленная цель достигается тем, что в следящем фильтре, содержащем моделятор, вход и выход которого являются входом и выходом следящего фильтра соответственно, и формирователь весовой функции, выход которого соединен с управляющим входом моделятора, вход и выход следящего фильтра соединены с первым и вторым входами форг/ирователя весовой функции соответственно, формирователь весовой функции содержит генератор, блок переключения, первый сигнальный вход которого является первым входом, а выход - выходом формирователя весовой функции, и фильтр частот, вход которого является вторым входом формирователя весовой функции, а выход соединен с вторым сигнальным входом блока переключения, между вторым входом формирователя весовой функции и третьим сигнальным входом блока переключения включены последовательно фильтр верхних частот, блок перемножения , другой вход которого соединен с выходом генератора, и фазовращатель, между выходом фильтра верхних ,5стот, и управляклчим входом блока
переключения вклк5чен амплитудный детектор.
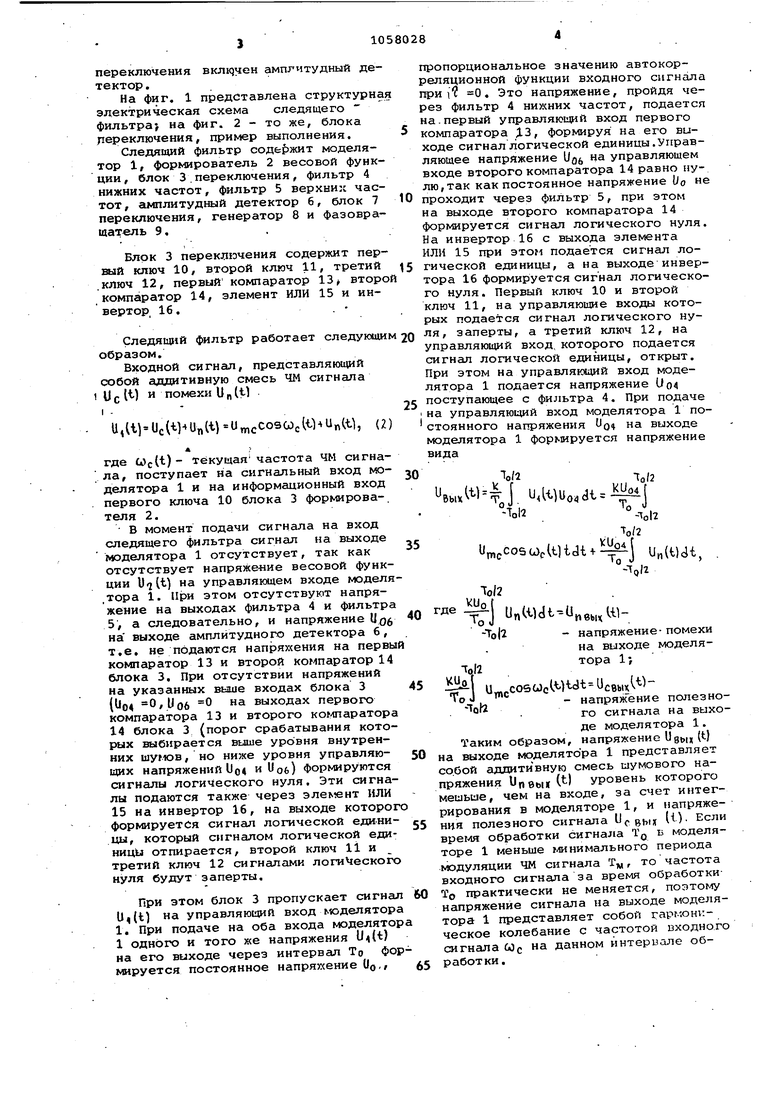
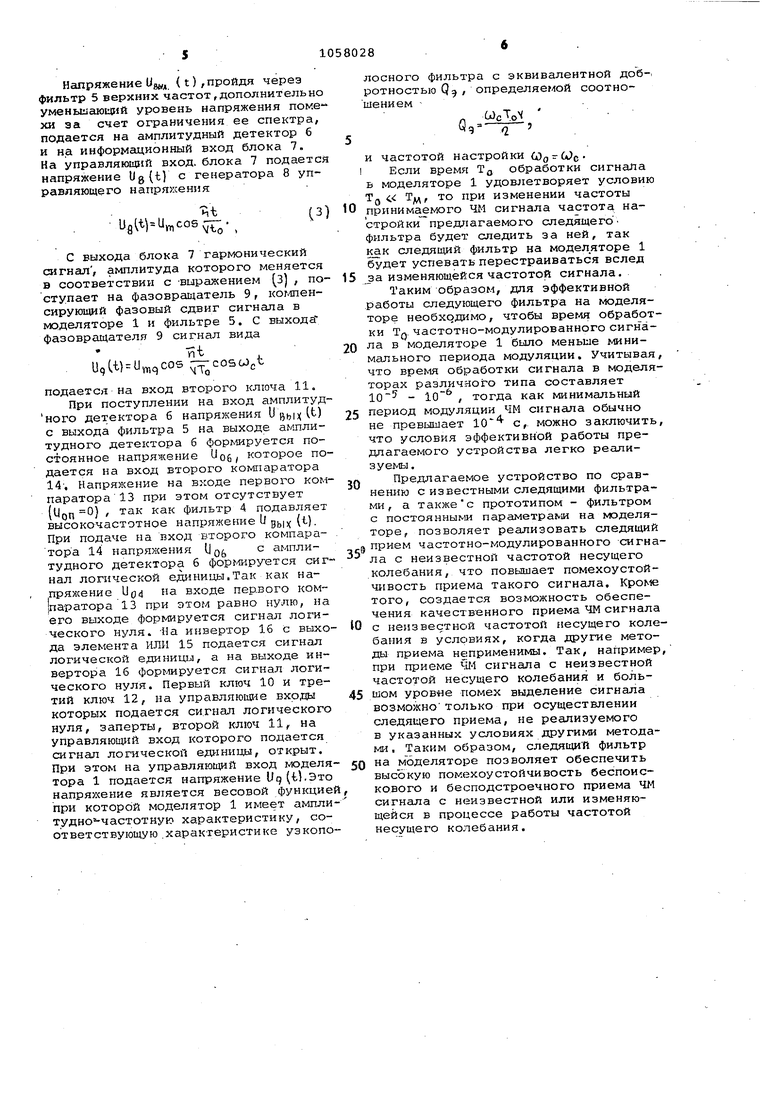
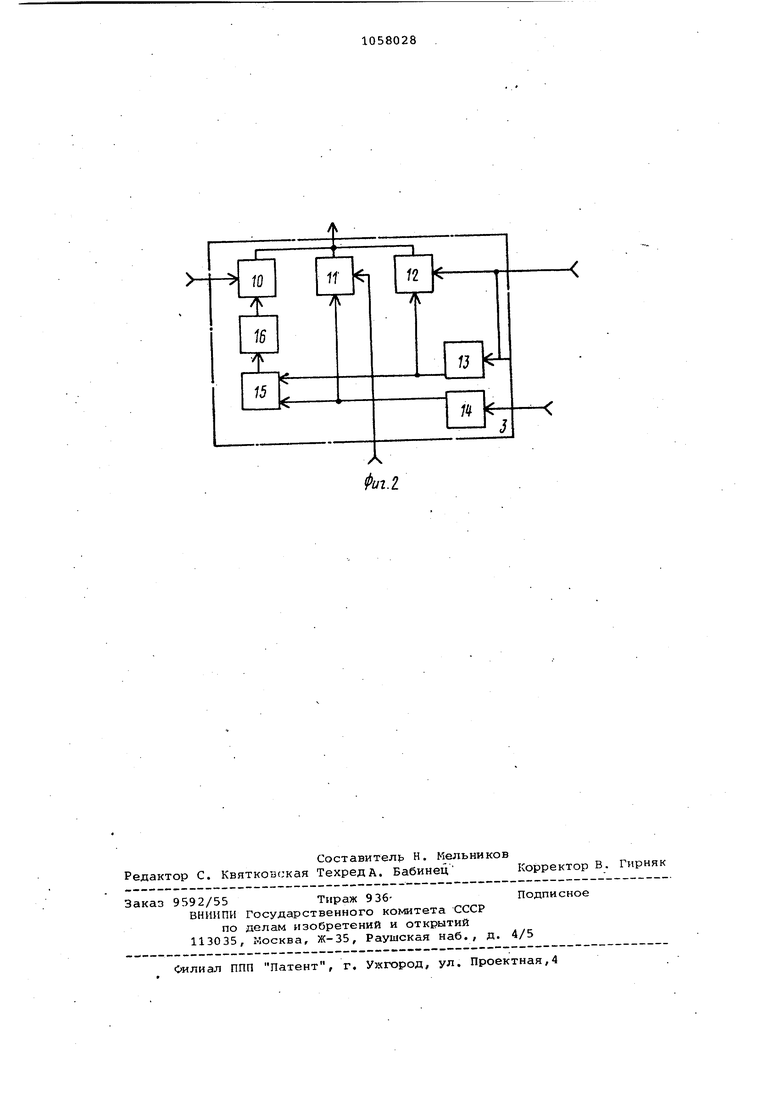
На фиг. 1 представлена структурная электрическая схема следящего фильтра; на фиг. 2 - тс же, блока переключения, пример выполнения.
Следящий фильтр соде&жит моделятор 1, формирователь 2 весовой функции, блок 3.переключения, фильтр 4 нижних частот, фильтр 5 верхних частот, амплитудный детектор 6, блок 7 Ю переключения, генератор 8 и фазовращатель 9.
Блок 3 переключения содержит первый ключ 10, второй ключ 11, третий 5 ключ 12, первый компаратор 13 второй компаратор 14, элемент ИЛИ 15 и инвертор 16.
Следящий фильтр работает следующим 20 бразом.
Входной сигнсш, представляющий собой аддитивную смесь ЧМ сигнала У Р (t) и помехи и п (tl
I-25
U,U)Uc(thUn(t)U cCOSWcitVU tl, (2) i
А;.
где Wcit) - Текущая частота ЧМ сигнала, поступает на сигнальный вход мо- ,« делятора 1 и на информационный вход первого ключа 10 блока 3 формирова-. теля 2.
В момент подачи сигнала на вход следящего фильтра сигнал на выходе моделятора 1 отсутствует, так как отсутствует напряжение весовой функции UT) управляющем входе моделятора 1. При этом отсутствуют напряжение на выходах фильтра 4 и фильтра 5, а следовательно, и напряжение UQ на выходе амплитудного детектора 6, т.е. не подаются напряжения на первый компаратор 13 и второй компаратор 14 блока 3. При отсутствии напряжений на указанных выше входах блока 345
(Ilo4 0,Uo6 выходах первого компаратора 13 и второго KOf inapaTopa
14блока 3 (порог срабатывания которых выбирается выше уровня внутренних шумов, но ниже уровня управляю- 50 щих напряжений Uo4 иUoe) формируются сигналы логического нуля. Эти сигналы подаются также через элемент ИЛИ
15на инвертор 16, на выходе которого формируется сигнал логической едини- ее
цы, который сигналом логической единихДл отпирается, второй ключ Ни третий ключ 12 сигналами логического нуля будут заперты.
Гфи этом блок 3 пропускает сигнал 60 U,(t) на управляющий вход моделятора 1. При подаче на оба входа моделятора 1 одного и того же напряжения (i/(M на его выходе через интервал То формируется постоянное напряжение UQ,, 5
пропорциональное значению автокорреляционной функции входного сигнала при 0. Это напряжение, пройдя через фильтр 4 нижних частот, подается на.первый управляющий вход первого компаратора Д.З, формируя на его виходе сигнал логической единицы.Управляющее напряжение UQ на управляющем входе второго компаратора 14 равно пулю, так как постоянное напряжение 1/о н проходит через фильтр 5, при этом на выходе второго компаратора 14 формируется сигнал логического нуля На инвертор 16 с выхода элемента ИЛИ 15 при этом подается сигнал логической единицы, а на выходе инвертора 16 формируется сигнал логического нуля. Первый ключ 10 и второй ключ 11, на управляющие входа которых подается сигнал логического нуля, заперты, а третий ключ 12, на управляющий вход, которого подается сигнал логической единицы, открыт. При этом на управлякядий вход моделятора 1 подается напряжение Uo4 поступающее с фильтра 4. При подаче на управляющий вход моделятора 1 постоянного напряжения Чц на выходе моделятора 1 формируется напряжение вида
1о/2- 12
4.xW4J UAt)Uo,
.
Ло/2
)t)ldt.j UnUlcii,
-Toll
lo/2
yij J
-«- if j Un(ildi-U,
пвьщ
-To|2 - напряжение-помехи на выходе моделяto(2тора 1;
1 U C05COoCMWt-lJcBb,
°л напряжение полезно°.го сигнала на выходе моделятора 1.
Таким образом, напряжение Ugbi W на выходе моделятора 1 представляет собой аддитивную смесь шумового напряжения И вы 1 уровень которого Meuibuie, чем на входе, за счет интегрирования в моделяторе 1, и напряжения полезного сигнала U( g),,, (l). Если BpeivOT обработки сигнала TQ Б моделяторе 1 меньше 4инимaльнoгo периода модуляции ЧМ сигнала Т„, то частота входного сигнала за время обработкиТо практически не меняется, пoзтo y напряжение сигнала на выходе моделятора 1 представляет собой гармоническое колебание с частотой входного сигнала со на данном интервале обработки. Нсшряжение Ug,, (t) , пройдя через фильтр 5 верхних частот,дополнительно уменьыаю1ций уровень напряжения поме хи за счет ограничения ее спектра, подается на амплитудный детектор б и н,а информационный вход блока 7. На управляющий вход, блока 7 подаетс напряжение Ug(t} с генератора 8 управляющего напряжения Ht . С выхода блока 7 гармонический сигнал, амплитуда которого меняется в соответствии с выражением (З) , по ступает на фазовращатель 9, ког.1пенсирующий фазовый сдвиг сигнала в моделяторе 1 и фильтре 5. С выходаг фазовращателя 9 сигнал вида -nt ) .)ct подается на вход второго ключа 11. При поступлении на вход амплитуд ного детектора б напряжения ( с выхода фильтра 5 на выходе амплитудного детектора 6 фop /иpyeтcя постоянное напряжение об, которое по дается на вход второго компаратора 14-, Напряжение на входе первого ком паратора 13 при этом отсутствует (UOH ) как фильтр 4 подавляет высокочастотное напряжение U ()При подаче на вход второго компаратора 14 напряжения UQ с анплитудного детектора б фop Iиpyeтcя сиг нал логической единицы.Так как напряжение 004 на входе первого ком паратора 13 при этом равно нулю, на его выходе формируется сигнал логического нуля. -На инвертор 16 с выхо да элемента ИЛИ 15 подается сигнал логической единицы, а на выходе инвертора 16 формируется сигнал логического нуля. Первый ключ 10 и третий ключ 12, на управляющие вхр,1да которых подается сигнгш логического нуля, заперты, второй ключ 11, на управляющий вход которого подается сигнал логической единицы, открыт, При этом на управляющий вход моделя тора 1 подается напряжение Uq (ЬЭто напряжение является весовой функцие при которой моделятор 1 имеет ампли тудно -частотную характеристику, соответствующую .характеристике уэкопо лосного фильтра с эквивалентной доб-ротностью Qg, определяемой соотношением,, WcToX и частотой настройки (Од- сЕсли время TO обработки сигнала в моделяторе 1 удовлетворяет условию Тд Тдд, то при изменении частоты принимаемого ЧМ сигнала частота настройки предлагаемого следящего фильтра будет следить за ней, так следящий фильтр на моделяторе 1 будет успевать перестраиваться вслед за изменяющейся частотой сигнала. Таким образом, для эффективной работы следующего фильтра на моделяторе необходимо, чтобы время обработки TQ частотно-модулированного в моделяторе 1 было меньше минимального периода модуляции. Учитывая, что время обработки сигнала в моделяторах различного типа составляет - 10 , тогда как минимальный период модуляции ЧМ сигнала обычно не превышает 10 с, можно заключить, что условия эффективной работы предлагаемого устройства легко реализуемы. Предлагаемое устройство по сравнению с известными следящими фильтрами , а такжес прототипом - фильтром с постоянными параметрами на моделяторе, позволяет реализовать следящий прием частотно-модулированного сигнала с неизвестной частотой несущего колебания, что повышает помехоустойчивость приема такого сигнала. Кроме того, создается возможность обеспечения качественного приема ЧМ сигнала с неизвестной частотой несущего колебания в условиях, когда другие методы приема неприменимы. Так, например, при приеме Ч1Л сигнала с неизвестной частотой несущего колебания и большом уровне помех выделение сигнала ВОЗМОЖНО только при осуществлении следящего приема, не реализуемого в указанных условиях другими методами , Таким образом, следящиТ фильтр на моделяторе позволяет обеспечить высокую помехоустойчивость беспоискового и бесподстроечного приема ЧМ сигнала с неизвестной или изменяющейся в процессе работы частотой несущего колебания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный фильтр | 1981 |
|
SU1008888A1 |
| Адаптивный фильтр | 1984 |
|
SU1224983A2 |
| Цифровой формирователь частотно-модулированных сигналов с низким уровнем искажений | 2021 |
|
RU2765273C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ДВУХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ПЕРЕКРЫВАЮЩИМИСЯ СПЕКТРАМИ | 1991 |
|
RU2065666C1 |
| Устройство приема зондирующего сигнала | 1987 |
|
SU1566495A1 |
| Частотный модулятор для устройств магнитной видеозаписи | 1984 |
|
SU1254593A1 |
| Радиоимпульсный фазометр | 1982 |
|
SU1081561A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА СПЕКТРА НЕПРЕРЫВНОГО РАДИОСИГНАЛА С ШИРОКОПОЛОСНОЙ ГАРМОНИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2019844C1 |
| Устройство приема зондирующих сигналов | 1981 |
|
SU1059681A1 |
| Анализатор гармоник | 1980 |
|
SU945821A2 |
СЛЕДЯЩИЙ ФИЛЬТР, содержащий моделятор, вход и выход которого являются входом и выходом следящего фильтра соответственно, и форкирователь весовой функции, выход которого соединен с управляюищм входом моделятора, отличающийся тем, что, с целью повышения помехозащищенности при фильтрации частотно-модулигщ ts 3 рованных сигнсшов с произвольной несущей частотой, вход и выход следящего 4 5льтра соединены с первым и вторым входами формирователя весовой функции соответственно, формирователь весовой функции содержит генератор, блок переключения, первый сигнальный вход которого является первым входом, а выход - выходом формирователя весовой функции, и фильтр нижних частот, вход которого является вторым входом форь/1ирователя весовой функции, а выход соединен с вторым сигнальным входом блока переключения, между вторым входом формирователя весовой функции и третьим сигнальным входом блока переключения включены последователь- но фильтр верхних частот, блок пере- (Л множения, другой вход которого соединен с выходом генератора, и фазовращатель, между выходом фильтра верхних частот и управляющим входом блока переключения включен амплитудный де- S тектор.-,.