о
ел
со
нй
i--СД
Изобретение относится к приборам для исследования физических свопств и состояния горных пород в Массиве.
Известны устройства для определения состояния горных пород в массиве ультразвуковым способом, включающие скважинные излучатель и приемник ультразвуковых колебаний, прибор для измерения времени распространения колебаний между датчиками, досылочные штанги и приспособление для измерения расстояния между скважинами l .
Однако данные устройства обладают низкой точностью вс7.едствие значительных погрешностей определения расстояния между датчиками в случае непараллельных скважин.
Наиболее близким по технической сущности к изобретению является устройство для определения расстояния между датчиками в скважине, включающее досылочные штанги, на которых нанесены измерительные шкалы, датчики, закреплённые на концах досылочных штанг, и фиксатор с измерительной шкалой, на KOTOIJOM размещены держатели досылочных штанг Однако известное устройство харатеризуется низкой точностью определения расстояния между датчиками.
Цель изобретения - повышение точности измерений.
Указанная цель достигается тем, что в устройстве для измерения расстояния между датчиками в скважинах включающем досылочные штанги, на которых нанесены измерительные шкалы, датчики, .закрепленные на концах досылочных штанг, и фиксатор с измерительной шкалой, .на котором размещены держатели досылочных штанг, фиксатор выполнен в виде стержня, а держатели - со сквозными отверстиями для установки досылочных штанг, при этом один держатель закреплен на конце стержня посредством шарнир с возможностью поворота в плоскости параллельной оси стержня, а второй держатель выполнен в виде шарнира с возможностью поворота в плоскости перпендикулярной стержню, и имеет сквозное отверстие для стержня, причем шарниры снабжень т указателями отсчета глов.
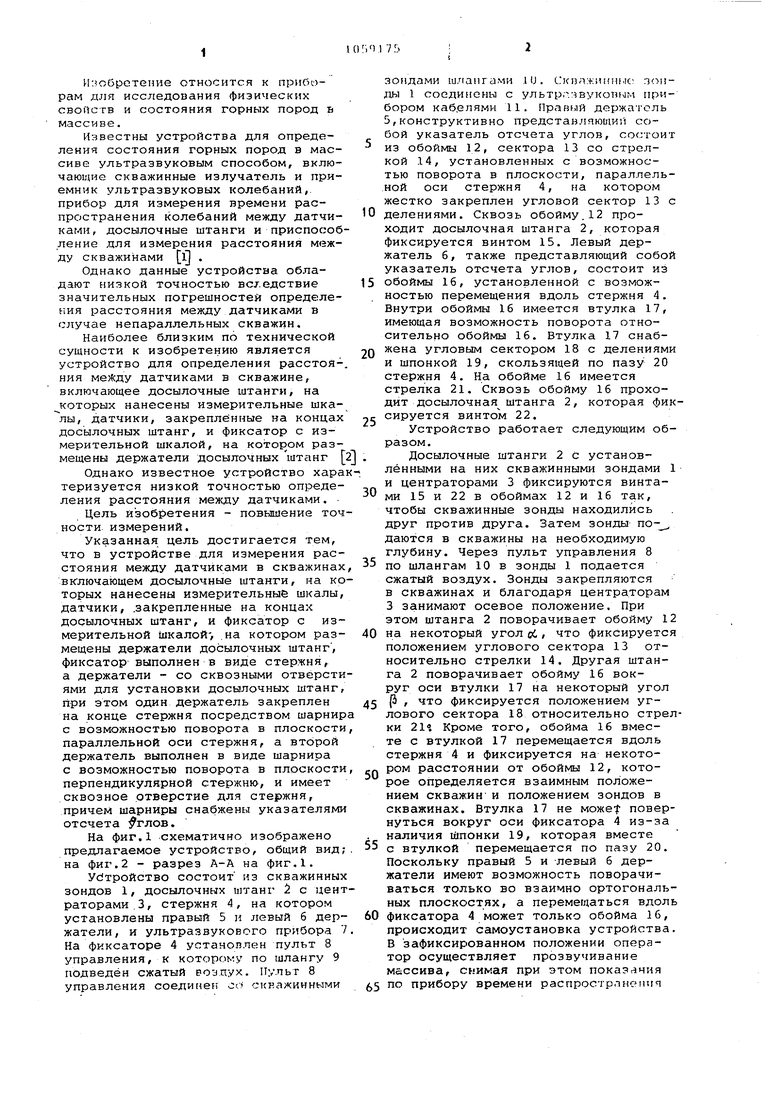
На фиг.1 схематично изображено предлагаемое устройство, общий вид; на фиг.2 - разрез А-А на фиг.1.
Ус тройство состоит из скважинных зондов 1, досылочннх штанг 5 с центраторами. 3, стержня 4, на котором установлены правый 5 и левый б держатели, и ультразвукового прибора 7 На фиксаторе 4 устаноплен пульт 8 управления, к которому по шлангу 9 подведён сжатый воалух. Пульт 8 управления соединен ос.- сккажинными
зондами шлангами .1U. С1С1зажи1(мыс зонды 1 соедииомы с ультрр.: вуковым прибором каб.елями 11. Правый держачсль 5, конструктивно представляющиГ собой указатель отсчета углов, состоит из обоймы 12, сектора 13 со стрелкой 14, установленных с возможностью поворота в плоскости, параллельной оси стержня 4, на котором жестко закреплен угловой сектор 13 с делениями. Сквозь обойму.12 проходит досылочная штанга 2, которая фиксируется винтом 15. Левый держатель 6, также представляющий собой указатель отсчета углов, состоит из обоймы 16, установленной с возможностью перемещения вдоль стержня 4. Внутри обоймы 16 имеется втулка 17, имеющая возможность поворота относительно обоймы 16. Втулка 17 снабжена угловым сектором 18 с делениями и шпонкой 19, скользящей по пазу 20 стержня 4. На обойме 16 имеется стрелка 21. Сквозь обойму 16 проходит досылочная штанга 2, которая фиксируется винтом 22.
Устройство работает следующим образом.
Досылочные штанги 2 с установленными на них скважинными зондами 1 и центраторами 3 фиксируются винтами 15 и 22 в обоймах 12 и 16 так, чтобы скважинные зонды находились друг против друга. Затем зонды по- даются в скважины на необходимую глубину. Через пульт управления 8 по шлангам 10 в зонды 1 подается сжатый воздух. Зонды закрепляются в скважинах и благодаря центраторам 3 занимают осевое положение. При этом штанга 2 поворачивает обойму 12 на некоторый угол oi / что фиксируется положением: углового сектора 13 относительно стрелки 14. Другая штанга 2 поворачивает обойму 16 вокруг оси втулки 17 на некоторый угол Р , что фиксируется положением углового сектора 18 относительно стрелки 21 Кроме того, обойма 16 вместе с втулкой 17 перемещается вдоль стержня 4 и фиксируется на некотором расстоянии от обоймы 12, которое определяется взаимным положением скважин и положением зондов в скважинах. Втулка 17 не мoжet повернуться вокруг оси фиксатора 4 из-за наличия Шпонки 19, которая вместе с втулкой перемещается по пазу 20. Поскольку правый 5 и левый 6 держатели имеют возможность поворачиваться только во взаимно ортогональных плоскостях, а перемещаться вдоль фиксатора 4 может только обойма 16, происходит самоустановка устройства. В зафиксированном положении оператор осуществляет прозвучивание массива, снимая при этом показг чия по прибору времени распрострлнемшч сигнала и считывая показания углов и расстояния между обоймами. Затем сжатый воздух стравливается в атмо феру зонды перемещаются на очеред ную позицию и операции повторяются Скорость распространения упругой волны рассчитывают по формуле V -j--| 4 а(1-созлсо5рУ2оЬ sAnot, ,где t - время распространения сигнала; Ь - расстояние между обоймам а - расстояние между зондами и продольной осью фиксат ра; oCip - углы, считываемые соотве венно с правого и левого указателей отсчета углов Принятая в соответствии с выражением (1) система отсчета углов ui и ft , безразлична к знаку угла и предусматривает дпя угла оС знак /+ в случае сходящихся скважин и. знак для расходящихся. Определить точную величину относительной погре1йности выражения (1) не п)редставляется возможным, однако максимально возможная относительная погрешность, определения скорости упругих волн может быть оценена из выражения. (Lf-cosif-cosq) Ь qi -. X TVt l+2S ncpt2siirtC() Выражение (2) получено в предпо ложении, чтоаЪ йО лх, а &(. Таким образом, в выражении (2) вел представляет собой относительную погрешность измерения времени распространения сигнала, второе слагаемое определяет погрешность измерения угловых величин и третье - линейных, т.е. величин а и Ь. В предлагаемом устройстве точность определения линейных величин определяется лишь абсолютным значением и точностью определения величины Ь, поскольку величина а фиксирована. При использовании известных устройств, максимально возможная погрешность -- определяется точностью, с которой определяется положение зондов как относительно друг друга, так и по длине скважин. Иными словами, вояникает необходимость вычислять величину а, а это как минимум на порядок увеличивает А 5f величину -, поскольку при вычислениях используется величина шага измерений (шага перестановки зондов), которая на порядок меньше, чем сама величина а. Однако на практике погрешность определения величины а гораздо выше и значение - сравнимо по величине со вторым слагае11«ам в выражении (2) . Таким образом, предлагаемое устройство значительно повышает точность измерений скоростей распространения упругих волн, осуществляемых методом прозвучивания массива между двумя некомпленарно расположенными скважинами, поскольку устраняет ошибки вычислений, связанных с неточностью определения положения зондов как относительно друг друга, так и по длине скважин. Кроме того, за счет совмещения-операций по установке зондов, определения времени распространения сигнала и определения расстояния между зондами обеспечивается высокая производительность измерений.
фиа /
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения состояния горных пород в массиве | 1980 |
|
SU1141195A1 |
| Акустополярископ для измерения упругости образцов твердых материалов | 1990 |
|
SU1783412A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ МАССИВА ГОРНЫХ ПОРОД ПО ОСИ СКВАЖИНЫ | 2008 |
|
RU2364721C1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛАВНЫХ НОРМАЛЬНЫХ НАПРЯЖЕНИЙ В МАССИВЕ ГОРНЫХ ПОРОД | 1994 |
|
RU2064579C1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ КОНФИГУРАЦИИ ПОВЕРХНОСТИ СКВАЖИНЫ | 1992 |
|
RU2035592C1 |
| СКВАЖИННЫЙ ИНКЛИНОМЕТРИЧЕСКИЙ ЗОНД И СКВАЖИННАЯ ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ СДВИЖЕНИЙ ГОРНЫХ ПОРОД И ЗАКЛАДОЧНОГО МАССИВА С ЕГО ИСПОЛЬЗОВАНИЕМ | 2014 |
|
RU2558556C1 |
| Способ определения напряженного состояния массива горных пород | 2019 |
|
RU2704086C1 |
| Устройство для контроля деформированного состояния массива горных пород | 1988 |
|
SU1521873A1 |
| Устройство для определения кривизны скважин | 1978 |
|
SU746096A1 |

УСТРОЙСТбО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ДАТЧИКАМИ В СКВАЖИНАХ, включающее досылочные штанги, va которых нанесены измерительные шкалы, датчики, закрепленные на концах досылочных штанг, и фиксатор с измерительной шкалой, на котором размешены держатели досылочных штанг, отличаюцеес я тем, что, с целью повышения точности измерений, фиксатор выполнен в виде стержня, а держатели - со сквозными отверстиями для установки досылочных штанг, при этом один держатель закреплен на коице стержня посредством шарнира с возможностью поворота в плоскости, паргшлельной . оси стержня, а второй держатель выполнен в виде шарнира с воз)южностыо поворота в плоскости/ перпендикулярной стержню, и имеет сквозное отСО верстие для стержня, причем шарниры снабжены указателями отсчета углов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Турчанинов И.А., Панин В.И | |||
| Геофизические методы определения и контроля напряжений в массиве | |||
| Л., Недра, 197«, с.33-37 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Меденков Ф.Г | |||
| Повышение эффективности добычи и переработки комплекснЕох руд | |||
| Апатиты, иэд-во КФАН СССР, 1977, с.8-12. | |||
