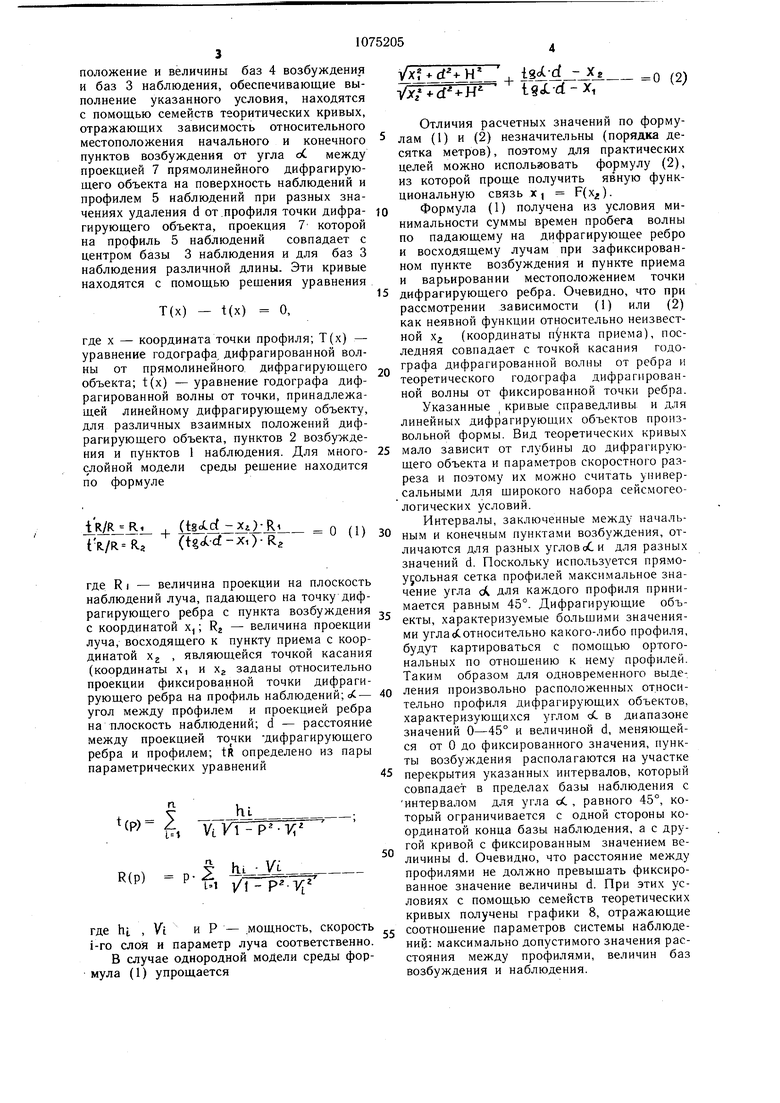
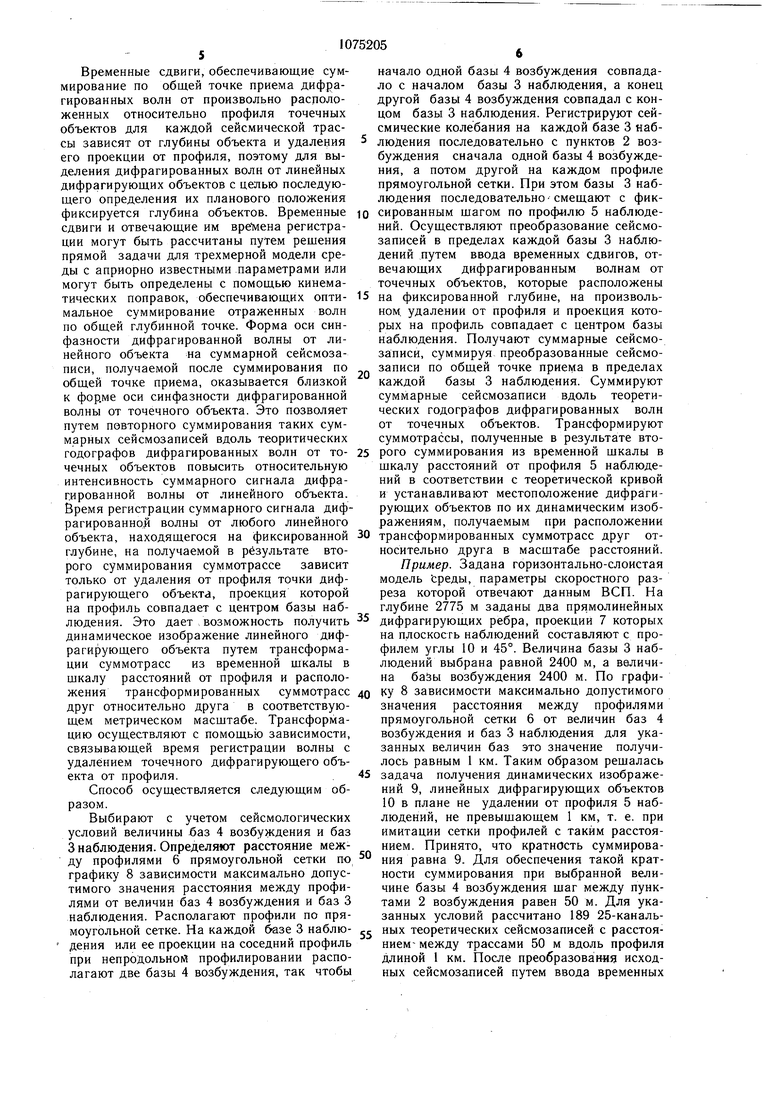
Изобретение относится к сейсмической разведке и может быть использовано для картирования таких элементов геологических объектов, которые имеют малые радиусы кривизны или характеризуются резкими изменениями физических свойств пород в плане, в частности краевых частей рифов, контактов различных пород, разломов, зон выклинивания, контуров залежей углеводородов. Известен способ сейсмической разведки, включающий возбуждение и регистрацию волн по системе многократного продольного и непродольного профилирования по сетке профилей и суммирование полученных при различных комбинациях расположения источников возбуждения колебаний и сейсмоприемников сеисмотрасс, предварительно сдвинутых на время пробега волны от источника возбуждения до предполагаемого при сканировании точечного дифрагирующего объекта и далее до сейсмоприемника. По параметрам сканирования, которые отвечают выделенным на суммотрассах наиболее интенсивным сейсмическим сигналам с нулевым временем вступления, устанавливают местоположение соответствующих дифрагирующих объектов 1. Недостатком способа является то, что он не позволяет обнаруживать и трассировать линейные дифрагирующие объекты. Наиболее близким техническим решением является способ сейсмической разведки, включающий возбуждение колебаний на базах возбуждения и регистрацию колебаний на базах наблюдения по системе многократного профилирования по сетке продольных и непродольных профилей и последующее суммирование колебаний по общим точкам дифракции для каждой базы наблюдений 2. Недостатком способа является то, что он не позволяет трассировать линейные дифрагирующие объекты и поэтому не обеспечивает необходимую точность разведки. Целью изобретения является повыщение точности разведки на основе определения местоположения произвольно расположенных линейных дифрагирующих объектов. Поставленная-цель достигается тем, что согласно способу сейсмической разведки. включающему возбуждение колебаний на базах возбуждения и регистрацию колебаний на базах наблюдения по системе многократного профилирования по сетке продольных и непродольных профилей и последующее суммирование колебаний по общим точкам дифракции для каждой базы наблюдения, на каждой базе наблюдения располагают две базы возбуждения, причем начало одной базы возбуждения совпадает с началом базы наблюдения, а конец другой базы возбуждения совпадает с концом базы наблюдения, при этом расстояние между профилями, располагаемыми по прямоугольной сетке, выбирают по графику зависимости его максимально допустимого значения от величин баз возбуждения и наблюдения, при этом суммирование колебаний по общим точкам дифракции проводят для каждой фиксированной глубинй, а полученные суммарные колебания дополнительно суммируют вдоль годографов дифрагированных волн от точек дифракции, трансформируют временную шкалу полученных при этом суммотрасс в щкалу удалений от профиля и устанавливают местоположение линейных дифрагирующих объектов по их динамическим изображениям. Кроме того, при, использовании непродольных профилей, базы возбуждения располагают на проекции базы наблюдений на соседний профиль. На фиг. 1 приведена система наблюдений на обобщенной плоскости в пределах одной базы наблюдения для кратности суммирования; на фиг. 2 - прямоугольная сетка профилей; на фиг. 3 - графики соотношения параметров системы наблюдений; на фиг. 4 - динамические изображения двух прямолинейных дифрагирующих объектов. Система наблюдений содержит пункты 1 наблюдения, пункты 2 возбуждения; базу 3 наблюдения, базу 4 возбуждения, профиль 5 наблюдений, профили 6 прямоугольной сетки, проекцию 7 линейного дифрагирующего объекта на поверхность наблюдений, графики 8 соотнощения параметров системы наблюдений, динамические изображения 9, линейные дифрагирующие объекты 10. Сущность изобретения заключается в том, что попадание точки касания годографов дифрагированных волн от линейного дифрагирующего объекта и от точки ребра на базу 3 наблюдений при любом расположении линейных дифрагирующих объектов обеспечивается при наблюдении по профилям 6 прямоугольной сетки при выборе расстояний между ними, обеспечивающих регистрацию этой точки для ребра, проекция 7 которого составляет угол 45° с профилем 5 наблюдений, и расположении баз 4 возбуждения в пределах базы 3 наблюдения, Известно, что в окрестности точки касания годограф дифрагированной волны от линейного дифрагирующего объекта и теоретический годограф дифрагированной вол ны от точки этого объекта близки друг к другу. Поэтому, если расположить пункты 2 возбуждения таким образом, чтобы в пределы базы 3 наблюдения попадали точки касания для каждого из них, то можно суммировать дифрагированные волны от линейных дифрагирующих объектов по общей точке приема при использовании временных сдвигов, отвечающих дифрагированным волцам от точечных объектов. Взаимное расположение и величины баз 4 возбуждения и баз 3 наблюдения, обеспечивающие выПП.ПНРНИР укячяннпго vrnnnwa няупггатла полнение указанного условия, находятся с помощью семейств теоритических кривых, отражающих зависимость относительного местоположения начального и конечного пунктов возбуждения от угла оС между проекцией 7 прямолинейного дифрагирующего объекта на поверхность наблюдений и профилем 5 наблюдений при разных значениях удаления d от,профиля точки дифрагирующего объекта, проекция 7 которой на профиль 5 наблюдений совпадает с центром базы 3 наблюдения и для баз 3 наблюдения различной длины. Эти кривые находятся с помощью рещения уравнения t(x) О, где X - координата точки профиля; Т(х) - уравнение годографа дифрагированной волны от прямолинейного дифрагирующего объекта; t(x) - уравнение годографа дифрагированной волны от точки, принадлежащей линейному дифрагирующему объекту, для различных взаимных положений дифрагирующего объекта, пунктов 2 возбуждения и пунктов 1 наблюдения. Для многослойной модели среды рещение находится по формуле .,| Ct| j::Xi) п tR..a (tgc/:-cf-x,)-R где R I - величина проекции на плоскость наблюдений луча, падающего на точку дифрагирующего ребра с пункта возбуждения с координатой х,; Rj - величина проекции луча, восходящего к пункту приема с координатой Хг , являющейся точкой касания (координаты X, и Хг заданы относительно проекции фиксированной точки дифрагирующего ребра на профиль наблюдений; dC- угол между профилем и проекцией ребра на плоскость наблюдений; d - расстояние между проекцией точки -дифрагирующего ребра и профилем; tR определено из пары параметрических уравнений где hi. , Vl и Р - мощность, скорость i-ro слоя и параметр луча соответственно. В случае однородной модели среды формула (1) упрощается г - X VX Q ЛUs - -I1 Отличия расчетных значений по формулам (1) и (2) незначительны (порядка десятка метров), поэтому для практических целей можно использовать формулу (2), из которой проще получить явную функциональную связь X) F(x). Формула (1) получена из условия минимальности суммы времен пробега волны по падающему на дифрагирующее ребро и восходящему лучам при зафиксированном пункте возбуждения и пункте приема и варьировании местоположением точки дифрагирующего ребра. Очевидно, что при рассмотрении зависимости (1) или (2) как неявной функции относительно неизвестной х (координаты пункта приема), последняя совпадает с точкой касания годографа дифрагированной волны от ребра и теоретического годографа дифрагированной волны от фиксированной точки ребра. Указанные , кривые справедливы и для линейных дифрагирующих объектов произвольной формы. Вид теоретических кривых мало зависит от глубины до дифрагирующего объекта и параметров скоростного разреза и поэтому их можно считать универсальными для широкого набора сейсмогеологических условий. Интервалы, заключенные между начальным и конечным пунктами возбуждения, отличаются для разных углов оС и для разных значений d. Поскольку используется прямоу ольная сетка профилей максимальное значение угла (Л для каждого профиля принимается равным 45°. Дифрагирующие объекты, характеризуемые большими значения и угла (относительно какого-либо профиля, будут картироваться с помощью ортогональных по отношению к нему профилей. Таким образом для одновременного выделения произвольно расположенных относительно профиля дифрагирующих объектов, характеризующихся углом сС в диапазоне значений О-45° и величиной d, меняющейся от О до фиксированного значения, пункты возбуждения располагаются на участке перекрытия указанных интервалов, который совпадает в пределах базы наблюдения с интервалом для угла сС , равного 45°, который ограничивается с одной стороны координатой конца базы наблюдения, а с другой кривой с фиксированным значением величины d. Очевидно, что расстояние между профилями не должно превышать фиксированное значение величины d. При этих условиях с помощью семейств теоретических кривых получены графики 8, отражающие соотношение параметров системы наблюдений: максимально допустимого значения расстояния между профилями, величин баз возбуждения и наблюдения.
Временные сдвиги, обеспечивающие суммирование по общей точке приема дифрагированных волн от произвольно расположенных относительно профиля точечных объектов для каждой сейсмической трассы зависят от глубины объекта и удаления его проекции от профиля, поэтому для выделения дифрагированных волн от линейных дифрагирующих объектов с целью последующего определения их планового положения фиксируется глубина объектов. Временные сдвиги и отвечающие им времена регистрации могут быть рассчитаны путем рещения прямой задачи для трехмерной модели среды с априорно известными параметрами или могут быть определены с помощью кинематических поправок, обеспечивающих оптимальное суммирование отраженных волн по общей глубинной точке. Форма оси синфазности дифрагированной волны от линейного объекта на суммарной сейсмозаписи, получаемой после суммирования по общей точке приема, оказывается близкой к фор.ме оси синфазности дифрагированной волны от точечного объекта. Это позволяет путем повторного суммирования таких суммарных сейсмозаписей вдоль теоритических годографов дифрагированных волн от точечных объектов повысить относительную интенсивность суммарного сигнала дифрагированной волны от линейного объекта. Время регистрации суммарного сигнала дифрагированной волны от любого линейного объекта, находящегося на фиксированной глубине, на получаемой в результате второго суммирования суммотрассе зависит только от удаления от профиля точки дифрагирующего объекта, проекция которой на профиль совпадает с центром базы наблюдения. Это дает возможность получить динамическое изображение линейного дифрагирующего объекта путем трансформации суммотрасс из временной щкалы в щкалу расстояний от профиля и расположения трансформированных суммотрасс друг относительно друга в соответствующем метрическом масщтабе. Трансформацию осуществляют с помощью зависимости, связывающей время регистрации волны с удалением точечного дифрагирующего объекта от профиля.
Способ осуществляется следующим образом.
Выбирают с учетом сейсмологических условий величины баз 4 возбуждения и баз 3 наблюдения. Определяют расстояние между профилями 6 прямоугольной сетки по графику 8 зависимости максимально допустимого значения расстояния между профилями от величин баз 4 возбуждения и баз 3 наблюдения. Располагают профили по прямоугольной сетке. На каждой базе 3 наблюдения или ее проекции на соседний профиль при непродольноЯ профилировании располагают две базы 4 возбуждения, так чтобы
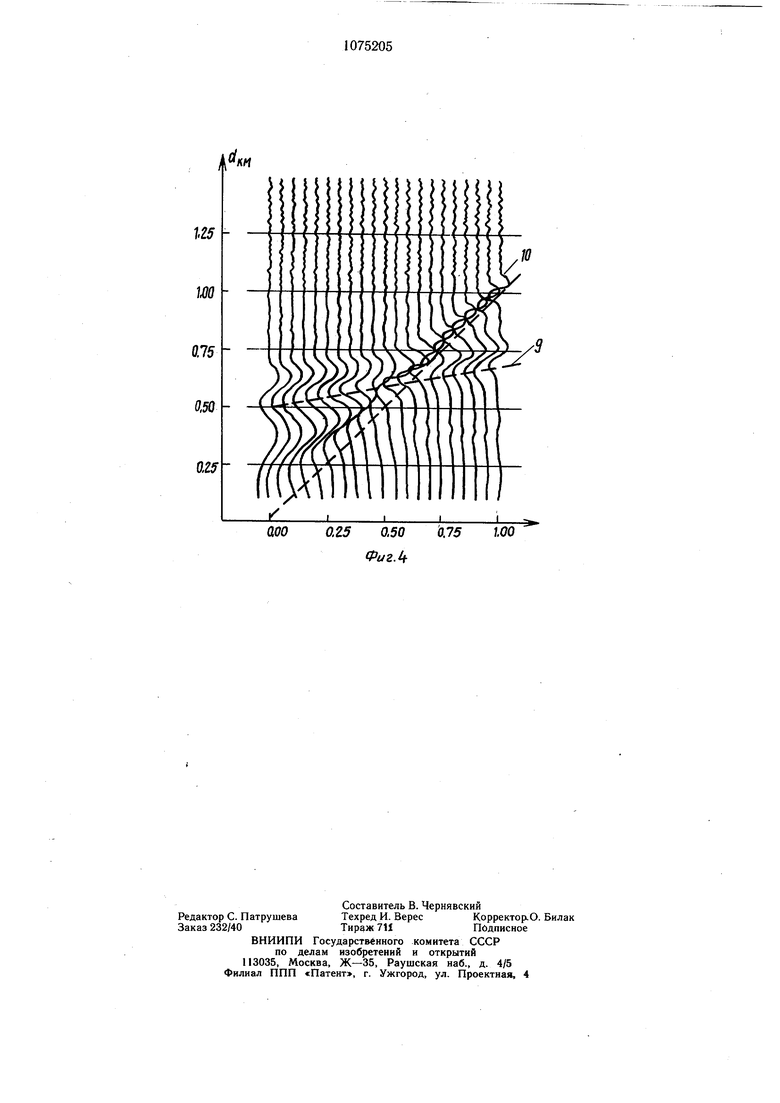
начало одной базы 4 возбуждения совпадало с началом базы 3 наблюдения, а конец другой базы 4 возбуждения совпадал с концом базы 3 наблюдения. Регистрируют сейсмические колебания на каждой базе 3 наблюдения последовательно с пунктов 2 возбуждения сначала одной базы 4 возбуждения, а потом другой на каждом профиле прямоугольной сетки. При этом базы 3 наблюдения последовательно-смещают с фиксированным щагом по профилю 5 наблюдений. Осуществляют преобразование сейсмозаписей в пределах каждой базы 3 наблюдений путем ввода временных сдвигов, отвечающих дифрагированным волнам от точечных объектов, которые расположены на фиксированной глубине, на произвольном, удалении от профиля и проекция которых на профиль совпадает с центром базы наблюдения. Получают суммарные сейсмозаписи, суммируя преобразованные сейсмозаписи по общей точке приема в пределах каждой базы 3 наблюдения. Суммируют суммарные сейсмозаписи вдоль теоретических годографов дифрагированных волн от точечных объектов. Трансформируют суммотрассы, полученные в результате второго суммирования из временной щкалы в щкалу расстояний от профиля 5 наблюдений в соответствии с теоретической кривой и устанавливают местоположение дифрагирующих объектов по их динамическим изображениям, получаемым при расположении трансформированных суммотрасс друг относительно друга в масщтабе расстояний. Пример. Задана горизонтально-слоистая модель Ьреды, параметры скоростного разреза которой отвечают данным ВСП. На глубине 2775 м заданы два прямолинейных дифрагирующих ребра, проекции 7 которых на плоскосгь наблюдений составляют с профилем углы 10 и 45°. Величина базы 3 наблюдений выбрана равной 2400 м, а величина байы возбуждения 2400 м. По графику 8 зависимости максимально допустимого значения расстояния между профилями прямоугольной сетки 6 от величин баз 4 возбуждения и баз 3 наблюдения для указанных величин баз это значение получилось равным 1 км. Таким образом рещалась задача получения динамических изображений 9, линейных дифрагирующих объектов 10 в плане не удалении от профиля 5 наблюдений, не превыщающем 1 км, т. е. при имитации сетки профилей с таким расстоянием. Принято, что кратность суммирования равна 9. Для обеспечения такой кратности суммирования при выбранной величине базы 4 возбуждения щаг между пунктами 2 возбуждения равен 50 м. Для указанных условий рассчитано 189 25-канальных теоретических сейсмозаписей с расстоянием- между трассами 50 м вдоль профиля длиной 1 км. После преобразования исходных сейсмозалисей путем ввода временных
сдвигов и выполнения операций суммирования и трансформирования получены динамические изображения 9, линейных дифрагируюш,их объектов 10 в плане, которые приведены . на фиг. 4. Отношение сигнал/ помеха увеличилось по отношению к исходному приблизительно в 6 раз.
Положительный эффект достигается путем сушественного сокрашения объемов сейсмических работ, необходимых при ис.пользовании существующих способов для ю картирования линейных дифрагирующих
объектов с такой же точностью как при использовании предлагаемого изобретения, поскольку известные способы позволяют лишь находить точки пересечения дифрагирующих объектов с профилем, причем при углах оС , близких к 90°, а предлагаемый способ позволяет практически непрерывно трассировать линейные дифрагирующие объекты, находящиеся в стороне от профиля. Кроме того, положительный эффект достигается за счет повышения геологической эффективности сейсмической разведки.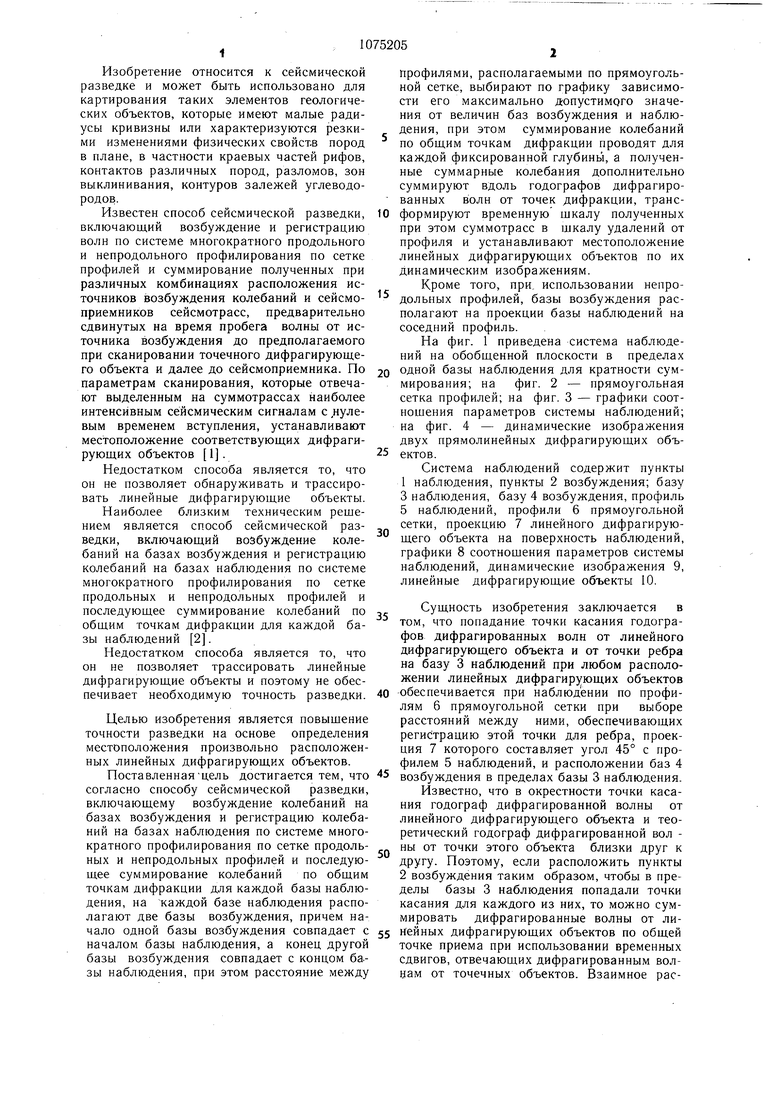
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2014 |
|
RU2559303C1 |
| Способ сейсморазведки | 1978 |
|
SU746367A1 |
| Способ сейсмической разведки | 1979 |
|
SU819769A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ ДЛЯ ПОВЫШЕНИЯ ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ | 2002 |
|
RU2255355C2 |
| Способ сейсмической разведки | 1989 |
|
SU1728814A1 |
| Способ сейсмической разведки | 1988 |
|
SU1522133A1 |
| Способ сейсмической разведки | 1984 |
|
SU1226373A1 |
| Способ пространственной сейсморазведки | 1981 |
|
SU1022091A1 |
| Способ сейсмической разведки | 1989 |
|
SU1698863A1 |
| СПОСОБ СЕЙСМИЧЕСКОГО ОБСЛЕДОВАНИЯ СВАЙНЫХ ФУНДАМЕНТОВ | 2005 |
|
RU2280267C1 |
1. СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ, включающий возбуждение колебаний на базах возбуждения и регистрацию колебаний на базах,наблюдения по системе многократного профилирования по сетке продольных и непродольных профилей и последующее суммирование колебаний по общим точкам дифракции для каждой базы наблюдений, отличающийся тем, что, с целью повыщения точности разведки на основе определения местоположения произвольно расположенных линейных дифрагирующих объектов, на каждой базе наЛЛпв блюдения располагают две базы возбуждения, причем начало одной базы возбуждения совпадает с началом базы наблюдения, а конец другой базы возбуждения совпадает с концом базы наблюдения, при этом расстояние между профилями, располагаемыми по прямоугольной сетке, выбирают по графику зависимости его максимально допустимого значения от величин баз возбуждения и наблюдения, при этом суммирование колебаний по общим точкам дифракции проводят для каждой фиксированной глубины, а полученные суммарные колебания дополнительно суммируют вдоль голографов дифрагированных волн от точек дифракции, трансформируют временную шкалу полученных при этом суммотрасс в шкалу удалений от профиля и устанйвливают местоположение линейных рагируюших объектов по их динамическим изображениям. 2. Способ по п. 1, отличающийся тем, что при использовании непродольных профилей, базы возбуждения располагают на проекции базы наблюдений на соседний профиль. СП ю о сд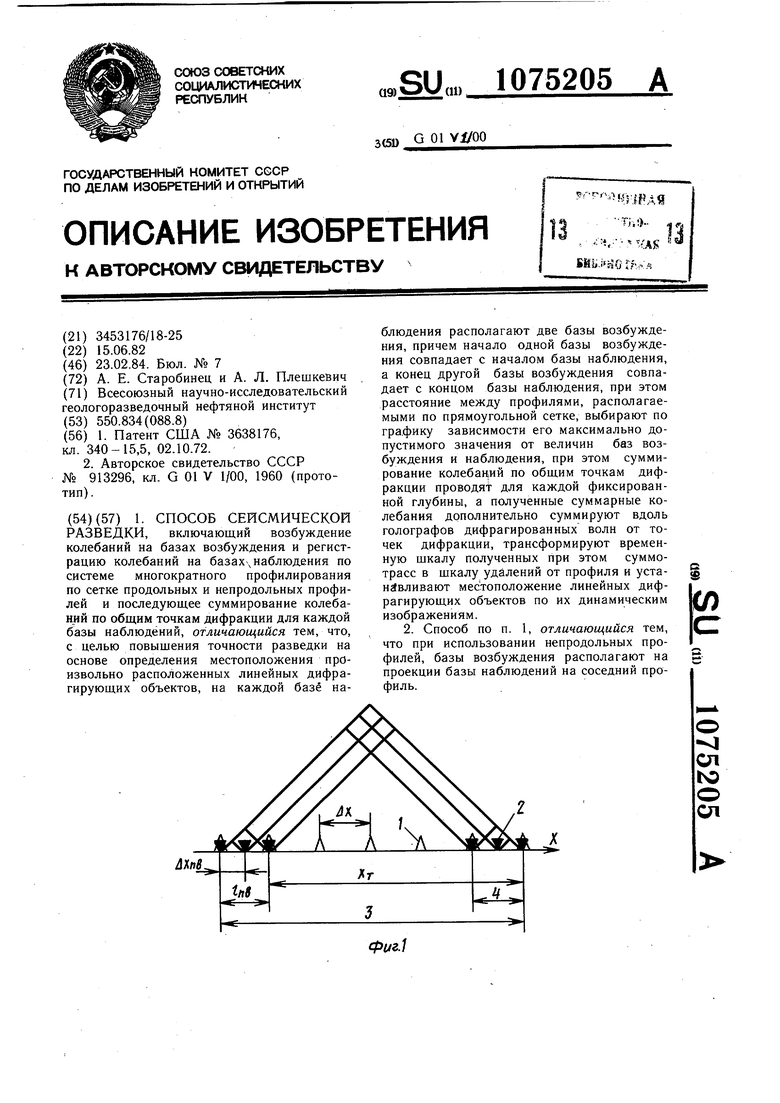
пв
км
о 1
Z 3 Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3638176, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 913296, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
