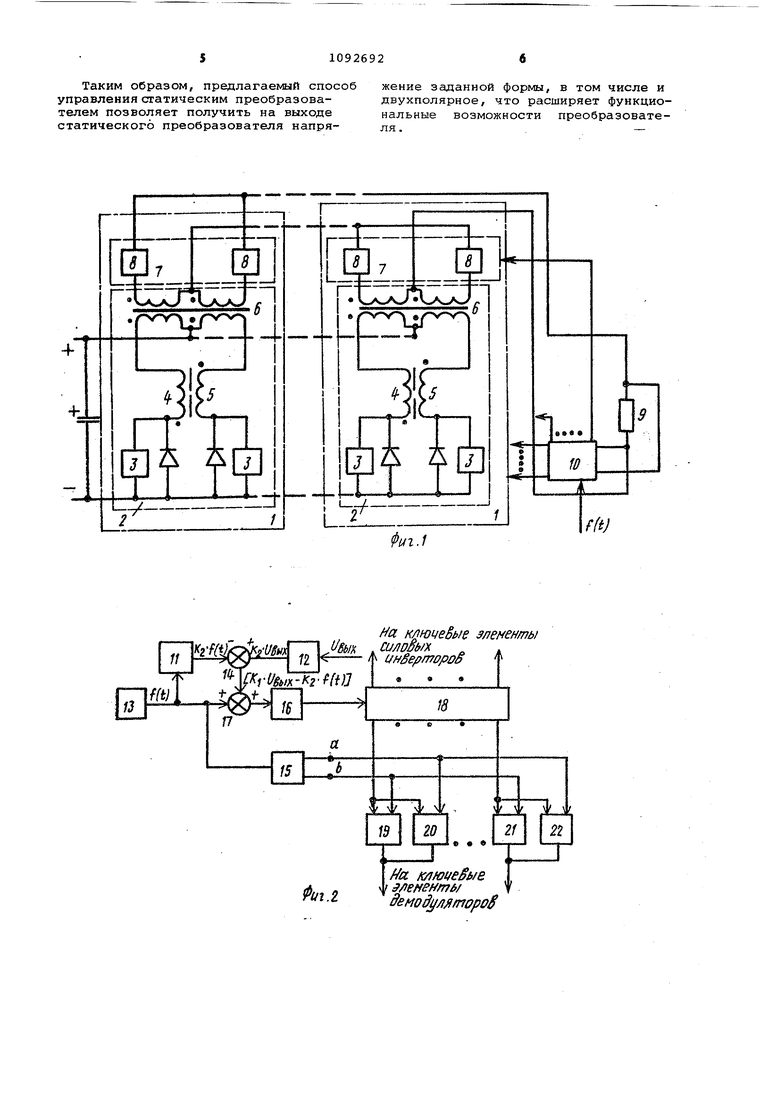
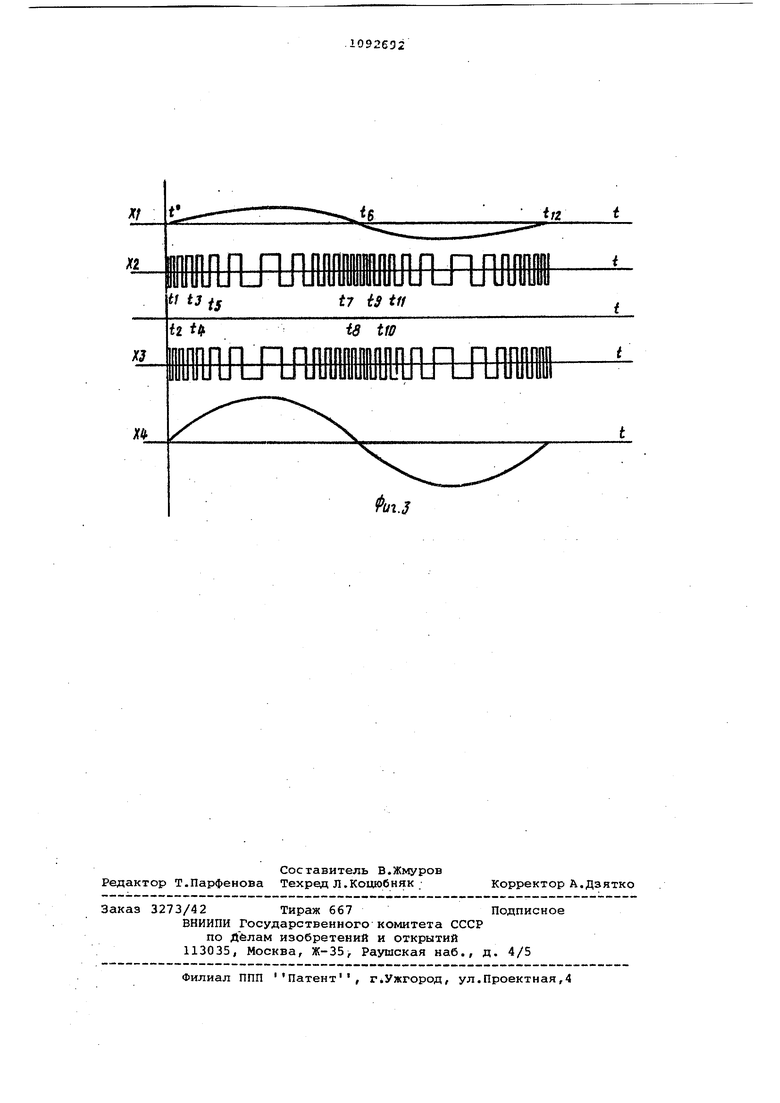
Изобретение относится к электротехнике, а именно к статическим преобразователям постоянного напряжения в переменное синусоидальное и усилителям сигнгшов сложной . Известен способ управления статическим преобразователем, заключающийся в формировании нерегулируемого прямоугольного напряжения повышенной частоты, преобразовании его в ступенчатое напряжение более низкой частоты. Регулиро ание величины выходного напряжения осуществляется путем формирова ния прямоугольного напряжения с регулируемой скважностью и суммированием его с нерегулируемым прямо угольным напряжением повышенной частоты 1. Недостатком данного способа упра ления статическим преобразователем является то, что он не позволяет усиливать сигналы сложной формы и предусматривает применение большого количества ключевых элементов со сложными законами управления, приводшцих к усложнению схемы управления и снижению надежности систе электропитания. При большом диапазо не регулирования величины входного напряжения использование данного способа управления приводит к сущес венному усложнению преобразователя, увеличению амплитуд высших гармонических составляющих выходного напря жения и коэффициента искажения синусоидальности . Наиболее близким по технической сущности к предлагаемому способу яв ляется способ управления статически преобразователем, содержащим m пара лельных ячеек из последовательно соединенных инвертора и демодулятора с управляемыми ключевыми элементами, заключающийся в том, что формируют последовательность импульсов управления, которую распределяют по элементам ячеек, измеряют выходное напряжение преобразователя, из кото рого формируют сигнал обратной связи, формируют задающее напряжение, пропорционешьное задающему сигналу, и формируют сигнал ошибки путем суммирования сигнала обратной связи с задающим напряжением, формируют управляющий сигнал, определяют теку щую амплитуду управляющего сигнала и измеряют частоту следования импульсов управления ключевыми элемен тами ячеек обратно пропорционально амплитуде управляющего сигнала 2. Однако известный yioco6 не преду cмs тpивaeт непосредсйенного получения переменного синусоидального напряжения или в общем случае мощных сигналов сложной . Цель изобретения - расширение функциональных возможностей преобразователя за счет обеспечения усиления сигналов любой сложной формы, в том числе знакопеременных. Поставленная цель достигается тем, что согласно способу управления статическим преобразователем, содержащим г параллельных ячеек из последовательно соединенных инвертора и демодулятора с управляемЕЛМИ ключевыми элементами, заключавяцвму- ся в том, что формируют последовательность импульсов управления, которые распределяют по ключевым элементам ячеек, измеряют выходное напряжение преобразователя, из которого формируют сигнал обратной связи, форглируют задающее напряжение, пропорциональное задающему сигналу, формируют сигнал ошибки путем суммирования сигнала обратной связи с „задающим напряжением, формируют Управляющий сигнал, определяют текущую амплитуду управляющего сигнала и измеряют частоту следования импульсов управления ключевыми элементами обратно пропорционально амплитуде управляющего сигнала, управляющий сигнал формируют путем суммирования сигнала ошибки с задающим сигналом и выделения модуля полученной суммы, сдвигают фазу импульсов управления ключевыми элементами ячеек относительно друг друга на угол JT/m, определяют момент изменения полярности задающего сигнала, и в этот момент изменяют на противоположный порядок распределение импульсов управления по ключевым элементам демодулятора . На фиг. 1 представлена функциональная схема статического преобразователя; на фиг. 2 - устройство реализации способа управления преобразователем; на фиг. 3 - диаграм- мы напряжений на отдельных элементах схемы преобразователя. На диаграмме напряжений (фиг.З) приняты следующие обозначения: XI - задающий сигнал f{t); Х2 - сигнал управления ключевыми элементами инверторов ячеек; ХЗ - сигнал управления ключевыми элементами емодуляторов ячеек; Х4 - выходное напряжение преобразователя. Статический преобразователь содержит m параллельно соединенных ячеек 1, состоящих из инверторов 2, куда входят ключевые элементы 3, обмотки 4 и 5 дросселей, согласующие трансформаторм б инверторов, демодуляторы 7, выполненные на ключевых элементах 8. На выходе преобразователя включена нагрузка 9, Схема управления 10 содержит два усилителя 11 и 12, входы которых подключены соответственно к выходным клеммам преобразователя и к генератору входного задающего сигнала f(t) 13, а выходы - к первому сумма тору 14, формирователь прямоугольных импульсов 15, связанный с генератором входного задающего сигнала 1, управляекый генератор ч-астоты 16, подключенный к выходу второго сумматора 17, входы которого подклю чены к выходу первого сумматора 14 генератору входного задающего сигнс f(t) 13 регистр сдвига 18, входы ко торого подключены к управляемому генератору 16, а выходы - к ключевы элементам 2 и 3 силовых инверторов элементы И 19 - 22, входы которых подключены к формирователю прямоугольных импульсов 15 и регистру сдвига 18, а выходы - к ключевым эл ментам 8 демодуляторов 7. Устройство реализации способа управления статическим преобразова телем работает следующим образом. В нормальном режиме (нагрузка постоянная) управляемый генератор частоты 16 формирует тактовые импульсы, частота которых обратно пропорциональна модулю амплитуды управляющего сигнала (выходного си ала второго сумматора 17), равног f(t) + K UgMx-K2f (t) . Полученные тактовые сигналы поступают на вход регистра сдвига 18, который обеспечивает формирование m прямоугольных напряжений с фазовым сдвигом . Полученные напряжения с выхода регистра.сдвига 18 поступают.на управление ключевыми элементами 3 силовых инверторов 2. Формирователь прямоугольных импульсов 15 предназначен для преобразования выходного задающего сигнала f(t) в прямоуголь ное, фаза которого совпадает с фазой сигнала f (t) , т.е. на одном .выходе формируется.сигнал ( 1 ) в интервале времени , t -t и т.д. (фиг.З), а на другом выходе в интервале времени tg-t -,2 и т.д. В случае однополярного згщакяцего сигнала f(t) сигнал будет только на одном (Ь) выходе формирователя 15, Импульсы управления на ключевые элементы демодулятора подаются с выходов схем И 19-22. На схемы И 19-22 поступают сигналы вида Х2 (фиг.З) (они поступают i: на управле ние ключевых элементов 2) и прямоугольные сигналы с выхода формирователя 15. При этом с выходов схем 19-21 обеспечивается последовательность поступления сигналов управления в интервале времени to -t и т.д. (на выходах .схем 20-22 сигналов нет) на ключевые элементы 8. В интервале времени т.д. на выходе b формирователя прямоугольных сигналов 15 сигнала () нет. В это время сигнал присутствует только на выходе а и от схем И 19-22 начинает поступать сигнал на управление ключевыми элементами 8, но в другой последовательности, что обеспечивает изменение полярности напряжения на нагрузке 9. Усилители 11 и 12 с трансформаторными выходами обеспечивают формирование, сигнсшов, пропорциональных соответственно з.адающему f(t) .(отличается по амплитуде в К раз) и выходному и gj, (сигнал обратной связи отличается в KT раз). Полученные сигналы вычитаются, и полученный сигнал ошибки (К и,, -К f(t) ), суммируется с задающим сигналом f(t). Полученный управляющий сигнал f (t)-f + g{,,-K2 f (t) поступает на задающий генератор 16, где он выпрямляется и определяет частоту тактовых импульсов задающего генератора 16. При полном соответствии выходного напряжения И, задающему сигналу f(t) на выходе первого сумматора 14 сигнал ошибки K.Ug(,,x Kj f(t) равен нулю, и частота тактовых сигналов определяется только задающим сигналом f(t). При набросе нагрузки наблюдается провал амплитуды выходного напряжения Ищ , что приводит к появлению сигнала ошибки ,- -К2 f(t) отрицательного знака, которое, суммируясь с сигналом f(t), обеспечивает уменьшение частоты тактовых импульсов, т.е. к исключению очередных (по отношению к статическому режиму) коммутацией ключевых элементов инверторов и демодуляторов. Такое управление обеспечивает минимально возможный провал напряжения вых нагрузке 9 .. Длительность времени, в течение которого исключена коммутация ключевых элементов инвертора и демодуляторов, определяется значениями коэффициентов К и К. При сбросе нагрузки наблюдается увеличение амплитуды выходного напряжения И вых приводит к появлению сигнала ошибки ,,-Kjf(t) с положительным знаком, который в сумме с задающим сигналом f(t) обеспечивает резкое увеличение частоты тактовых сигналов задающего генератора 15. Резкое повышение частоты тактовых сигналов задающего генератора 17 приводит практически к мгновенной коммутаций ключевых элементов нескольких инверторов с демодуляторами, что и обеспечивает резкое уменьшение амплитуды выходного напряжения Ug, . Таким образом осуществляется стабилизация формы выходного напряжения как в динамических, так и в статических режимах. В статических режимах работы преобразователя стабилизация формы напряжения (при колебаниях величины напряжения питания) осуществляется аналогичным образом.
Таким образом, предлагаемый способ управления статическим преобразователем позволяет получить на выходе статического преобразователя напряжение заданной формы, в том числе и двухполярное, что расширяет функциональные возможности преобразователя .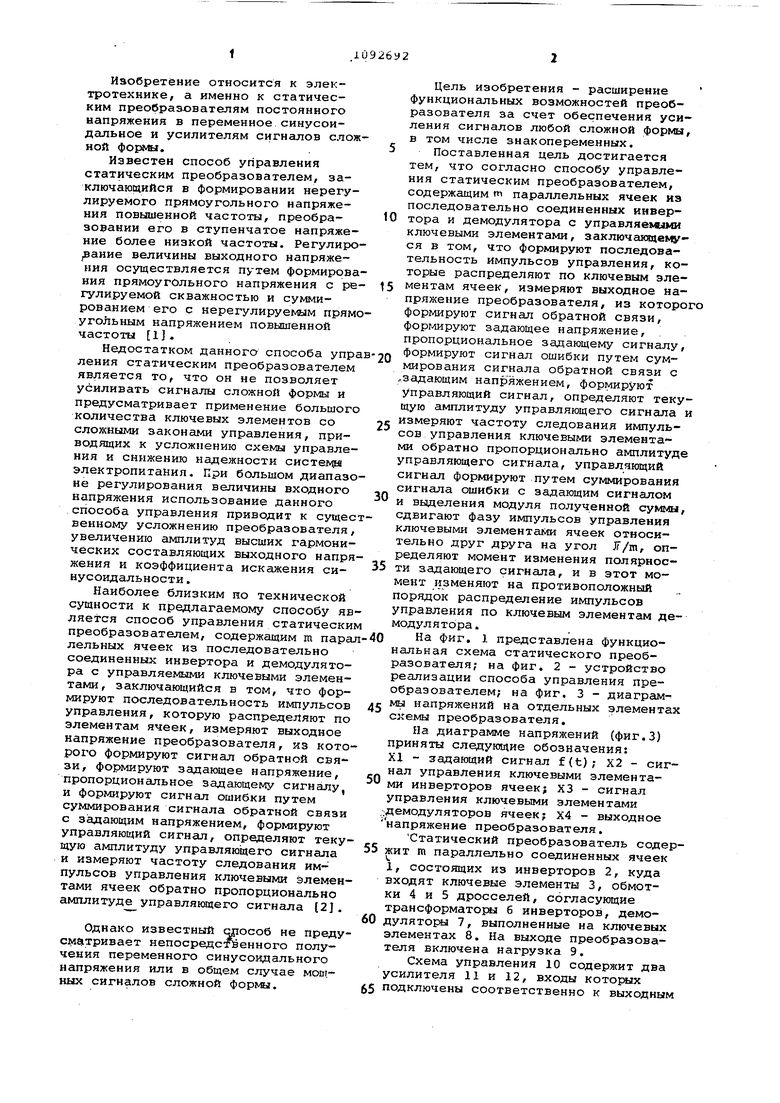

СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ, содержащим m параллельных ячеек из последовательно соединенных инвертора и демодулятора с управляемыми ключевыми. элемента1ми, заключаийцийся в том, что формируют последовательность импульсов управления, которые распределяют по ключевым элементам ячеек, нз меряют выходное напряжение преобразователя, из которого формируют сигнал обратной связи, формируют задающее напряжение, пропорциональное задающему сигналу, формируют сигнал ошибки путем суммирования сигнала обратной связи с задакщим напряжением, формируют управляющий сигнал, определяют текущую амплитуду управляющего сигнала и измеряют частоту следования импульсов управления ключевыми элементами обратно пропорционально амплитуде управляющего сигнала, отличающийся тем, что, с целью расширения функциональных возможностей путем использования знакопеременного задающего сигнала, управляющий сигнал формируют путем суммирования сигнала скнибки с задающим сигналом и вы(П деления модуля полученной суммы, сдвигают фазу импульсов управления ключевыми элементами ячеек относительно друг друга на угол 1Г/т, определяют момент изменения полярности задающего сигнала и в этот момент изменяют на противоположный о х порядок распределения импульсов управления по ключевым элементам демодулятора. N5 СО o
1 t3 ts
t7 is tit
X
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стабилизированный преобразователь постоянного напряжения в переменное многоступенчатой формы | 1978 |
|
SU752694A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| . | |||
