Известные устройства для определения расстояний между гнездами при посадке с применением мерной проволоки не обеспечивают достаточной точности посадки и требуют большое число обслуживающего персонала.
Особенностью предлагаемого радиодистанционного способа является управление посадочными аппаратами, основанное на измерении разности фаз непрерывных высокочастотных синусоидальных колебаний, выходящих с передатчика и входящих в приемник после отражения от специального отражателя, установленного на посадочной машине; при разности фаз ждущий передатчик посылает исполнительные колебания для включения исполнительного механизма посадочного устройства.
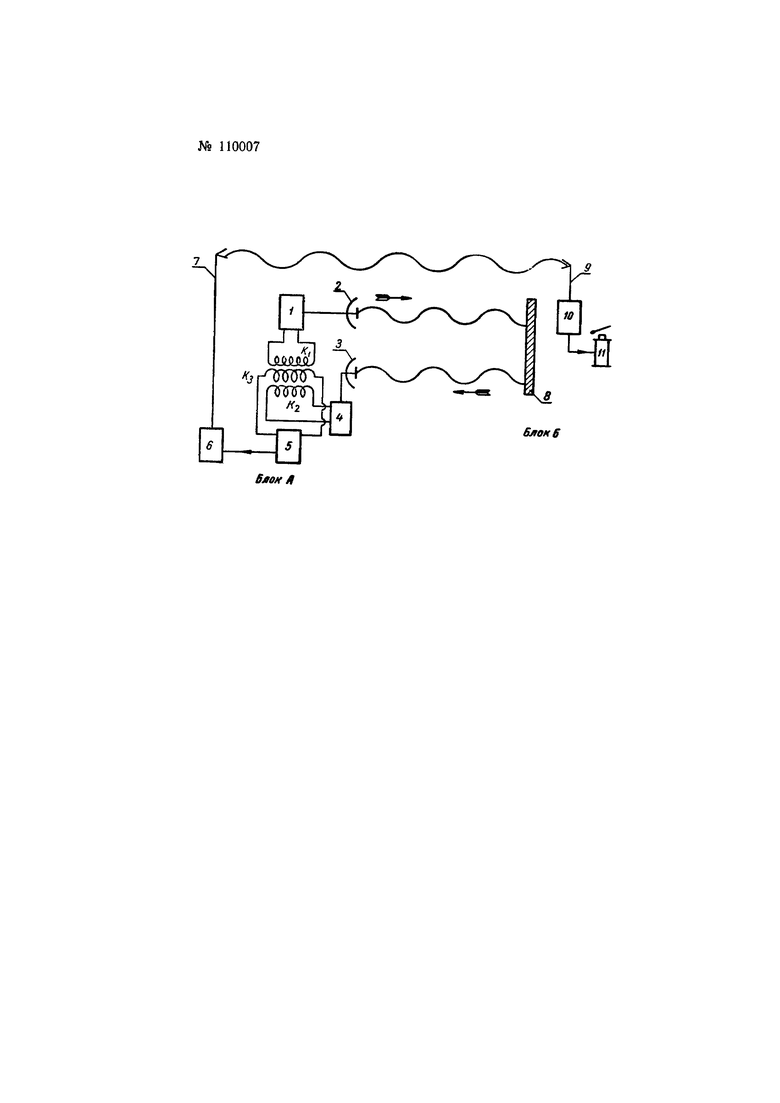
Предлагаемый радиодистанционный способ схематически изображен на чертеже.
Блок А устанавливается на некотором расстоянии от посадочного поля, а блок Б на посадочной машине.
Блок А включает передатчик 1, представляющий собой задающий генератор непрерывных немодулированных синусоидальных колебаний высокой частоты; направленную передающую антенну 2; суммирующее устройство, состоящее из катушек K1, K2 и K3; приемную антенну 3; приемник 4; устройство запуска 5; ждущий передатчик 6 и антенну 7 ждущего передатчика. Длина волны передатчика 1 принимается, равной 2а, где а - расстояние между гнездами посадки. Частота f2 ждущего генератора 6 задается много меньше частоты f1 передатчика 1.
Блок Б состоит из отражателя радиоволн 8, антенны 9, приемника 10, настроенного на прием частоты ждущего передатчика 6, и исполнительного механизма 11.
Работа блока А и блока Б состоит в следующем.
Высокочастотные колебания передатчика 1 через антенну 2 посылаются на отражатель 8 и одновременно колебания постоянной амплитуды U1 подаются на катушку K1 суммирующего устройства. Отраженные от отражателя 8 радиоволны передатчика 1 принимаются антенной 3, и с выхода приемника 4 синусоидальные колебания постоянной амплитуды U2-U1 частоты f1 поступают на катушку K2 суммирующего устройства.
В суммирующем устройстве происходит алгебраическое сложение мгновенных амплитуд напряжений, поступающих на катушку K1 со стороны передатчика 1 и на катушку K2 со стороны приемника 4. С катушки K3 результирующее напряжение подается на устройство 5 пуска ждущего передатчика 6.
Ждущий передатчик 6 имеет частоту f2<<f1 и служит для управления исполнительным механизмом блока Б. Ждущий передатчик 6 включается и выключается устройством 5. Устройство 5 включает ждущий передатчик 6 при разности фаз между напряжениями U1 и U2 на катушках K1 и K2 отличной от 180° на 5° и менее и выключает его при разности указанных фаз отличных от 180° на величину более 5°. Колебания частоты f2 ждущего передатчика 6 при работе последнего принимаются антенной 9 и усиленные в приемнике 10 приводят к срабатыванию исполнительного механизма 11.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДУЛЯЦИИ ПАРАМЕТРОВ СИГНАЛА | 2023 |
|
RU2822443C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОВМЕЩЕНИЯ ПРОДОЛЬНОЙ ОСИ ЛЕТАТЕЛЬНОГО АППАРАТА С ОСЬЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2584975C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1991 |
|
RU2037839C1 |
| ПРИЁМНОЕ УСТРОЙСТВО ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСИСТЕМЫ | 2022 |
|
RU2827301C2 |
| Способ измерения угла места маловысотной цели и устройство для его осуществления | 2020 |
|
RU2752235C1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ТРАНСЛЯЦИИ УГЛА ПОВОРОТА ВАЛА | 2006 |
|
RU2319214C1 |
| СПОСОБ СОЗДАНИЯ НЕМОДУЛИРОВАННЫХ АКТИВНЫХ ПОМЕХ ДЛЯ ПОДАВЛЕНИЯ МОБИЛЬНОЙ СВЯЗИ ВНУТРИ ЗДАНИЯ | 2005 |
|
RU2292651C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА СИГНАЛОВ РАДИОСТАНЦИИ | 2005 |
|
RU2292641C2 |
| СПОСОБ ВЫДЕЛЕНИЯ СИГНАЛОВ ДИФФЕРЕНЦИАЛЬНОГО ДАТЧИКА | 1998 |
|
RU2153650C2 |
Радиодистанционный способ управления посадочными устройствами сеялок и сажалок при квадратно-гнездовом посеве, отличающийся тем, что, с целью повышения точности образования квадратов, управление основано на измерении разности фаз непрерывных высокочастотных синусоидальных колебаний, выходящих с передатчика и входящих в приемник после отражения от специального отражателя, установленного на посадочной машине, при разности указанных фаз ждущий передатчик посылает исполнительные колебания для включения исполнительного механизма посадочного устройства.
