2. Устройство по п. 1, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено дополнительным магнитом и двумя герконами, взаимодействующими с ферромагнитнымиэлементами, расположенными на поверхности, относительно которой перемещается объект, параллельно ферромагнитной направлякнцей, при этом угол между нейтральной плоскостью дополнительного магнита и нейтральной плоскостью основного магнита составляет 90° причем дополнительный магнит смещ.ен относительно ферромагнитной направляющей на расстояние
ijo
Ol(t-d--n),,
шаг между дополнительными ферромагнитными элементами; расстояние от нейтральной плоскости магнита до внешнего по отношению к ферромагнитной направляющей вывода геркона;
расстояние от осевой линии ферромагнитной направляющей до нейтральной плоскости магнита
ширина ферромагнитного элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Коммутационное устройство на герконах | 1991 |
|
SU1820959A3 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Выключатель | 1982 |
|
SU1050001A1 |
| СТЕНД ДЛЯ УСКОРЕННЫХ ИМИТАЦИОННЫХ ИСПЫТАНИЙ ХОДОВЫХ ЧАСТЕЙ КОЛЕСНЫХ МАШИН | 1991 |
|
RU2019806C1 |
| СТЕНД ДЛЯ УСКОРЕНИЯ ИМИТАЦИОННЫХ ИСПЫТАНИЙ ХОДОВЫХ ЧАСТЕЙ КОЛЕСНЫХ МАШИН | 1990 |
|
RU2022930C1 |
| Устройство для копирования свекловичных головок и дообрезки ботвы | 1989 |
|
SU1711705A1 |
| Многопозиционный путевой переключатель | 1980 |
|
SU955269A1 |
| ВЫКЛЮЧАТЕЛЬ КОНЦЕВОЙ ГЕРКОНОВОЙ ПРЕЦИЗИОННЫЙ | 2006 |
|
RU2307418C1 |
| ПУТЕВОЙ ВЫКЛЮЧАТЕЛЬ | 1991 |
|
RU1795810C |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОБРАБОТКИ ДОРОЖНОГО ПОКРЫТИЯ ПРОТИВОГОЛОЛЕДНЫМ ВЕЩЕСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576123C1 |
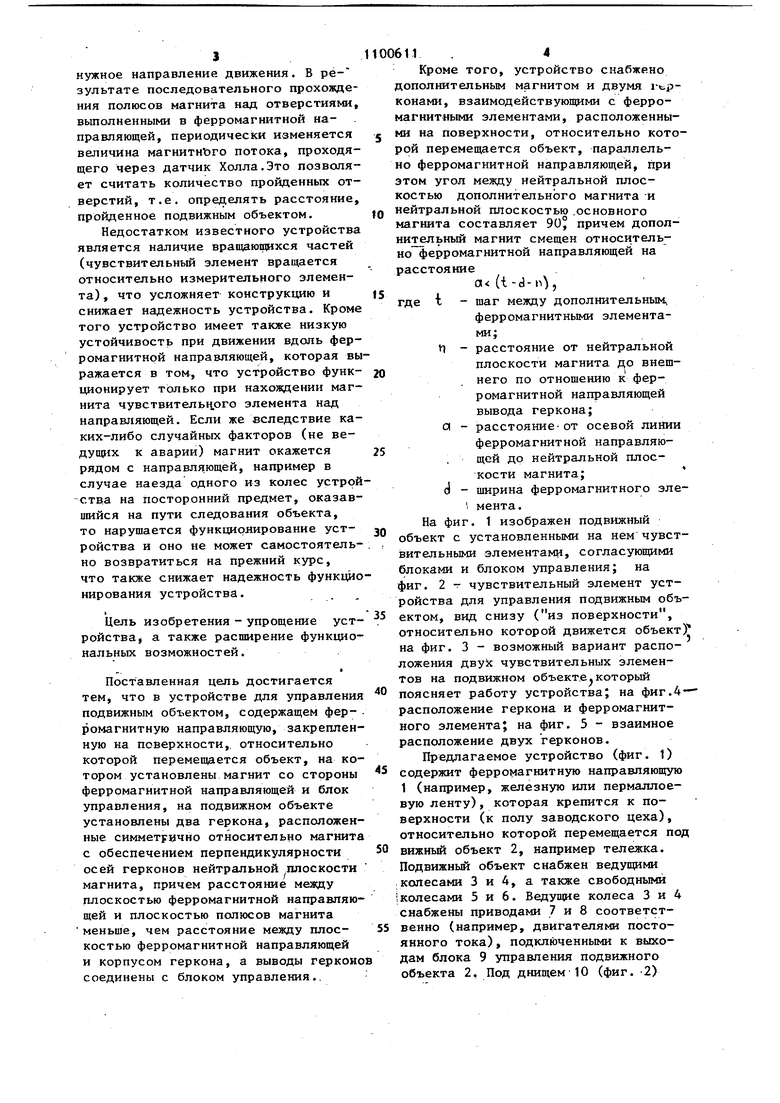
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ, содержащее ферромагнитную направляющую, закрепленную на поверхносфи, относительно HanpaintHue fftWHtHUff которой перемещается объект, на котором установлены магнит со стороны ферромагнитной направляющей и блок управления, отличающееся тем, что, с целью упрощения устройства, на подвижном объекте установлены два геркона, расположенные симметрично относительно магнита с обеспечением перпендикулярности осей герконов нейтральной плоскости магнита, причем расстояние между плоскостью ферромагнитной направляющей и плоскостью полюсов магнита меньше, чем расстояние между штоскостью ферромагнитной направляющей и корпусом геркона, а выводы герконов соединены с блоком управления. (Л 4J ж Vut f
1
Изобретение относится к системам автоматического управления подвижными объектами и может быть использовано в качество измерительного органа автоматизированной системы вождения напольного транспорта.
Известно устройство для управления подвижным объектом, содержащее раму на которой смонтированы ведущие колеса, расположенные посередине рамы, и передние и задние управляемые колеса. На переднем и заднем кронштейнах paMfci размещены в ряд перпендикулярно направлению движения чувствительные элементы (фотоэлементы). взаимодействующие с направляющим элементом (отражающей лентой). Чувствительные элементы через согласуюш;ий блок (детектор, определяющий требуемый угол поворота колес) и генератор команд, формирующий командное напряжение для установки необходимого угла поворота колес в соответствии с выходными сигналами чувствительных элементов, подключены к первому входу блока управления, а к второму входу блока управления присоединен задающий потенциометр. Выход блока управления присоединен к приводам (электродвигателям) уп - равляемых колес flj.
Недостатками данного устройства являются низкая помехозащищенность
чувствительных элемен1;ов от световых (или инфракрасных) посторонних воздействий, которые могут возникнуть при движении тележки по маршруту, а также сложность устройства, заключающаяся в наличии специальных двигателей, обеспечивающих поворот тележки.
Наиболее близким по технической сущности к предлагаемому является устройство для управления подвижным объектом, содержащее ферромагнитную направляющую, измерительный элемент, установленный на управляемом валу подвижного объекта, а на валу измерительного элемента укреплен рычаг с электромагнитом, полюса которого расположены против ферромагнитной направляющей, причем направляющая вьтолнена с отверстиями, а на одном полюсе электромагнита установлен дополнительно введенный в устройство датчик Холла 2.
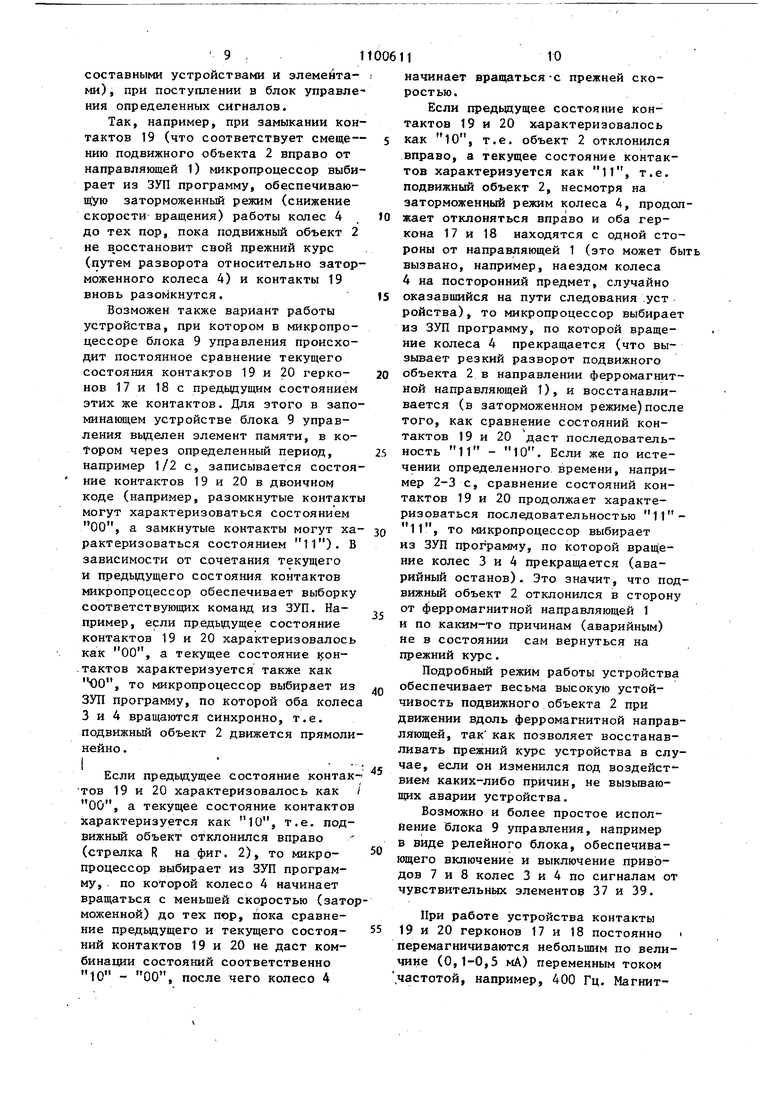
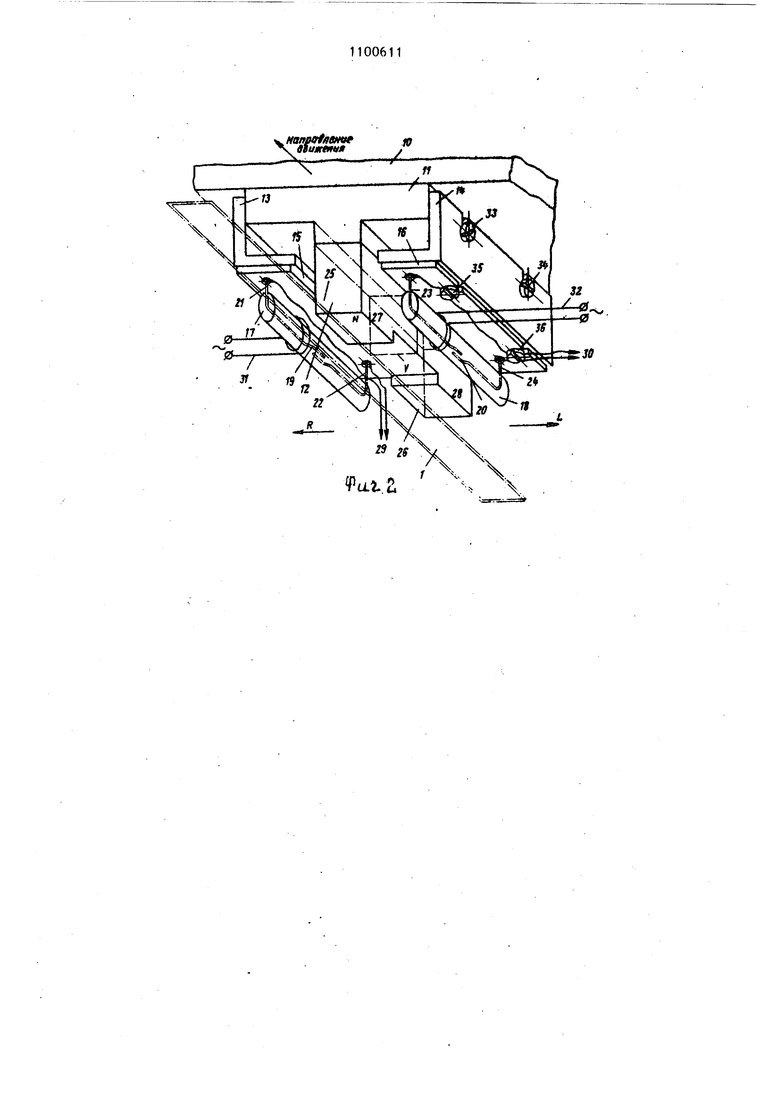
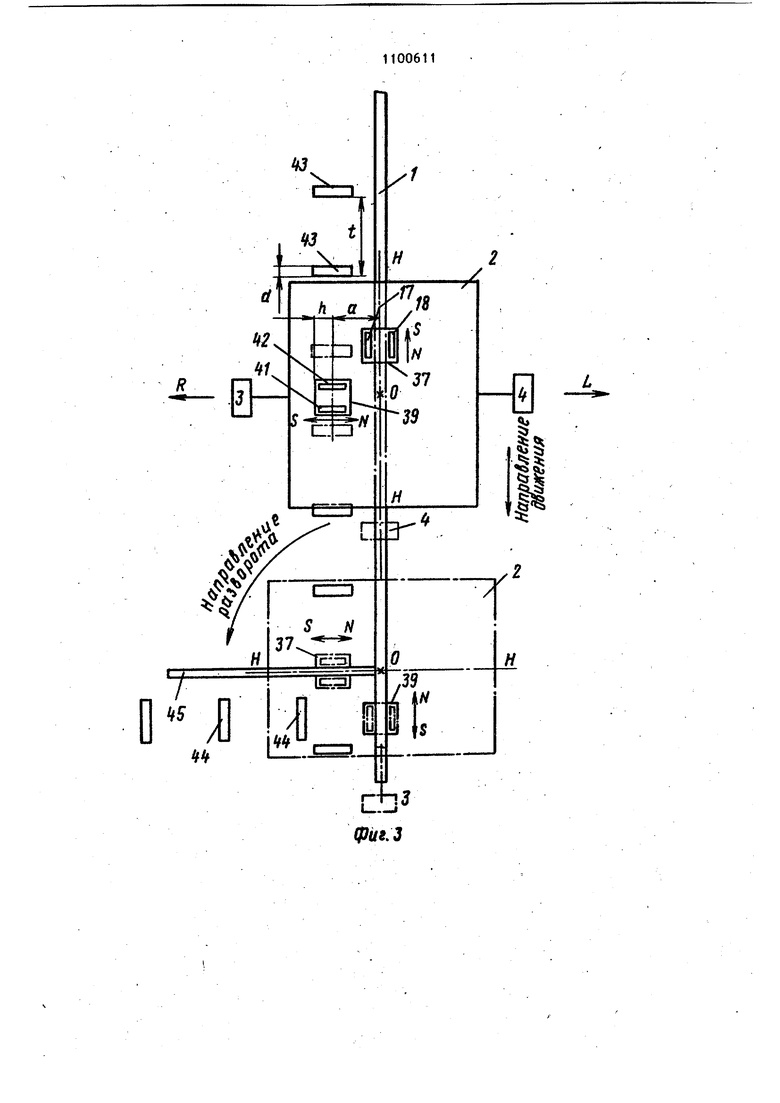
В данном устройстве положение ферромагнитной направляющей отслеживается магнитом, при этом, если подвижный объект отклоняется от заданного курса, то с измерительноiго элемента в блок управления посту пает сигнал рассогласования, обеспечивающий отработку соответствую- щего колеса подвижного объекта, в результате чего восстанавливается нужное направление движения. В результате последовательного прохождения полюсов магнита над отверстиями, выполненными в ферромагнитной направляющей, периодически изменяется величина магнитнЪго потока, проходящего через датчик Холла.Это позволяет считать количество пройденных отверстий, т.е. определять расстояние, пройденное подвижным объектом. Недостатком известного устройства является наличие вращающихся частей (чувствительный элемент вращается относительно измерительного элемента), что усложняет конструкцию и снижает надежность устройства. Кроме того устройство имеет также низкую устойчивость при движении вдоль ферромагнитной направляющей, которая вы ражается в том, что устройство функционирует только при нахождении магнита чувствителы рго элемента над направляющей. Если же вследствие каких-либо случайных факторов (не ведущих к аварии) магнит окажется рядом с направляющей, например в случае наезда одного из колес устрой ства на посторонний предмет, оказавшийся на пути следования объекта, то нарушается функционирование устройства и оно не может самостоятельно возвратиться на прежний курс, что также снижает надежность функдао нирования устройства. Цель изобретения - упрощение устройства, а также расширение функциональных возможностей. Поставленная цель достигается тем, что в устройстве для управления подвижным объектом, содержащем ферромагнитную направляющую, закрепленную на поверхности,, относительно которой перемещается объект, на котором установлены магнит со стороны ферромагнитной направляющей и блок управления, на подвижном объекте установлены два геркона, расположенные симметрично относительно магнита с обеспечением перпендикулярности осей герконов нейтральной плоскости магнита, причем расстояние между плоскостью ферромагнитной направляющей и плоскостью полюсов магнита меньше, чем расстояние между плоскостью ферромагнитной направляющей и корпусом геркона, а выводы герконо соединены с блоком управления.. Кроме того, устройство снабжено дополнительным магнитом и двумя i-ърконами, взаимодействующими с ферромагнитными элементами, расположенными на поверхности, относительно которой перемещается объект, параллельно ферромагнитной направляющей, при этом угол между нейтральной плоскостью дополнительного магнита и нейтральной плоскостью .основного магнита составляет 90° причем дополнительный магнит смещен относительно ферромагнитной направляющей на расстояние а (t -d-n, где t - шаг между дополнительным, ферромагнитными элементами;VI - расстояние от нейтральной плоскости магнита до внешнего по отношению к ферромагнитной направляющей вывода геркона; О - расстояние-от осевой линии ферромагнитной направляющей до нейтральной плоскости магнита; d - ширина ферромагнитного эле мента. На фиг. 1 изображен подвижный объект с установленными на нем чувствительными элементами, согласующими блоками и блоком управления; на фиг. 2 - чувствительный элемент устройства для управления подвижным объектом, вид снизу (из поверхности, относительно которой движется объект) на фиг. 3 - возможный вариант расположения двух чувствительных элементов на подвижном объекте.который поясняет работу устройства на фиг.4 расположение геркона и ферромагнитного элемента; на фиг. 5 - взаимное расположение двух герконов. Предлагаемое устройство (фиг. 1) содержит ферромагнитную направляющую 1 (например, железную или пермаллоевую ленту), которая крепится к поверхности (к полу заводского цеха), относительно которой перемещается под важный объект 2, например тележка. Подвижный объект снабжен ведущими колесами 3 и 4, а также свободными колесами 5 и 6. Ведущие колеса 3 и 4 снабжены приводами 7 и 8 соответственно (например, двигателями постоянного тока), подключенными к выходам блока 9 управления подвижного объекта 2, Под днищемЮ (фиг. -2)
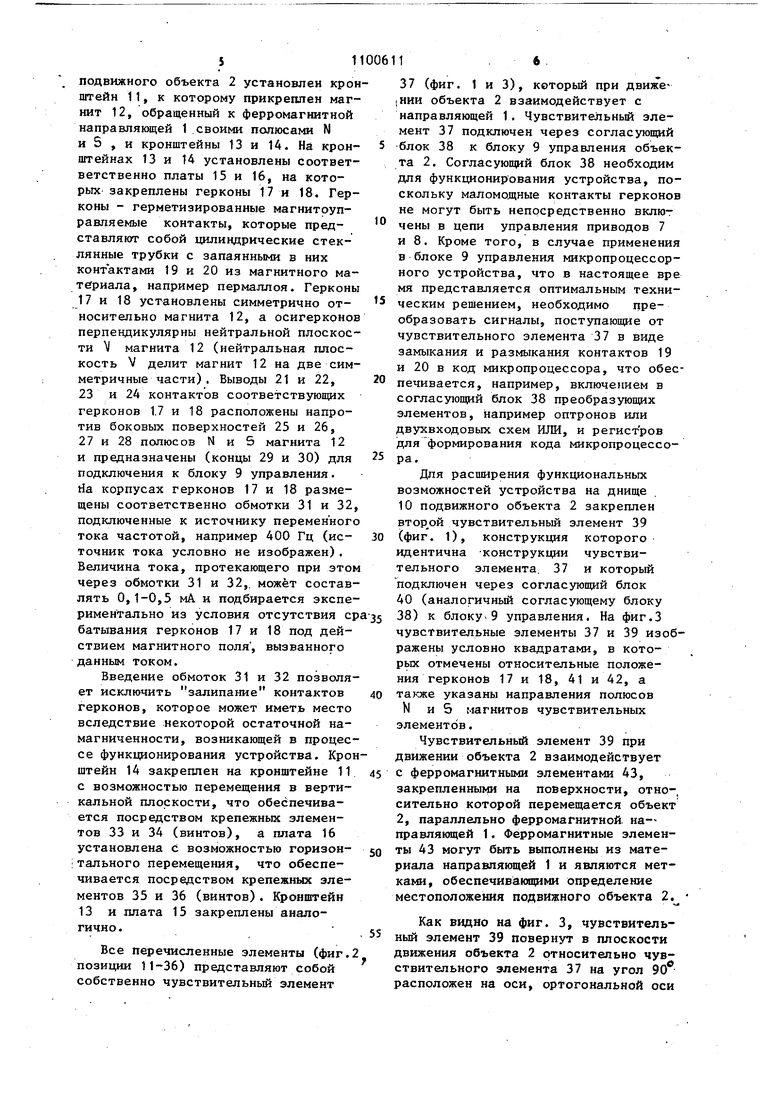
подвижного объекта 2 установлен кронштейн 11, к которому прикреплен магнит 12, обращенный к ферромагнитной направляющей 1 своими полюсами N и 5 , и кронштейны 13 и 14. На кронштейнах 13 и 14 установлены соответветственно платы 15 и 16, на которых закреплены герконы 17 и 18, Герконы - герметизированные магнитруправляемые контакты, которые представляют собой цилиндрические стеклянные трубки с запаянными в них контактами 19 и 20 из магнитного материала, например пермаллоя. Герконы 17 и 18 установлены симметрично относительно магнита 12, а осигеркрнов перпендикулярны нейтральной плоскости V магнита 12 (нейтральная плоскость V делит магнит 12 на две симметричные части) . Выводы 21 и 22, 23 и 24 контактов соответствующих герконов 1.7 и 18 расположены напротив боковых поверхностей 25 и 26, 27 и 28 полюсов N и 5 магнита 12 и предназначены (концы 29 и 30) для подключения к блоку 9 управления. На корпусах герконов 17 и 18 размещены соответственно обмотки 31 и 32, подключенные к источнику переменного тока частотой, например 400 Гц (источник тока условно не изображен), Величина тока, протекающего при этом через обмотки 31 и 32,. может составлять 0,1-0,5 мА и подбирается экспериментально из условия отсутствия ср батывания герконов 17 и 18 под действием магнитного поля, вызванного данным током.
Введение обмоток 31 и 32 позволяет исключить залипание контактов герконов, которое может иметь место вследствие некоторой остаточной намагниченности, возникающей в процессе функционирования устройства. Кронштейн 14 закреплен на кронштейне 11 с возможностью перемещения в вертикальной плоскости, что обеспечивается посредством крепежных элементов 33 и 34 (винтов), а плата 16 установлена с возможностью горизон тального перемещения, что обеспечивается посредством крепежных элементов 35 и 36 (винтов). Кронштейн 13 и плата 15 закреплены аналогично.
Все перечисленные элементы (фиг.2 позиции 11-36) представляют собой собственно чувствительный элемент
37 (фиг. 1 и 3), который при движе .НИИ объекта 2 взаимодействует с направляющей 1. Чувствительный элемент 37 подключен через согласующий блок 38 к блоку 9 управления объекта 2. Согласующий блок 38 необходим для функционирования устройства, поскольку маломодные контакты герконов не могут быть непосредственно вклют чены в цепи управления приводов 7 и 8. Кроме того, в случае применения в блоке 9 управления микропроцессорного устройства, что в настоящее вре мя представляется оптимальным техническим решением, необходимо преобразовать сигналы, поступающие от чувствительного элемента 37 в виде замыкания и размыкания контактов 19 и 20 в код микропроцессора, что обеспечивается, например, включением в согласующий блок 38 преобразующих элементов, например оптронов или двухвходовых схем ИЛИ, и регистров для формирования кода микропроцессора.
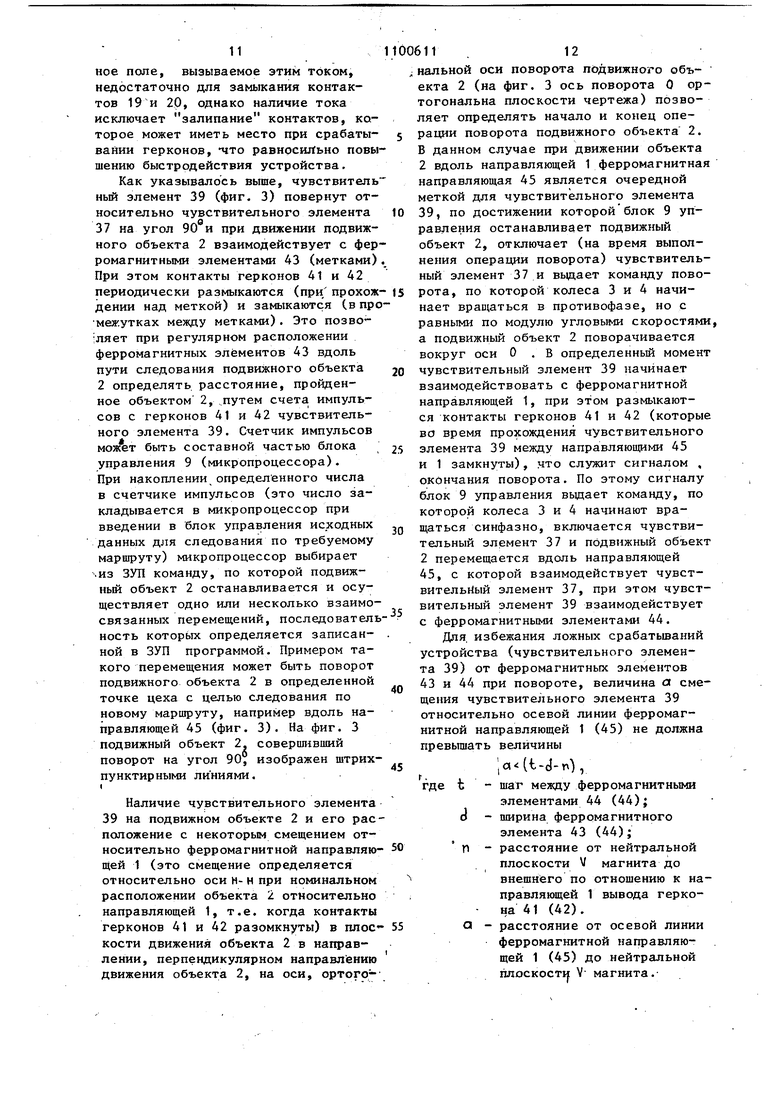
Для расширения функциональных возможностей устройства на днище 10 подвижного объекта 2 закреплен чувствительный элемент 39 (фиг. 1), конструкция которого идентична -конструкции чувствительного элемента. 37 и который подключен через согласующий блок 40 (аналогичный согласующему блоку 38) к блоку 9 управления. На фиг.З чувствительные элементы 37 и 39 изображены условно квадратами, в которь1х отмечены относительные положения герконов 17 и 18, 41 и 42, а также указаны направления полюсов N и 5 магнитов чувствительных элементов.
Чувствительный элемент 39 при движении объекта 2 взаимодействует с ферромагнитными элементами 43, закрепленными на поверхности, относительно которой перемещается объект 2, параллельно ферромагнитной, на- правлякщей 1. Ферромагнитные элементы 43 могут быть выполнены из материала направляющей 1 и являются метками, обеспечивающими определение местоположения подвижного объекта 2.
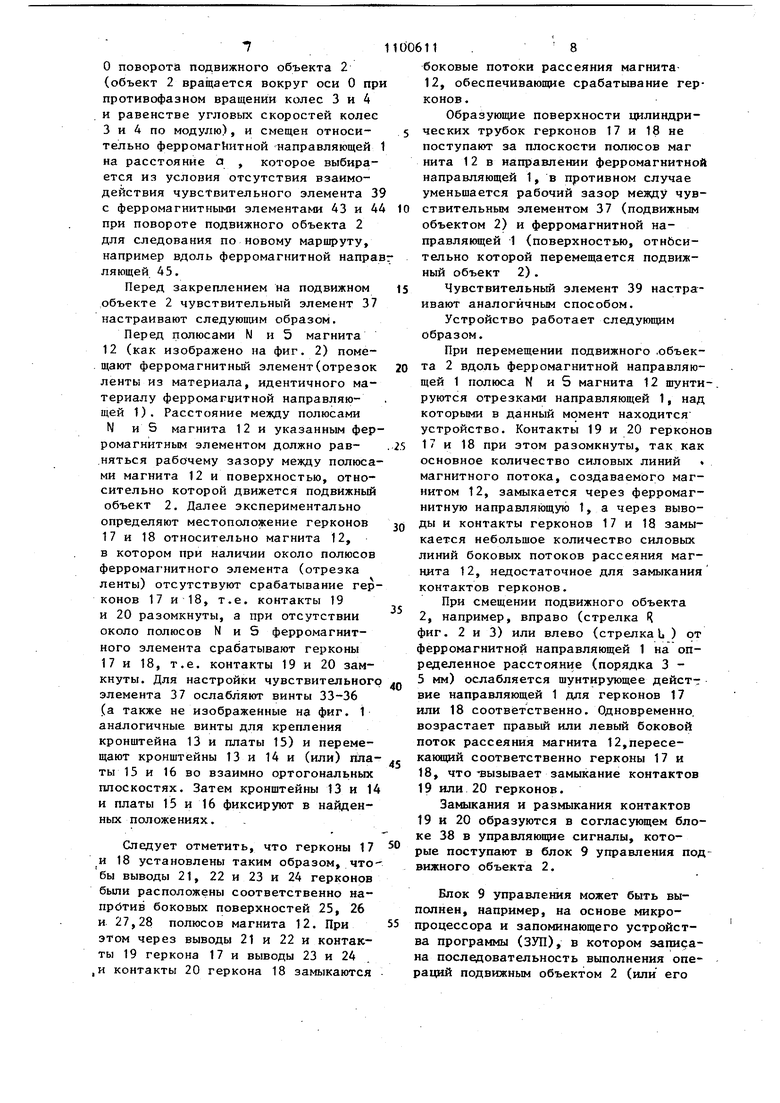
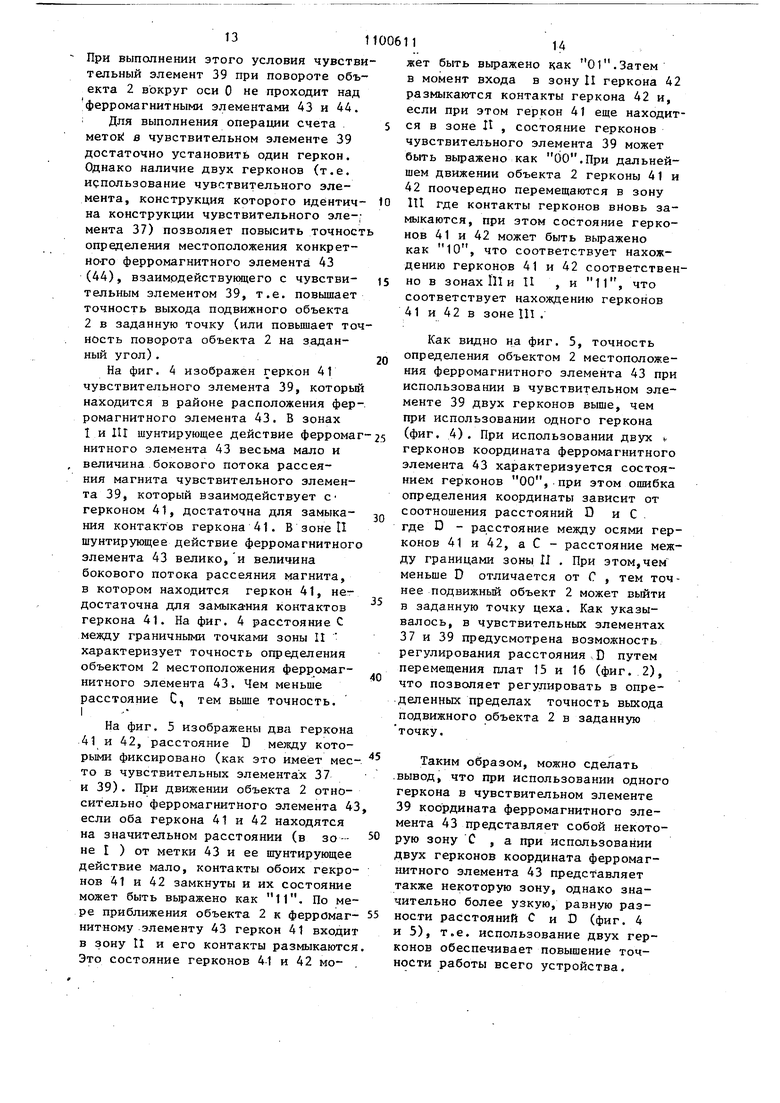
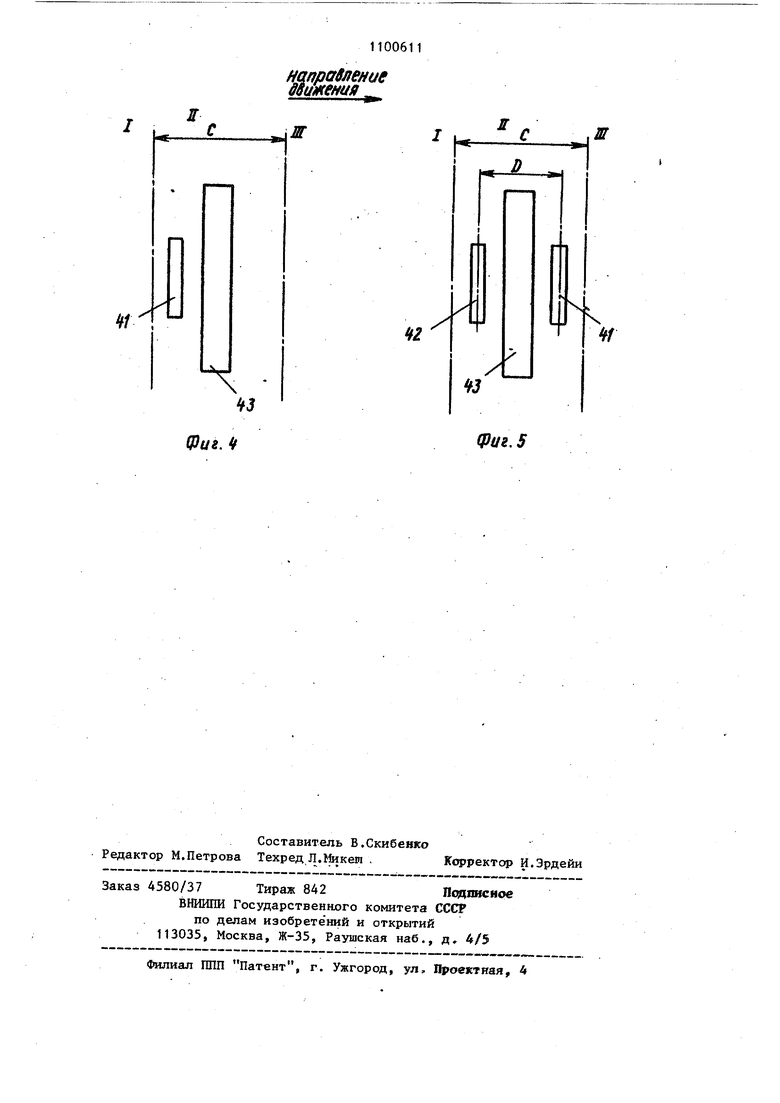
Как видно на фиг. 3, чувствительный элемент 39 повернут в плоскости движения объекта 2 относительно чувствительного элемента 37 на угол 90 расположен на оси, ортогональной оси 7 О поворота подвижного объекта 2 (объект 2 вращается вокруг оси О пр противофазном вращении колес 3 и 4 и равенстве угловых скоростей колес 3 и 4 по модулю), и c 5eщeн относительно ферромагнитной направляющей на расстояние а , которое выбирается из условия отсутствия взаимодействия чувствительного элемента 3 с ферромагнитными элементами 43 и 4 при повороте подвижного объекта 2 для следования по новому маршруту, например вдоль ферромагнитной напра ляющей 45. Перед эакреплением на подвижном .объекте 2 чувствительный элемент 37 настраивают следуюп1им образом. Перед полюсами N и 5 магнита 12 (как изображено на фиг. 2) поме. щают ферромагнитный элемент(отрезок ленты из материала, идентичного материалу ферромагыитной направляющей 1). Расстояние между полюсами N и S магнита 12 и указанным фер ромагнитным элементом должно рав.няться рабочему зазору между полюса ми магнита 12 и поверхностью, относительно которой движется подвижный объект 2. Далее экспериментально определяют местоположение герконов 17 и 18 относительно магнита 12, в котором при наличии около полюсов ферромагнитного элемента (отрезка ленты) отсутствуют срабатывание гер конов 17 и 18, т.е. контакты 19 и 20 разомкнуты, а при отсутствии около полюсов N и 5 ферромагнитного элемента срабатывают герконы 17 и 18, т.е. контакты 19 и 20 замкнуты. Для настройки чувствительног элемента 37 ослабляют винты 33-36 (а также не изображенные на фиг. 1 аналогичные винты для крепления кронштейна 13 и платы 15) и перемещают кронштейны 13 и 14 и (или) пла ты 15 и 16 во взаимно ортогональных плоскостях. Затем кронштейны 13 и 1 и платы 15 и 16 фиксируют в найденных положениях. Следует отметить, что герконы 17 и 18 установлены таким образом, что бы выводы 21, 22 и 23 и 24 герконов были расположены соответственно напрбтив боковых поверхностей 25, 26 и 27,28 полюсов магнита 12. При этом через выводы 21 и 22 и контакты 19 геркона 17 и выводы 23 и 24 ,и контакты 20 геркона 18 замыкаются 11 . 8 боковые потоки рассеяния магнита 12, обеспечивающие срабатывание герконов . Образующие поверхности цилиндрических трубок герконов 17 и 18 не поступают за плоскости полюсов маг нита 12 в направлении ферромагнитной направляющей 1, в противном случае уменьшается рабочий зазор между чувствительным элементом 37 (подвижным объектом 2) и ферромагнитной направляющей 1 (поверхностью, отнбсительно которой перемещается подвижный объект 2). Чувствительный элемент 39 настраивают аналогичным способом. Устройство работает следующим образом. При перемещении подвижного .объекта 2 вдоль ферромагнитной направляющей 1 полюса N и 5 магнита 12 шунтн-. руются отрезками направляющей 1, над которыми в данный момент находится устройство. Контакты 19 и 20 герконов 17 и 18 при этом разомкнуты, так как основное количество силовых линий « магнитного потока, создаваемого магнитом 12, замыкается через ферромагнитную направляющую 1, а через выводы и контакты герконов 17 и 18 замыкается небольшое количество силовых линий боковых потоков рассеяния магнита 12, недостаточное для замыкания контактов герконов. При смещении подвижного объекта 2, например, вправо (стрелка R фиг. 2 и 3) или влево (стрелкаL ) от ферромагнитной направляющей 1 на определенное расстояние (порядка 3 5 мм) ослабляется шунтирующее дейстт вие направляющей 1 для герконов 17 или 18 соотв етственно. Одновременно, возрастает правый или левый боковой поток рассеяния магнита 12,пересекакяций соответственно герконы 17 и 18, что вызывает замыкание контактов 19 или 20 герконов. Замыкания и размыкания контактов 19 и 20 образуются в согласующем блоке 38 в управляющие сигналы, которые поступают в блок 9 управления подвижного объекта 2. Блок 9 управления может быть выполнен, например, на основе микропроцессора и запоминающего устройства программы (ЗУП), в котором эапираа последовательность выполнения опеаций подвижным объектом 2 (или его 9 . составными устройствами и элементами), при поступлении в блок управле ния определенных сигналов. Так, например, при замыкании кон тактов 19 (что соответствует смеще- нию подвижного объекта 2 вправо от направляющей 1) микропроцессор выби рает из ЗУП программу, обеспечивающую заторможенный режим (снижение скорости вращения) работы колес 4 . до тех пор, пока подвижный объект 2 не в осстановит свой прежний курс (путем разворота относительно затор моженного колеса 4) и контакты 19 вновь разомкнутся, Возможен также вариант работы устройства, при котором в микропроцессоре блока 9 управления происходит постоянное сравнение текущего состояния контактов 19 и 20 герконов 17 и 18 с предвдущим состоянием этих же контактов. Для этого в запо минающем устройстве блока 9 управления вьвделен элемент памяти, в котором через определенный период, например 1/2 с, записывается состоя ние контактов 19 и 20 в двоичном коде (например, разомкнутые контакт могут характеризоваться состоянием 00, а замкнутые контакты могут ха рактеризоваться состоянием 11). В зависимости от сочетания текущего и предьщущего состояния контактов микропроцессор обеспечивает выборку соответствующих команд из ЗУП. Например, если предьдущее состояние контактов 19 и 20 характеризовалось как 00, а текущее состояние кон.тактов характеризуется также как 4)0, то микропроцессор выбирает из ЗУП программу, по которой оба колес 3 и 4 вращаются синхронно, т.е. подвижный объект 2 движется прямоли нейно . I- Если предьщущее состояние контак тов 19 и 20 характеризовалось как 00, а текущее состояние контактов характеризуется как 10, т.е. подвижный объект отклонился вправо (стрелка R на фиг. 2), то микропроцессор выбирает из ЗУП программу, по которой колесо 4 начинает вращаться с меньшей скоростью (зато моженной) до тех пор, пока сравнение предьщущего и текущего состояНИИ контактов 19 и 20 не даст комбинации состояний соответственно 10 - 00, после чего колесо 4 110 начинает вращаться-с прежней скоростью. Если предыдущее состояние контактов 19 и 20 характеризовалось как 10, т.е. объект 2 отклонился вправо, а текущее состояние контактов характеризуется как 11, т.е. подвижный объект 2, несмотря на заторможенный режим колеса 4, продолжает отклоняться вправо и оба геркона 17 и 18 находятся с одной стороны от направляющей 1 (это может быть вызвано, например, наездом колеса 4 на Посторонний предмет, случайно оказавшийся на пути следования уст ройства), то микропроцессор выбирает из ЗУП программу, по которой вращение колеса 4 прекращается (что вызывает резкий разворот подвижного объекта 2 в направлении ферромагнитной направляющей 1), и восстанавливается (в заторможенном режиме)после того, как сравнение состояний контактов 19 и 20 даст последовательность 11 - 10. Если же по истечении определенного времени, например 2-3 с, сравнение состояний контактов 19 и 20 продолжает характеризоваться последовательностью , то микропроцессор выбирает из ЗУП программу, по которой вращение колес 3 и 4 прекращается (аварийный останов). Это значит, что подвижный объект 2 отклонился в сторону от ферромагнитной направляющей 1 и по каким-то причинам (аварийным) не в состоянии сам вернуться на прежний курс. Подробный режим работы устройства обеспечивает весьма высокую устойчивость подвижного объекта 2 при движении вдоль ферромагнитной направляющей, так как позволяет восстанавливать прежний курс устройства в случае, если он изменился под воздейст-вием каких-либо причин, не вызывающих аварии устройства. Возможно и более простое исполнение блока 9 управления, например в виде релейного блока, обеспечивающего включение и выключение приводов 7 и 8 колес 3 и 4 по сигналам от чувствительных элементов 37 и 39. При работе устройства контакты 19 и 20 герконов 17 и 18 постоянно перемагничиваются небольшим по величине (0,1-0,5 мА) переменным током частотой, например, 400 Гц. Магнитное поле, вызываемое этим током, недостаточно для замыкания контактов 19 и 20, однако наличие тока исключает залипание контактов, которое может иметь место при срабатывании герконов, ЧТО равносильно повы шению быстродействия устройства, Как указывалось выше, чувствитель ный элемент 39 (фиг. 3) повернут относительно чувствительного элемента 37 на угол 90 и при движении подвижного объекта 2 взаимодействует с фер ромагнитными элементами 43 (метками) При этом контакты герконов 41 и 42 периодически размыкаются (при/ прохож дении над меткой) и замыкаются (впр межутках между метками) . Это позво;ляет при регулярном расположении ферромагнитных элементов 43 вдоль пути следования подвижного объекта 2 определять, расстояние, пройденное объектом 2, путем счета импульсов с герконов 41 и 42 чувствительного элемента 39. Счетчик импульсов быть составной частью блока управления 9 (микропроцессора). При накоплении определенного числа в счетчике импульсов (это число закладывается в микропроцессор при введении в блок управления исходных данных для следования по требуемому маршруту) микропроцессор выбирает .из ЗУП команду, по которой подвижный объект 2 останавливается и осуществляет одно или несколько взаимосвязанных перемещений, последователь ность которьгх определяется записанной в ЗУП программой. Примером такого перемещения может быть поворот подвижного объекта 2 в определенной точке цеха с целью следования по новому маршруту, например вдоль направляющей 45 (фиг. 3). На фиг. 3 подвижный объект 2, соверш11вший поворот на угол 90, изображен штрихпунктирными линиями. ( Наличие чувствительного элемента 39 на подвижном объекте 2 и его рас положение с некоторым смещением относительно ферромагнитной направляю щей 1 (это смещение определяется относительно оси н- н при номинальном расположении объекта 2 относительно направляющей 1, т.е. когда контакты герконов 41 и 42 разомкнуты) в плоскости движения объекта 2 в направлении, перпендикулярном направлению движения объекта 2, на оси, ортого611 .12 нальной оси поворота подвижного объекта 2 (на фиг. 3 ось поворота О ортогональна плоскости чертежа) позволяет определять начало и конец операции поворота подвижного объекта 2. В данном случае при движении объекта 2 вдоль направляющей 1 ферромагнитная направляющая 45 является очередной меткой для чувствительного элемента 39, по достижении которойблок 9 управления останавливает подвижный объект 2, отключает (на время выполнения операции поворота) чувствительный элемент 37 и вьщает команду поворота, по которой колеса 3 и 4 начинает вращаться в противофазе, но с равными по модулю угловыми скоростями, а подвижный объект 2 поворачивается вокруг оси О . В определенньй момент чувствительный элемент 39 начинает взаимодействовать с ферромагнитной направляющей 1, при этом размыкаются контакты герконов 41 и 42 (которые во время прохождения чувствительного элемента 39 между направляющими 45 и 1 замкнуты), НТО служит сигналом , окончания поворота. По этому сигналу блок 9 управления вьщает команду, по которой колеса 3 и 4 начинают вращаться синфазно, включается чувствительный элемент 37 и подвижный объект 2 перемещается вдоль направляющей 45, с которой взаимодействует чувствительйый элемент 37, при этом чувствитальный элемент 39 взаимодействует с ферромагнитными элементами 44. Для. избежания ложных срабатьшаний устройства (чувствительного элемента 39) от ферромагнитных элементов 43 и 44 при повороте, величина fit смещения чувствительного элемента 39 относительно осевой линии ферромагнитной направляющей 1 (45) не должна превьпнать величины ,c((t-d-ri) , f . где t - щаг между ферромагнитными элементами 44 (44); о - ширина ферромагнитного элемента 43 (44); п - расстояние от нейтральной плоскости V магнита до внешнего по отношению к направляющей 1 вывода герко- на 41 (42). а - расстояние от осевой линии ферромагнитной направляющей 1 (45) до нейтральной плоскости V магнита. 13 При выполнении этого условия чувстви тельный элемент 39 при повороте объ екта 2 вокруг оси О не проходит над ферромагнитными элементами 43 и 44. Для выполнения операции счета , меток в чувствительном элементе 39 достаточно установить один геркон. Однако наличие двух герконов (т.е. использование чувствительного элемента, конструкция которого идёнтична конструкции чувствительного элемента 37) позволяет повысить точност определения местоположения конкретно-го ферромагнитного элемента 43 (44), взаимодействующего с чувствительным элементом 39, т.е. повышает точность выхода подвижного объекта 2 в заданную точку (или повышает точ ность поворота объекта 2 на заданный угол) . На фиг. 4 изображен геркон 41 чувствительного элемента 39, который находится в районе расположения фер ромагнитного элемента 43. В зонах I и III шунтирующее действие феррома нитного элемента 43 весьма мало и величина бокового потока рассеяния магнита чувствительного элемента 39, который взаимодействует С герконом 41, достаточна для замыкания контактов геркона 41. В зоне II шунтирующее действие ферромагнитног элемента 43 велико,и величина бокового потока рассеяния магнита, в котором находится геркон 41, недостаточна для замыка-ния контактов геркона 41. На фиг. 4 расстояние С между граничными точками зоны И характеризует точность определения объектом 2 местоположения ферромагнитного элемента 43. Чем меньше расстояние С, тем выше точность. I На фиг. 5 изображены два геркона 41 и 42, расстояние D между которыми фиксировано (как это имеет мес то в чувствительных элементах 37 и 39). При движении объекта 2 относительно ферромагнитного элемента 4 если оба геркона 41 и 42 находятся на значительном расстоянии (в зо-не Г ) от метки 43 и ее шунтирующее действие мало, контакты обоих гекро нов 41 и 42 замкнуты и их состояние может быть выражено как 11. По ме ре приближения объекта 2 к ферромаг нитному элементу 43 геркон 41 входи в зону II и его контакты размыкаютс Это состояние герконов 4-1 и 42 мо114жет быть выражено как 01.Затем в момент входа в зону П геркона 42 размыкаются контакты геркона 42 и, если при этом геркон 41 еще находится в зоне It , состояние герконов чувствительного элемента 39 может быть выражено как 00.При дальнейшем движении объекта 2 герконы 41 и 42 поочередно перемещаются в зону III где контакты герконов вновь замыкаются, при этом состояние герконов 41 и 42 может быть выражено как 10, что соответствует нахождению герконов 41 и 42 соответственно в зонах 111 и II , и 11, что соответствует нахождению герконов 41 и 42 в зоне Щ . Как видно на фиг. 5, точность определения объектом 2 местоположения ферромагнитного элемента 43 при использовании в чувствительном элементе 39 двух герконов выше, чем при использовании одного геркона (фиг. 4). При использовании двух герконов координата ферромагнитного элемента 43 характеризуется состоянием герконов 00, при этом ошибка определения координаты зависит от соотношения расстояний D и С . где D - расстояние между осями герконов 41 и 42, а С - расстояние между границами зоны П . При этом,чем меньше D отличается от С , тем точнее подвижньй объект 2 может выйти в заданную точку цеха. Как указывалось, в чувствительных элементах 37 и 39 предусмотрена возможность регулирования расстояния ,D путем перемещения плат 15 и 16 (фиг. 2), что позволяет регулировать в определенных пределах точность выхода подвижного объекта 2 в заданную точку. Таким образом, можно сделать вывод, что при использовании одного геркона в чувствительном элементе 39 координата ферромагнитного элемента 43 представляет собой некоторую зону С , а при использовании двух герконов координата ферромагнитного элемента 43 представляет также некоторую зону, однако значительно более узкую, равную разности расстояний С и D (фиг. 4 и 5), т.е. использование двух герконов обеспечивает повышение точности работы всего устройства.
151
Кроме того, чувствительный элемент 39, выполненный на двух герконах, взаимодействующих с ферромагнитными элементами 43, вьщает сигнал в коде, что несомненно удобно для управления подвижным объектом 2, так как позволяет (в случае необходимости) определять какое положение занимает подвижный объект 2 относительно ферромагнитного элемента 431 не доехал до метки, находится над меткой или проехал несколько дальше метки соответственно состояния герконов: 01, 00, 10).
Предлагаемое устройство может быть также использовано при управ1116
,лении подвижным объектом с гусеничными движителями.
Устройство для управления подвижным объектом обладает простотой кон-, струкции; высокой устойчивостью объеК;Та при движении вдоль направляющей возможностью возвращения на прежний курс при случайном сходе с направляющей, что повышает надежность функiционирования устройства; возможностью вьщачи информации о состоянии контактов чувствительных элементов непосредственно в коде, что удобно при использовании микропроцессора в блоке управления подвижного объекта.
faetttif«n
tUtttlHI ,
ftit
напробление д5шкен(1Я
-If
Ч
J
Фиг. tf
ш
/
ii
г
л
X
N
itt
X
X
4J
(риг, 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Пуговица | 0 |
|
SU83A1 |
