Изобретение относится к измерительной технике и может быть использовано для контроля положения в прос транстве подвижных объектов и для контроля линейных размеров деталей. Известны струйные преобразователи линейных размеров и перемещений, содержавще питающие и приемное сопла оси которых пересекаются в одной точ ке Cl 1. Однако эти сопла не обладают дост точной чувствительностью и треб.уют большого расхода сжатого газа. Наиболее близким к изобретению по технической сути является струйный преобразователь линейных размеро и перемещений, содержаф1й корпус с кацапом питания и расположенный в ка нале питания шнек с центральным приемным каналом Известный преобразователь имеет ограниченную чувствительность и невысокую точность преобразований из-з нелинейной зависимости выходного сиг нала от контролируемого расстояния. Цель изобретения - повышение чуствительности и точности преобразов геля. . -:.Эта цель достигается тем, что в с труйном преобразователе линейных размеров и перемещений, содержащем корпус с каналом питания и расположенный в канале питания шнек с центральным приемньм каналом, в корпусе выполнены дополнительные каналы питания, расположенные Вокруг основного канала питания в плоскостях, параллельных оси основного канала питания и наклоненных к торцу корпуса в направлении наклона винтовой линии шнека. Наложение вихревых потоков на вых де из центрального и периферийных каналов питания повышает чувствитель ность и линеаризует характеристику преобразователя, что обеспечивает по вышение точности. . На фиг.1 показан предлагаемый пре образователь, общий вид; на фиг.2 сечение А-А на фиг.1. Струйный преобразователь линейных размеров и перемещений содержит кор.пус 1 с основным каналом 2 и дополни тельными каналами 3 питания и распол женный в основном канале шнек 4 с центральным приемным каналом 5 и вин .каналами 6. Дополнительные каналы 3 расположены вокруг основного канала 2 питания в плоскостях, параллельных оси основного канала и наклоненных к торцу 7 корпуса t в направлении наклона винтовой линии (винтовых каналов 6) шнека 4. Соотношение расходов через каналы 2 и 3 (давлений питания в этих каналах), расстояния мехщу их осями и углы их скрещивания выбираются из условия получения линейной зависимое-; ти мезеду расстоянием от преобразователя до детали 8 и давлением в приемном канале 5. В одном из вариантов преобразователя Минимальное расстояние « иежлу осями каналов 2 и 3 (расстояние между осью 2 и плоскостями, в которых расположены оси каналов 3) равно диаметру сЗ канала 2, а угол oL подъема винтовой линии шнека 4 находится с УГЛОМ с1С,2 наклона осей каналов 3 к торцу 7 в зависимости ЭО-tit,. Струйный преобразователь линейных размеров и перемещений работает следующим образом. Сжатый воздух под постоянным давлением поступает в основной канал 2 и по винтовым каналам 6 шнека истекает в зазор мезвду торцом 7 корпуса |н контролируемой деталью 8 в виде .конической расходящейся струи. Одновременно сжатый воздух поступает к дополнительным каналам 3 питания .и также истекает в зазор. При малых расстояниях до детали 8 (меньше диа14етра канала 2), струи из каналов 3 и канала 2 практически не вза1ШоДейств5чот между собой, поэтому давление воздуха в приемном канале 5 определяется только взаимодействием конической расходящейся струи из основного канала 2 с контролируемой деталью 8. По мере увеличения расстояния до детали 8 взаимодействие питающих сТруй усиливается, что приводит к практически линейному с большим градиентом снижению давления в приемном канале 5. Подбором соотношения расходов через каналы 2 и 3, расстояния между осями и углов их скрещивания можно добиться практически линейной зависимости медду расстоянием до детали 8 и выходным сигналом преобразователя - давлением в приемном кан/але. Таким образом, введение дополнительных каналов питания обеспечивает
31Г201634
при определенных зазорах между преоо- емком канале от зазора и тем самым разователем и контролируемой деталью повышает чувствительность и точность ycilheHKe зависимости давления в при- преобразователя.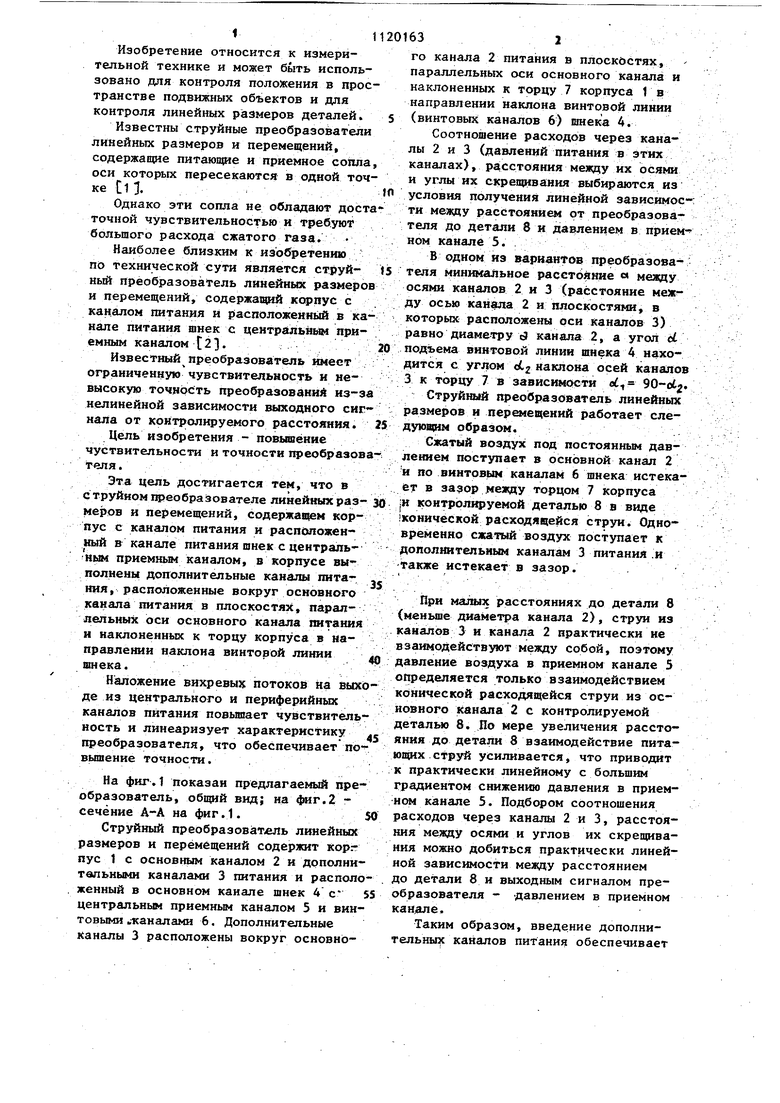
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйный пылемер | 1979 |
|
SU840703A2 |
| Пневматический преобразователь перемещения | 1990 |
|
SU1793212A1 |
| Струйный бесконтактный датчик | 1982 |
|
SU1130699A1 |
| СТРУЙНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА | 2002 |
|
RU2277224C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНТЕНСИВНОСТИ РАДИОАКТИВНОГО ИЗЛУЧЕНИЯ ГОРНЫХ ПОРОД В СКВАЖИНЕ | 2014 |
|
RU2569905C1 |
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1443977A1 |
| Пневматическое устройство для сигнализации изменения давления | 1987 |
|
SU1481705A1 |
| Пневматический струйный датчик положения | 1988 |
|
SU1518672A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и РАЗБРАКОВКИ ДЕТАЛЕЙ | 1972 |
|
SU348862A1 |
| ДАТЧИК КОЛИЧЕСТВА ВОЗДУХА | 1970 |
|
SU268684A1 |
СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ РАЗМЕРОВ И ПЕРЕМЕЩЕНИЙ, содержащий корпус с каналом питания и расположенный в канале питания шнек с центральным приемным каналом, отличающийся тем, что, с целью повьшения чувствительности и точности, в корпусе выполнены дополнительные каналы питания, расположенные вокруг основного канала питания в плоскостях, параллельных оси основного канала питания и наклоненных к торцу корпуса в направлении наклона винтовой линии шнека. (П ю О) со л/. /
-у-L//.i-W--,
//W/Ч
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Залманзон Л.А | |||
| АэроГидродинамические методы измерения входньк параметров автоматических систем | |||
| М., Наука, 1973, с.233, рис.6.6 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
