инвертором, а четвертый - к второму выходу преобразователя сигнала датчика положения ротора, который этим же выходЬм подсоединен к первому входу системы управления инвертором, рторой вход которой соединен с вторым выходом координатора, подсоединенного третьим выходом к третьему входу системы управления выпрямителем, а четвертым выходом - к пятому входу системы автоматического регулирования, шестой вход которой соединен с первым выходом индикатора режима, подсоединенного двумя входами соответственно к второму выходу системы автоматического регулирования через первый формирователь сигнала и к первому выходу преобразователя сигнала датчика положения ротора через второй формирователь сигнаг ла, второй выход индикатора режима подключен к первому входу блока задания, второй вход которого соединен с задатчиком угла регулирования
инвертора, выход блока задания под- ключей к третьему входу системы управления инвертором, а третий вход его подсоединен к второму выходу второго формирователя сигнала, подключенного вторым входом к задатчику граничной частоты вращения двигателя, отличающееся тем, что в устройство дополнительно введены логическое устройство, включающее в себя D -триггер и логический элемент ИЛИ-НЕ, нуль-орган и датчик выпрямленного тока, кроме того, индикатор режима снабжен двумя дополнительными входами, подключенными соответственно к выходу D -триггера логического устройства и к выходу нуль-органа, подсоединенного входом к датчику выпрямленного тока, а выход первого формирователя сигнала подключен к первому входу Ь-триггера логического устройства и к входу логичес-. кого элемента ИЛИ-НЕ,подсоединенноговыходом к второму входу J) -триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высоковольтный вентильный электродвигатель | 1985 |
|
SU1309239A1 |
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| Вентильный электропривод | 1981 |
|
SU987770A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Реверсивный вентильный электро-дВигАТЕль | 1979 |
|
SU803085A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1982 |
|
SU1064412A2 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Вентильный электродвигатель | 1979 |
|
SU811425A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Вентильный электродвигатель | 1980 |
|
SU951582A1 |
1. Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его, момента, заключающийся в том, что при изменении знака момента двигателя изменяют углы регулирования тиристорных групп выпрямителя и инвертора и формируют блокирующий сигнал определенной длительности, причем при переходе из двигательного режима в генераторный производят перевод выпрямителя в инверторный режим и задерживайт перевод инвертора в режим выпрямителя до снятия блокирующего сигнала, а при переходе из генераторного режт«а в двигательный производят перевод инвертора в инверторный режим и задерживают перевод выпрямителя в режим выпрямлеиия до снятия блокирующего сигнала, отличающийс я тем, что,с целью улучшения динами- . ческих показателей и надежности работы вентильного электродвигателя, а также расщирения области его применения, дрполнительно контролируют выпрямленный ток в звене постоянного тока и при достижении током нулевого значения производят снятие блокирующего сигнала, кроне того, при переходе из генераторного режима в двигательный на время существования блокирующего сигнала производят перевод выпрямителя в более глубокий инверторный режим путем увеличения угла управления выпрямителем. 2. Устройство для осуществлен ия i способа по п.1, содержащее синхронную машину, якорные обмотки которой (Л подключены к тиристорному преобразователю частоты со звеном постоянного тока, включакнцему в себя выпрямитель и инвертор, управляющие цепи ключей, которых подключены соответственно к выходам систем управления выпрямителем и инвертором, а также сглаживающий дроссель и шунтирующий тиристор, цепь управления которого подключена t 4 к выходу координатора, кроме того, устройство содержит систему автоматического регулирования, первый вход которой соединен через преобразоваэ тель сигнала с датчиком положения ротора, связанным с валом ротора эо синхронной машины, второй и третий входы соответственно с задатчиками тока и частоты вращения двигател, четвертый вход - с датчиком тока преобразователя частоты а один из ее выходов соединен с первым входом системы управления выпрямителем, вто рой вход которой подключен к выходу датчика напряжения,который этим выходом также соединен с первым входом координатора, второй и третий входы которого подключены соответственно к выходам систем управления выпрямителем и
Изобретение относится к области электротехники и может быть использовано для управления быстродействующими автоматизированными электроприводами с вентильными двигателями
Известен способ управления вентильным электродвигателем со звеном постоянного тока при изменении знак его момента, заключающийся в том, что изменение знака момента двигателя осуществляется путем изменения углов регулирования тиристорных групп выпрямителя и инвертора с помощью соответствующих систем импуль но-фазового управления, причем при переходе двигателя из двигательного режима в генера.торный выпрямитель переводится в инверторный режимработы, а инвертор - в выпрямительный а при переходе двигателя из генераторного в двигательный режим работы выпрямитель переводится в выпрямительный режим, а инвертор - в инверторный Г .
Недостатком известного способа являются низкие динамические показатели, особенно на пониженных частотах вращения двигателя, что обусловлено следующими факторами. При переходе двигателя из генераторного режима работы в двигательный перевЪд выпрямителя из инверторного режима в выпрямительный осуществляется практически мгн.овенно, а перевод инвертора из выпрямительного режима в инверторныП - по кривой ЭДС двигателя за определенный промежуток времени, зависящий от частоты вращения двигателя. При этом набшздается значительное увеличение выпрямленного тока в звене постоянного тока при неизменном знаке ЭДС инвертора и двигатель не переводится в двигательный режим, а тормозится с еще большей интенсивностью до тех пор, 0 пока инвертор не переведется в инверторный режим. При переходе двигателя из двигательного режима в генераторный выпрямитель переводится в инверторный режим по кривой сес тевого напряжения за время, зависящее от угла регулирования, но не превышающее 0,01 с, а инвертор переводится в выпрямительный режим мгновенно, что также создает предпосылки для увеличения выпрямленного то0 ка и интенсивного торможения привода. Таким образом, известный способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момен5 та создает предпосылки для возникновения рывков и ударов в приводимом механизме, снижает быстродействие привода и надежность его работы на пониженных частотах вращения, что 0 ограничивает область применения вентильных электродвигателей.
Наиболее близким к изобретению по технической сущности является способ управления вентильным электро5 двигателем со звеном постоянного то-,
ка при иэменении знака его момента, заключающийся в том, что при изменении знака момента двигателя изменяют углы регулирования тиристорных групп выпрямителя и инвертора и формируют блокирующий сигнал определен.ной длительности, причем при перехо.де из двигательного режима в генераторный производят перевод инвертора в йнверторный режим и задерживают перевод выпрямителя в режим выпрямления до снятия блокирующего сигнала.
Известный способ реализуется устройством, содержащим синхронную машину, якорные обмотки которой подключены к тиристориому преобразователю частоты со звеном постоянного тока, включающему выпрямитель и инвертор, управляющие цепи ключей которых подключены соответственно к выходам систем управления выпрямителем и инвертором, а также сглаживающий дроссель и шунтирующий тиристор .цепь управления которого.подключена к выходу координатора, кроме того, устройство содержит систему автоматического регулирования, один вход KOTOpojl соединен через преобразователь сигнала с датчиком положения .ротора, связанным с валом ротора синхронной машины, второй и третий входы соответственно с задатчиками тока и частоты вращения двигателя, четвертый вход - с датчиком тока преобр1азователя частоты, а один из ее выходов соединен с первым входом системы управления выпрямителем, второй вход которой подключен к выходу датчика напряжения, который этим выходом также соединен с пер вым входом координатора, второй и третий входы которого подключены соответственно к выходам систем управления выпрямителем и инвертором, а четвертый - к второму выходу преобразователя сигнала датчика положения, который этим же выходом подсоединен к первому входу системы управления инвертором, второй вход Которой соединен с вторым выходом координатора, подсоединенного третьим выходом к третьему вхолу системы управления выпрямителем, а четвертым выходом - к питому входу системы автоматического регулирования, шестой вход которой соединен с лерг вым выходом индикатора режима, подсоединенного двумя входами соответственно к второму выходу систеьш автоматического регулирования через первый формирователь сигнала и к пер вому выходу преобразователя сигнала датчика положения ротора через второй преобразователь сигнала, второй выход индикатора режима подключен к первому входу блока задания, второ вход которого соединен с задатчиком
угла регулирования инвертора, выход блока задания подключен к третьему входу системы управления инвертором, а третий вход его подсоединен к второму выходу второго формирователя сигнала, подключенного вторым входом к задатчику граничной частоты вращения двигателя 2 .
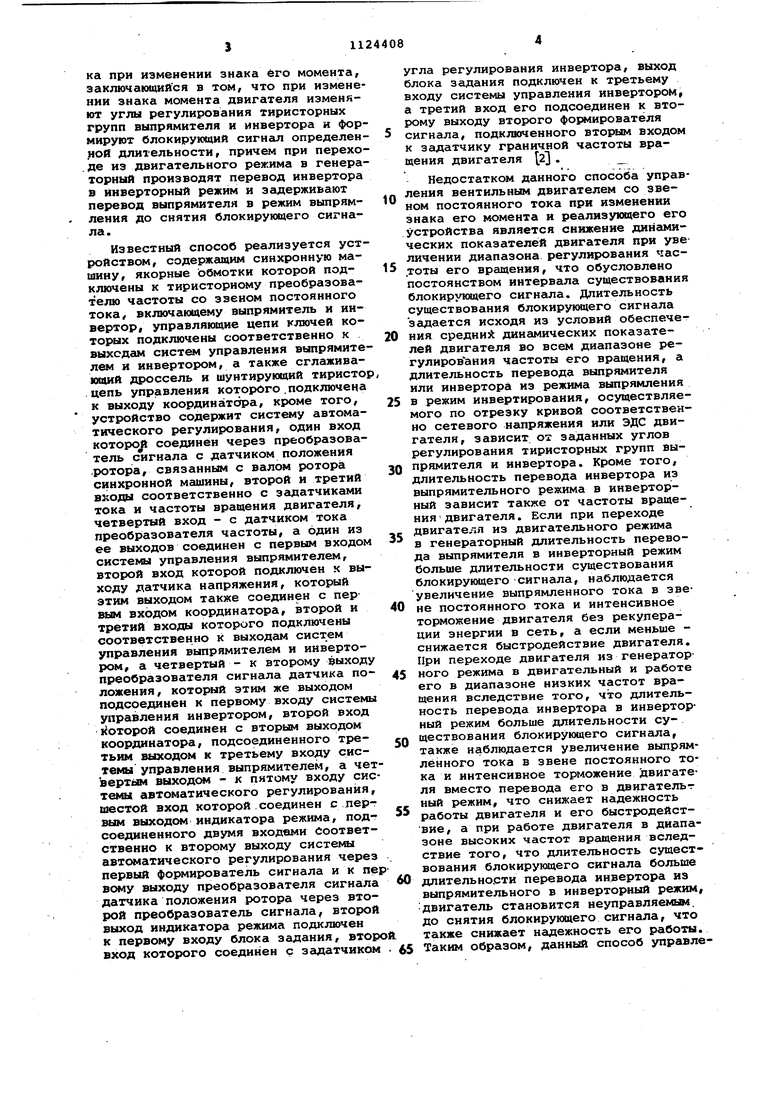
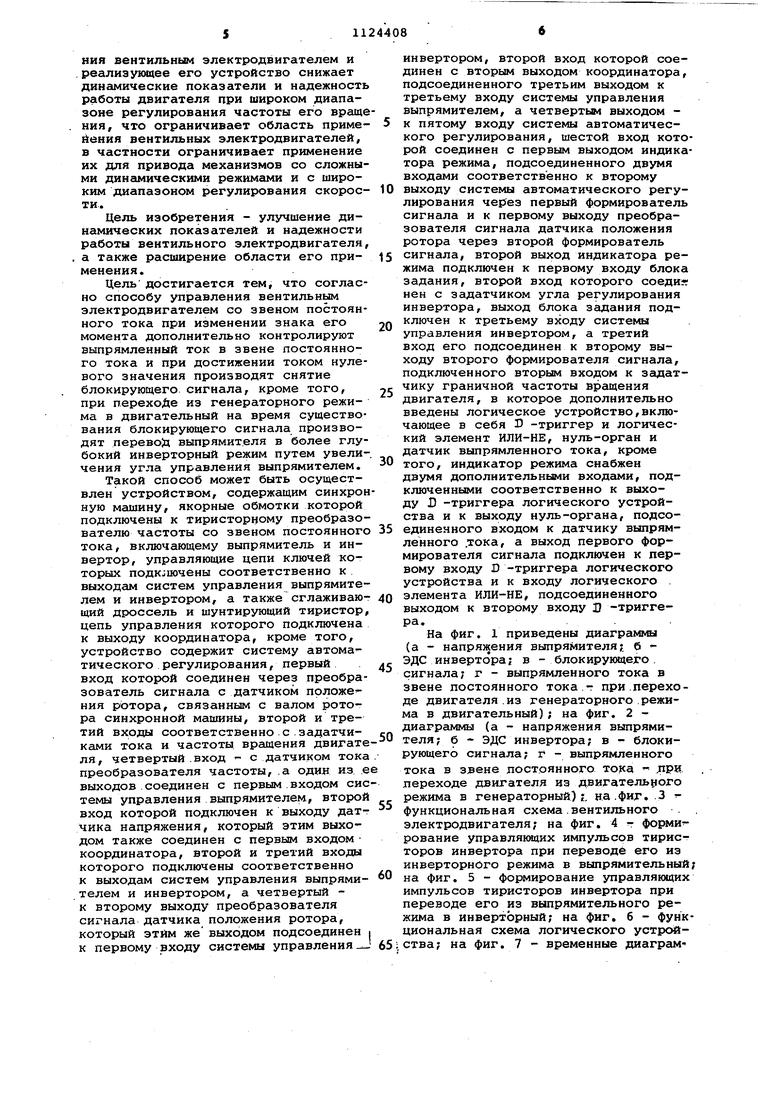
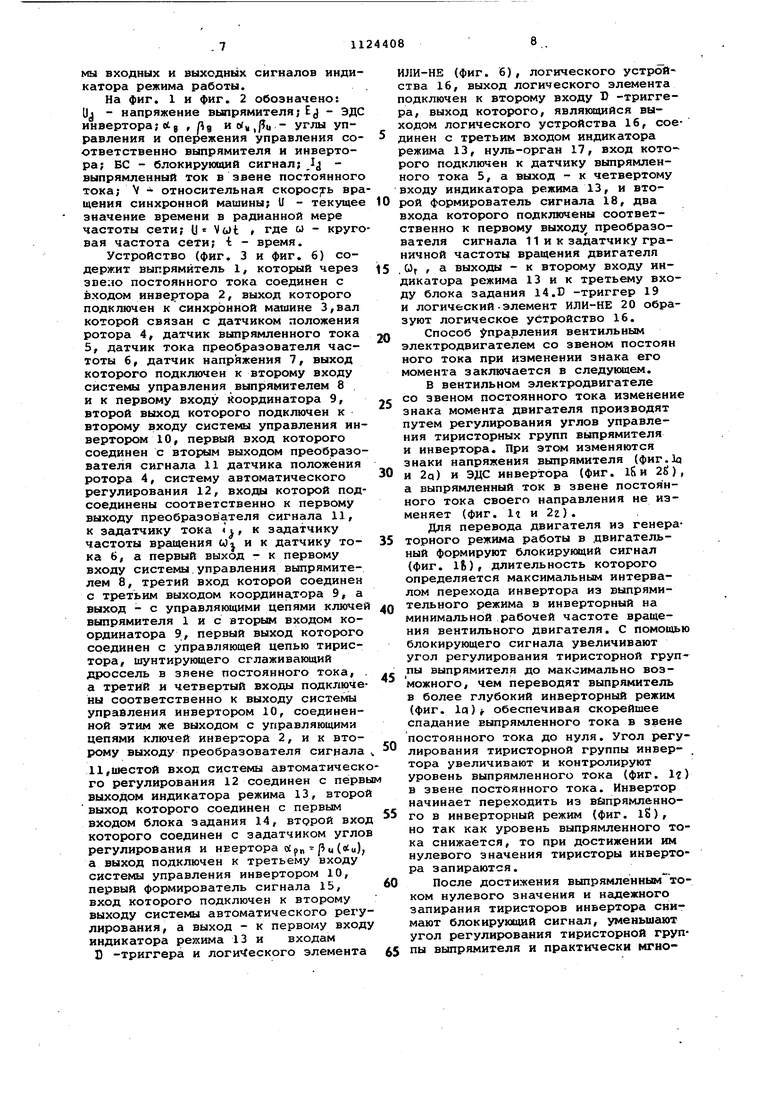
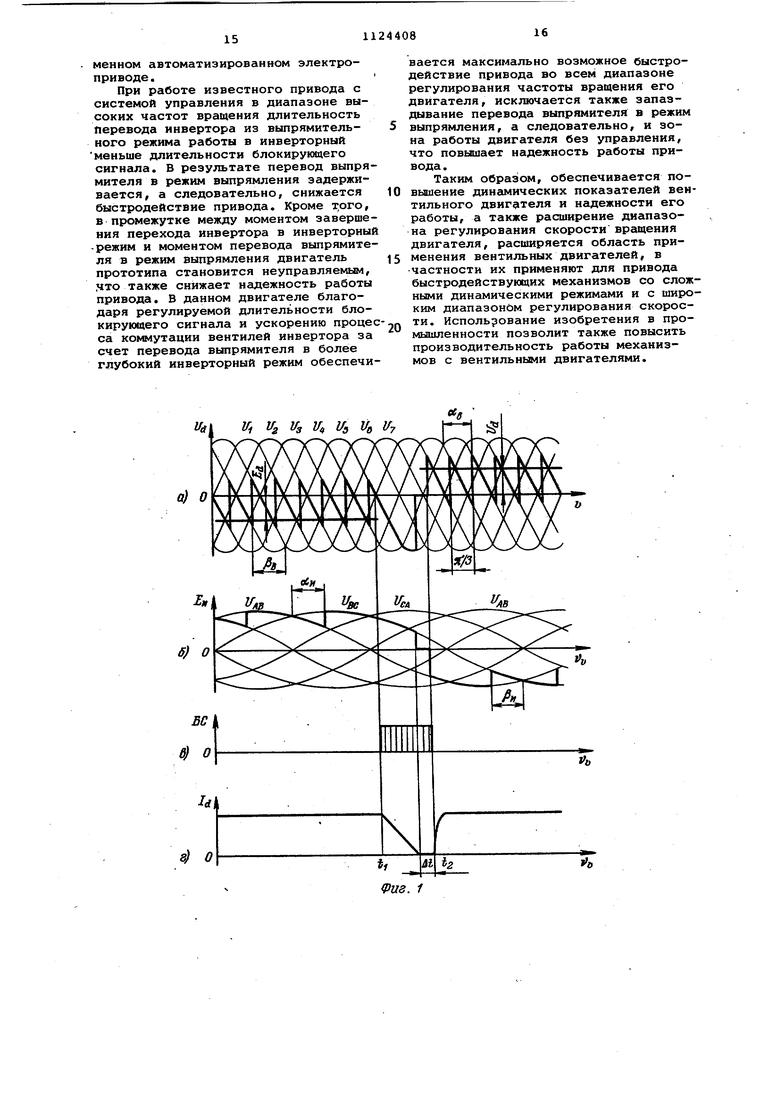
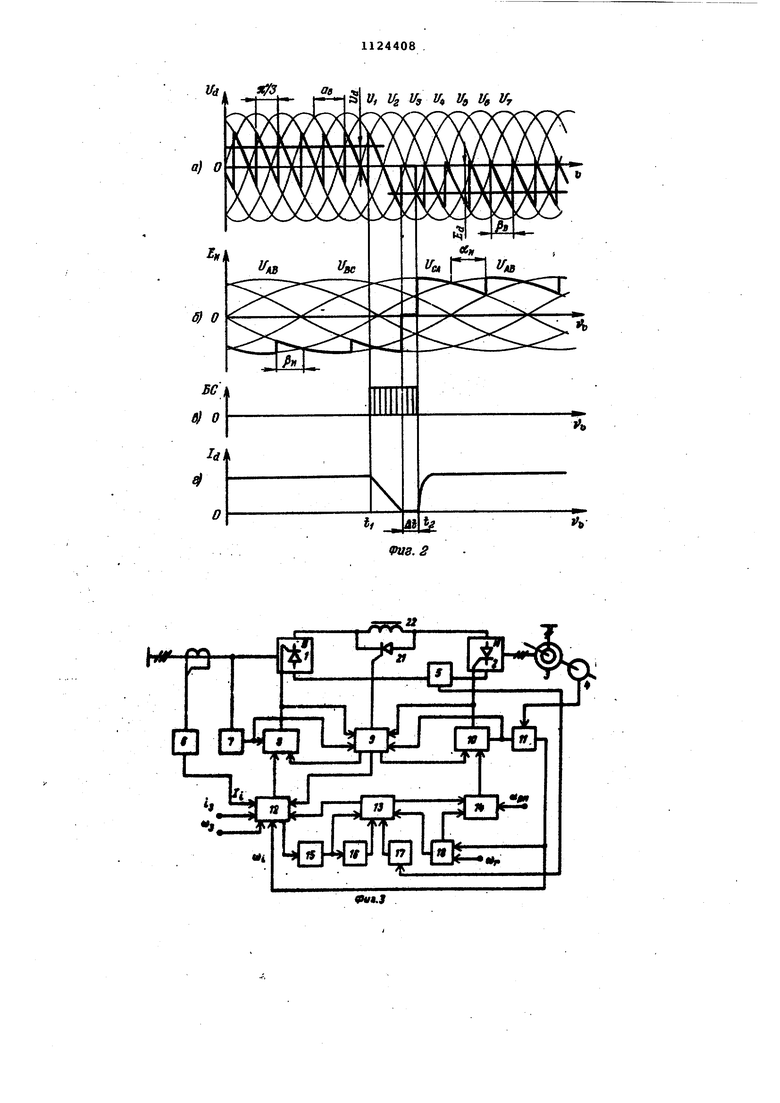
Недостатком данного способа управления вентильным двигателем со звеном постоянного тока при изменении знака его момента и реализующего его устройства является снижение динамических показателей двигателя при уве личении диапазона регулирования частоты его вращения, что обусловлено постоянством интервала существования блокирующего сигнгша. Длительность существования блокирующего сигнала задается исходя из условий обеспечения средний динамических показателей двигателя во всем диапазоне регулировЪния частоты его вращения, а длительность перевода выпрямителя или инвертора из режима выпрямления в режим инвертирования, осуществляемого по отрезку кривой соответственно сетевого напряжения или ЭДС двигателя, зависит от заданных углов регулирования тиристорных групп выпрямителя и инвертора. Кроме того, длительность перевода инвертора из выпрямительного режима в йнверторный зависит также от частоты вращения двигателя. Вели при переходе двигателя из двигательного режима в генераторный длительность перевода выпрямителя в йнверторный режим больше длительности существования блокирующего -сигнала, наблюдается увеличение выпрямленного тока в звене постоянного тока и интенсивное торможение двигателя без рекуперации знергии в сеть, а если меньше снижается быстродействие двигателя. При переходе двигателя из генератор ного режима в двигательный и работе его в диапазоне низких частот вращения вследствие того, что длительность перевода инвертора в инверторный режим больше длительности существования блокирующего сигнала, также наблюдается увеличение выпрямленного тока в звене постоянного тока и интенсивное торможение Двигателя вместо перевода его в двигательт ный режим, что снижает надежность работы двигателя и его быстродействие, а при работе двигателя в диапазоне высоких частот вращения вследствие того, что длительность существования блокирующего сигнала больше длительности перевода инвертора из выпрямительного в йнверторный режим, :двигатель становится неуправляемьав. до снятия блокирукхцего сигнала, что также снижает надежность его работы. Таким образом, данный способ управления вентильным электродвигателем и реализующее его устройство снижает динамические показатели и надежность работы двигателя при широком диапазоне регулирования частоты его враще ния, что ограничивает область примейения вентильных электродвигателей, в частности ограничивает применение их для привода механизмов со сложны ми динамическими режимами и с широким диапазоном регулирования скороети. Цель изобретения - улучшение динамических показателей и надежности работы вентильного электродвигателя . а также расширение области его применения. Цель достигается тем, что согласно способу управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента дополнительно контролируют выпрямленный ток в звене постоянного тока и при достижении током нулевого значения производят снятие блокирующего сигнала, кроме того, при переходе из генераторного режима в двигательный на время существования блокирующего сигнала производят перевод выпрямителя в более глубокий инверторный режим путем увеличения угла управления выпрямителем. Такой способ может быть осуществлен устройством, содержащим синхрон ную Мсшину, якорные обмотки которой подключены к тиристорцому преобразователю частоты со звеном постоянного тока, включающему выпрямитель и инвертор, управляющие цепи ключей которых подк:1ючены соответственно к выходам систем управления выпрямителем и инвертором, а также сглаживающий дроссель и шунтирующий тиристор, цепь управления которого подключена к выходу координатора, кроме того, устройство содержит систему автома тического регулирования, первый вход которой соединен через преобразователь сигнала с датчиком положе ния ротора, связанным с валом ротора синхронной машины, второй и третий входы соответственно с задатчиками тока и частоты вращения двигате ля, четвертый .вход - с датчиком тока преобразователя частоты,.а один из е выходов.соединен с первым . входом сис темы управления выпрямителем, второй вход которой подключен к выходу датчика напряжения, который этим выходом также соединен с первым входом координатора, второй и третий входы которого подключены соответственно к выходам систем управления выпрямителем и инвертором, а четвертый к второму выходу преобразователя сигнала датчика положения ротора, который этим же выходом подсоединен к первому входу система управления . инвертором, второй вход которой соединен с вторым выходом координатора, подсоединенного третьим выходом к третьему входу системы управления выпрямителем, а четвертым выходом к пятому входу системы автоматического регулирования, шестой вход которой соединен с первым выходом индикатора режима, подсоединенного двумя входами соответственно к второму выходу системы автоматического регулирования 4eiie3 первый формирователь сигнала и к первому выходу преобразователя сигнала датчика положения ротора через второй формирователь сигнсша, второй выход индикатора режима подключен к первому входу блока задания, второй вход которого соеди« нен с задатчиком угла регулирования инвертора, выход блока задания подключен к третьему входу системы управления инвертором, а третий вход его подсоединен к второму выходу второго формирователя сигнала, подключенного вторым входом к задатчику граничной частоты вращения двигателя, в которое дополнительно введены логическое устройство,включающее в себя Л -триггер и логический элемент ИЛИ-НЕ, нуль-орган и датчик выпрямленного тока, кроме того, индикатор режима снабжен двумя дополнительными входами, подключенными соответственно к выходу D -триггера логического устройства и к выходу нуль-органа, подсоединенного входом к датчику выпрямленного .тока, а выход первого формирователя сигнала подключен к первому входу D -триггера логического устройства и к входу логического элемента ИЛИ-НЕ, подсоединенного выходом к второму входу В -триггера. На фиг. 1 приведены диаграммы (а - напряжения выпрямителя;, б ЭДС инвертора; в -блокирующего, сигнала; г - выпрямленного тока в звене постоянного тока г при .переходе двигателя.из генераторного режима в двигательный); на фиг. 2 диаграммы (а - напряжения выпрямителя ; б - ЭДС инвертора; в - блокирующего сигнала; г - выпрямленного тока в звене постоянного тока дри переходе двигателя из двигатель юго режима в генераторный) г, на .фиг. 3 :Функциональная схема.вентильного . . электродвигателя; на фиг. 4 г формирование управляницих импульсов тиристоров инвертора при переводе его из инверторного режима в выпрямительный; на фиг. 5 - формирование управляющих импульсов тиристоров инвертора при переводе его из выпрямительного режима в инверторный; на фиг. б - функциональная схема логического устройства; на фиг. 7 - временные диаграм мы входных и выходных сигналов индикатора режима работы. На фиг. 1 и фиг. 2 обозначено: Uj - напряжение выпрямителя;Ej - ЭДС инвертора; Лg , , Hof,pu - УГЛЫ управления и опережения управления соответственно выпрямителя и инвертора; ВС - блокирующий сигнал; Ij выпрямленный ток в звене постоянного тока; V - относительная скорос гь вра щения синхронной машины; U - текущее значение времени в радианной мере частоты сети; (J Vwt , где и - круго вая частота сети; i - время. Устройство (фиг. 3 и фиг. 6) содержит выпрямитель 1, который через звено постоянного тока соединен с входом инвертора 2, выход которого подключен к синхронной машине 3,вал которой связан с датчиком положения ротора 4, датчик выпрямленного тока 5, датчик тока преобразователя частоты 6, датчик напряжения 7, выход которого подключен к второму входу системы управления выпрямителем 8 и к первому входу координатора 9, второй выход которого подключен к второму входу системы управления инвертором 10, первый вход которого соединен с вторым выходом преобразователя сигнала 11 датчика положения ротора 4, систему автоматического регулирования 12, входы которой подсоединены соответственно к первому выходу преобразователя сигнала 11, к задатчику тока 4, к задатчику частоты вращения сОг и к датчику тока 6, а первый выход - к первому входу системы управления выпрямителем 8, третий вход которой соединен с третьим выходом координатора 9, а выход - с управляющими цепями ключей выпрямителя 1 и с вторым входом координатора 9, первый выход которого соединен с управляющей цепью тиристора, шунтирующего сглаживающий дроссель в знене постоянного тока, а третий и четвертый входы подключе ны соответственно к выходу системы управления инвертором 10, соединенной этим же выходом с управляющими цепями ключей инвертора 2, и к второму выходу преобразователя сигнала 11,шестой вход системы автоматическ го регулирования 12 соединен с перв выходом индикатора режима 13, второй выход которого соединен с первым входом блока задания 14, втррой вход которого соединен с задатчиком угло регулирования и ннертора оСрп РМ (ои), а выход подключен к третьему входу системы управления инвертором 10, первый формирователь сигнала 15, вход которого подключен к второму выходу системы автоматического регу лирования, а выход - к первому вход индикатора 13 и входам D -триггера и логического элемента ИЛИ-НЕ (фиг. 6), логического устройства 16, выход логического элемента подключен к второму входу Г -триггера, выход которого, являющийся выходом логического устройства 16, соединен с третьим входом индикатора режима 13, нуль-орган 17, вход которого подключен к датчику выпрямленного тока 5, а выход - к четвертому входу индикатора режима 13, и второй формирователь сигнала 18, два входа которого подключены соответственно к первому выходу преобразователя сигнала 11 и к задатчику граничной частоты вращения двигателя . Of , а выходы - к второму входу индикатора режима 13 и к третьему входу блока задания 14.D -триггер 19 и логический-элемент ИЛИ-НЕ 20 образуют логическое устройство 16. Способ правления вентильным электродвигателем со звеном постоян ного тока при изменении знака его момента заключается в следующем. В вентильном электродвигателе со звеном постоянного тока изменение знака момента двигателя производят путем регулирования углов управления тиристорнкх групп выпрямителя и инвертора. При этом изменяются знаки напряжения выпрямителя (фиг.1а и 2q) и ЭДС инвертора (фиг. iSи 2S), а выпрямленный ток в звене постоянного тока своего направления не изменяет (фиг. 1г и 2г). Для перевода двигателя из генераторного режима работы в двигательный формируют блокирующий сигнал (фиг. 1Ь), длительность которого определяется максимальным интервалом перехода инвертора из выпрямительного режима в инверторный на минимальной рабочей частоте вращения вентильного двигателя. С помощью блокирующего сигнала увеличивают угол регулирования тиристорной груп пы выпрямителя до максимально возможного, чем переводят выпрямитель в более глубокий инверторный режим (фиг. Iq) обеспечивая скорейшее спадание выпрямленного тока в звене постоянного тока до нуля. Угол регулирования тиристорной группы инвертора увеличивают и контролируют уровень выпрямленного тока (фиг. 1) в звене постоянного тока. Инвертор начинает переходить из вйпрямленного в инверторный режим (фиг. 18), но так как уровень выпрямленного тока снижается, то при достижении им нулевого значения тиристоры инвертора запираются. После достижения выпрямленным током нулевого значения и надежного запирания тиристоров инвертора снимают блокирующий сигнал, уменьшают угол регулирования тиристорной группы выпрямителя и практически мгновенно переводят его в выпрямительный режим (фиг. IQ). Одновременно с выпрямителем вступает в работу в инверторном режиме инвертор (фиг.1) Вентильный двигатель начинает работать в двигательном режиме.
Для перевода двигателя из двигательного режима работы в генераторный формируют сигнал (фиг. 2Ь), блокирующий управление выпрямителем в режиме выпрямления и увеличивают угол регулирования тиристорной группы выпрямителя. Угол регулирования тиристорной группы инвертора на время существования блокирующего сигнала оставляют неизменным. Причем длительность блокирующего сигнала в этом случае выбирают равной максимальному интервалу перехода выпрямителя из выпрямительного режима в инверторный.
Таким образом осуществляют перевод выпрямителя в инзверторный режим (фиг. 2а) и задерживают перевод инвертора в режим выпрямления (фиг.28). При этом контролируют уровень выпрямленного тока в звене постоянного тока, который снижается (фиг. 2i) После достижения выпрямленным током нулевого значения через интервал времени it (фиг. 2г}, достаточный для восстановления запирающих свойств тиристоров инвертора, снимают блокирующий сигнал, уменьшают угол регулирования тиристорной группы инвертора и практически мгновенно переводят его в режим выпрямления. Езнтильный электродвигатель начинает работать в генераторном режиме.
Таким образом, данный способ управления вентильным двигателем со звеном постоянного тока при изменении знака его момента обеспечивает максимальное быстродействие вентильного двигателя во всем диапазо- не регулирования частоты его вращения, ликвидирует броски выпрямленного тока и уменьшает зону неуправляемости двигателя в переходных режимах; что улучшает динамические показатели и надежность работы вентильного двигателя.
Устройство, реализующее данный способ, функционирует следующим образом.
В устройстве (фиг. 3) выпрямитель 1 управляется обычной системой фазоого управления 8, которая синхрониируется с сетью датчиком напряжения . Фаза управляющих импульсов выпряителя 1 зависит от величины выходого сигнала системы автоматического егулирования 12, на втором и четвером входах которой сравниваются сигалы заданного ij и истинного I, знаений токов. На пятый и шестой входы
системы автоматического регулирования 12 подаются сигналы управления в пусковом режиме и при изменении знака момента двигателя.
Инвертор 2 управляется специальной системой фазового управления 10. На ее входы подаются сигналы датчика положения 4 ротора синхронной машины 3 через преобразователь сигнала 11 датчика положения ротора и сигнал
o заданного угла регулирования от задатчика через блок задания 14.
Для пуска двигател;я управлякнцие
импульсы систем фазового управления
8 и 10 перерабатываются в координа5 торе 9 и подаются на один из входов системы автоматического регулирования 12 и на управляющий вход тиристора 21, шунтирующего сглаживающий дроссель 22 в звене, постоянного тока. Координатор 9 служит также для согласования во всем рабочем диапазоне управлякидих импульсов последовательно расположенных тиристоров выпрямителя 1 и инвертора 2 по отношению к переменным напряжениям.
Системы фазового управления 8 и 10 обеспечивают работу вентильного двигателя во всех четырех квадрантах.
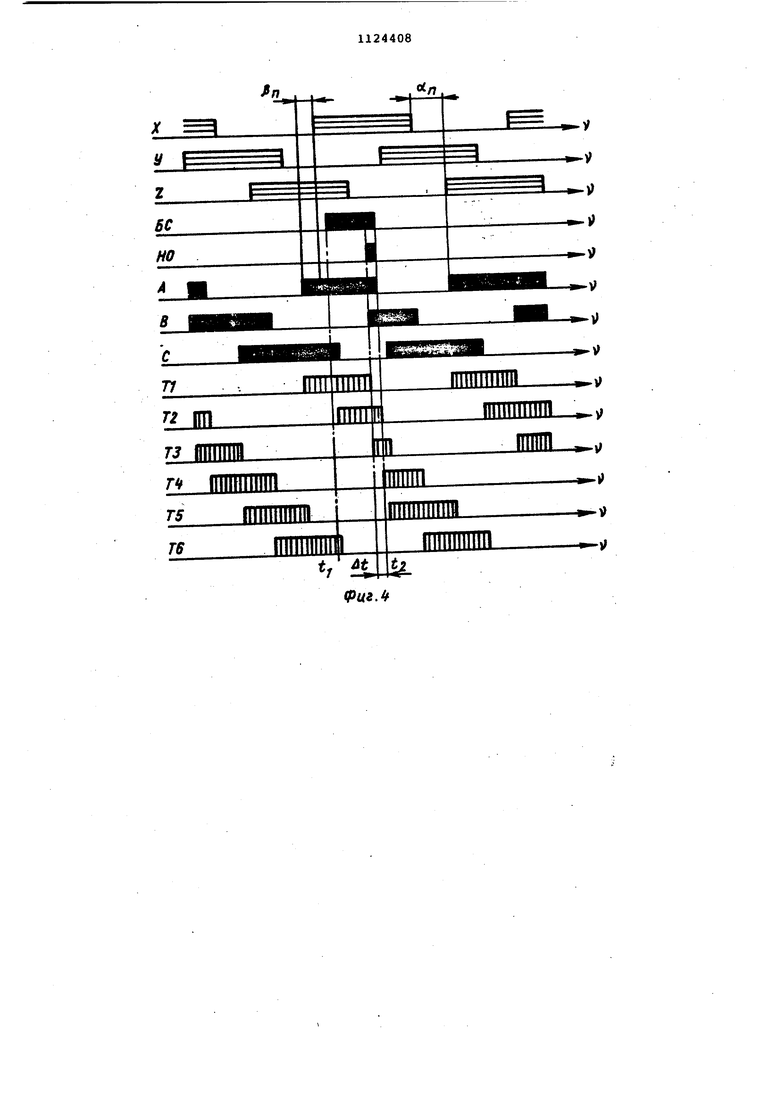
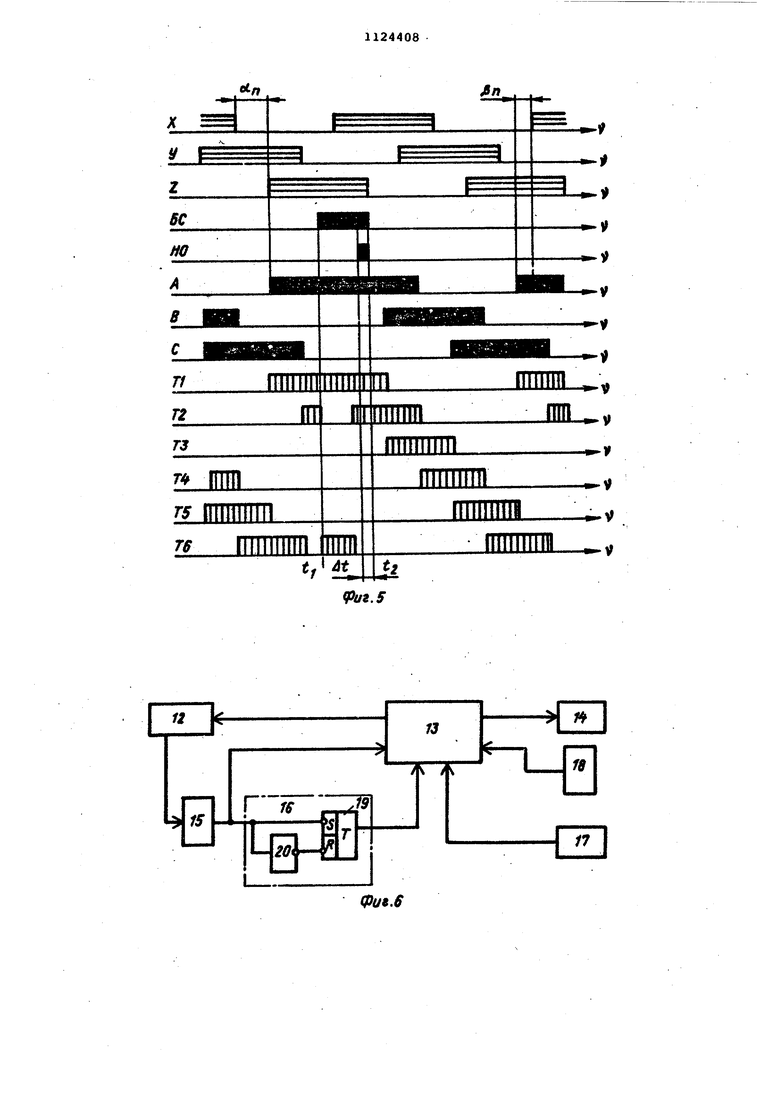
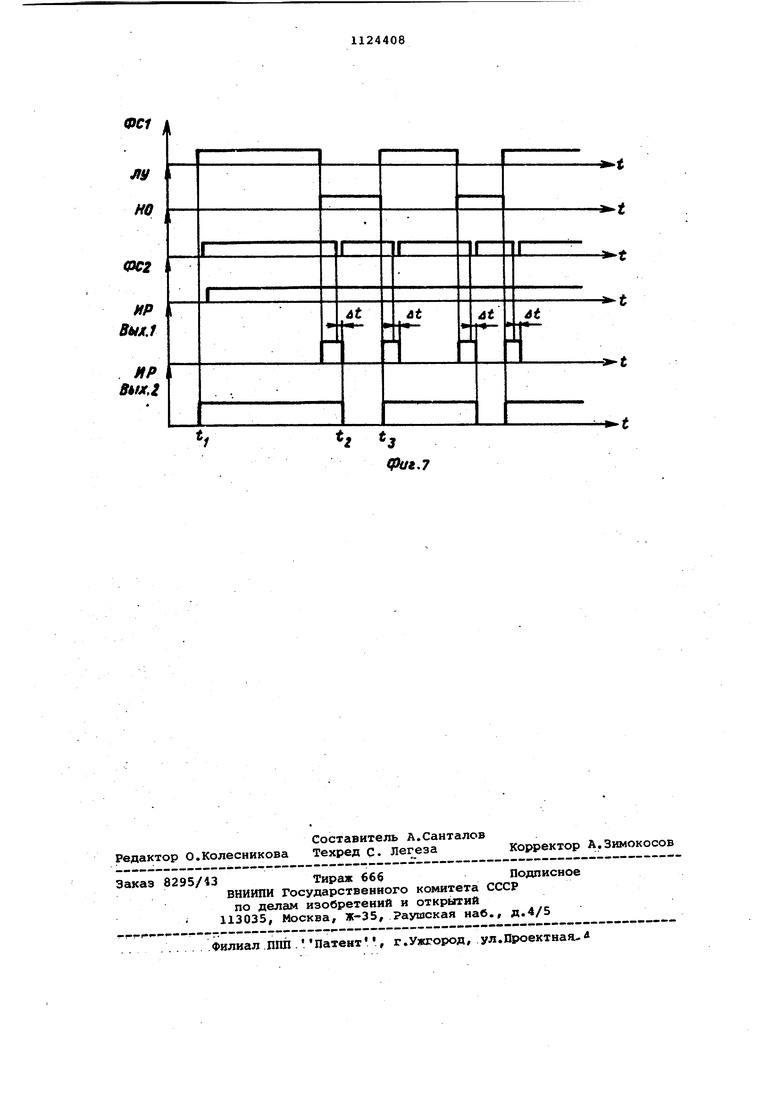
При достижении двигателем часто-, ты вращения, задаваемой задатчиком . граничной частоты, cjj ( 2 частота,, при которой противо-ЭДС двигателя достаточная для осуществления естественной коммутации тиристоров инвертора -2) блоком 18 формируется сигнал, который поступает через блок задания 14 на третий вход системы фазового управления 10 инвертором 2 и служит для переключения инвертора от пускового режима с искусственной коммутацией тиристоров инвертора 2 к режиму .инвертора ведомого нагрузкой. При этом коммутация тиристоров инвертора 2 осуществляется за счет противо-ЭДС двигателя 3. Блок 18 также формирует сигнал действительного вращения ротора двигателя 3, поступающий на второй вход индикатора режима 13, на первый и третий входы которого подается сигнал заданного знака момента вращения двигателя, формируемый блоком 1 5 и логическим устройством 16. В результате индикатор режима работы 13 формирует блокирующий сигнал определенной длительности, который поступает на шестой вход системы автоматического регулирования 12 и на первый вход блока задания 14. Блокирующий сигнал осуществляет управление переходом двигателя 3 от двигательного режима работы к генераторному и обратно, воздействуя соответствующим образом на системы фазового управления вьп рямителем 8 и инвертором 10. Так, в исходном положении вентиль ный двигатель стоит и сигналы с первого формирователя сигналов (фС1) 15 логического устройства (ЛУ) 16, нуль органа (НО)17, и второго формирователя сигналов (фС2) 18 (фиг. 7) нулевые (). При поступлении команды Пуск вентильного двигателя (момент времени i, , фиг. 7) сигналом с системы автоматического регулирования 12 первый формирователь сигнала 15 пере водит свой выходной сигнал в состояние Ч (двигательный режим работы вентильного двигателя, фиг. 7). Этот сигнал поступает на первый вход индикатора режима 13, который в этом случае формирует на втором выходе сигнал Ч. (ИР вых.2, фиг. 7), определяющий инверторный режим работы инвертора 2 (фиг. 3) . На первом выходе индикатора режима 13 (ИР вых.1 фиг. 7) сигнал О и режим работы выпрямителя 1 (фиг. 3) определяется сигналом с системы автоматического регулирования 12-, поступающим в его систему управления 8. Выходной сигнал логического устройства 16 -О После появления тока в звене постоя liHOro тока и начала разворота якоря двигателя 3 срабатывают формирователь сигнала 18 и нуль-орган 17 и на их выходах появляются (фиг. 7), которые поступают на второй и четвертый вхоДы индикатора режима 13. Вентильный двигатель работает в двигательном режиме: выпрямитель - в режиме выпрямления, инвертор - в режиме инвертирования. При поступлении команды на перевод вентильного двигателя из двигательного режима работы в генераторный по сигналу системы автоматического регулирования 12 первый формирователь сигнала 15 переводит сврй выход в состояние О . При этом срабатываетD -триггер 19 логи|Ческого устройства 16 (фиг. 6) и на его выходе появляется Ч (фиг.7) поступающая на третий вход индикатора режима 13. в результате на первом выходе индикатора режима 13 формируется блокирующий сигнал (фиг. 2Ь и 7 поступающий на шестой вход системы автоматического регулированная 12 и блокирующий ее первый выход. В резул тате угол регулирования тиристорной группы выпрямителя 1 увеличивается и он переводится с помощью системы фазового управления В в инверторный режим работы.Угол регулирования тиристорной группы инвертора 2 на дан ном этапе перевода вентильного двиг теля из двигательного режима работр в генераторный остается неизменным и инвертор продолжает работать в режиме инвертирования. В связи с переводом выпрямителя 1 в инверторный режим работы уровень) выпрямленного тока, контролируемый атчиком 5, в звене постоянного тока снижается (фиг. 2г). После достиения выпрямленным током нулевого значения тиристоры инверторной группы начинают закрываться, а на выходе нуль-органа 17 появляется О. В результате с интервалом времени t (фиг. 7), достаточным для восстановления запирающих свойств тиристоров инвертора 2, первый и второй выходы индикатора режима 13 переводятся в состояние О (момент времени z фиг. 7). При этом снимается блокирующий сигнал с шестого выхода системы автоматического регулирования 12 и она начинает управлять выпрямителем 1, работающим в инверторноМ режиме. Инвертрр по команде, поступающей с второго выхода индикатора режима 13 на блок задания 14, с помощью системы управления 10 практически мгновенно переводится в режим выпрямления. Вентильный двигaтeJp5 при этом работает в генераторном режиме . Таким образом обеспечивается оптимальное быстродействие вентильного двигателя за счет регулирования длительности переходного режима в зависимости от заданных углов управления выпрямителем 1 и исключаются броски тока при переходе от двигательного режима к генераторному за счет снижения выпрямленного тока в звене постоянного тока до нуля и надежного запирания тиристоров инвертора 2. В случае необходимости перевода двигателя 3 из генераторного режима работы в двигательный первый формирователь сигнала 15 по команде с системы автоматического регулирования 12 переводит свой выход в состояние Ч (момент времени ij фиг.7) . При этом J) -триггер 19 логического устройства 16 сигналом, поступающим на его второй вход через элемент ИЛИ-НЕ 20, возвращается в исходное состояние и на его выходе, появляется О. С выхода блока 15 сигнал Ч.также поступает на первый вход индикатора режима 13, который формирует на своих первом и втором выходах сигналы (фиг. 7), один из которых поступает на шестой вход системы автоматического регулирования 12, а второй - на третий вход блока задания 14. в результате система автоматического регулирования 12, воздействуя на систему фазового управления 8, увеличивает угол регулирования тиристорной группы выпря;.ителя 1 и переводит его в. более глубокий инверторный режим, обеспечивая тем самым скорейшее снижение уровня выпрямленного тока в звене постоянног тока. Блок задания 14, воздействуя на систему фазового управления 10, увеличивает угол регулирования тиристоров инвертора 2 и переводит его в инверторный режим работы (фиг. 1). При таком управлении тиристорными преобразователями 1 и 2 обеспечи вается быстрое снижение уровня вы-прямленного тока в звене постоянного тока до нуля и запирание тиристоров инвертора 2. После достижения выпрямленньпи то ком нулевого значения срабатывает нуль-оргап 17 и подает команду индикатору режима 13 на снятие блокирующего сигнала с его первого .выхода, который снимается через интервал времени ui (фиг. I г и 7), достаточный для восстановления запираю щих свойств тиристоров инвертора 2. После снятия блокирующего сигнала система автоматического регулиро вания 12, воздействуя на систему фазового управления 8, мгновенно уменьшает угол регулирования тиристорной группы выпрямителя 1 и практ чески мгновенно переводит его в режим выпрямления, а система фазового управления 10 сохраняет заданный в начале перехода режим работы, генерируя управляющие импульсы в порядке, обеспечивающем работу инвертора 2 в инверторном режиме. Вентильный двигатель при этом работает в двигательном режиме. Такое осуществление перехода вен тильного двигателя от генераторного режима работы к двигательному обеспечивает оптимальное быстродействие двигателя во всем диапазоне регулирования частоты его вращения .за счет регулирования длительности перехода в зависимости от частоты вра щения ротора двигателя и от его нагрузки,т.е. в зависимости от длительности спадания выпрямленного то ка до нуля и восстановления запираю щих свойств тиристоров инвертора, а также исключаются броски выпрямленного тока в переходном режиме. На фиг. 4 и фиг. 5 показано формирование управляющих импульсов тиристоров инвертора 2 при переходе двигателя 3 соответственно из двига тельного режима в генераторный и на оборот . Для формирования промежуточных сигналов А, В, С преобразователя си нала 11, поступающих на первый вход системы фазового управления 10 инвертором 2, в двигательном режиме работы используются передние фронты сигналов X Я датчика положения ротора 4, а в генераторном режи ме работы.- задние фронты сигналов V , у , Z . Причем в двигательном режиме сигналы А, В, С опережают сигналы X , (J , г на угол опережения управления инвертором /} , задаваемый задатчиком V- , а в генераторном режиме сигналы А, В, С отстают от сигналов датчика положения ротора X ,Ч , Z на угол управления инвертором «я, задаваемый также задатчиком dpp . Сигналы А, В, С определяют порядок формирования управляющих импульсов Т1-Т6 тиристоров инвертора 2. При поступлении команды БС (фиг.4) на перевод двигателя 3 из двигательного режима в генераторный (момент времени t, , фиг. 4) изменений в рабо те системы фазового управления 10 не происходит и инвертор 2 продолжает работать в режиме инвертирования. После спадения выпрямленного тока в звене постоянного тока до нуля и поступления команды НО от нуль-органа 17 (для наглядности сигнал нуль-органа 17 на фиг. 4 и 5 в отличие от фиг. 7 при нулевом значении тока представлен не нулевым уровнем, а каким-то положительным значением) через интервал времени &t (фиг. 4), достаточный для восстановления запирающих свойств тиристоров инвертора 2, снимается блокирующий сигнал ВС (момент времени i2 Фиг. 4). При этом изменяется порядок формирования сигналов А, В, С преобразователя сигнала 11 и соответственно порядок формирования управляющих импульсов Т1-Т6 системой фазового управления 10. В результате инвертор 2 переводится в режим выпрямления. При поступлении команды БС перевод двигателя 3 из генераторного режима в двигательный (момент времениi, фиг.57 мгновенно изменяется порядок формирования сигнала А, В, С и управляющих импульсов Tl-Тб тиристоров инвертора 2. Последний начинает переход от выпрямительного режима к ин-. верторному. После падения выпрямленного тока в звене постоянного тока до нуля поступает команда ПО (фиг. 5) от,нульоргана 17 на снятие блокирующего сигнала БС, который снимается через интервал времени it (фиг. 5), достаг точный для восстановления запирающих свойств тиристоров инвертора 2. После снятия блокирующего сигнала (момент времени ij , Фиг. 5) порядок формирования сигналов А, В, С иуправляющих импульсов Т1-Т6 сохранятся в соответствии с двигательным ежимом работы. Инвертор 2 вступает работу в режиме инвертирования. Данное устройство может быть выолнено на различных известных элеентах, широко применяемых в современном автоматизированном электроприводе .
При работе известного привода с системой управления в диапазоне высоких частот вращения длительность Перевода инвертора из вьтрямительного режима работы в инверторный
меньше длительности блокирующего сигнала. В результате перевод выпрямителя в режим выпрямления задерживается, а следовательно, снижается быстродействие привода. Кроме т-ого, в промежутке между моментом завершения перехода инвертора в инверторный
режим и моментом перевода выпрямителя в режим выпрямления двигатель прототипа становится неуправляемым, НТО также снижает надежность работы привода. В данном двигателе благодаря регулируемой длительности блокирующего сигнала и ускорению npoqec са коммутации вентилей инвертора за счет перевода выпрямителя в более глубокий ииверторный режим обеспечивается максимально возможное быстродействие привода во всем диапазоне регулирования частоты вращения его двигателя, исключается также запаздывание перевода выпрямителя в режим выпрямления, а следовательно, и зона работы двигателя без управления, что повышает надежность работы привода.
Таким образом, обеспечивается повьшение динамических показателей вентильного двигателя и надежности его работы, а также расширение диапазона регулирования скорости вращения двигателя, расширяется область применения вентильных двигателей, в частности их применяют для привода быстродействующих механизмов со сложными динамическими режимами и с широким диапазоном регулирования скорости. Использование изобретения в промышленности позволит также повысить производительность работы механизмов с вентильными двигателями.
в
Tfb
Фиг. 1
Vi Ц: V, U Uy Iff Ifj
.«Л.
Фиг Л
Сриг,7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сер | |||
| Автоматизированный электропривод, , электротехнология и электроснабжение промышленных предприятий | |||
| Информэлектро, 1975, te 5 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сер.Автоматизированный электропривод, элект тротехнология и электроснабжение промышленных предприятий | |||
| Информэлектро, 1973, № 46. | |||
