.1
Изобретение относится к вычислительной томографии на основе ядерного магнитного реэонанса и может быть использовано для изучения прос ранственного распределения химической структуры исследуемых объектов.
Известен вычислительный томограф на основе ядерного магнитного резонанса (ЯМР), содержащий постоянный г агнит, градиентные катушки, устройство .-управления градиентными катушками и радиочастотный тракт с датчиком. Пространственное разрешение в этом Томографе достигается те что резонансные условия формируются только в одной точке исследуемого объекта с последующим сканированием данной точки по объему ij ,
Недостатками этого даГР-томографа являются длительное время сканирова ния, а также недостаточное пространственное разрешение, обусловленное техническими трудностями при формировании резонансных условий в достаточно малой области,
Наиболее близким к предлагаемому по своей технической сущности является вычислительный томограф на основе ядерного магнитного резонанса, содержащий магнитную систему с расположенным в ней датчиком, включающим Х-градиентную катушку, Y-градиентную катушку,Z-градиентную катушку, соединенные с .устройством управления градиентами, и приемно-передающую катушку с исследуемым объектом, выход которой через блок детектирования сигнала соединен с центральным процессором, а вход через усилитель мощности соединен с форм фователем импульсов с двумя входами, первый вход которого соединен с синтезатором несущей частоты,-а второй с центральным процессором, который также соединен с устройством управления и отображения информации 21 .
К недостаткам данного устройства относятся функциональная огра даченность, обусловленная отсутствием возможности гибкого изменения программы управления градиентами и обработки данных, длительное врем сканирования, невозможность определения времени спин-спиновой релаксации, значительные искажения координат получаемого изображения из-за искаже шй при изменении тока
68502
в градиентных катушках во время сканирования,
I
Цель изобретения - повьшение точности измерений и расширение функциональных возможностей.
Поставленная цель достигается тем, что в вычислительный томограф на основе ядерного.магнитного резонанса, содержащий магнитную сие- . тему с расположенным в ней датчиком, включающим Х-градиентную катушку, Y-градиентную натугаку, 2-градиентную катушку, соединенные с устройством управления градиентами, и приемно-передающую катушку с исследуемым объектом, выход которой через блок дет.ектирования сигнала соединен с центральным процессором, а вход через усилитель мощности соединен с формирователем импульсов с двумя входами, первьм вход которого соединен с синтезатором несущей частоты, а второй - с центральным процессором, который также соединен с устройством управления и отображения информации, дополнительно введены сканирующая катушка, второй специализированный процессор и блок формирования селективного импульса с двумя входами, первый вход которого соединен с формирователем импульсов с двумя входами, выход - с усилителем мощности, а второй вход - с центральным процессором, к которому также подсоединены синтезатор несущей частоты, второй специализированный процессор и устройство управления градиентами, содержап ее четыре идентичных канала, причем первый каиал соединен с Xградиентпой катушкой, второй - с V-градиентной к:атушкой, третий - с 2-градиентной катушкой, а четверг тый - со сканирующей катушкой.
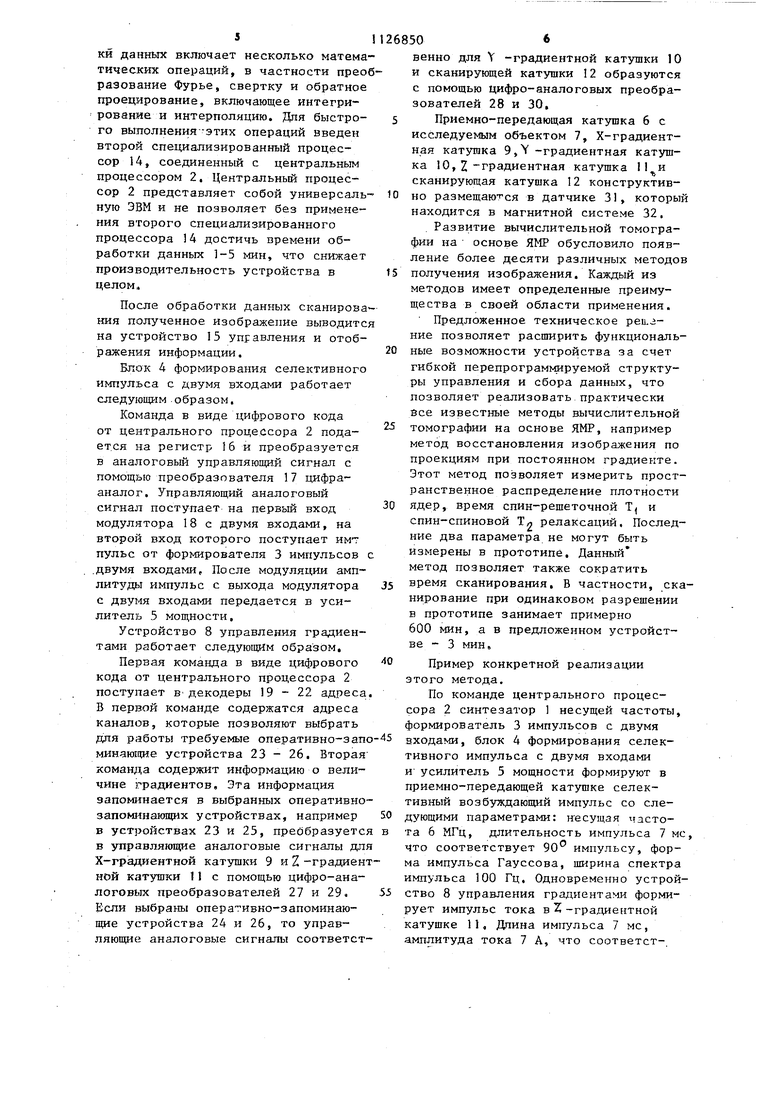
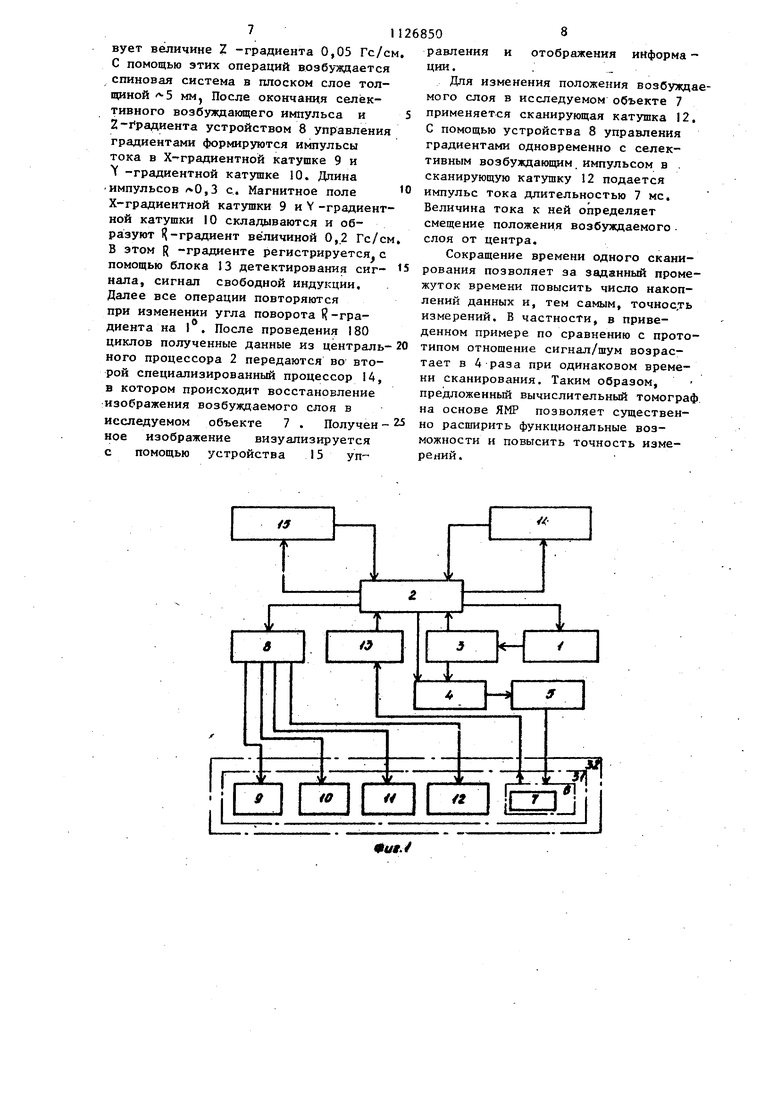
На фиг, представлена блок-схема предлагаемого вычислительного томографа на основе ЯМР; на фиг,2 блок-схема блока формирования селективного импульса с двумя входами; на фиг.З - блок-схема устройства управления градиентами,
ЯМР-томограф содержит синтезатор I несущей частоты, центральный процессор 2, формирователь 3 импульсов с двумя входами, блок 4 формирования селективного импульса с двумя )зход,ами, усилитель 5 мощности, приемно-передающую катушку б, исследуемый обьект 7, уст3
ройство 8 управления градиентами, Х-градиентную катушку 9, -градиенную катушку 10,Z -градиентную катушку 11, сканирующую катушку 12, блок 13 детектирования сигнала, второй специализированный процессор 14, устройство 15 управления и отображения информации, регистр преобразователь 17 цифра-аналог, модулятор 18 с двумя входами, декодеры 19-22 адреса оперативно запоминающие устройства 23-26, цифро-аналоговые преобразователи 27 - 30, датчик 31 и магнитную ст; тему 32. I
Вычислительный томограф на основе ядерного ЯМР включает синтезатор 1 несущей частоты, вход.которого соединен с центральным про - цессором 2, а выход с первым входом формирователя 3 импульсов с двумя входами, второй вход которог соединен с центральным процессором 2, а выход - с первым входом блока 4 формирования селективного импульса с двумя входами, второй вход которого соединен с центральным процессором 2, а выход через усилитель 5 мощности с приемно-пердающей катушкой 6, содержащей исследуемый объект 7; выход которой через блок 13 детектирования сигнал соединен с центральным, процессором к которому также подключены второй специализированный процессор 14, устройство 15 управления и отображения информации и устройство 8 управления градиентами, содержащие четыре Идентичных канала, которые соответственно соединены с Х-градиентной катушкой 9, Y -градиентной катушкой 10,2 -градиентной катушкой 11 и сканирующей катушкой 12 располагающимися вместе с приемнопередающей катушкой 6 в датчике 31 помещенном в магнитную систему 32, Блок 4 формирования селективного импульса с двумя входами включает последовательно соединенные регистр 16, преобразователь 17 цифрааналог и модулятор 18 с двумя входа ми. Устройство управления градиентами содержит четыре идентичных канала, каждый из которых включает по одному из декодеров 19-22 адреса, по одному из оперативнозапоминающих устройств 23 - 26 и по
268504
одному из цифро-аналоговых преобра- зователей 27 - 30,
Устройство работает следующим образом.
5 Синтезатор I несущей частоты по команде центрального процессора 2 генерирует синусоидальные колебания с частотой, равной частоте ядерного магнитного резонанса )0 исследуемого ядра, которые поступают на первый вход формирователя 3 импульсов с двумя входами, в котором по командам от центрального процессора 2, поступающим через j второй вход, формируется фаза и длительность импульсов, а также расстояние между импульсами. Сформированная последовательность импульсов поступает на первый вход блока 4 20 формирования селективного импульса с двумя входами, в котором происходит модуляция амплитуды импульсов по форме, задаваемой командами, поступающими на второй вход от централь5 ного процессора 2, Процесс формирования селективного импульса осуществляется с целью получения заданной спектральной формы импульса. Полностью сформированная последователь0 ность импульсов усиливается в усилителе 5 мощности и передается в приемно-переда.ощую катушку 6, в которой находится исследуемьш объект 7. Одновременно с передачей команды на синтезатор 1 несущей частоты подается команда на устройство 8 управления градиентами, которое вьщает управляющие сигналы на Х-градиентную катушку 9, Y-градиентную катущQ ку 10, Z-градиентную катушку 11 и сканирующую катушку 12.
Возбуждающие импульсы и градиенты магнитного поля переключаются строго синхронно по коьшндам центрального
5 процессора 2, После действия возбуждающих импульсов в приемпо-передающей катушке наводится сигнал ядерного магнитного резонанса, который в блоке 13 детектирования сигнала
0 подвергается квадратурному детектированию и преобразованию в цифровые коды. Из блока 13 детектирования сигнала- цифровые коды поступают в центральный процессор 2, который
5 кроме функции управления выполняет математическую обработку сигналов с целью получения изображения исследуемого объекта 7, Процесс обработ3кй данных включает несколько матема тических операций, в частности прео разование Фурье, свертку и обратное проецирование, включающее интегрирование и интерполяцию. Для быстрого выполнения этих операций введен второй специализированный процессор 14, соединенный с центральным процессором 2, Центральньй процессор 2 представляет собой универсаль ную ЭВМ и не позволяет без применения второго специализированного процессора 14 достичь времени обработки данных 1-5 мин, что снижает производительность устройства в целом. После обработки данных сканирова ния полученное изображение выводитс на устройство 15 управления и отображения информации. Блок 4 формирования селективного импульса с двумя входами работает следующим образом. Команда в виде цифрового кода от центрального процессора 2 подается на регистр 16 и преобразуется в аналоговый управляющий сигнал с помощью преобразователя 17 цифрааналог. Управляющий аналоговый сигнал поступает на первый вход модулятора 18 с двумя входами, на второй вход которого поступает имт пульс от формирователя 3 импульсов .двумя входами. После модуляции амплитуды импульс с выхода модулятора с двумя входами передается в усилитель 5 мощности, Устройство 8 управления градиентами работает следуюхцим образом. Первая команда в виде цифрового кода от центрального процессора 2 поступает в декодеры 19 - 22 адреса В первой команде содержатся адреса каналов, которые позволяют выбрать для работы требуемые оперативно-зап минающие устройства 23 - 26. Вторая команда содержит информацию о величине градиентов. Эта информация запоминается в выбранных оперативно запоминающих устройствах, например в устройствах 23 и 25, преобразуетс в управляющие аналоговые сигналы дл Х-градиентной катушки 9 и Z -градиен ной катушки 1I с помощью цифро-аналоговых преобразователей 27 и 29. Если выбраны оперативно-запоминающие устройства 24 и 26, то управляющие аналоговые сигналы соответст 50 венно для V -градиентной катушки 10 и сканирующей катушки 2 образуются с помощью Цифро-аналоговых преобразователей 28 и 30, Приемио-передающая катушка 6 с исследуемым объектом 7, Х-градиентная катушка 9,V -градиентная катушка 10,2 градиентная катушка 1 и сканирующая катушка 12 конструктивно размещаются в датчике 31, который находится в магнитной системе 32. Развитие вычислительной томографии на основе ЯМР обусловило появление более десяти различных методов получения изображения. Каждый из методов имеет определенные преимущества в своей области применения. Предложенное техническое решзние позволяет расширить функциональные возможности устройства за счет гибкой перепрограм№руемой структуры управления и сбора данных, что позволяет реализовать практически все известные методы вычислительной томографии на основе ЯМР, например метод восстановления изображения по проекциям при постоянном градиенте. Этот метод позволяет измерить пространственное распределение плотности ядер, время спин-решеточной Т и спин-спиновой Тл релаксаций. Последние два параметра не могут быть измерены в прототипе. Данный метод позволяет также сократить время сканирования, В частности, сканирование при одинаковом разрешении в прототипе занимает примерно 600 мин, а в предложенном устройстве - 3 мин, Пример конкретной реализации этого метода. По команде центрального процессора 2 синтезатор 1 несущей частоты, формирователь 3 импульсов с двумя входами, блок 4 формирования селективного импульса с двумя входами и усилитель 5 мощности формируют в приемно-передающей катушке селективный возбуждающий импульс со следующими параметрами: несущая частота 6 МГц, длительность импульса 7 мс, что соответствует 90 импульсу, форма импульса Гауссова, ширина спектра импульса 100 Гц. Одновременно устройство 8 управления градиентами формирует импульс тока в Z-градиентной катушке 11, Длина имггульса 7 мс, амплитуда тока 7 А, что соответст7вует величине Z -градиента 0,05 Гс/с С помощью этих операций возбуддается спиновая система в плоском слое тол1Щ1Иой мм, После окончания селективного возбуждакицего импульса и 2-г радиента устройством 8 управления градиентами формируются импульсы тока в Хтрадиентной катушке 9 и -градиентной катушке 10. Длина импульсов 0,3 с. Магнитное поле Х-градиентной катушки 9 и Y-градиент ной катушки IО складываются и образуют 1 -градиент величиной 0,2 Гс/с В этом R -градиенте регистрируется с помощью блока 13 детектирования сигYT « 4V « ел Л.--. 11 нала, сигнал свободной индукции. Далее все операции повторяются при изменении угла поворота 1 -градиента на 1 . После проведения 180 ЦИКЛОВ полученные данные из централь ч.-.1ного процессора 2 передаются во второй специализированный процессор 14, в котором происходит восстановление :изображения возбуждаемого слоя в исследуемом объекте 7 . Получен кое изображение визуализируется с помощью устройства 15 уп. 8 850 и отображения ииформа равленияции. Для изменения положения возбуждаемого слоя в исследуемом объекте 7 применяется сканирующая катушка I2, С помощью устройства 8 управления градиентами одновременно с селективным возбуждающим, импульсом в , сканирующую катушку 12 подается импульс тока длительностью 7 мс. Величина тока к ней определяет смещение положения возбуждаемого. слоя от центра. Сокращение времени одного сканиг ч - oj v-ntinn uMMuiu скани- рования позволяет за заданный промежуток времени повысить число накоплений данных и, тем самым, точность измерений. В частности, в приведенном примере по сравнению с прото ,. iij-..-i,.. IIW L-Kdoncnniu i: upor типом отношение сигнал/шум возрастает в 4 раза при одинаковом времени сканирования. Таким образом, предложенный вычислительный томограф, на основе ЯМР позволяет существенно расширить функциональные возможности и повысить точность измерений.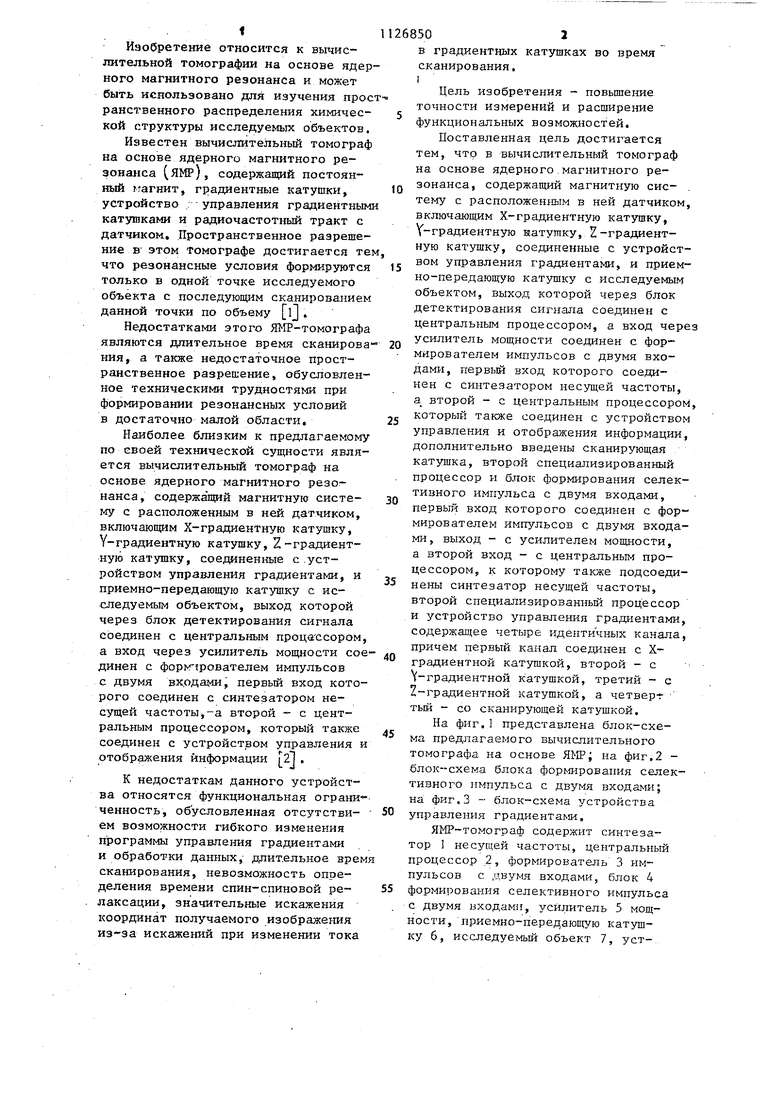

| название | год | авторы | номер документа |
|---|---|---|---|
| ЯМР - томограф | 1988 |
|
SU1644009A1 |
| Вычислительный томограф на основе ядерного магнитного резонанса | 1984 |
|
SU1226216A1 |
| МАГНИТНО-РЕЗОНАНСНЫЙ СКАНЕР ДЛЯ ОРТОПЕДИЧЕСКОГО МАГНИТНОГО ТОМОГРАФА | 2010 |
|
RU2417745C1 |
| Способ ЯМР-томографии | 1988 |
|
SU1702271A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КЕРНОВ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2747741C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2018 |
|
RU2679630C1 |
| УСТРОЙСТВО МАГНИТОРЕЗОНАНСНОГО ТОМОГРАФА | 1992 |
|
RU2047871C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| КАРТИРОВАНИЕ ФУНКЦИИ ГРАДИЕНТНОГО ИМПУЛЬСНОГО ОТКЛИКА | 2017 |
|
RU2736557C2 |
| Способ ЯМР-томографии | 1986 |
|
SU1368752A1 |
ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ HA ОСНОВЕ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА, содержащиГ: магнитную систему с расположенным в ней датчиком, вклю чающим Х-градиентную катушку,Y -градиентную катушку, -градиентную катушку, соединенные с устройством управления градиентами, и приемноперьдающую катушку с исследуемым объектом, выход которой через блок детектирования сигнала соединен с центральным процессором, а вход через усилитель мощности соединен с форми рователе 1 импульсов с двумя входами, первый вход которого соединен с синтезатором несущей частоты, а второй - с центральным процессором, который также соединен с устройством управления и отображения инфор- мат1ии, отличающийся тем, что, с целью повышении точности из мерений и расширения функциональных возможностей,, в него дополнительно введены сканирующая катушка, второй специализированный процессор и блок .формирования селективного импульса i с двумя входами, первый вход кото рого соединен с формирователем им(Л пульсов с двумя входами, выход с усилителем мощности, а второй вход - с центральным процессором, к которому также подсоединены синтезатор несущей частоты, второй специализированный процессор и устройство управления градиентами, содержащее четыре идентичных канала, г причем первый канал соединен с Xьр градиентной катушкой, второй - с CD 00 Y-градйентной катушкой, третий с2-градиентной катушкой, а четсл вертый - со сканирующей катушкой.
/5
Л
.
Фиг.2.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Hinschow W,S | |||
| Image Formation by Nuclear llagnetis Resonance | |||
| The Sensitive-point Method | |||
| J.Appl.Phys,1974, V.47, №8, p.3709, прототип). | |||
