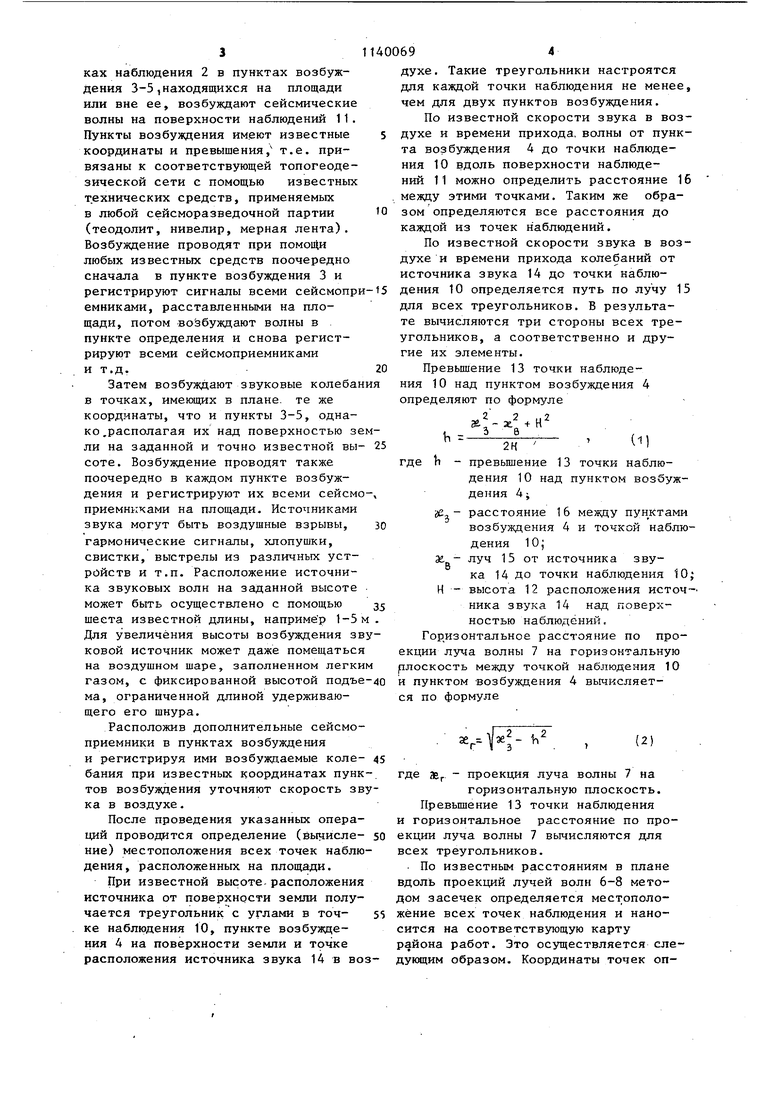
Изобретение относится к геофизической разведке, в частности сейсморазведке, и может быть использовано для определения пространственного п ожения точек наблюдений при прозедении профильных или площадных исследований при поисках месторождений полезных ископаемых. Известен способ определения мест положения точек наблюдения в системе для сейсмической разведки, включающий размещение топопривязчика и барометрических станций в точки наблюденийCl3. Недостатком этого способа является необходимость использования спе циального оборудования (трпопривязчик, баростанцйя) для определения пространственного положения точек на блюдения. При площадных работах, гд число точек наблюдения может достигать нескольких сот при одной расстановке,трудоемкость работ при определении координат и превышений резко возрастает. Кроме того, в лесистой местности необходимо прору бить большее количество просек для прохождения топопривязчика и баростанции. В болотисной местности и труднодоступных районах определение координат и превышений с помощью то попривязчика и баростанций сзпдественно затруднено. Известен способ определения мест положения точек наблюдения при сейсмо разведке, включающий возбуждение ко лебаний в пункте возбуждения с известными координатами, регистрацию лебаний в точках наблюдения и вычис лении удалений точек наблюдения от пункта возбуждения.23. Недостатком способа является невысокая точность определения рассто ний между пунктом возбуждения и точ ками наблюдения из-за ошибок в распознавании волн, находящихся в первых, вступлениях записи, среди которых при неглубоко залегающих границах могут быть прямые, рефрагирован ные или преломичные волны, а также невозможность определения координат и превьшений точек наблюдения для большого количества сейсмоприемнико расположенных на расстановке с произвольной конфигурацией. Цель изобретения - повьш1ение точ ности определения пространственного положения. Поставленная цель достигается тем, что согласно способу определения местоположения точек наблюдения при сейсморазведке, включакщему излучение колебаний в пункте возбуждения с известными координатами, регистрацию колебаний в точках наблюдения и вычисление удалений точек наблюдения от пункта возбуждения, излучают звуковые колебания,используя при этом не менее одного дополнительного пункта возбуждения с известными координатами, причем первоначально звуковые колебания излучают на поверхности наблюдений, а затем на известном удалении от нее, уточняют скорость звука между рунткамй с известными координатами и по временам регистрации звуковых волн в точке наблюдения и уточненной скорости звука определяют пространственное положение точек наблюдения. Сущность способа заключается в том,что наличие минимума двух пунктов возбуждения на двух известных высотных уровнях позволяет методом засечек определить пространственное положение любого пункта, в котором проводится регистрация колебаний, распространяющихся с известной скоростью. На фиг.1 изображен возможньй вариант реализации способа на примере площадной расстановки сейсмоприемников, план;на фиг.2 - сечение в вертикальной плоскости, проходящей по линии, соединяющей пункт возбуждения с точкой наблюдения. На фиг.1 и 2 обозначено участок работ 1, точки наблюдения 2 (сейсмоприемники), пункты возбуждения 3-5, проекции лучей волн 6-8 на горизонтальную плоскость, дуги окружностей 9, проведенные из пунктов возбуждения 3-5, точка наблюдения 10, совпадаю.щая с точкой пересечения дуг окружностей 9,поверхность наблюдений It,высоту 12 расположения источника, превьшение 13 источника над поверхностью .наблюдений, источник звука 14, луч 15 от источника звука до точки наблюдения JO, расстояние 14 между пунктом возбуждения 4 и точкой наблюдения 10. Способ осуществляют в следующей последовательности. На участке работ 1 с площадной расстановкой сейсмоприемников в точкак наблюдения 2 в пунктах возбуждения 3-5 ,находящихся на площади или вне ее, возбуждают сейсмические волны на поверхности наблюдений 11 Пункты возбуядения имеют известные координаты и превышения, т.е. привязаны к соответствующей топогеодезической сети с помощью известных технических средств, применяемых в любой сейсморазведочной партии (теодолит, нивелир, мерная лента). Возбуждение проводят при помо1Ди любых известных средств поочередно сначала в пункте возбуждения 3 и регистрируют сигналы всеми сейсмопр емниками, расставленными на площади, потом возбуждают волны в пункте определения и снова регистрируют всеми сейсмоприемниками и т.д.20 Затем возбуждают звуковые колебания в точках, имеющих в плане, те же координаты, что и пункты 3-5, однако .располагая их над поверхностью земли на заданной и точно известной вы- 25 соте. Возбуждение проводят также поочередно в каждом пункте возбуждения и регистрируют их всеми сейсмо-, приемниками на площади. Источниками звука могут быть воздушные взрывы, зо гармонические сигналы, хлопушки, свистки, выстрелы из различных устройств и т.п. Расположение источника звуковых волн на заданной высоте может быть осуществлено с помощью 35 шеста известной длины, например 1-5 м . Для увеличения высоты возбуждения звуковой источник может даже помещаться на воздушном шаре, заполненном легким газом, с фиксированной высотой подъе-40 и пу ма, ограниченной длиной удерживающего его щнура. Расположив дополнительные сейсмоприемники в пунктах возбуждения и регистрируя ими возбуждаемые колебания при известных координатах пунк тов возбуждения уточняют скорость зв ка в воздухе. После проведения указанных операций проводится определение (вычисление) местоположения всех точек наблю дения, расположенных на площади. При известной высоте- расположения источника от поверхности земли получается треугольник с углами в точке наблюдения 10, пункте возбуждения 4 на поверхности земли и точке расположения источника звука 14 в во для те уго гие ния опр где Г екци рлос 694 духе. Такие треугольники настроятся для каждой точки наблюдения не менее, чем для двух пунктов возбуждения. По известной скорости звука в воздухе и времени прихода, волны от пункта возбуждения 4 до точки наблюдения 10 вдоль поверхности наблюдений 11 можно определить расстояние 16 между этими точками. Таким же образом определяются все расстояния до каждой из точек наблюдений. По известной скорости звука в воздухе и времени прихода колебаний от источника звука 14 до точки наблюдения 10 определяется путь по лучу 15 всех треугольников. В результаычисляются три стороны всех треьников, а соответственно и друих элементы. ревьш1ение 13 точки наблюде10 над пунктом возбуждения 4 деляют по формуле «. Ь - превышение 13 точки наблюдения 10 над пунктом возбуждения 4; йС-, - расстояние 16 между пун Ктами возбуждения 4 и точкой наблюдения 10; эг. - луч 15 от источника звука 14 до точки наблюдения 10; Н - высота 12 расположения источника звука 14 над поверхностью наблюдений. оризонтальное расстояние по прои луча волны 7 на горизонтальную кость между точкой наблюдения 10 нктом возбуждения 4 вычисляется по формуле 1- ь где ЭЕг проекция луча волны 7 на горизонтальную плоскость. Превьш1ение 13 точки наблюдения и горизонтальное расстояние по проекции луча волны 7 вычисляются для всех треугольников, . По известным расстояниям в плане вдоль проекций лучей волн 6-8 методом засечек определяется местоположение всех точек наблюдения и наносится на соответствующую карту района работ. Это осуществляется следующим образом. Координаты точек определяются по известным расстояниям вдоль проекции лучей волны от пунктов возбуждения до всех точек наблюдения 2 сейсмоприемников на участке работ 1.
Величины превьвпений точек наблюдения используются для введения поправок за рельеф. Все эти вычисления могут быть автоматизированы как в полевых, так и в камеральных условиях.
Пример. При скорости звуковой вошш 333 м/с и при возбуткдении на поверхности наблюдений и на высоте 3 м от нее до точки приема и на расстоянии ТОО м между точками возбуящения и приема время прохождения волйы 0,300 с. Расстояние от точек расположения зарядов в пункте воэбуждеййЯ 4 до точки наблюдения 10 при использовании данного способа равно 99, W м.
При временах регистрации звуковой волны, распространяющейся из пункта возбуящения 5 в точку наблюдения 10, источником, расположенным на поверхности наблюденийjH источником, расположенным на высоте 3 м, составляющих соответственно 0,450 и 0,451 с, превышение, определенное по формуле (1), составит 15,15 м, а расстояние, вдоль проекции луча волны 8 равняется 148,08 м.
Пересечение дуг окружностей 9 с радиусами 99,84 ми 149,08 м, проведенными из пунктов возбуждения 4 и 5, позволяет определить положение точки наблюдения 10 в плане и в последующем определить ее координаты.
Полояительный эффект достигается тем,что значительно сокращается объем топогеодезических работ, так как в данном способе привязка осуществляется только для нескольких пунктов возбуждения, которые могут быть совмещены с пунктами, предназначенными для проведения профильных производственных работ, которые в любом случае топографически привязываются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ площадной сейсморазведки | 1990 |
|
SU1744658A1 |
| Способ площадной сейсморазведки | 1990 |
|
SU1728815A1 |
| Способ площадной сейсморазведки | 1990 |
|
SU1728816A1 |
| Способ пространственной сейсморазведки | 1981 |
|
SU1022091A1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ СЕЙСМОРАЗВЕДКИ | 1987 |
|
SU1441943A1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 2012 |
|
RU2490669C1 |
| Способ вертикального сейсмического профилирования | 1982 |
|
SU1056111A1 |
| Способ сейсморазведки | 1978 |
|
SU746367A1 |
| СПОСОБ СКВАЖИННО-НАЗЕМНОЙ СЕЙСМОРАЗВЕДКИ | 2024 |
|
RU2836846C1 |
| Способ сейсмической разведки | 1989 |
|
SU1728814A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТОЧЕК НАБЛЮДЕНИЯ ПРИ,СЕЙСМОРАЗВЕДКЕ, включающий излучение колебаний в пункте возбуждения с известными координатами, регистрацию колеJ.; Ш1 ЛМ&11лл баний в точках наблюдения и вычисление удалений точек наблюдения от пункта возбуждения в горизонтальной плоскости, о тлич ающийся тем, что, с целью повышения точности определения пространственного положения точек наблюдения, в пунктах возбуждения излучают звуковые колебания, используя при этом не менее , одного дополнительного пункта возбуждения с известными координатами, причем первоначально звуковые колебания излучают на поверхности наблюдения, а затем на известном удалении от нее по вертикали и определяют прег с: вьшение точек наблюдения над пунк(Л тами возбуждения, с учетом которых вычисляют удаление точек наблюдения от пунктов возбуждения. 4 О О О Ф 
/е
fO
It
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке 3374887/18-25, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3269296/18-25 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
