Изобретение относится к бурению, в частное ти к средствам измерения параметров траектории скважины. Известно глубинное устройство для цифровой записи параметров траектории скважины, содержащее датчики, подключенные к информа ционным входам первого коммутатора, выходы которого соединены с входом первого коммутатора, вькоды которого соединены с входом аналого-цифрового преобразователя (АЦП), а управляющие входы с первыми входами блока управления, первый вход которого подключен к первому выходу таймера, второй выход которого подключен к установочному входу счетчика адреса, счетный вход KOTjoporo соединен с вторым выходом блока управления, а выходы с адресными входами блока памяти, блок фиксации останова, второй коммутатор, элемент И, триггер, элемент запре та, сдвиговой регистр, вькод АЦП соединен с первыми информационными входа га второго коммутатора, вторые информационные входы которого подключены к третьим выходам таймера, а управляющие входы соединены с третьими выходами блока управления, второй вход которого подключен к блоку фиксации останова, а четвертый выход - к первому вхо ду элемента запрета, второй вход которого связан с выходом триггера, а первый вход которого подключен ко второму выходу таймера а второй вход через элемент И соешшен с соответствующими вьссодами счетчика адреса, управляющий вход блока памяти подключен к выходу элемента запрета, информационные входы - к выходам второго коммутатора, а выходы блока памяти через сдвиговый регистр подключены к выходу устройства. Блок фикса ции останова вьшолнен в виде последовательно включенных датчиков вибраций, усилителя, интегратЬра, порогового элемента, триггера и дафференцирующей цепи 1. Недостатком данного устройства является низкая точность построения траектории скважины, так как параметры измеряются в точках, а интервал между точками равен длине свечи и не изменяется. Кроме тйго, недостатком является низкая надежность привяэки точек измерения по глубине, так как блок фиксации останова может вьщавать лож ные сигналы в зависимости от характера движения колонны бурильных труб. Известна также автономная система для измерения параметров траектории скважины в процессе бурения, содержащая последователь но соединенные датчики, первый коммутатор, АЦП, второй коммутатор, второй вход которого соединен с выходом генератора тестовых команд, блок памяти, выход которого соединен с входом блока приема ипформа1ши, выход которого соединен с входом блока масшта-бирования, блок регистра1ши, блок визуальной индикации и блок управления записью, выход которого, соединен с входом первого и второго коммутаторов таймер и блок памяти 21. Недостатками известной системы являются низкая точность построения траектории скважины, так как в связи с чем измерение производится в точках, а интервал между точками измерения равняется длине свечи и низкая достоверность измерений, так как параметр в данной точке скважины измеряется один раз и возможно ошибочное измерение. Кроме того, недостатком является низкая надежность привязки точек измерения по глубине - блок управления записью, содержащий сейсмодагтик, может выдавать команду на измерение или запрет, не исключается возможность пропуска точек Измерения по скважине. Цоль изобретения - повышение точности траектории скважины и надежности системы за счет более точной привязки {эезультатов измерения по глубине скважины. Поставленная цель достигается тем, что автономная система для измерения параметров траектории скважины в процессе бурения, содержащая последовательно соединенные датчики, первый коммутатор, аналого-цифровой преобразователь, второй коммутатор, второй вход которого .соединен с выходом генератора тестовых команд, блок памяти, выход которого соединен с входом блока приема информации, выход которого соединен с входомблока масштабирования, блок регистрации, блок визуальной индикации и блок управления записью, выход которого соединен с входом первого и второго коммутаторов, таймер и блок памяти, снабжена блоком осреднения сигналов, блоком программирования времени и количества циклов измерения и блоком щюграммирования сигнала записи по глубине, дополнительным таймером, блокЪм памяти, блоком управления приемом информации, блоком меток, при этом выход блока программн рования сигнала записи по глубине соединен с блоком управления приемом информации, один из выходов последнего соединен с входом блока осреднения, другой вход которого подключен к коммутатору, а его выход соеданен с входом блока памяти, причем вход дополнительного таймера соединен с входом блока масщтабирования, выход дополнительного таймера соединен с входом блока программирования сигнала записи по глубине, выход ко.торого соединен с входом блока управления приемом информации, выход которого соединен с вторым входом блока приема информаоди. Ha чертеже приведена функщюмальная схем системы. Система состоит из автономного скважинног прибора и наземного устройства, кроме того, она содержит датчики 1, коммутатор 2, АЦП коммутатор 4, блок 5 осреднения, блок 6 памяти, блок 7 управления записью, блок 8 программирования времени и количества циклов измерений , таймер 9, блок 10 приема информации, блок 11 масштабирования, блок 12 памяти, блок 13 регист;)ации, блок 14 визуальной индикации, блок 15 формирования меток глубин (БМГ), генератор 16 тестовых команд, блок 17 управления приема информа ции, Рлок 18 программирования сигнала на за пись по глубине, таймер 19. Система работает следующим образом. Система приводится в рабочее состояние, так как в устройствах программируемых скважинного прибора и наземного устройства задана необходимая программа измер гния; синхронно включены таймеры. СкважинньЕЙ прибор сброшен в скважину и зафиксирован в немагнитной бурильной трубе. В процессе подъема колонны бурильных труб согласно з данной программе блок управления выдает команду, по которой коммутатор 2 поочередн подключает датчики 1 и подает на вход АЦП 3, в котором сигналы с датчиков преобразуются в цифровой код и поступают на вход блока 5 осреднения. В устройстве программируемом задан интервал времени, за кото рый происходит осреднение результатов измер ния. Этот интервал времени соответствует некоторому интервалу участка скважины. Сигнал времени поступает с таймера 9, согласно этому сигналу устройство программируемое формирует границы интервала и : порядковый номер измерения выдает сигнал в блок 7 управления записью, который вьщает команду на запись результата из блока i осреднения в блок 6 памяти. .Измерение производится как при движении колонны, так и при остановах. Это возможно за счет применения феррозондового датчика азимута и син сно-косинусного трансформатора в качестве преобразователя зенитного угла и датчика угла отклонителя, а также применения поплав ковой конструкции, заполненной вязкой жидкостью. Устройство программируемое может работать по нескольким программам. Каж дая программа управляет работой схемы в на наченном диапазоне времени с заданным интер валом времени осреднения. Это позволяет изменять интервал осреднения на различных . участках скважины. Необходимость наличия нескольких программ видна из следующего примера. Пусть параметры траектории скважины измеряются во второй раз с глубины . 2000 м. Первое измерение было произведено с глубины 1500 м. После первого измерения пробурено 500 м, которые необходимо проверить с минимально возможным интервалом осреднения. Учтем, что объем блока памяти скважинного прибора ограничен, например, до ста точек для записи параметров в 100 точках. Распределять объем памяти равномерно для записи информации по всей длиие скважины нет смысла, большую часть вьзделим на запись информации с последних 500 м скважины. Зная среднюю скорость подьема колони (допустим 10 м/мин) вычисляем диапазон времени-для первой программы Т( - 500 10-50 мин, соответственно назначаем интервал времени осреднения Т, - 50 мни : 80 - 5/8 мин, который соответствует среднему интервалу по длине 500:8 - 6,2 м. Полное время/ подъема. составляет 2000 м : 10 м/мин - 200 мин. Для второй программы диапазон времени Tj - 200 мин-50 мин - 150 мим, отсюда интервал времени осреднения 150 мин : : 20 точек - 7,5 мин, что соответствует среднему интервалу по участку скважины 1500 м 520 - 75 м. Вторая программа и соответстввенно второй диапазон времени являются резервными и контрольными и могут использоваться для сравнения с результатами измерения, проведенными в первый раз. Наземное устройство работает следующим образом. Блок программирования сигнала на запись по глубине 18 согласно заданной программе выдает сигнал в блок 17 управления приема информации, который вырабатывает команду на запись в блок 12 памяти порядкового номеipa интервала измерения и кода глубины,,поступающего с БМГ 15. После извлечения на поверхность скважинный прибор присоединяется к наземному устр жству. По команде блока 17 управления приема памяти чере блок 10 приема информаш1И и блок 11 масштабирования из блока памяти скважинного прибора подается блок 14 визуальной индикации и блок 13 регистрации параллельно из блока 12 памяти информация отлубине соответствующего интервала измерения. Генератор 16 тестовых команд предназиачен для проверки функционирования всей системы перед началом измерений . Предлагаемое устройство по сравнению с известным обладает повышенной точностью построения траектории скважины.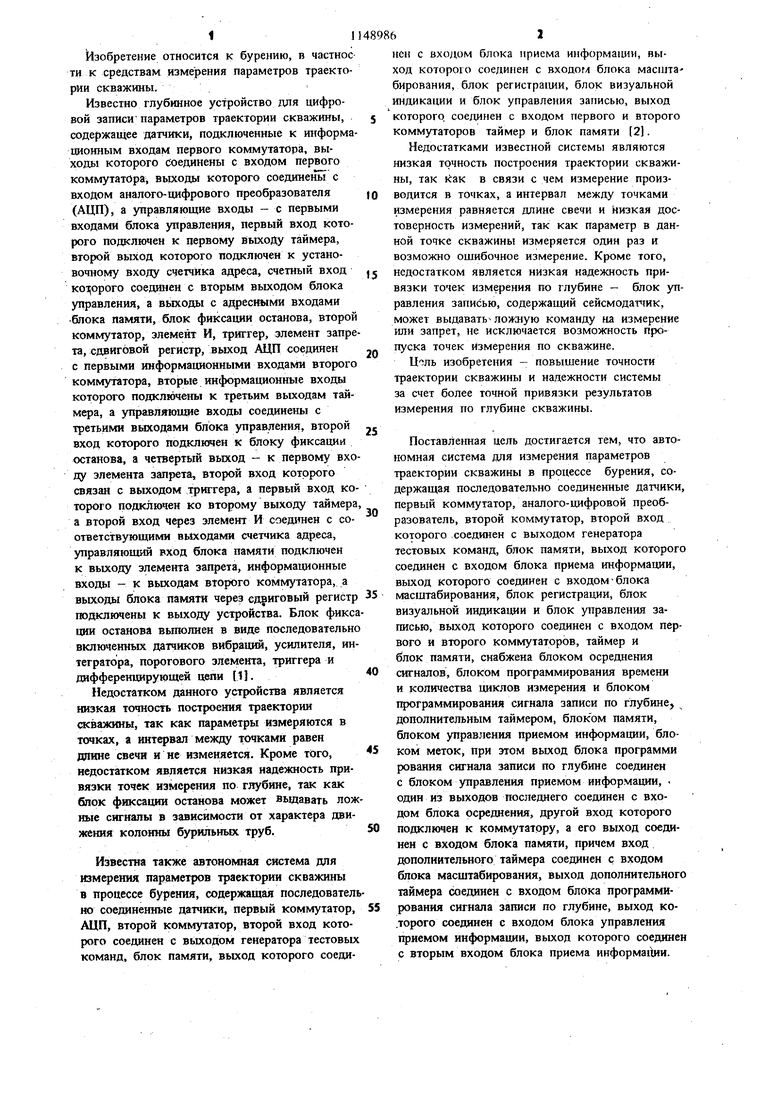
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономная система для измерения параметров траектории скважин | 1983 |
|
SU1160018A1 |
| Устройство для измерения и регистрации параметров скважин | 1987 |
|
SU1483463A1 |
| Инклинометр | 1982 |
|
SU1078040A1 |
| Автономная система для определения параметров траектории скважины | 1980 |
|
SU941558A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Глубинное устройство для определения параметров траектории скважины | 1981 |
|
SU996726A1 |
| Глубинное устройство для цифровой записи параметров траектории скважины | 1980 |
|
SU903565A1 |
| Автономный инклинометр | 1983 |
|
SU1146425A1 |
| Устройство для контроля комплекса параметров искривления скважин | 1984 |
|
SU1208208A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |

АВТОНОМНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ В ПГОЦЕССЕ БУРЕНИЯ, содержащая последовательно соединенные датчики, первый коммутатор, аналого-цифровой преобразователь, второй коммутатор, второй вход которого соединен с выходом генератора тестовых команд, блок памяти, выход которого соединен с входом блока приема информации, выход которого соединен с входом блока масштабирования, блок регистрации, блок визуальной иняикации и блок управления записью, выход которого соединен с входом первого и второго коммутатора, таймер и блок памяти, о т л ичающая
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Глубинное устройство для цифровой записи параметров траектории скважины | 1980 |
|
SU903565A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автономная система для определения параметров траектории скважины | 1980 |
|
SU941558A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
