Изобретение относится к телемеханике и предназначено для телемеханизации объектов, удаленных от диспетчерского пункта на значительное расстояние.
Известны устройства телемеханики, основанные на использовании параллельно-последовательного кодирования сообщений и декодирования их многотактными релейными блоками (конечными автоматами). Эти устройства содержат кодирующее устройство, выходы которого подаются на распределители каналов диспетчерского и контролируемого пунктов. Выходы распределителей, выполненных в виде декодирующих ячеек-автоматов, через логические схемы совпадения соединяются на диспетчерском пункте с ключами управления, с элементами памяти каналов телесигнализации и телеизмерения, а на контролируемых пунктах - с элементами памяти каналов телеуправления, с дат-чиками телесигнализации и передающим блоком телеизмерения. Диспетчерский и контролируемый пункты связ.аны между собой линией связи, содержащей адресные и информационные щины 1.
Известные устройства требуют значительного числа адресных шин в линии связи и являются конструктивно сложными.
Наиболее близким к предлагаемому по технической сущности является система телемеханики, содержащая на диспетчерском пункте генератор импульсов, выход которого подключен к первому входу управляемого делителя частоты, выход которого соединен с входом блока кодирования, выходы блока кодирования через передатчик подключены к первой линии связи, ключи управления, выходы которых соединены с первыми входами первого блока элементов И, распределитель адресов, входы которого подключены к соответствующим выходам блока кодирования, выходы регистра соединены с соответствующими первыми входами первого блока памяти и с вторыми входами первого бло ка элементов И, выходы первого блока памяти подключены к соответствующим индикаторам, вторая линия связи соединена с входом приемника, на каждом контролируемом пункте первая линия связи подключена к входу приемника, выходы распределителя адресов соединены с соответствующими первыми входами первых дискриминаторов и элементов И, выходы которых через контакты датчиков подключены к первому входу первого элемента ИЛИ, выходы дискриминаторов соединены с соответствующими входами блока памяти и с вторыми входами эл ементов И, выход первого элемента ИЛИ через передатчик подключен к второй линии связи 2.
Однако в этой системе распределитель адресов на контролируемом пункте подключен непосредственно к выходам приемника, а на диспетчерском пункте выход приемника
также соединен непосредственно с элементами И каналов телесигнализации и телеизмерения, что отрицательно сказывается на помехозащищенности и надежности передачи информации. Кроме того, в известном устройстве отсутствуют средства для повышения достоверности передаваемой информации, в особенности команд телеуправления, передаваемых на большое расстояние.
Цель изобретения - повышение достоверности передачи сигналов.
Поставленная цель достигается тем, что в систему телемеханики, содержащую на диспетчерском пункте генератор импульсов, выход которого подключен к первому входу управляемого делителя частоты, выход которого соединен с входом блока кодирования, выходы блока кодирования через передатчик подключены к первой линии связи, ключи управления, выходы которых соединены с первыми входами первого блока элементов И, распределитель адресов, входы которого подключены к соответствующим выходам блока кодирования, выходы регистра соединены с соответствующими первыми входами первого блока памятии с вторыми входами первого блока элементов И, выходы первого блока памяти подключены к соответствующим индикаторам, вторая линия связи соединена с входом приемника, на каждом контролируемом пункте первая линия связи подключена к входу приемника, выходы распределителя адресов соединены с соответствующими первыми входами первых дискриминаторов и элементов И, выходы которых через контакты датчиков подключены к первому входу первого элемента ИЛИ, выходы первых дискриминаторов соединены с соответствующими входами блока памяти и с вторыми входами элементов И, выход первого элемента ИЛИ через передатчик подключен к второй линии связи, на диспетчерском пункте введены блок интеграторов, второй блок элементов И, элемент ИЛИ, формирователь строб-импульсов и второй блок памяти, выход приемника соединен с входом блока интеграторов, выходы которого подключены к соответствующим вторым входам первого и второго блоков памяти, выходы первого и второго блоков элементов И соединены с входами элемента ИЛИ, выход которого соединен с вторым входом управляемого делителя частоты и с первым входом формирователя строб-импульсов, второй вход которого подключен к выходу генератора импульсов, третий вход соединен с выходом управляемого делителя частоты, первый выход формирователя строб-импульсов подключен к первым входам второго блока памяти, второй выход формирователя строб-импульсов соединен с третьим входом первого блока памяти, выходы распределителя адреса подключены к соответствующим вторым входам второго блока памяти, выходы которого соединены с соответствующими индикаторами, на приемной стороне введены блоки интеграторов, вторые дискриминаторы, элементы ИЛИ и блок инверторов, выходы приемника через блоки интеграторов подключены к соответствующим входам распределителя адресов, а через вторые дискриминаторы - к входам второго элемента ИЛИ, выход которого соединен с управляющими входами блока памяти, выходы первых дискриминаторов через блок инверторов подключен к входам третьего элемента ИЛИ,, выход которого соединен с вторым входом первого элемента ИЛИ.
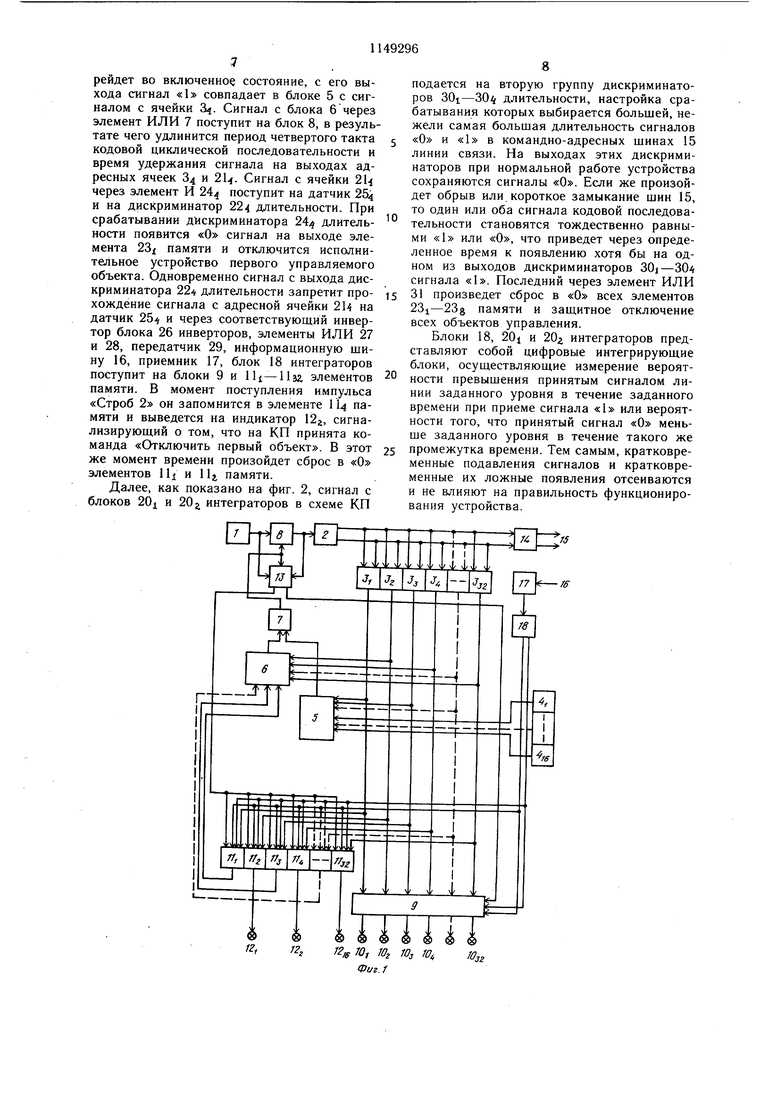
На фиг. 1 показана схема диспетчерского пункта; на фиг. 2 - схема контролируемого пункта.
Устройство телемеханики содержит на диспетчерском пункте генератор 1 импульсов, блок 2 кодирования, распределитель 3 адресов, ключи 4i-4ter первый блок 5 элементов И, второй блок 6 элементов И, элемент ИЛИ 7, управляемый делитель 8 частоты, первый блок 9 памяти, индикаторы lOj - 10з2, второй блок llj - И32 памяти, индикаторы 12i и 12г, формирователь 13 строб-импульсов сигналов, передатчик 14, первую 15 и вторую 16 линии связи, приемник 17, блок 18 интеграторов. На контролируемом пункте устройство содержит приемник 19, блоки 20i-202 интеграторов, распределитель 21 -21S2 адресов, первые дискриминаторы 22 -22з2 , блок 23 памяти (элементы 23j-23s), элементы И , контакты датчиков ТС 25i-25ja , блок 26 инверторов, элемент 27 ИЛИ, элемент 28 ИЛИ, передатчик 29, вторые дискриминаторы , элемент 31 ИЛИ.
Устройство работает следующим образом.
Поступающие с генератора 1 импульсов тактовые импульсы блок 2 кодирования на ДП преобразует, например, в 32-разрядную циклическую последовательность элементов комбинирования, состоящих из символов «О и «1, где под «О и «1 могут пониматься различные уровни напряжений.
На эти кодовые комбинации реагируют ячейки распределителей , и 21,-21з2 адресов на ДП и КП, которые представляют собой последовательностные машины (конечные автоматы).
Предположим, что отключены все ключи , управления, все объекты на КП также отключены. В этом случае на выходах блоков 5 и 6, на выходе элемента ИЛИ 7 и на управляющем входе блока 8 будут нулевые сигналы, т.е. команда на удлинение периода не поступает и блок 2 кодирования формирует циклическую кодовую последовательность без удлинения букв (тактов) кодовых комбинаций.
При этом состояние элементов памяти в блоке 9 и состояние индикаторов 10 -lOja отображает состояние датчиков телесигнализации на контролируемом пункте, а все элементы 1 IJL - ПЗЕ памяти и индикаторы 12 - 12jg отключены, что определяется сигналами, приходящими с КП, с ячеек распределителя адресов объектов и схемы, формирования стробирующих импульсов 13 диспетчерского пункта.
Циклическая кодовая последовательность, например в следующем виде 00-10- 11 - 10-11 - 10-00-10-00-10-11-01 - -11 -10-11-01-00-01 -11-Ois 00-10-00-01 - 11 - 10-00-01-00-01, через передатчик 14 по адресным щинам поступает на КП, а с него по обратной информационной шине 16 на приемник 17 поступают ответные сигналы, которые обрабатываются блоком 18 интеграторов. Прямое и
0 инверсное значение принятых сигналов подается с блока 18 интегрального приема на блоки 9 и 11 -1152 элементов памяти.
На контролируемом пункте сигналы кодовой последовательности поступают на
5 приемник 19 и затем обрабатываются блоками 20 и 202 интеграторов, которые ликвидируют искажения сигнала помехами в лини.ч связи. Далее эти сигналы поступают на ячейки распределителя 21. адреса объектов, каждая из которых реагирует на
0 соответствующую ей кодовую комбинацию. Зате.м сигналы с ячеек распределителя адреса объектов поступают на дискриминаторы 22);-22з2 длительности, на выходах которых не будет изменения сигналов с «1 на «О, так как отключены ключи уп5 равления на ДП и, следовательно, нет удлиненных тактов кодовых комбинаций. Одновременно сигналы с распределителя jj поступают на элементы И , на другие входы которых подключены выходы дискриминаторов 22 -22j2- На датчики 25х- 25зг состояния объектов сигналы поступают с выходов элементов И 24 -24зг. .Кроме того, выходы дискриминаторов длительности сигналов подаются через блок 26 инверторов на входы первого элемента
ИЛИ 27. Предположим, что датчик 25 замкнут. В этом случае сигнал с ячейки распределителя 21 адресов через элемент ИЛИ 28, передатчик 29 поступает в информационную тину линии 16 связи и далее на
Q прие.мник 17 диспетчерского пункта. Принятый информационный сигнал обрабатывается блоком 18 интегрального приема диспетчерского пункта и поступает на блок 9 памяти. На перво.м элементе памяти этого блока принятый сигнал совпадает с сигналом,
5 поступающим с ячейки 3 распределителя адресов объектов и со стробирующим импульсом «Строб 1 с формирователя 13 стробирующих импульсов. В результате этого первый элемент памяти блока 9 переходит во включенное состояние, а на индикаторе lOi высвечивается замкнутое состояние датчика 25i. В элемент llj памяти эта информация не записывается, так как со схемы формирования стробирующих импульсов 13 при отсутствии команды на удлинение первого тактового импульса стробирующий импульс «Строб 2, необходимый для записи информации в блок llj.- Пзг элементов памяти, не поступает. Аналогичным образом проходят сигналы, характеризующие состояния и других датчиков 25д-25 jj контролируемого пункта. Предположим, что все датчики 25j-2632 контролируемого пункта разомкнуты, а на ДП замыкается ключ 4 управления на включение первого объекта. При совпадении сигналов с ключа 4 и ячейки 3± распределителя команда /правления через блок элементов И 5, элемент ИЛИ 7 подается на блок 8 управляемых делителей частоты. В результате этого на выходе блока 2 кодирования сигнал, соответствующий тактовой позиции первого элемента регистра 3j, удлиняется на заданное время, а на выходах ячеек 3i и 21j распределителей ДП и КП сигнал «1 будет присутствовать в течение этого удлиненного времени. Поэтому в первую половину времени удержания удлиненного сигнала на выходе адресной ячейки 21 он проходит через элемент И 24 на датчик 25i, так как в течение этого времени на выходе дискриминатора длительности 22 продолжает сохраняться сигнал «1. После срабатывания дискриминатора 22 на его выходе появляется сигнал «О, в результате чего на выходе элемента И 241 сигнал «1 снимается, но одновременно через первый инвертор блока 26, первый и второй элементы ИЛИ 27 и 28 сигнал «О с дискриминатора 22i длительности поступает на передатчик 29 и далее по линии 16 связи - на приемник 17 диспетчерского пункта. Наконец, с блока 18 интегрального приема он поступает на элемент 11 памяти, где, совпадая с сигналом -адресной ячейки 3 и стробирующим импульсом «Строб 2 формирователя 13 стробирующих импульсов, запоминается. Таким образом, в течение одного удлиненного такта циклической кодовой последовательности осуществлен контроль состояния датчика 25i телесигнализации, передана информация на КП о необходимости отключения первого объекта управления и на ДП получена информация о том, что КП принял команду на включение первого объек та, хотя включение самого объекта еще не произощло, а лишь нулевым сигналом с дискриминатора 22i подготовлен для включения на КП элемент 23 памяти. Далее сигнал с элемента llj памяти на ДП подается в блок элементов И 6, где, складываясь с выходным сигналом следующей ячейки регистра За адресов объектов, проходит на элемент ИЛИ 7 и блок 8 управляемых делителей частоты, удлиняя тем самым и последующий такт циклической кодовой последовательности. Вследствие этого на выходе адресной ячейки 2Ц распределителя адресов объектов на КП сигнал будет также удлиненным, вследствие чего сигналом с дискриминатора 222, включится элемент 23j памяти первого управляемого объекта и его выходной элемент. Аналогичным образом в течение первой половины длительности второго такта произойдет контроль состояния датчика 24g, а в течение второй половины длительности такта через второй инвертор блока 26, первый и второй элементы ИЛИ 27 и 28 на ДП будет передана информация о том, что на КП принята и окончательно подана команда на включение первого объекта. Последняя информация на ДП поступает в элемент 11ц памяти и далее на индикатор 12, сигнализирующий об окончательном и правильном прохождении команды на включение первого объекта. Независимо от этого датчик состояния первого объекта управления может быть подключен к выходу одного из элементов И 24i-24ji, чем будет обеспечиваться дополнительный контроль его состояния. Описанное прохождение команд управления и информации об их приеме на КП представляет собой решающую обратную связь, обеспечивающую значительное повышение достоверности передаваемой информации. Для отключения первого объекта нужно замкнуть ключ 4j, управления. Сигнал с ключа 42 поступит на блок элементов И 5 и при совпадении с сигналом с адресной ячейки 3 через элемент ИЛИ 7 - на блок 8 управляемых делителей частоты. При этом удлинится период третьей кодовой комбинации и сигналы на выходах адресных ячеек Зз и 21J на ДП и КП. С выхода ячейки 21з сигнал пройдет через элемент ИЛИ 24з на датчик 25, и на дискриминатор 22 длительности. При срабатывании дискриминатора 22з длительности сигнал с его выхода запретит прохождение сигнала с ячейки 21 на датчик 25 и, поступив на элемент 23j памяти, подготовит его к сбросу. Так же этот сигнал через третий инвертор блока 26 инверторов, элемент ИЛИ 27 и 28, передатчик 29, информационную шину 16, приемник 17, блок 18 интеграторов поступит на блоки 9 и llj - Ilj2 элементов памяти. В момент поступления в формирователь 13 стробирующих импульсов импульса «Строб 2 произойдет подготовка к сбросу элементов 11д -1Ц памяти, а элемент Из памяти перейдет во включенное состояние, с его выхода сигнал «1 совпадает в блоке 5 с сигналом с ячейки З. Сигнал с блока б через элемент ИЛИ 7 поступит на блок 8, в результате чего удлинится период четвертого такта кодовой циклической последовательности и время удержания сигнала на выходах адресных ячеек 34 и 2U. Сигнал с ячейки 21-1 через элемент И 24 поступит на датчик 25 и на дискриминатор 224 длительности. При срабатывании дискриминатора 24 длительности появится «О сигнал на выходе элемента 23 памяти и отключится исполнительное устройство первого управляемого объекта. Одновременно сигнал с выхода дискриминатора 22-i длительности запретит прохождение сигнала с адресной ячейки 2U на датчик 25 и через соответствующий инвертор блока 26 инверторов, элементы ИЛИ 27 и 28, передатчик 29, информационную шину 16, приемник 17, блок 18 интеграторов поступит на блоки 9 и . элементов памяти. В момент поступления импульса «Строб 2 он запомнится в элементе lU памяти и выведется на индикатор 12г, сигнализирующий о том, что на КП принята команда «Отключить первый объект. В этот же момент времени произойдет сброс в «О элементов П и llj памяти.
Далее, как показано на фиг. 2, сигнал с блоков 20i и 20 г интеграторов в схеме КП
подается на вторую группу дискриминаторов 30i-30 длительности, настройка срабатывания которых выбирается больщей, нежели самая большая длительность сигналов «О и «Ь в командно-адресных щинах 15 линии связи. На выходах этих дискриминаторов при нормальной работе устройств а сохраняются сигналы «О. Если же произойдет обрыв или. короткое замыкание шин 15, то один или оба сигнала кодовой последовательности становятся тождественно равными «1 или «О, что приведет через определенное время к появлению хотя бы на одном из выходов дискриминаторов 30i-30 сигнала «Ь. Последний через элемент ИЛИ 3 произведет сброс в «О всех элементов 23i-23g памяти и защитное отключение всех объектов управления.
Блоки 18, 20i и 20г. интеграторов представляют собой цифровые интегрирующие блоки, осуществляющие измерение вероятности превышения принятым сигналом линии заданного уровня в течение заданного времени при приеме сигнала «Ь или вероятности того, что принятый сигнал «О меньше заданного уровня в течение такого же промежутка времени. Тем самым, кратковременные подавления сигналов и кратковременные их ложные появления отсеиваются и не влияют на правильность функционирования устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики для рассредоточенных объектов | 1975 |
|
SU556477A1 |
| Устройство для телеуправления иТЕлЕСигНАлизАции пО СилОВыМРАСпРЕдЕлиТЕльНыМ СЕТяМ | 1979 |
|
SU824261A1 |
| Система магистральной телемеханики | 1977 |
|
SU693421A1 |
| Устройство для телесигнализации с временным разделением сигналов | 1978 |
|
SU734788A1 |
| Устройство для сбора и передачи информации | 1973 |
|
SU519752A2 |
| Устройство для телеконтроля | 1990 |
|
SU1732366A1 |
| УСТРОЙСТВО ТЕЛЕИЗМЕРЕНИЯ ДЛЯ РАССРЕДОТОЧЕННЫ | 1973 |
|
SU386423A1 |
| Устройство для сбора и передачииНфОРМАции | 1977 |
|
SU678974A1 |
| УСТРОЙСТВО для ТЕЛЕИЗМЕРЕНИЯ | 1972 |
|
SU337799A1 |
| ВПТ5 Щ тШп^^:^ | 1973 |
|
SU408363A1 |

СИСТЕМА ТЕЛЕМЕХАНИКИ, содержащая на диспетчерском пункте генератор импульсов, выход которого подключен к первому входу управляемого делителя частоты, выход которого соединен с входом блока кодирования, выходы блока кодирования через передатчик подключены к первой линии связи, ключи управления, выходы которых соединены с первыми входами первого блока элементов И, распределитель адресов, входы которого подключены к соответствующим выходам блока кодирования, выходы регистра соединены с соответствующими первыми входами первого блока памяти и с вторыми входами первого блока элементов И, выходы первого блока памяти подключены к соответствующим индикаторам, вторая линия связи соединена с входом приемника, на каждом контролируемом пункте первая линия связи подключена к входу приемника, выходы распределителя адресов соединены с соответствующими первыми входами первых дискриминаторов и элементов И, выходы которых через контакты датчиков подключены к первому входу первого элемента ИЛИ, выходы первых дискриминаторов соединены с соответствующими входами блока памяти и с вторыми входами элементов И, выход первого элемента ИЛИ через передатчик подключен к второй линии связи, отличающаяся тем, что, с целью повыщения достоверности передачи сигналов, в устройство на диспетчерском пункте введены блок интеграторов, второй блок элементов И, элемент ИЛИ, формирователь строб-импульсов и второй блок памяти, выход приемника соединен с входом блока интеграторов, выходы которого подключены к соответствующим вторым входам, первого и второго блоков памяти, выходы первого и второго блоков элементов И соединены с входами элемента ИЛИ, выход которого соединен с вторым i входом управляемого делителя частоты и с первым входом формирователя строб-импуль(Л сов, второй вход которого подключен к выходу генератора импульсов, третий вход соединен с выходом управляемого делителя частоты, первый выход формирователя стробимпульсов подключен к первым входам второго блока памяти, второй выход формирователя строб-импульсов соединен с третьим входом первого блока памяти, выходы распределителя адреса подключены к соответствующим вторым входам второго блока 4 памяти, выходы которого соединены с соотСО ьо ветствующими индикаторами, на приемной стороне введены блоки интеграторов, втосо рые дискриминаторы, элементы ИЛИ и блок О5 инверторов, выходы приемника через блоки интеграторов подключены к соответствующим входам распределителя адресов, а через вторые дискриминаторы - к входам второго элемента ИЛИ, выход которого соединен с управляющими входами блока памяти, выходы первых дискриминаторов через блок инверторов подключены к входам третьего элемента ИЛИ, выход которого соединен с вторым входом первого элемента ИЛИ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КОМПЛЕКСНОЕ ТЕЛЕМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РАССРЕДОТОЧЕННЫХ ОБЪЕКТОВ | 1972 |
|
SU428437A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система телемеханики для рассредоточенных объектов | 1975 |
|
SU556477A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
