Изобретение относится к электромашиностроению, а именно к устройст вам yjEyiiueHHH коммутация коллекторны электрических машин путем настройки дополнительных полюсов на середину области безыскровой работы, и может быть использовано при разработке автоматических устройств, обеспечивающих оптимальные условия коммутации электрических машин. Известны устройства улучшения коммутации, основанные на изменении тока дополнительных полюсов СО. Функциональные возможности известных устройств ограничены необходимостью установки тока подпитки в каждом конкретном случае при испытании, возможностью использования толь ко при настройке коммутации после изготовления машины. Кроме того, данные устройства характеризуются сложностью автоматизации процесса настройки. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство улучшения коммутации коллекторных электрических машин, содержащее управляемый усил.итель, подключенный к обмотке дополнительных полюсов, датчик то ка коммутируемой секции, выполненный в виде вспомогательной секции, уложенной рядом с основной секцией обмотки якоря С2 1. Недостатки известного устройства низкие точность и помехозащищенность Целью изобретения является повышение точности автоматической настро ки коммутации на середину области безыскровой работы коллекторной электрической машины и помехозащищенности. Указанная цель достигается тем, что устройство, содержащее управляемый усилитель с выводами для подключения к обмотке дополнительных полюсов, датчик тока коммутируемой секции, выполненный в виде вспомогатель ной секции, предназначенной для укладки рядом с основной секцией обмотки якоря, снабжено блоком интегрирования, узлом формирования импуль сов (УФИ), выполненным в виде последовательно включенных дискретного датчика угла поворота и трех одновиб раторов, узлом формирования сигнала модели (УФСМ) желаемого Хс1рактера коммутации, выполненным из включенны 772 последовательно блока памяти, управляемого блока интегрирования, блока сравнения, второго блока интегрирояания, датчиком периода коммутации с включенным последовательно вторым блоком памяти, а также вторым блоком сравнения и третьим блоком памяти, при этом выход датчика тока коммутируемой секции подключен к информационным входам первого блока памяти УФСМ и первого блока интегрирования, обнуляющий вход которого объединен с обнуляющими входами управляемого блока интегрирования УФСМ, второго блока интегрирования того же узла и подключен к выходу второго одновибратора УФИ, выход третьего одновибратора соединен с обнуляющим входом датчика периода коммутации, выход первого одновибратора подключен к об71единенным входам переписи первого, второго и третьего блоков памяти, выход второго из них Соединен с управляющим входом управляемого блока интегрирования, информационный вход которого подключен к второму входу первого блока сравнения, информационный вход третьего бцока памяти соединен с выходом второго блока сравнения, первый вход которого подключен к выходу второго блока интегрирования, а второй вход второго блока сравнения соединен с выходом первого блока интегрирования, выход же третьего блока памяти через управляемый усилитель подключен к обмотке дополнительных полюсов. На фиг. 1 показаны различные формы изменения тока в коммутируемой секции (кривая 1 соответствует изменению тока секции при прямолинейной (безыскровой) коммутации, кривая 2 замедленной коммутации, кривая 3 ускоренной); на фиг.2 и 3 - формиро- . ванне сигнала, моделирующего прямолинейный закон коммутации при изменении тока якоря и частоты вращения мащины; на фиг.4 - функциональная схема устройства; на фиг.5 - упрощенная электрическая схема элементов устройства. Линейно изменяющийся электрический игнал, моделирующий прямолинейный акон коммутации, задается с постояным коэффициентом наклона. Очевидно, то линейно изменяющийся сигнал (криая 1 на фиг. 1) с постоянным коэфициентом наклона может служить моделью прямолинейного закона коммутации только при постоянном значении периода коммутации, т.е. при постоянной частоте вращения машины и при постоянной величине тока якоря (или пропорциональной ему величине i« тока параллельной ветви). При изменении частоты вращения прямая с неизменным коэффициентом наклона может значительно отличаться от зависимости, соответствующей прямолинейному закону коммутации. Кроме того, ошибка в моделировании прямолинейног закона коммутации в известном способ появляется и при изменении тока якоря (т.е. и величины тока параллельно ветви ig). Таким образом, вследствие того, что в известном способе модель прямолинейного характера коммутации задается без учета текущих значений тока якоря машины и периода коммутации, точную настройку коммутации можно обеспечить только при постоянной величине тока якоря и неизменной частоте вращения. При изменении указанных величин будет возникать значительная ошибка в настройке коммутации на середину области безыскровой работы машины..
При управлении процессом коммутации в течение периода коммутации Т| (фиг.1) осуществляется интегрирование в функции времени сигнала, пропорционального действительному значению тока коммутируемой секции (кривая 2 или 3), и сигнала, моделирующего прямолинейный характер коммутации (кривая 1), а сигнал ошибки, в функции которого осуществляется изменение тока дополнительных полюсов, формируется в результате сравнения интегральных значений сигналов за период коммутации. При этом сигнал ошибки пропорционален площади (области), заключенный между кривой 2 (или 3) и кривой 1 (фиг.1), и его модуль и знак характеризуют интег ральное отклонение действительного процесса коммутации от желаемого прямолинейного. Благодаря тому, что осуществляется измерение интегрального отклонения за период коммутации, высокочастотные помехи, наложенные на кривую, характеризующую действительный процесс коммутации, в значительной степени отфильтровываются. Это обстоятельство обеспечивает высокую помехозащищенность
при управлении процессом коммутации .
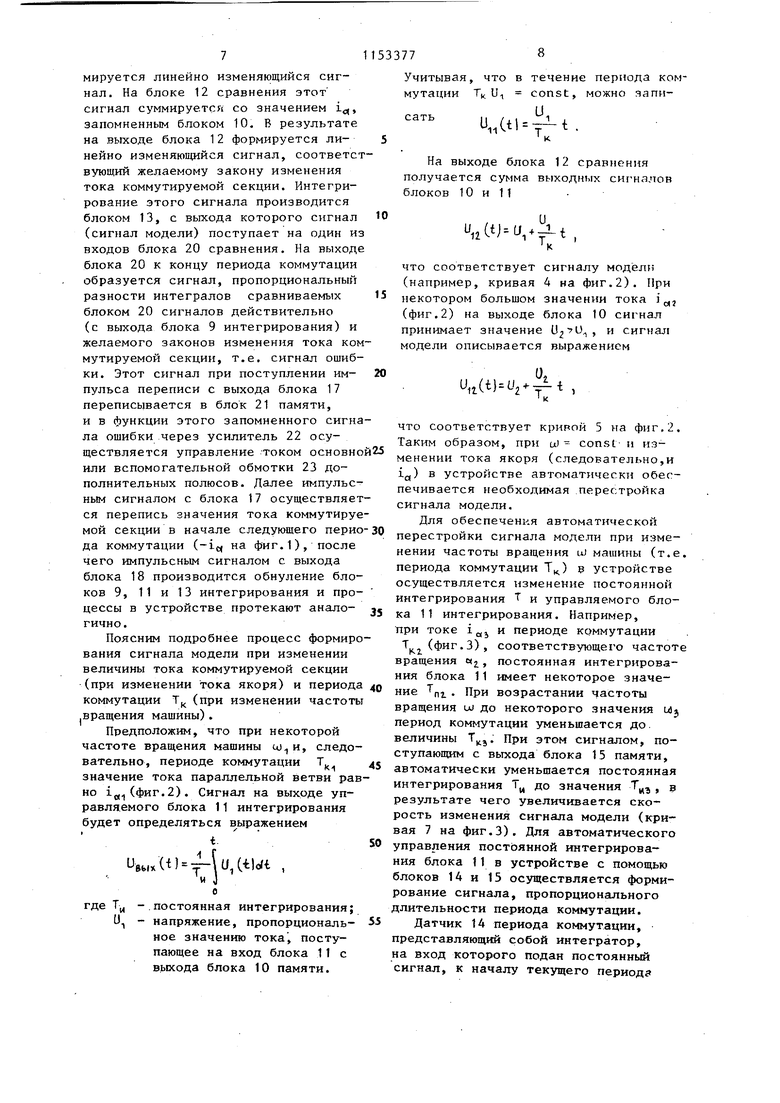
Кроме того, моделирование прямолинейного характера коммутации осуществляют с учетом значения тока коммутируемой секции (или пропорционального ему тока якоря) и с учетом текущего значения частоты вращения машины. При постоянной частоте вращения машина (а, следова.тельно, постоянном значении периода коммутации Т) наклон моделирующей кривой изменяют пропорционально текущему значению тока секции, т.е.
и тока параллельной ветви i (фиг.2). Так, если при некотором значении тока 1д сигнал, моделирующий желаемый (например, прямолинейный) характер коммутации, имеет вид кривой 4,
то при возрастании тока секции до
значения ij наклон моделирующей кривой (скорость изменения сигнала) увеличивают (кривая 5). При изменении частоты вращения машины, а следовательно, и периода коммутации 7 , скорость изменения сигнала, моделирующего желаемый характер коммутации, изменяют пропорционально изменению частоты вращения машины. При некоторой частоте вращения машины период коммутации равен (r.3), и моделирующий сигнал имеет вид кривой 6. При возрастании частоты вращения период коммутации уменьшится: до некоторого значения , и наклон моделирующей кривой увеличивают пропорционально изменению частоты вращения машины (кривая 7).
Возможность существенного повышения точности настройки дополнительных полюсов машшы может быть пояснена на следующем примере.
Предположим, при некотором значении тока параллельной ветви 1цз и периоде
коммутация T,j обеспечена точная настройка дополнительных полюсов на середину области безыскровой работы машины с помощью известного способа. При этом зависимость, моделирзгющая
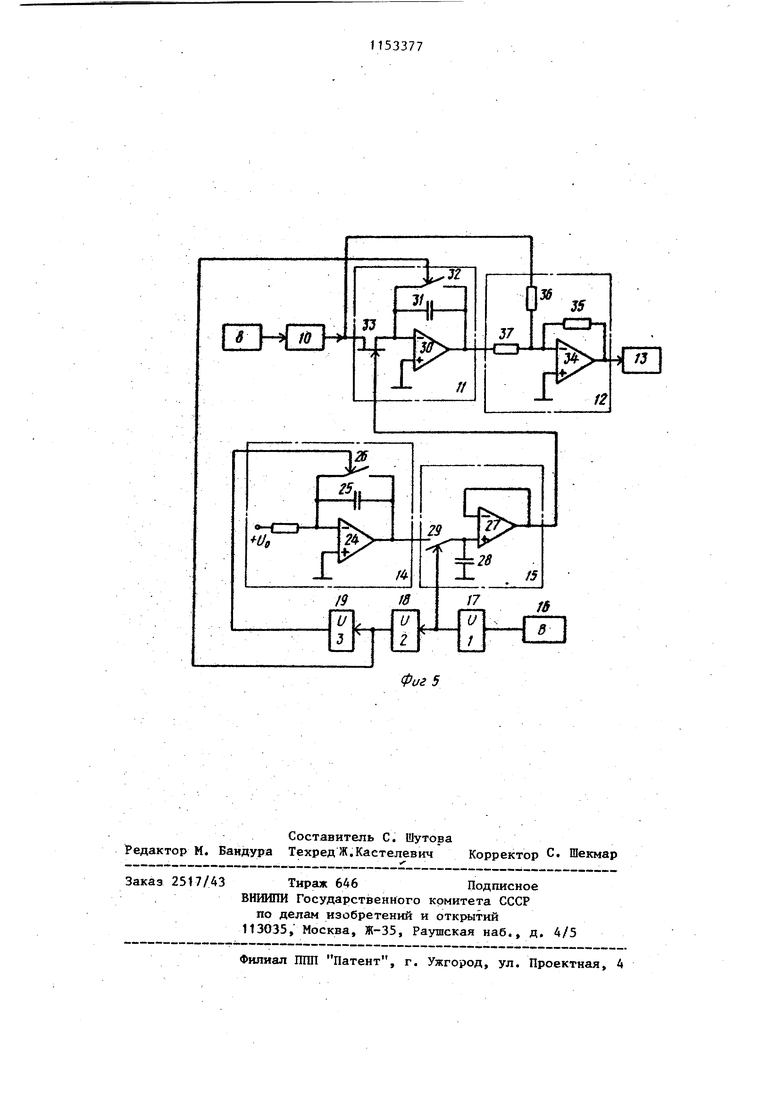
делаемый (в даниом случае прямолинейный) закон коммутации, имеет вид кривой 6 на фиг.3. Предположим, что частота вращения маошны возросла и период коммутации умевылился до значения t)(j . Кривая, моделирующая желаемый закон коммутации, останется неизменной (кривая 6). В результате, даже при действительном прямолиней,ном характере изменения коммутируе мого тока (кривая 7 на фиг.З) процес будет оцениваться как ускоренная ком мутация, т.е. появится сигнал рассогласования (ошибки)пропорциональный разности ординат кривых 6 и 7, и следовательно, будет подаваться сигнал на изменение тока дополнительных полюсов. При широком диапазоне изменения частоты вращения, т.е. и перио да Гц , изменения сигнала рассогласования могут быть весьма значительными, что может привести к смещению процесса коммутации из области бызыскровой работы. В случае изменения периода коммутации изменяют вид кривой, моделирующей желаемьш характер процесса коммутации (она приобретает вид кривой 7 на фиг.З), и сигнал ошибки в этом случае будет иметь место только в случае отклонения процесса коммута ции от желаемого. Устройство улучшения коммутации коллекторных электрических машин (фиг.4) содержит датчик 8 тока комму тируемой секции, выход которого соединен с информационным входом блока интегрирования, на выходе которого формируется сигнал, характеризующий действительный процесс коммутации. Выход датчика 8 соединен также с информационным входом блока 10 памяти, являющимся входом узла формирования сигнала, пропорционального желаемому (например, прямолинейному) закону изменения тока коммутируемой секции. Указанный узел, который может быть определен также как узел формирования сигнала модели, состоит из включенных последовательно блока 10 памя ти, управляемого блока 11 интегрирования, блока 12 сравнения, блока 13 интегрирования. Кроме того, в состав узла входит датчик 14 периода коммутации с включенным последовательно с «им блоком 15 памяти, выход которо го соединен с управляющим входом управляемого блока 11 интегрирования. К выходу дискретного датчика 16 угла поворота подключен вход одновибратора 17, являющегося первым из трех последовательно соединенных одновибраторов 17, 18 и 19, образуют щих совместно с датчиком угла поворота узел формирования импульсов. Выход блока 13 интегрирования подклю чен к первому входу блока 20 сравнения, второй вход которого соединен с выходом блока 9 интегрирования, а выход блока 20 сравнения подключен к входу блока 21 памяти. Выход одновибратора 19 соединен с обнуляющим входом датчика 14 периода коммутации, а обнуляющие входы блоков 9, f1 и 13 интегрирования объединены и подключены к выходу одновибратора 18. Выход одновибратора 17 соединен с входами переписи блоков 10, 15 и 21 памяти, а выход последнего через управляемый усилитель 22 мощности подключен к основной или вспомогательной обмотке 23 дополнительных полюсов. Управление процессам коммутации осуществляется на основании сигнала, пропорционального интегральному отклонению действительного процесса от желаемого за период коммутации. Выявление сигнала рассогласования за указанный период осуществляется в устройстве следующим образом. В течение периода коммутации с помощью блока 9 интегрируется сигнал, пропорциональный действительному току коммутируемой секции, снимаемый с датчика 8. Одновременно интегрируется сигнал, пропорциональный делаемому закону изменения тока коммутируемой секции. Указанные сигналы с выходов блоков 9 и 13 интегрирования поступают на входы блока 20 сравнения, и в конце периода коммутации на выходе этого блока формируется сигнал, пропорциональный интегральному отклонению действительного процесса коммутации от делаемого. Этот сигнал запоминается блоком 21 и поступает на вход управляемого усилителя 22. Сигнал, соответствующий желаемому закону изменения тока коммутируемой секции, создается и интегрируется в УФСМ. Узел формирования импульсов (УФИ) служит для выработки импульсных сигналов, соответствующих началу и окончанию периода процесса коммутации. Работа этих узлов протекает следжячим образом. В начале текущего периода коммутации блоком 10 запомнено текущее значение тока коммутируемой секции, измеренного датчиком 8 (см. i на фиг.1). Блоки 9, 11 и 13 интегрированил обнулены. В результате интегрирования сигнала с блока 10 памяти интегратором 11 на его выходе формируется линейно изменяющийся сигнал. На блоке 12 сравнения этот сигнал суммируется со значением i, запомненным блоком 10, В результате на выходе блока 12 формируется линейно изменяющийся сигнал, соответст вующий желаемому закону изменения тока коммутируемой секции. Интегрирование этого сигнала производится блоком 13, с выхода которого сигнал (сигнал модели) поступает на один из входов блока 20 сравнения. На выходе блока 20 к концу периода коммутации образуется сигнал, пропорциональный разности интегралов сравниваемых блоком 20 сигналов действительно (с выхода блока 9 интегрирования) и желаемого законов изменения тока ком мутируемой секции, т.е. сигнал ошибки. Этот сигнал при поступлении импульса переписи с выхода блока 17 переписывается в блок 21 памяти, и в функции этого запомненного сигна ла ошибки через усилитель 22 осуществляется управление током основно или вспомогательной обмотки 23 дополнительных полюсов. Далее импульсным сигналом с блока 17 осуществляет ся перепись значения тока коммутируе мой секции в начале следующего перио да коммутации (-ic( на фиг. 1), после чего импульсным сигналом с выхода блока 18 производится обнуление блоков 9, 11 и 13 интегрирования и процессы в устройстве протекают аналогично. Поясним подробнее процесс формиро вания сигнала модели при изменении величины тока коммутируемой секции (при изменении тока якоря) и периода коммутации Т (при изменении частоты .вращения машины). Предположим, что при некоторой частоте вращения машины w и, следовательно, периоде коммутации Т значение тока параллельной ветви рав но 1д,(фиг.2). Сигнал на выходе управляемого блока 11 интегрирования будет определяться выражением t. fl, U6b,.(i) где Т -.постоянная интегрирования; ii - напряжение, пропорциональное значению тока, поступающее на вход блока 11 с выхода блока 10 памяти. Учитывая, что в течение периода коммутации Т. Ь const, можно запиu,,(. На выходе блока 12 сравнения получается сумма выходных сигналов блоков 10 и 11 ,,(i)--U,.i что соответствует сигналу модели (например, кривая 4 на фиг.2). При некотором большом значении тока (фиг.2) на выходе блока 10 сигнал принимает значение , и сигнал модели описывается выражением (Jn( , if что соответствует кривой 5 на фиг,2. Таким образом, при ы const и изменении тока якоря (следовательно,и 1д) в устройстве автоматически обеспечивается необходимая перестройка сигнала модели. Для обеспечения автоматической перестройки сигнала модели при изменении частоты вращения ы машины (т.е. периода коммутации Т) в устройстве осуществляется изменение постоянной интегрирования Т и управляемого блока 11 интегрирования. Например, при токе ioi и периоде коммутации , (фиг.З), соответствующего частоте вращения , постоянная интегрирования блока 11 имеет некоторое значение п1, При возрастании частоты вращения ы до некоторого значения Uj период коммутации уменьшается до. величины . При этом сигналом, поступающим с выхода блока 15 памяти, автоматически уменьшается постоянная интегрирования Т, до значения Т,, , в результате чего увеличивается скорость изменения сигнала модели (кривая 7 на фиг.З). Для автоматического управления постоянной интегрирования блока t1 в устройстве с помощью блоков 14 и 15 осуществляется формирование сигнала, пропорционального лительности периода коммутации. Датчик 14 периода коммутации, редставляющий собой интегратор, на вход которого подан постоянный сигнал, к началу текущего период 91 коммутации обнулен. В течение периода коммутации на его выходе формируе ся линейно изменяющийся сигнал, значение которого в конце периода коммутации пропорционально величине Т В конце каждого периода это значение импульсным сигналом переписи с выход блока 17 переписывается в блок 15 памяти и поступает с выхода последне го на управляющий вход управляемого блока 11 интегрирования. Обнуление блока 14 в начале периода коммутации осуществляется импульсным сигналом с блока 19, Формирование импульсных сигналов обеспечивающих обнуление блоков интегрирования и перепись информации в блоки памяти, осуществляется в узле формирования импульсов, содержащем дискретный датчик 16 угла поворота и последовательно соединенные одновибраторы 17, 18 и 19. Дискретный датчик угла поворота содержит оптически непрозрачный диск с радиальным щелевь1ми прорезями, закрепленный на валу машины, а также оптронную пару (источник излучения и фотоприем ник) , При вращении диска происходит периодическое открытие оптического канала оптронной пары, в результате чего на выходе фотоприемника формируются импульсы. Моменты возникновения импульсных сигналов синхронизиро ваны с моментом начала периода коммутации. С помощью одновибраторов из сигнала фотоприемника формируются прямоугольные импульсы, сдвинутые по времени, что обеспечивает описанную последовательность операций обнуления и переписи. Датчик 14 периода коммутации (фиг.5) представляет собой интеграто и выполнен на операционном усилителе 24, в цепи обратной связи которого включен конденсатор 25 .Обнуление этого интегратора осуществляется замыканием управляемого ключа 26, управляющий вход которого подключен к выходу блока 19. Блбк 15 памяти выполнен на операционном усилителе 27, охваченном обратной связью и содержащим конденсатор 28 и ключ 29. Перепись информации в блок 15 осуществ ляется кратковременным замыканием управляемого ключа 29 импульсным . 7 сигналом, поступающим на его управляющий вход с выхода блока 17. Управляемый блок 11 интегрирования реализован на операционном усилителе 30 и содержит в цепи обратной связи конденсатор 31 и управляемый ключ 32. На входе этого операционного усилителя включено управляемое сопротивление, в качестве которого использован полевой транзистор 33. Величина сотротивления этого транзистора определяется сигналом, поступающим на его затвор с блока 15 памяти. В зависимости от величины сигнала с блока 15 изменяется активное сопротивление R транзистора 33 и тем самым задается необходимая величина постоянной интегрирования блока 11 Т RCj. Обнуление этого блока осуществляется кратковременным замыканием ключа 32, управляющий вход которого соединен с выходом блока 18, Информационный вход блока 11 подключен к выходу блока JO памяти. Блок 12 сравнения реализован на суммирующем операционном усилителе 34, в цепи обратной связи которого включено активное сопротивление 35. Входные сигналы на блок 12 поступают с выходов блоков 10 и 11 и через резисторы 36 и 37, а его выходной сигнал поступает на информационный вход блока 13 интегрирования. Ключи в схеме устройства выполнены на транзисторах, работающих в ключевом режиме. Блоки 9 и 13 интегрирования реализованы аналогично блоку 14. Блоки 10 и 21 памяти выполнены аналогично блоку 1. Одновибраторы 17, 18 и 19 реализованы на интегральных элементах. Таким образом, применение предлагаемого устройства улучшения коммутации коллекторных электрических машин за счет изменения тока дополнительных полюсов благодаря использованию новых блоков и связей позволяет повысить точность автоматической настройки коммутации на середину области безскровой работы машины особенно в условиях, когда частота вращения и ток якоря могут изменяться в значительном диапазоне, а также обеспечить помехозащищенность устройств.
Фиг.2
It аз


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ улучшения процесса коммутации коллекторных электрических машин | 1985 |
|
SU1249657A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1985 |
|
SU1251233A1 |
| Способ улучшения коммутации коллекторных электрических машин | 1985 |
|
SU1249656A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1981 |
|
SU974505A1 |
| Устройство для улучшения коммутацииКОллЕКТОРНыХ элЕКТРичЕСКиХ МАшиН | 1979 |
|
SU817877A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1980 |
|
SU943995A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1981 |
|
SU1023542A1 |
| ОДНОФАЗНЫЙ КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2337459C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ МАШИН ПОСТОЯННОГО ТОКА | 1999 |
|
RU2172547C1 |
| Коллекторная электрическая машина с дополнительными полюсами | 1977 |
|
SU721882A1 |


УСТРОЙСТВО УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ , содержащее управляемый усилитель с выводами для подключения к обмотке дополнительных полюсов, датчик тока коммутируемой секции, выполненный в виде вспомогательной секции, предназначенной для укладки рядом с основной секцией обмотки якоря, отличающееся тем, что, с целью повьшения точности автоматической настройки коммутации на середину области безыскровой работы и помехозащищенности, устройство снабжено блоком интегрирования, узлом формирования импульсов, выполненным в виде последовательно включенных дискретного датчика угла поворота и трех одновибраторов, узлом формирования сигнала модели желаемого характера коммутации, выполненным из включенных последовательно блока памяти, управляемого блока интегрирования, блока сравнения, второго блока интегрирования, датчиком периода коммутации с включенным последовательно вторым блоком памяти, а также BTopbtM блоком сравнения и третьим блоком памяти, при этом пыход датчика тока коммутируемой секции подключен к информационным входам первого блока памяти и первого блока интегрирования, обнуляющий вход последнего объединен с обнуляющими входами управляемого блока интегрирования, второго блока интегрирования и подключен к выходу второго одновибратора, выход третьего одновибратора соединен с обнуляющим (Л входом датчика периода коммутации, выход первого одновибратора подключен к объединенным входам переписи первого, второго и третьего блоков памяти, выход второго из соединен с управляющим входом управляемого блока интегрирования, информационный ел вход которого подключен к второму со входу первого блока сравнения, информационный вход третьего блока памяти 00 соединен с выходом второго блока vj сравнения, первый вход которого подVI ключен к выходу второго блока интегрирования, а второй вход второго блока сравнения соединен с выходом первого блока интегрирования, выход же третьего блока памяти через уп равляемый усилитель подключен к обмотке дополнительных полюсов.
Т
,. .
I
-
II
h.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU315250A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1981 |
|
SU974505A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
