О5
ел
СП
ел
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования нагруженности деталей ударно-вращательного механизма | 1980 |
|
SU946909A1 |
| Устройство для ударного нагружения объекта | 1987 |
|
SU1567903A1 |
| Устройство для защитного отключения трехфазной электроустановки переменного тока | 1983 |
|
SU1116490A1 |
| Ударный механизм гайковерта | 1982 |
|
SU1058768A1 |
| Стенд для испытаний механических систем на ударное воздействие | 1987 |
|
SU1538079A1 |
| Стенд для исследований нагруженности деталей ударно-вращательного механизма | 1986 |
|
SU1321575A2 |
| Устройство для защитного отключения трехфазной электроустановки | 1983 |
|
SU1116491A1 |
| Камертонный стенд для динамических испытаний изделий | 1988 |
|
SU1587358A1 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| Стенд для испытания изделий на комплексное динамическое воздействие | 1980 |
|
SU920428A1 |
СТЕНД ДЛЯ ИССЛЕДОВАНИЯ НАГРУЖЕННОСТИ ДЕТАЛЕЙ УДАРНОВРАЩАТЕЛЬНОГО МЕХАНИЗМА по авт. св. № 946909, отличающийся тем, что, с целью снижения трудоемкости исследований он снабжен взаимодействующим с приводом импульсного действия блоком управления, соединенными с ним блоками измерения удлинения гибкой связи после удара и зазора между платформой и ее ограничителем в исходном положении и связанным с блоками измерения блоком сравнения удлинения гибкой связи и зазора между платформой и ее ограничителем.
У/////////////////////////,
Фиг.1
Изобретение относится к устройствам для исследования ударно-вращательных механизмов, а именно для .исследования нагруженности деталей ударно-вращательных механизмов, моделирования и имитации возникающих в деталях нагрузок, проверки и регулировки имитаторов резьбовых соедине НИИ, исследования ударных процессов в гайкорертах.
По основному авт. св. № 946909 известен стенд для исследования нагруженности деталей ударно-вращательного механизма, содержащий основание размещенные на нем обойму с деталями ударно-вращательного механизма, нагружаемый элемент и привод импульсного действия с регулируемой энергией .удара, выполненный в виде вала, платформы с грузом, соединенной с последним гибкой связью, электромагнита для взвода и сброса груза, установленного с возможностью перемещения вдоль гибкой связи и регулируемого ограничителя хода платформы 1.
Недостатком известного стенда является длительная наладка его перед началом исследований, заключающаяся в подборе величины зазора между платформой в ее исходном положении и ограничителем хода платформы, который должен быть больше удлинения гибкой связи при соударении груза с платформой, что приводит к увеличению трудоемкости исследований.
Цель изоберетения - снижение трудоемкости исследований.
Указанная цель достигается тем, что стенд для исследования нагруженности деталей ударно-вращательного механизма снабжен взаимодействующим с приводом импульсного действия блоком управления, соединенными с ним блоками измерения удлинения гибкой связи после удара и зазора между платформой и ее ограничителем в исходном положении и связанным с блоками измерения блоком сравнения удлинения гибкой связи и зазора между платформой и ее ограничителем.
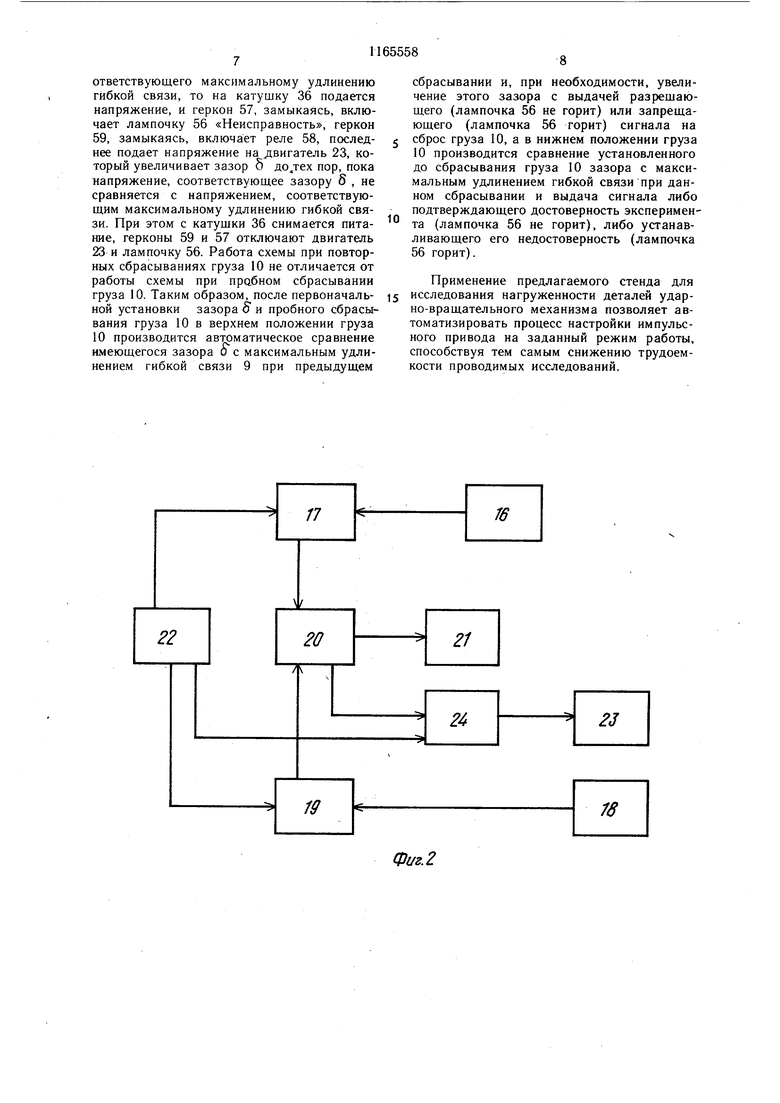
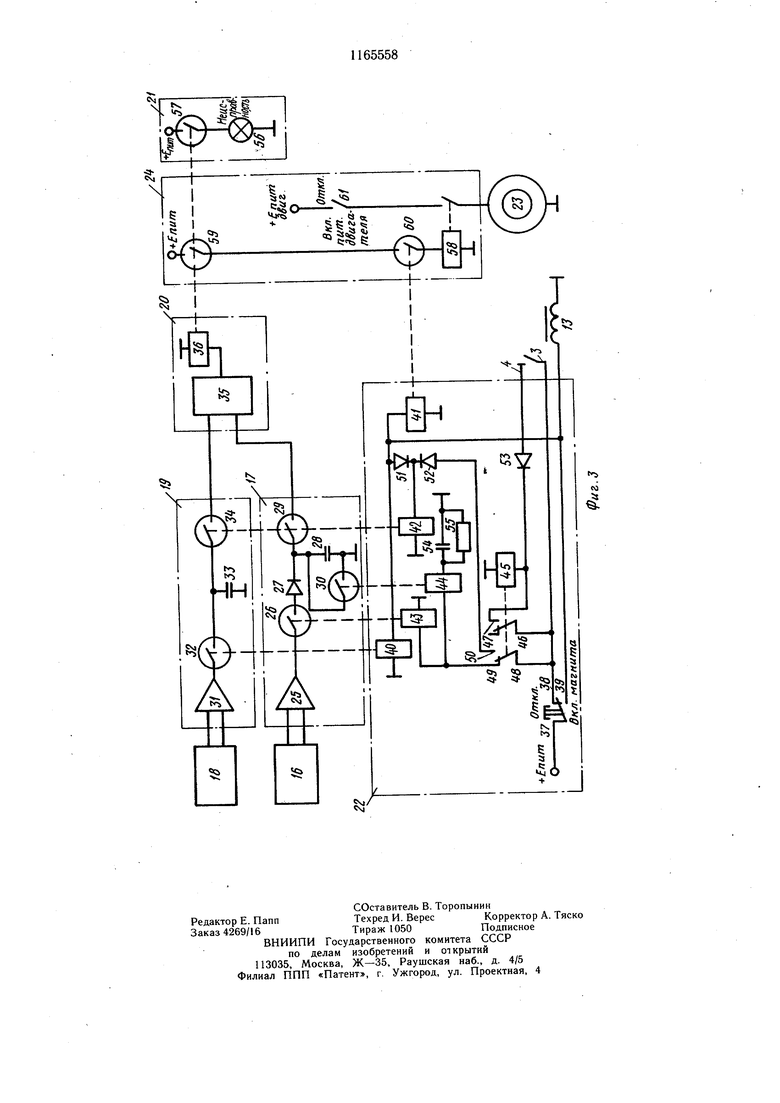
На фиг. 1 изображен стенд, общий вид; на фиг. 2 - блок-схема измерения и корректировки зазора между платформой в ее исходном положении и ограничителем хода платформы; на фиг. 3 - пример конкретного выполнения схемы измерения и корректировки зазора между платформой и, ее ограничителем.
Стенд для исследования нагруженности деталей ударно-вращательного механизма содержит основание 1, на котором размещены обойма 2 с деталями ударно-вращательного механизма - шпинделем 3 и бойком 4, кронштейн 5 с закрепленным нагружаемым элементом 6 (торсион, резьбовое соединение и т. п.), и привод импульсного действия с регулируемой энергией удара, состоящий из вала 7, соединяемого с бойком 4, платформы 8, соединенной с валом 7 гибкой связью 9, груза 10, установленного над платформой 8, регулируемого по 5 высоте ограничителя 11 хода платформы 8, обеспечивающего остановку последней в момент, предшествующий соударению бойка 4 и шпинделя 3 (достигается путем установки определенного зазора (Г между взаимодейQ ствующими поверхностями груза 10 и платформы 8), установленного на регулируемой по высоте опоре 12 электромагнита 13, предназначенного для установки и сброса груза 10. Для регулирования положения по высоте ограничителя 11 служат направляющие стержни 14 и винт 15, контактирующий с ограничителем 11.
Для измерения удлинения гибкой связи 9 после удара служит блок измерения (фиг.2 содержащий датчик 16 (фиг. 1), регистрирующий удлинение, и блок 17 для запоминания максимальной величины удлинения.
Блок измерения величины зазора S между платформой 8 и ограничителем 11 в исходном положении содержит датчик 18 и комплексный запоминающий блок 19, работающий в режиме запоминания величины зазора S или в режиме непрерывной передачи информации о величине
Блок сравнения максимальной величины удлинения гибкой связи 9 и величины зазора 5 содержит сравнивающий блок 20 и индикаторное устройство 21.
Блок 22 управления стендом определяет режим работы комплексного запоминающего блока 19 и индикаторного устройства 21, информирующего о готовности стенда к работе или необходимости регулировки зазора о , при этом датчик 16 удлинения соединен с входом запоминающего блока 17, датчик 18 соединен с входом запоминающего блока 19, выходы блоков 17 и 19 соединены с двумя входами сравнивающего 0 блока 20, один выход блока 22 управления соединен с входом блока 17, а другой - с входом блока 19, выход блока 20 соединен с индикаторным устройством 21.
5 Регулировка положения ограничителя 11 может быть проведена вручную, в соответствии с сигналом индикаторного устройства 21, или автоматически. В последнем случае для этого служат реверсивный двигатель 23, выход которого соединен с винтом 15,
и блок 24 управления двигателем 23, выход которого.соединен с входом двигателя 23 при этом второй выход блока 20 соединен с входом блока 24, а третий выход блока 22 соединен с вторым входом бло5 ка 24.
Блок-схема измерения и корректировки зазора о может быть реализована, например, в виде электрической схемы (фиг. 3),
блок 17 запоминания максимальной величины удлинения гибкой связи 9 которой состоит из последовательно соединенных нормализирующего усилителя 25, геркона 26, диода 27, одного вывода запоминающего конденсатора 28 и геркона 29, причем второй вывод запоминающего конденсатора 28 соединен с корпусом блока 17, а параллельно запоминающему конденсатору 28 подсоединен геркон 30.
Комплексный запоминающий блок 19 состоит из последовательно соединенных нормализирующего усилителя 31, геркона 32, одного вывода запоминающего конденсатора 33 и геркона 34, причем второй вывод запоминающего конденсатора 33 соединен с корпусом блока 19.
Все перечисленные герконы в исходном состоянии разомкнуты. Блок 20 сравнения максимальной величины удлинения гибкой связи 9 и величины зазора 6 состоит из последовательно соединенных компаратора 35 и катущки 36.
Блок 22 управления стендом состоит из переключателя 37 «Вкл. магнита, с размыкающим контактом 38 и замыкающим контактом 39; катущек 40-44; реле 45 с двумя группами контактов, одной, состоящей из подвижного контакта 46 и замыкающего контакта 47, второй, состоящей из подвижного контакта 48; размыкающего контакта
49и замыкающего контакта 50, разделительных диодов 51-53, нор ально соединенных времязадающего конденсатора 54 и разрядного резистора 55. При этом один вывод катущек 40 43 и обмотки реле 45 соединены с корпусом блока 22, один вывод катушки 44 соединен с корпусом блока 22 через последовательно включенный времязадающий конденсатор 54, второй вывод катущек 40 и 41 и анод диода 51 соединены с замыкающим контактом 39 переключателя 37, коммутирующего подачу питания на элементы блока 22. Ка тод диода 51 соединен с вторым выводом катущки 42 и катодом диода 52, анод последнего соединен с замыкающимся контактом
50реле 45, размыкающий контакт 49 реле
45соединен с вторым выводом катушек 43 и 44, размыкающий контакт 38 переключателя 37 соединен с подвижными контактами
46и 48 реле 45, замыкающий контакт 47 реле 45 соединен с вторым выводом обмотки реле 45 и катодом диода 53.
Индикаторное устройство 21 состоит из последовательно соединенных лампочки 56 «Неисправность и герконг 57, подключаю.щего один вывод лампочки 56 к источнику питания, второй вывод лампочки соединен с корпусом устройства 21.
Блок 24 управления двигателем состоит из последовательно соединенных обмотки реле 58 и герконов 59 и 60, подключающих один вывод обмотки реле 58 к источнику
питания, второй вывод обмотки реле соединен с корпусом блока 24 и последовательно соединенных выключателя 61 «Вкл. пит. двигателя, и контактов реле 58. 5 Стенд для исследования нагруженности деталей ударно-вращательного механизма работает следующим образом.
Груз 10 устанавливают на определенной высоте и фиксируют, например, с помощью электромагнита 13 (масса и высота падения груза выбираются, исходя из требуемой энергии удара). При сбрасывании груза 10 происходит его соударение с платмормой 8, после чего начинается их совместное поступательное движение.
5 Это перемещение через гибкую связь 9 приводит к вращению вала 7 и соединенного с ним бойка 4. Когда платформа 8 перемещается на расстояние , ее движение прекращается, а вал 7 совместно с бойком 4 продолжает инерционное вращение до соударения последнего со шпинделем 3. При этом напряжения силы, действующие на боек 4 и шпиндель 3 ударно-вращательного механизма и другие параметры, могут быть определены, например, с помощью тен5 зорезисторов, наклеенных на исследуемые детали.
Следует заметить, что величина зазора 6 должна быть с одной стороны больше максимального изменения длины гибкой связи 9 при соударении груза 10 с платформой 8, а с другой стороны она ограничена углом относительного поворота бойка 4 и щпинделя 3 до их соударения (фиг. 1).
Зазор 6 выбирается и регулируется в 5 процессе исследований следующим образом. Вначале устанавливается ориентировочное (полученное расчетным путем) значение б, которое фиксируется в комплексном запоминающем блоке 19, затем проводится про1бное сбрасывание груза 10. При этом 0 датчик 16 измеряет удлинение гибкой связи 9 и максимальное значение удлинения фиксируется в блоке 17 запоминания.
Зафиксированные величины сравниваются в блоке 20 сравнения, и соответствую5 щий результирующий сигнал поступает в его индикаторное устройство 21, по сигналу которого делается вывод о готовности стенда к работе. В этом случае, если растяжение гибкой связи 9 больше или равно S , стенд к работе не подготовлен, и прово0 дится корректировка зазора 5.
В противном случае стенд считается подготовленным к работе и приводится в исходное положение.
Корректировка зазора 5 проводится следующим образом.
После пробного сбрасывания груза 10 стенд приводится в исходное положение, но информация в блоке 17 о максимальном удлинении гибкой связи 9 при пробном сбрасывании груза 10 при этом не стирается, а остается в качестве опорного сигнала на время корректировки зазора 5 , а комплексный запоминающий блок 19 переводится в режим непрерывной передачи информации о величине о . Далее проводится соответствующее изменение б до тех пор, пока результирующий сигнал в блоке 20, сравнения и показание его индикаторного устройства 21 не достигают соответствующего значения. После этого проводится повторное сбрасывание груза 10, в процессе которого производится стирание информации в блоке 17 запоминания, а комплексный запоминающий блок 19 переводится в режим запоминания. Далее все действия повторяются в указанной последовательности (повторное сбрасывание груза 10 проводится до тех пор, пока удлинение гибкой связи 9 меньше или равно б ).
Изменение зазора 5 может проводиться вручную или автоматически. В последнем случае двигатель 23, перемещающий с помощью винта 15 ограничитель 11, управляется сигналом из блока 24, который управляется сигналами из блока 20 сравнения и блока 22 управления стендом. При достижении результирующим сигналом в блоке 20 определенного значения последний дает команду блоку 24 на выключение двигателя 23.
Если измерение и корректировка зазора О осуществляются с помощью электрической схемы, изображенной на фиг. 3, то последняя работает следующим образом.
Первоначальная установка зазора о осуществляется вручную, для чего выключатель 61 «Вкл. пит. двигателя устанавливается в положение «Откл. При этом двигатель 23 находится в отключеннном состоянии при любом положении контактов реле 58. Состояние лампочки 56 во внимание не принимается. Кулачки бойка 4 и щпинделя 3 приводятся в разомкнутое состояние.
Груз 10 поднимается и переключатель 37 переводится в положение «Вкл.магнита При этом, наряду с фиксацией груза 10, электромагнитом 13 подается напряжение на катущку 40. Геркон 32 замыкается и на запоминающий конденсатор 33 с выхода нормализирующего усилителя 31 подается напряжение, соответствующее устанавливаемому зазору. После установки зазора 5 производится пробное сбрасывание груза 10, для чего переключатель 37 переводится в положение «Откл.. При этом напряжение питания снимается с электромагнита 13 (груз 10 начинает падать) и с катущки 40, а подается на катушки 43 и 44. Напряжение на катущку 44 подается кратковременно (на время заряда конденсатора 54). Геркон 32 размыкается и на запоминающем конденсаторе 33 остается напряжение, соответствующее установленному зазору 5. Геркон 30 на время, меньщее времени падения груза, кратковременно замыкается и разряжает 5 запоминающий конденсатор 28, подготавливая последний к запоминанию нового значения напряжения. Геркон 26 замыкается и на запоминающий конденсатор 28 с выхода нормализирующего усилителя 25 подается напряжение, соответствующее удлинению гибкой связи 9. Диод 27, препятствуя разряду запоминающего конденсатора 28, через выход нормализирующего усилителя 25 позволяет запомнить максимальное значение напряжения, соответствующее мак5 симальному удлинению гибкой связи 9.
После соударения кулачков бойка 4 и щпинделя 3 срабатывает и самоблокируется с помощью контактной группы 46 и 47 реле 45. При этом контактной группой 48 и 49 снимается напряжение с катущек 43 и 44 и через контакты 48 и 50 и диод 52 подается на катущку 42. Конденсатор 54 разряжа ется через резистор 55, геркон 2,6 размыкается, а герконы 34 и 29 замыкаются, при этом на входы компаратора 35 с запоминающих конденсаторов 33 и 28 подаются напряжения, соответствующие установленному зазору 6 и максимальной величине удлинения гибкой связи 9. Если напряжение, соответствующее установленному зазору 6, меньще напряжения, соответствующего максимальной величине удлинения гибкой связи 9, то на катущку 36 подается напряжение, включается геркон 59 и загорается лампочка 56 «Неисправность. После этого производится корректировка зазора б. В противj ном случае лампочка 56 не загорается и стенд считается готовым в работе.
Корректировка зазора 6 осуществляется следующим образом.
После пробного сбрасывания груз 10 поднимается и переключатель 37 переводится в положение Вкл.магнита. При этом напряжение питания подается на электромагнит 13, фиксирующий груз 10 и катущки 40-42. Герконы 32 и 34 замыкаются и соединяют выход нормализирующего усилителя 31, .запоминающий конденсатор 33 и один вход компаратора 35, на который подается соответствующее текущему значению зазора б напряжение.
Геркон 29, замыкаясь, соединяет запомиQ нающий конденсатор 28, заряженный до напряжения, соответствующего максимальному удлинению гибкой связи 9, с вторым входом компаратора 35. Геркон 60, замыкаясь, подключает обмотку реле 58 к геркону 59. Выключатель 61 переводится в положение «Вкл. пит. двигателя и подключает источник питания двигателя 23 к контакту реле 58. Если напряжение, соответствующее зазору S меньще напряжения, соответствующего максимальному удлинению гибкой связи, то на катушку 36 подается напряжение, и геркон 57, замыкаясь, включает лампочку 56 «Неисправность, геркон 59, замыкаясь, включает реле 58, последнее подает напряжение на двигатель 23, который увеличивает зазор б додех пор, пока напряжение, соответствующее зазору S , не сравняется с напряжением, соответствующим максимальному удлинению гибкой связи. При этом с катущки 36 снимается питание, герконы 59 и 57 отключают двигатель 23 и лампочку 56. Работа схемы при повторных сбрасываниях груза 10 не отличается от работы схемы при прабном сбрасывании груза 10. Таким образом, после первоначальной установки зазора 5 и пробного сбрасывания груза 10 в верхнем положении груза 10 производится автоматическое сравнение имеющегося зазора Ос максимальным удлинением гибкой связи 9 при предыдущем
сбрасывании и, при необходимости, увеличение этого зазора с выдачей разрещающего (лампочка 56 не горит) или запрещающего (лампочка 56 горит) сигнала на сброс груза 10, а в нижнем положении груза 10 производится сравнение установленного до сбрасывания груза 10 зазора с максимальным удлинением гибкой связи при данном сбрасывании и выдача сигнала либо подтверждающего достоверность эксперимента (лампочка 56 не горит), либо устанавливающего его недостоверность (лампочка 56 горит).
Применение предлагаемого стенда для исследования нагруженности деталей ударно-вращательного механизма позволяет автоматизировать процесс настройки импульсного привода на заданный режим работы, способствуя тем самым снижению трудоемкости проводимых исследований.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для исследования нагруженности деталей ударно-вращательного механизма | 1980 |
|
SU946909A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
