Известны конструкции культиваторов, предназначенные для одновременной обработки за один проход междурядий и междугнездий пропашных культур, для чего на раме установлены две группы рабочих органов - неподвижные, типа обычных стрельчатых лап, и вращающиеся. Неподвижные лапы служат для обработки междурядий, a вращающиеся - для обработки почвы между гнездами растений в рядах.
С этой целью вращающиеся лапы обычно выполняются в виде четырехлопастных ножей, периодически приводимых во вращение действием реакци почвы при подходе такого ножа к растепию и удерживаемых от вращения стопорящим механизмом во время прохождения ножа в почве между гнездами.
Освобождение стопорящего механизма производится путем контакта его со стеблем пропашной культуры, для чего стебааь должен иметь определепную жесткость.
Во избежание повреждений стеблей при таком контакте, a также для использования культиватора на ранних стадиях развития растений, когда прямой контакт со стеблем трудно осуществим, предлагается конструкция культиватора, в котором освобождение стопорящего механизма достигается применением мерной проволоки с шайбами.
Мерная проволока, как обычно, закрепляется неподвижно в почве своими концами и при движении вдоль нее культиватора шайбы проволоки воздействуют через узлоуловитель на механизм стопора, освобождая ножи для вращения.
С целью корректировки времени поворота ножей, узлоуловитель устанавливается на подвижной каретке, которая может скользить относительно проволоки, с помощью рычага.
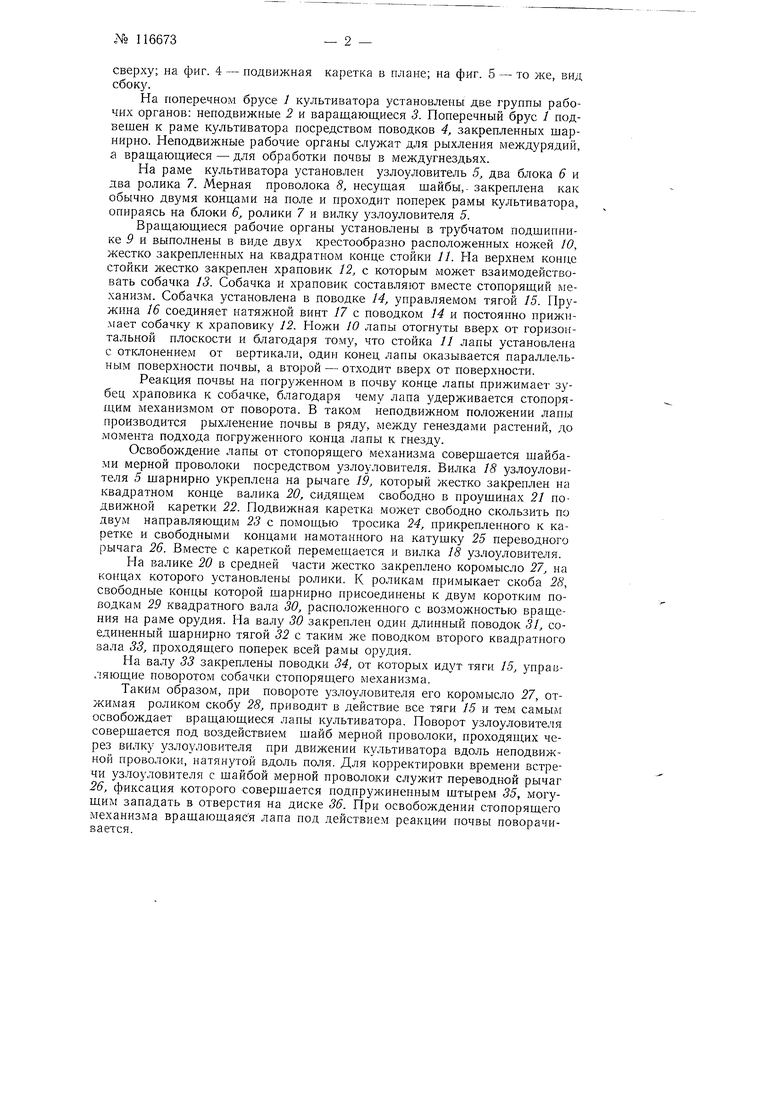
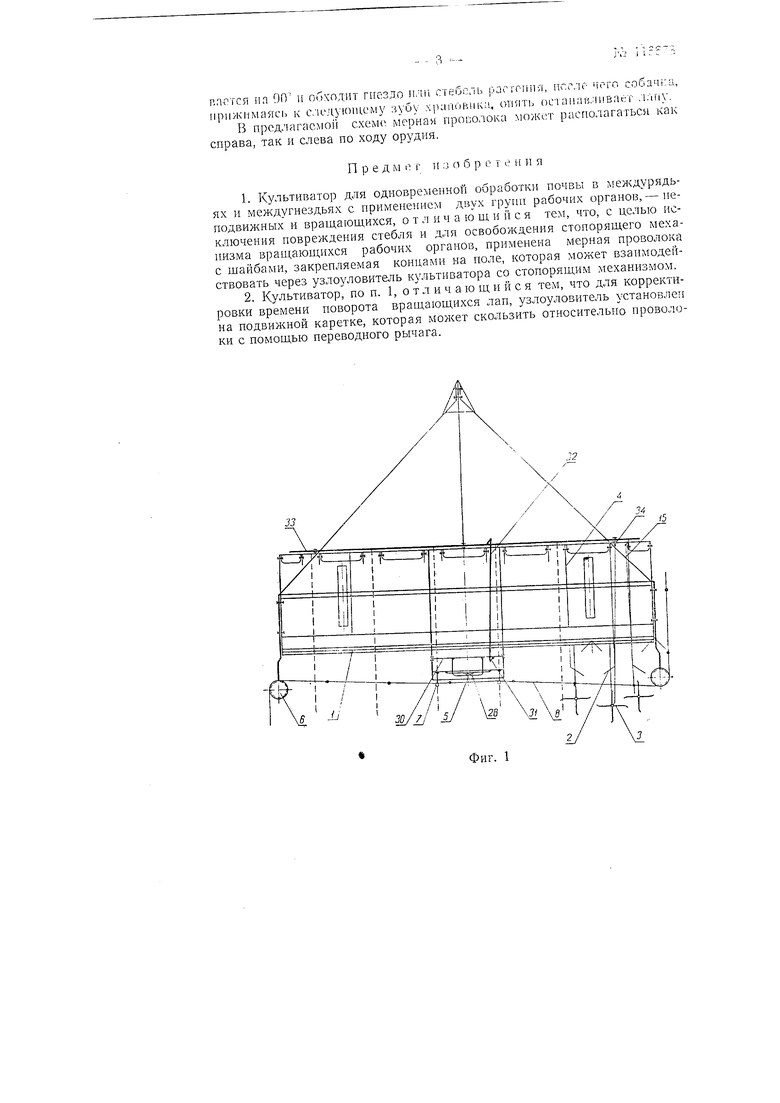
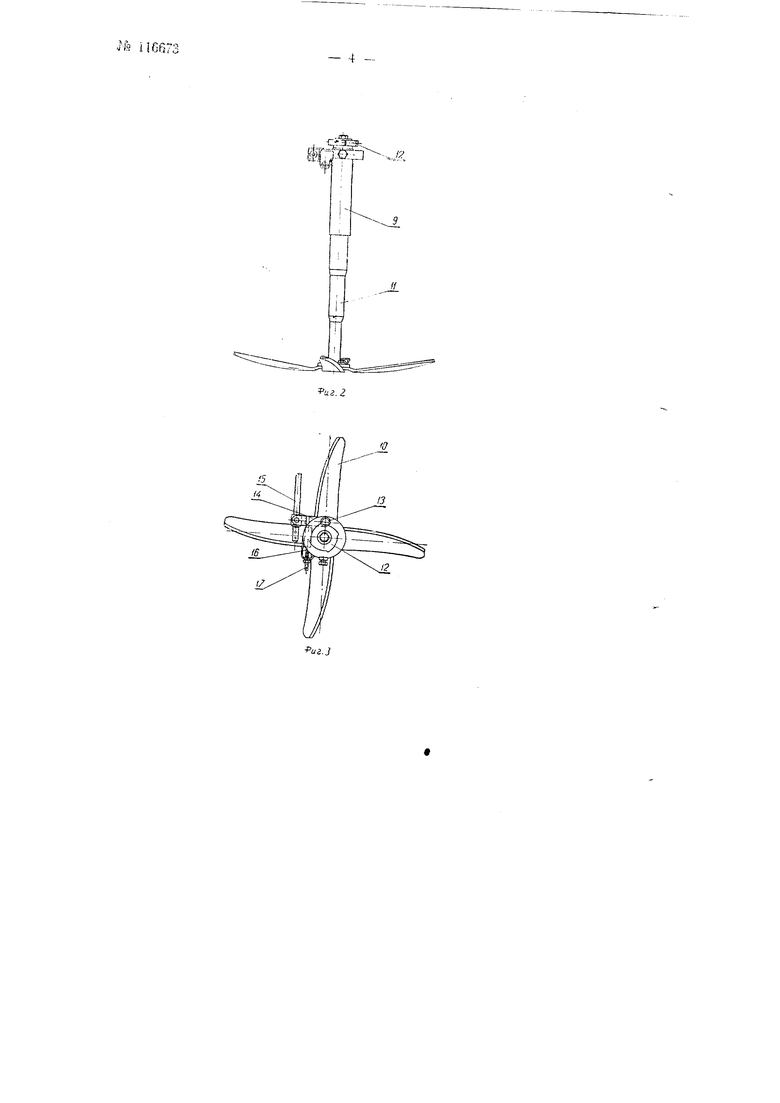
На фиг. 1 схематически изображен предлагаемый культиватор; на фиг. 2 - вращаюпл,ийся рабочий орган, вид сбоку; на фиг. 3 - то же, вид
№ 116673- 2 -
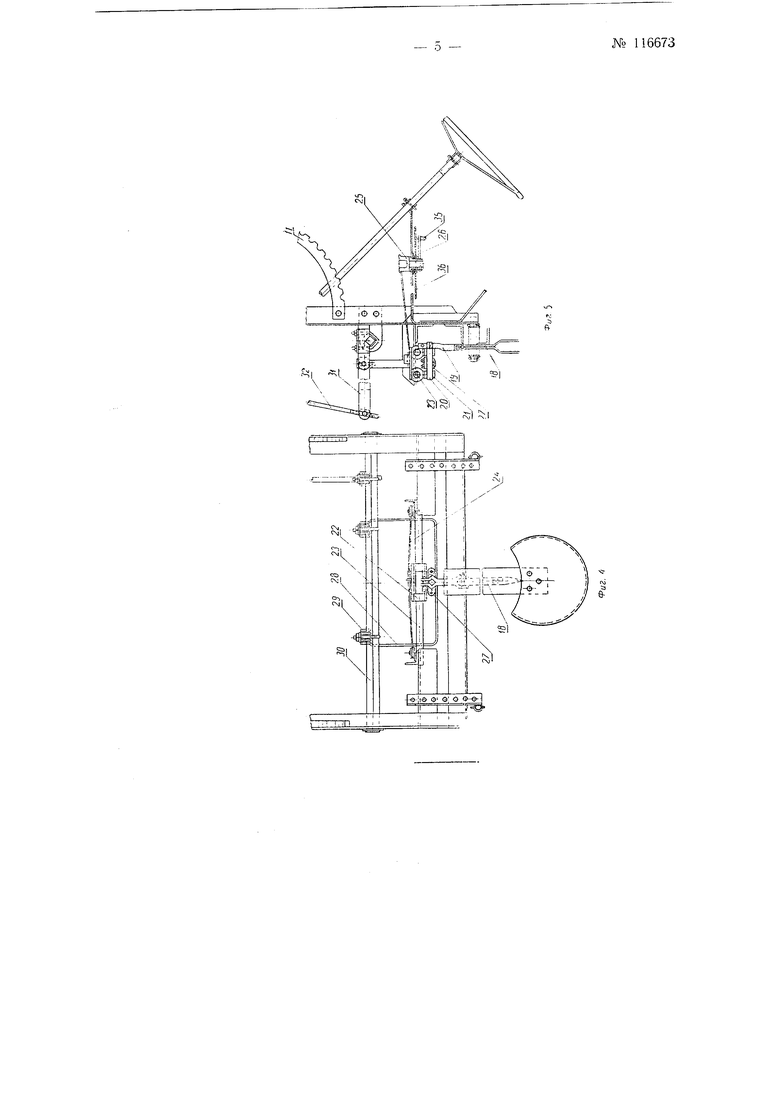
сверху; на фиг. 4 - подвижная каретка в плане; на фиг. 5 - то же, вид сбоку.
На поперечном брусе 1 культиватора установлены две группы рабочих органов: неподвижные 2 и варащающиеся 3. Поперечный брус / подвешен к раме культиватора посредством поводков 4, закрепленных шарнирно. Неподвижные рабочие органы служат для рыхления междурядий, а вращающиеся - для обработки почвы в междугнездьях.
На раме культиватора установлен узлоуловитель 5, два блока 6 и два ролика 7. Мерная проволока 8, несущая шайбы,, закреплена как обычно двумя концами на поле и проходит поперек рамы культиватора, опираясь на блоки 6, ролики 7 и вилку ззлоуловителя 5.
Вращающиеся рабочие органы установлены в трубчатом подшипнике 5 и выполнены в виде двух крестообразно расположенных ножей 10, жестко закрепленных на квадратном конце стойки 11. На верхнем конце стойки жестко закреплен храповик 12, с которым может взаимодействовать собачка 13. Собачка и храповик составляют вместе стопорящий механизм. Собачка установлена в поводке 14, управляемом тягой 15. Пружина 16 соединяет натяжной винт 17 с поводком 14 и постоянно прижн-мает собачку к храповику 12. Ножи 10 лапы отогнуты вверх от горизонтальной плоскости и благодаря тому, что стойка // лапы установле 1а с отклонением от вертикали, один конец ланы оказывается параллельным поверхности почвы, а второй - отходит вверх от поверхности.
Реакция почвы на погруженном в почву конце лапы прижимает зубец храповика к собачке, благодаря чему лапа задерживается стопорящим механизмом от поворота. В таком неподвижном положении лапы производится рыхленение почвы в ряду, между генездами растений, до момента подхода погруженного конца лапы к гнезду.
Освобождение лапы от стопорящего механизма соверщается шайбами мерной проволоки посредством узлоуловителя. Вилка 18 узлоуловителя 5 шарнирно укреплена на рычаге 19, который жестко закреплен на квадратном конце валика 20, сидящем свободно в проушинах 21 подвижной каретки 22. Подвижная каретка может свободно скользить по двум направляюшим 23 с помощью тросика 24, прикрепленного к каретке и свободными концами намотанного на катушку 25 переводного рычага 26. Вместе с кареткой перемещается и вилка 18 узлоуловителя. На валике 20 в средней части жестко закреплено коромысло 27, на концах которого установлены ролики. К роликам примыкает скоба 28, свободные концы которой шарнирно присоединены к двум коротким поводкам 29 квадратного вала 30, расположенного с возможностью вращения на раме орудия. На валу 30 закреплен один длинный поводок 31, соединенный шарнирно тягой 32 с таким же поводком второго квадратного зала 33, проходящего поперек всей рамы орздия.
На валу 33 закреплены поводки 34, от которых идут тяги 15, управляющие поворотом собачки стопорящего механизма.
Таким образом, при повороте узлоуловителя его коромысло 27, отжимая роликом скобу 28, приводит в действие все тяги 15 и тем самььм освобождает вращающиеся лапы культиватора. Поворот узлоуловителя совершается под воздействием шайб мерной проволоки, проходящих через вилку узлоуловителя при движении культиватора вдоль неподвижной проволоки, натянутой вдоль поля. Для корректировки времени встречи узлоуловителя с шайбой мерной проволоки служит переводной рычаг 26, фиксация которого совершается нодпрулсиненным штырем 35, могущим западать в отверстия на диске 36. При освобождении стопорящего механизма вращающаяся лапа под действием реакции почвы поворачивается.
г.аотся пп 90 и обходит гнездо или стебель pacroiuifi, псгле чего сооачка, 11рижимаяс1 к следующему зубу храповика, опять остаиавливасгг ллпу. В предлагаемой схеме мерная лросолока може.т располагаться как справа, так и Cvieea по ходу орудия.
1.Культиватор для одновременной обработки почвы в междурядьях и междугнездьях с применением двух групп рабочих органов,- неподвижных и вращающихся, о т л н ч а ю щ и и с я тем, что, с целью исключения новреждения стебля и для освобождения стопорящего механизма вран-;аюп;ихся рабочих органов, применена мерная проволока с шайбами, закрепляемая концами на поле, которая может взаимодействовать через узлоуловитель культиватора со стопорящим механизмом.
2.Культиватор по п. 1, о т л и ч а ю щ и и с я тем, что для корректировки времени поворота вращающихся лап, узлоуловитель установлен на подвижной каретке, которая может скользить относительно проволоки с помощью переводного рычага.
Пред м 1 г п ;, о б р е г е н и я
Фиг. 1
ar-ftsT-- 1 /
