О) 00
00 I1 Изобретение относится к устройств автоматического управления ловом рыб преимущественно мелкой, рыбонасосным установками с применением привлекающих источников света. Цель изобретения - повьппение производительности путем обеспечения возможности облова нижнего горизонта На чертеже представлена система для управления ловом рыбы рыбонасосом. Система содержит датчик 1 концент рации рыбы, датчик 2 глубины, сигнализаторы минимального количества рыбы 3, верхнего 4 и нижнего 5 горизонтов лова рыбы, исполнительные механизмы спуска 6 и подъема 7 залав ливающего устройства, логический эле мент И 8, элементы памяти 9 и задерж ки 10. Система для управления ловом рыбы рыбонасосом работает следующим образом. Когда в процессе лова на некотором горизонте концентрациярыбы у залавливающего устройства снижается до минимальйой промысловой, сигнализатор 3 минимального количества рыбы, управляемый от датчика 1 концентрации рыбы, формирует команду спуска, поступающую на вход исполнительного механизма 6 спуска, который, воздействуя на электропривод залавливаклцего устройства, осуществляет его спуск на следующий горизонт лова. Облов нижнего горизонта. Как только при очередном спуске залавливающее устройство достигает нижний горизонт лова, сигнализатор 5 нижнего горизонта переводит элемент 9 памяти в состояние Вкл.. При этом с выхода элемента 9 памяти на 32 исполнительный механизм 6 спуска поступает команда Запрет спуска. Одновременно с другого выхода элемента 9 памяти через элемент 10 задержки на входы логических элементов И 8 через промежуток времени, определяемый элементом 10 задержки, поступает команда Подъем. Если за время задержки концентрация рыбы у залавлива1ющего устройства становится больше минимальной промысловой, сигнал управления на входе логического элемента И 8 отсутствует. Поэтому команду Подъем логический элемент И 8 не пропускает, лов рыбы на нижнем горизонте продолжается. При падении концентрации рыбы до минимальной промысловой на входах логических элементов И 8 появляется разрешающий сигнал. При этом на его выходе формируется команда Подъем, происходит подъем залавливающего устройства на верхний горизонт лова. Как только залавливающее устройство достигает верхний горизонт, сигнализатор 4 верхнего горизонта формирует команду Останов для исполнительного механизма 7 подъема и производит сброс элемента 9 памяти в исходное нулевое состояние. Последнее обеспечивает деблокирование исполнительного механизма 6 спуска. Далее цикл лова повторяется. Таким образом, в описанном цикле лова подъем залавливающего устройства на верхний горизонт лова происходит не сразу после достижения нижнего горизонта лова, а благодаря действию элемента 10 задержки и логического элемента И 8 только после того, как концентрация рыбы на нижнем горизонте становится ниже минимальной промысловой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для лова рыбы | 1989 |
|
SU1768099A1 |
| Залавливающее устройство рыбонасоса | 1987 |
|
SU1641240A1 |
| Способ бессетевого лова сайры | 2016 |
|
RU2626154C1 |
| Устройство для лова рыбы | 1989 |
|
SU1644860A1 |
| УСТРОЙСТВО ДЛЯ ЛОВА РЫБЫ И МОРСКИХ БЕСПОЗВОНОЧНЫХ | 2008 |
|
RU2378827C1 |
| Способ лова гидробионтов рыбонасосной установкой | 1990 |
|
SU1784155A1 |
| Устройство для лова рыбы | 1990 |
|
SU1750536A1 |
| УСТРОЙСТВО ДЛЯ ЛОВА РЫБЫ И МОРСКИХ БЕСПОЗВОНОЧНЫХ | 1999 |
|
RU2170012C1 |
| Способ лова гидробионтов | 1989 |
|
SU1746972A1 |
| Способ лова гидробионтов | 1988 |
|
SU1792603A1 |
СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ЛОВОМ РЫБЫ РЫБОНАСОСОМ, содержащая датчик концентрации рыбы с сигнализатором минимальной концентрации, соединенный с исполнительным механизмом спуска, и датчик глубины залавливающего устройства с сигнализаторами нижнего и верхнего горизонтов, последний из которых соединен с исполнительным механизмом подъема, отличающаяся тем, что, с целью повыщения производительности путем обеспечения возможности облова нижнего горизонта, она снабжена- последовательно установленными элементами памяти, задержки и логическим элементом И, при этом вход элемента памяти связан с сигнализаторами нижнего и верхнего . уровня, а выход - с исполнительным механизмом спуска, причем вход логического элемента И связан с датчиком концентрации при помощи сигнализатора минимальной концентрации.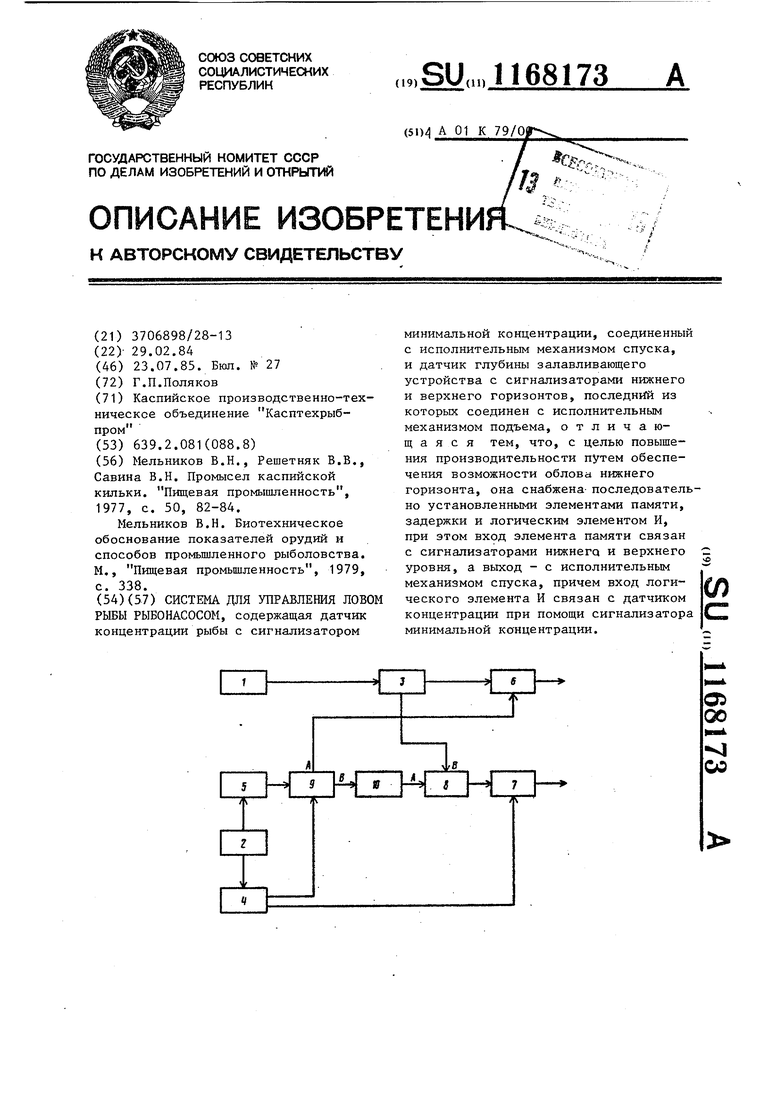
| Мельников В.Н., Решетник В.В., Савина В.Н | |||
| Промысел каспийской кильки | |||
| Пищевая промышленность, 1977, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Мельников В.Н | |||
| Биотехническое обоснование показателей орудий и способов промьпиленного рыболовства | |||
| М., Пищевая промьшленность, 1979, с | |||
| Чемодан с сигнальным замком | 1922 |
|
SU338A1 |
