00
00
00 со
Изобретение относится к вибровозбудителям и может быть использовано в строительных, дорожных и горных машинах для создания вибрации.
Цель изобретения - повышение надежности за счет уменьшения резонансных динамических нагрузок.
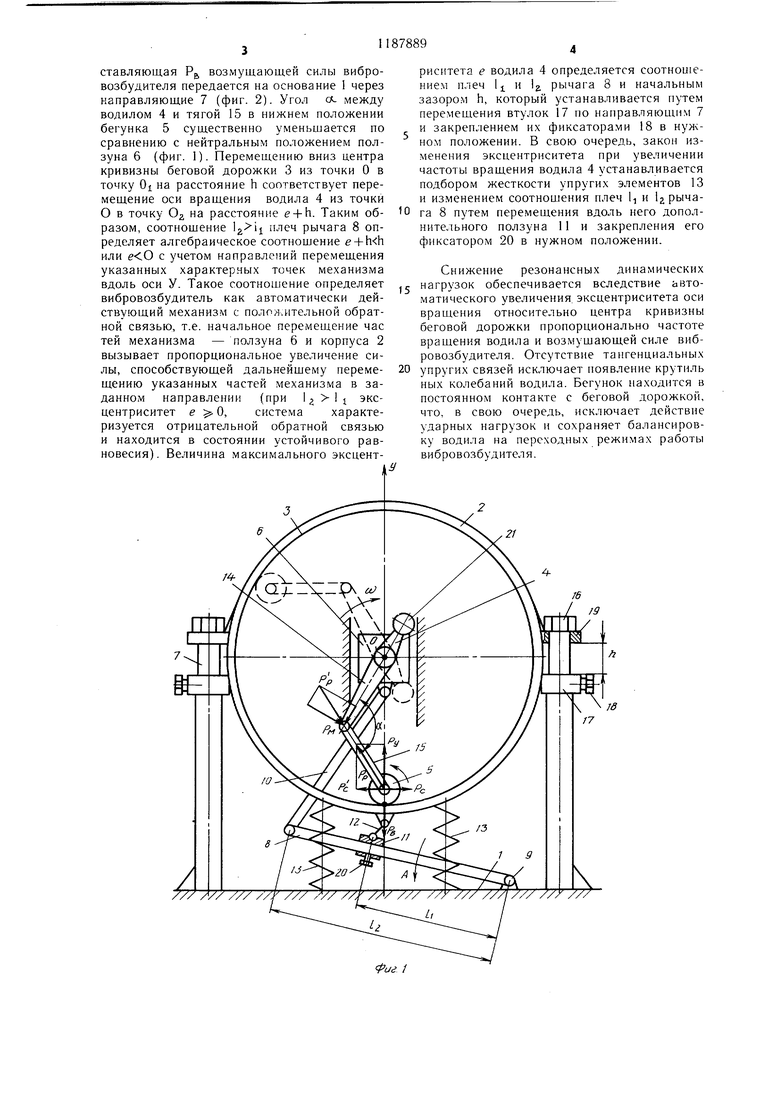
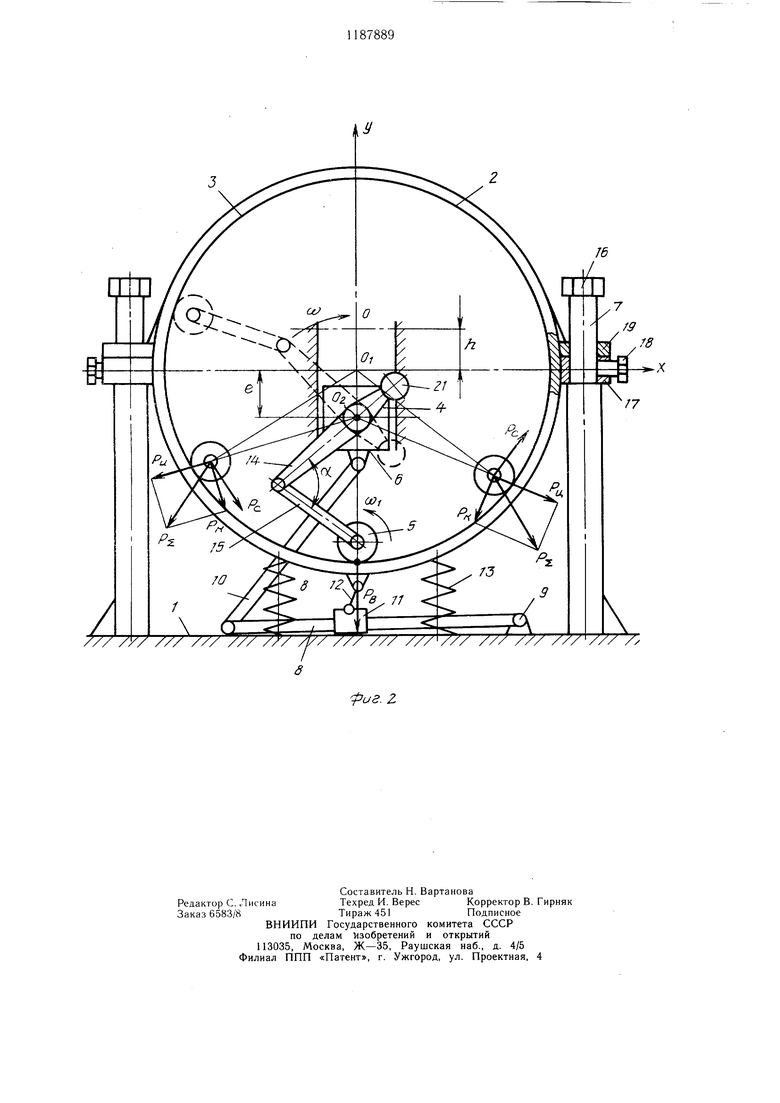
На фиг. 1 схематически изображен предлагаемый вибровозбудитель в начальной стадии переходного процесса при разгоне; на фиг. 2 - то же, в конечной стадии переходного процесса и при установившемся режиме.
Вибровозбудитель содержит основание 1, цилиндрический корпус 2 с внутренней беговой дорожкой 3, установленное в нем водило 4, связанный с ним бегунок 5, взаимодействующий с беговой дорожкой 3, ползун 6, установленный в корпусе 2 с возможностью радиального перемещения вдоль оси Y, две параллельные направляющие 7, жестко закрепленные на основании 1, установленный с возможностью поворота в плоскости вращения водила рычаг 8, одним концом при помощи шарнира 9 связанный с основанием 1, тягу 10, одним концом связанную с ползуном б, а другим - шарнирно с вторым концом рычага 8, установленный на рычаге 8 с возможностью перемещения вдоль него дополнительный ползун 11, вторую тягу 12, связанную с ползуном 1 одним концом, а другим концом - с корпусом 2, упругие элементы 13, установленные между корпусом 2 и основанием 1. Корпус 2 установлен в направляющих 7 с возможностью ограниченного перемещения, а водило 4 выполнено в виде дополнительного рычага 14, одним концом связанного с ползуном 6, и третьей тяги 15, одним концом связанной с бегунком 5, а другим - щарнирно со свободным концом дополнительного рычага 14. Ограничитель перемещения корпуса 2 выполнен в виде упора 16 и втулки 17 с фиксатором 18, закрепленных направляющей 7, и проущины 10, закрепленной на корпусе 2, охватывающей направляющую 7 и размещенной между упором 16 и втулкой 17. Возможность перемещения дополнительного ползуна 11 вдоль рычага 8 обеспечивается при помоцли фиксатора 20. Динамическая уравновешенность водила 4 обеспечивается противовесом 21.
Вибровозбудитель работает следующим образом.
В статическом положении вибровозбудителя при запуске двигателя ось вращения водила 4 совпадает с центром кривизны О беговой дорожки 3 (фиг. 1), рычаг 8 повернут вокруг шарнира 9 вверх до упора, корпус 2 под действием упругих элементов 13 занимает крайнее верхнее положение, причем между проушинами 19 и втулками 17 образован зазор h. Вращение водила 4 с угловой скоростью (Л) обеспечивает действие
на беговую дорожку 3 со стороны бегунка 5 центробежной силы, которая при расположении этого бегунка на вертикальной оси У равна вертикальной силе РБ- Данной сис ле РВ соответствует сопротивление Ра качению бегунка, а в тяге 15 возникает растягивающее усилие Рр, нор.мальная к радиусу вращения составляющая которого равна сопротивлению Р. Приведенное к концу водила 4 растягивающее усилие Рр расклады0 вается на силу P, нормальную к радиусу вращения и определяющую момент сопротивления вращению водила 4, и силу, действующую вдоль водила в радиальном направлении. Проекция растягивающей силы Рр на
5 вертикальную ось Ру вычитается из вертикальной силы РВ, однако вследствие .малой величины коэффициента трения качения бегунка 5, силы PC. и Ру много меньще вертикальной силы Рц.
Под действием вертикальной силы Р происходит сжатие упругих элементов 13 и поворот вниз в направлении стрелки А (фиг. 1) рычага 8. Соответственно корпус 2 перемещается вниз в направляющих 7, а ползун 6 с водилом 4 перемещается под действием
5 тяги 10, причем из соотнощения следует, что перемещение ползуна 6 больше перемещения корпуса 2 для одного и того же угла поворота рычага 8. Упоры 16 на направляющих 7 обеспечивают развитие процесса перемещения всей системы только в одном
0 направлении относительно точки равновесия О, в данном случае - вниз. Таким образом, по мере пере.мещения вниз корпуса 2 и ползуна 6 возникает и непрерывно увеличивается эксцентриситет 1 (фиг. 2) между осью вращения водила 4 и
центром кривизны беговой дорожки 3 Наличие эксцентриситета I (фиг. 2) определяет переменный радиус вращения бегунка 5 относительно оси вращения водила 4. При этом помимо центробежной силы Рц, действующей на бегунок 5 и направленной вдоль радиуса вращения, появляется кориолисова сила РК, нормальная к радиусу вращения. Кориолисова сила Р, совпадает с направлением движения бегунка 5, при уменьшении радиуса его вращения относительно водила 1 и направлена противоположно движению бегунка 5 при увеличении указанного радиуса вращения. Геометрическая сумма Pj центробежной силы Рц и кориолисовой силы РК является возмущающей силой вибровозQ будителя, причем ее проекция на ось У ориентирована всегла вниз, в сторону смещения водила 1 на эксцентриситет е относительно центра кривизны беговой дорожки 3. Вертикальные колебания корпуса 2 в процессе его перемещения по направляющим 7 исключаются действием силы инерции самим корпусом 2 в направлении оси У.
При выбранном зазоре h проушины 19 упираются во втулки 17 и вертикальная составляющая Р возмущающей силы вибровозбудителя передается на основание 1 через направляющие 7 (фиг. 2). Угол х между водилом 4 и тягой 15 в нижнем положении бегунка 5 существенно уменьшается по сравнению с нейтральным положением ползуна 6 (фиг. 1). Перемещению вниз центра кривизны беговой дорожки 3 из точки О в точку Oi на расстояние h соответствует перемещение оси вращения водила 4 из точки О в точку Ог, на расстояние e + h. Таким образом, соотнощение i плеч рычага 8 определяет алгебраическое соотношение e + или с учетом направлений перемещения указанных характерных точек механизма вдоль оси У. Такое соотношение определяет вибровозбудитель как автоматически действующий механизм с положительной обратной связью, т.е. начальное перемепление час тей механизма - ползуна 6 и корпуса 2 вызывает пропорциональное увеличение силы, способствующей дальнейщему перемещению указанных частей механизма в заданном направлении (при эксцентриситет е О, система характеризуется отрицательной обратной связью и находится в состоянии устойчивого равновесия). Величина максимального эксцентриситета е водила 4 определяется соотношением плеч 1 и 2. рычага 8 и начальным зазоро.м h, который устанавливается путем перемещения втулок 17 по направляющим 7 и закреплением их фиксаторами 18 в нужном положении. В свою очередь, закон изменения эксцентриситета при увеличении частоты вращения водила 4 устанавливается подбором жесткости упругих элементов 13 и изменением соотношения плеч 1, и Ij рычага 8 путем перемещения вдоль него дополнительного ползуна 11 и закрепления его фиксатором 20 в нужном положении. Снижение резонансных динамических нагрузок обеспечивается вследствие автоматического увеличения эксцентриситета оси вращения относительно центра кривизны беговой дорожки пропорционально частоте вращения водила и возмущающей силе вибровозбудителя. Отсутствие тангенциальных упругих связей исключает появление крутиль ных колебаний водила. Бегунок находится в постоянном контакте с беговой дорожкой, что, в свою очередь, исключает действие ударных нагрузок и сохраняет балансировку водила на переходных режимах работы вибровозбудителя. ///
fua. Z /X
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 1991 |
|
RU2030928C1 |
| Планетарный вибровозбудитель | 1991 |
|
SU1810125A1 |
| Планетарный вибровозбудитель | 1991 |
|
SU1804917A1 |
| ПЛАНЕТАРНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 1991 |
|
RU2015748C1 |
| Планетарный вибровозбудитель | 1990 |
|
SU1738379A1 |
| Планетарный вибровозбудитель | 1990 |
|
SU1717261A2 |
| Планетарный вибровозбудитель | 1990 |
|
SU1727930A2 |
| Планетарный вибровозбудитель | 1988 |
|
SU1562030A1 |
| Валец вибрационного катка | 1990 |
|
SU1765273A1 |
| Планетарный вибровозбудитель | 1986 |
|
SU1359000A1 |
ВИБРОВОЗБУДИТЕЛЬ, содержащий основание, цилиндрический корпус с внутренней беговой дорожкой, установленное в нем водило и связанный с ним бегунок, взаимодействующий с беговой дорожкой, отличающийся тем, что, с целью повышения надежности путем уменьшения резонансных циклических нагрузок, он снабжен ползуном, установленным в корпусе с возможностью радиального перемещения, двумя параллельными направляющими, жестко закрепленными на основании, установленным с возможностью поворота в плоскости вращения водила рычагом, одним концом шарнирно связанным с основанием, тягой, одннм концом соединенной с ползуном, а другим - с вторым концом рычага, установленным на рычаге с возможностью перемещения вдоль него дополнительным ползуном, второй тягой, связанной с носледним одннм концом, ;i другим - с корпусом, и упругими алемешами. установленными между корпусом и основаннем, корпус установлен в нанравляющих с возможностью ограниченного перемещения, а водило выполнено в виде дополнительного рычага, одним концом связанного с ползуном, и третьей тяги, одним концом связанной с бегунком, а другим - с свободным концом дополнительного рычага.д 2. Вибровозбудитель по п. 1, отличающий- S ся тем, что ограничитель перемещения кор(Л пуса выполнен в виде упора и втулки с фиксатором, закрепленных на направляющей, и проушины, закрепленной на корпусе, охватывающей направляющую и размещенной между упором и втулкой.
| Вибратор бегункового типа | 1977 |
|
SU640763A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
