Изобретение относится к автоматике и телемеханике, а именно к бесконтактным коммутирующим устройствам с механическим управлением.
Целью изобретения является снижение энергопотребления за счет уменьшения количества одновременно включенных датчиков.
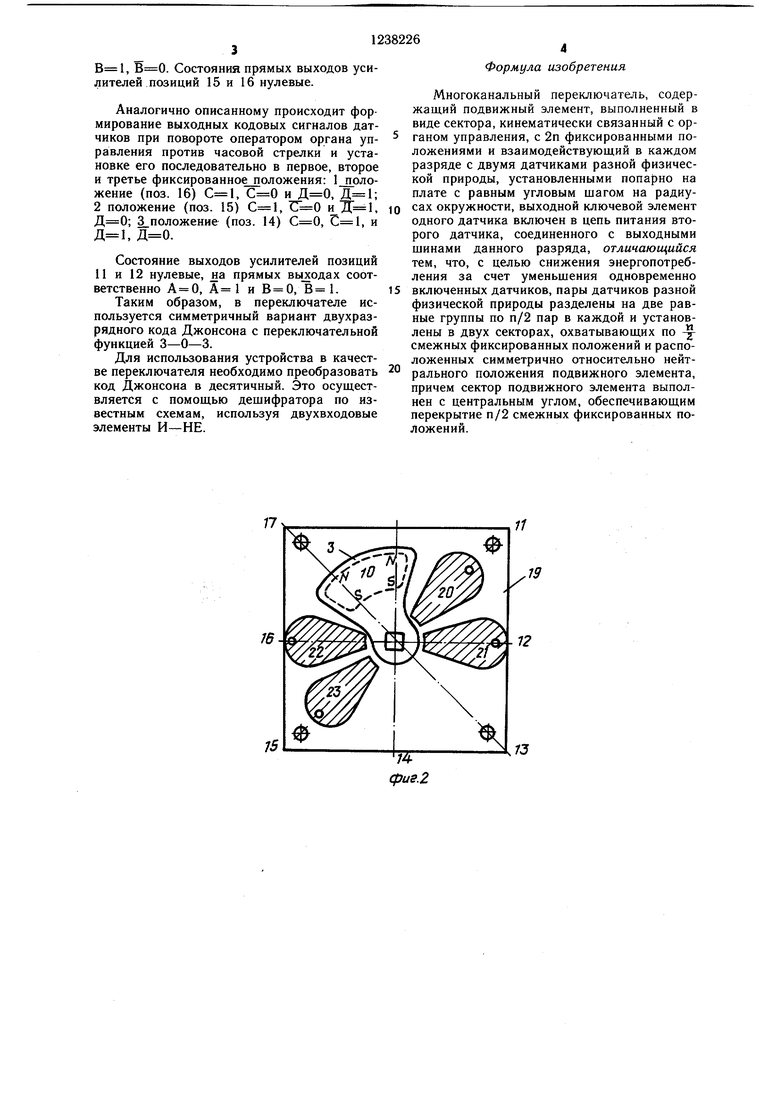
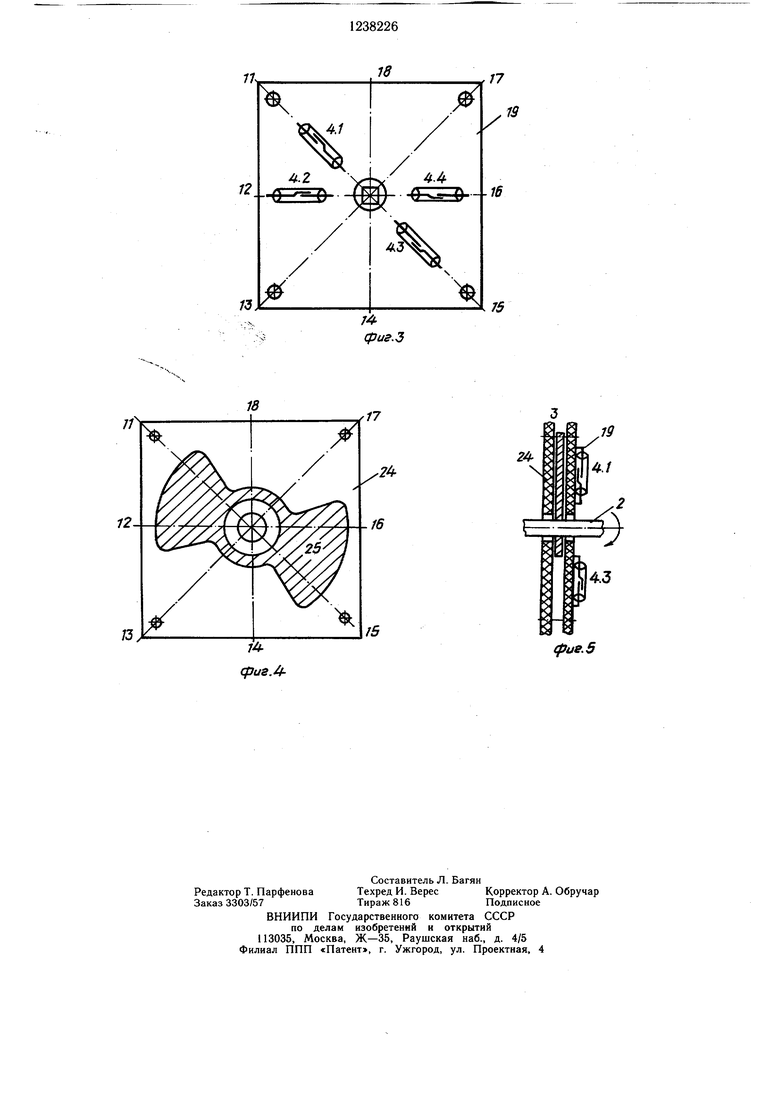
На фиг. 1 представлена функциональная схема одной рз- тозиций переключателя; на фиг. . 2 - констру1ф,ия платы с дискретными электродами й подвижным эле- менсгом; на фиг. 3 - внешняя сторона платы с дисК|)тными электродами и установленными -йа неи.,магн итоупр авляемыми контактами; на иг. 4 - конструкция платы с общим электродом; на фиг. 5 - задаюш,ее устройство переключателя в сборе.
Переключатель содержит орган управления 1 поворотного типа, на выходной оси 2 которого закреплен подвижный элемент 3, взаимодействуюший одновременно с парой датчиков - с одним из магнитоуправляе- мых контактов 4.1-4.4 и одним из емкостных датчиков 5, выполненным в виде плоскопараллельного конденсатора 6, обший электрод которого подключен к обплей шине источника питания, а второй дискретный электрод включен в контур автогенератора на операционном усилителе 7, выход которого соединен с входом амплитудного детектора 8 с выходным усилителем 9, имеющим прямой и инверсный выходы, (соответственно А и А.). Подвижный элемент 3 выполнен в виде сектора из магнито- 30 твердого материала и локально намагничен в радиальном направлении в зоне 10 в виде дугообразной дорожки. Переключатель имеет восемь фиксированных позиций 11-18 подвижного элемента, причем датчики устаВ исходном состоянии при включенном источнике питания-1-U орган управления 1 зафиксирован в нейтральном вертикальном положении. Подвижный элемент 3 занимает фиксированное положение, изображенное на
5 фиг. 2.
В этом положении подвижный элемент не взаимодействует с позиционными датчиками (парами магнитоуправляемый контакт - емкостной датчик), установленными на позици10 ях 11, 12 и 15, 16. Магнитоуправляемые контакты 4.1, 4.2, 4.3, 4.4 разомкнуты, а цепи питания операционных усилителей 7 отклю чены от шины питания (-HJ). На выходах усилителей позиционных емкостных датчиков формируются нулевые сигналы на прямых вы
5 ходах , , , и единичные сигналы на HjiBepcHHx вызшдах тех же усилителей , , , .
При установке оператором органа управ- 2Q ления в первое фиксированное положение.
т.е. при повороте рукоятки по часовой стрелке, подвижный элемент 3 фиксируется в позиции 11, при этом он взаимодействует с парой датчиков. Сначала замыкается магнитоуправляемый контакт 4.1, подключая 25 к шине питания (-KJ) цепь питания операционного усилителя 7. Так как емкость плоскопараллельного конденсатора, составленного из дискретного электрода 20 и общего электрода 25, расположенных на платах 19 и 24, имеет максимальное значение за счет введенного в воздушный зазор подвижного элемента из проводящего материала и превышает пороговое значение, то операционный усилитель 7 возбуждается. Положительной полярности импульсы с его выхода поступают на вход амплитудного
новлены только на четырех позициях 11, 12, детектора 8. На выходе последнего форми15 и 16 симметрично относительно нейтрального положения подвижного элемента. На внутренней поверхности платы 19 расположены дискретные электроды 20, 21 и 22, 23. На внешней стороне платы 19 соосно этим электродам установлены магнито- управляемые контакты 4.1, 4.2, 4.3, 4.4. На второй плате 24 задающего устройства, на ее внутренней поверхности, расположен общий электрод 25. Платы 19 и 24 установруется положительное напряжение, превышающее порог срабатывания выходного усилителя 9, и на его выходах формируются следующие сигналы , . Состояния 4Q выходов остальных усилителей не изменились и имеют нулевые значения на прямых выходах. При установке оператором органа управления во второе фиксированное положение, т.е. при повороте рукоятки в ту же сторону, подвижный элемент 3 взаимодейлены неподвижно с воздушным зазором 45 ствует одновременно с двумя парами позимежду ними, в котором перемещается, занимая ряд фиксированных угловых положений, подвижный элемент 3. Пары датчиков разной физической природы разделены на две равные группы по п/2 пар в каждой и
ционных датчиков, установленных на позициях 11 и 12. Замыкаются магнитоуправ- ляемые контакты 4.1 и 4.2 и возбуждены автогенераторы емкостных датчиков позиций 11 и 12. На выходах соответствующих усиустановлены в двух секторах, охватываю- 50 лителей 9 формируются соответствующие
щих по п/2 смежных фиксированных положений и расположенных симметрично относительно нейтрального положения подвижного элемента 3.
Сектор подвижного элемента выполнен с центральным углом, обеспечивающим перекрытие п/2 смежных фиксированных положений.
55
сигналы: , , , . Состояния выходов позиционных датчиков на позициях 15 и 16 не меняются. В третьем фиксированном положении органа управления подвижный элемент 3 взаимодействует только с парой датчиков, установленных на позициях 12 с формированием соответствующих выходных сигналов: , ,
В исходном состоянии при включенном источнике питания-1-U орган управления 1 зафиксирован в нейтральном вертикальном положении. Подвижный элемент 3 занимает фиксированное положение, изображенное на
фиг. 2.
В этом положении подвижный элемент не взаимодействует с позиционными датчиками (парами магнитоуправляемый контакт - емкостной датчик), установленными на позициях 11, 12 и 15, 16. Магнитоуправляемые контакты 4.1, 4.2, 4.3, 4.4 разомкнуты, а цепи питания операционных усилителей 7 отключены от шины питания (-HJ). На выходах усилителей позиционных емкостных датчиков формируются нулевые сигналы на прямых выходах , , , и единичные сигналы на HjiBepcHHx вызшдах тех же усилителей , , , .
При установке оператором органа управ- ления в первое фиксированное положение.
т.е. при повороте рукоятки по часовой стрелке, подвижный элемент 3 фиксируется в позиции 11, при этом он взаимодействует с парой датчиков. Сначала замыкается магнитоуправляемый контакт 4.1, подключая к шине питания (-KJ) цепь питания операционного усилителя 7. Так как емкость плоскопараллельного конденсатора, составленного из дискретного электрода 20 и общего электрода 25, расположенных на платах 19 и 24, имеет максимальное значение за счет введенного в воздушный зазор подвижного элемента из проводящего материала и превышает пороговое значение, то операционный усилитель 7 возбуждается. Положительной полярности импульсы с его выхода поступают на вход амплитудного
детектора 8. На выходе последнего формируется положительное напряжение, превышающее порог срабатывания выходного усилителя 9, и на его выходах формируются следующие сигналы , . Состояния выходов остальных усилителей не изменились и имеют нулевые значения на прямых выходах. При установке оператором органа управления во второе фиксированное положение, т.е. при повороте рукоятки в ту же сторону, подвижный элемент 3 взаимодейционных датчиков, установленных на позициях 11 и 12. Замыкаются магнитоуправ- ляемые контакты 4.1 и 4.2 и возбуждены автогенераторы емкостных датчиков позиций 11 и 12. На выходах соответствующих усилителей 9 формируются соответствующие
лителей 9 формируются соответствующие
сигналы: , , , . Состояния выходов позиционных датчиков на позициях 15 и 16 не меняются. В третьем фиксированном положении органа управления подвижный элемент 3 взаимодействует только с парой датчиков, установленных на позициях 12 с формированием соответствующих выходных сигналов: , ,
, . Состояния прямых выходов усилителей позиций 15 и 16 нулевые.
Аналогично описанному происходит формирование выходных кодовых сигналов датчиков при повороте оператором органа управления против часовой стрелки и установке его последовательно в первое, второе и третье фиксированное оложения: 1 поло- жение (поз. 16) , и ,
Формула изобретения
Многоканальный переключатель, содержащий подвижный элемент, выполненный в виде сектора, кинематически связанный с органом управления, с 2п фиксированными положениями и взаимодействующий в каждом разряде с двумя датчиками разной физической природы, установленными попарно на плате с равным угловым шагом на радиу2 положение (поз. 15) , и 1. 10 сах окружности, выходной ключевой элемент 3 положение (поз. 14) , , и , .
одного датчика включен в цепь питания второго датчика, соединенного с выходными шинами данного разряда, отличающийся тем, что, с целью снижения энергопотребления за счет уменьшения одновременно включенных датчиков, пары датчиков разной физической природы разделены на две равные группы по п/2 пар в каждой и установлены в двух секторах, охватывающих по смежных фиксированных положений и расположенных симметрично относительно нейтрального положения подвижного элемента, причем сектор подвижного элемента выполнен с центральным углом, обеспечивающим перекрытие п/2 смежных фиксированных положений.
Состояние выходов усилителей позиций 11 и 12 нулевые, на прямых вы содах соответственно А 0, А 1 и В 0, .
Таким образом, в переключателе используется симметричный вариант двухразрядного кода Джонсона с переключательной функцией 3-О-3.
Для использования устройства в качестве переключателя необходимо преобразовать код Джонсона в десятичный. Это осуществляется с помощью дешифратора по известным схемам, используя двухвходовые элементы И-НЕ.
Формула изобретения
Многоканальный переключатель, содержащий подвижный элемент, выполненный в виде сектора, кинематически связанный с органом управления, с 2п фиксированными положениями и взаимодействующий в каждом разряде с двумя датчиками разной физической природы, установленными попарно на плате с равным угловым шагом на радиусах окружности, выходной ключевой элемент
сах окружности, выходной ключевой элемент
одного датчика включен в цепь питания второго датчика, соединенного с выходными шинами данного разряда, отличающийся тем, что, с целью снижения энергопотребления за счет уменьшения одновременно включенных датчиков, пары датчиков разной физической природы разделены на две равные группы по п/2 пар в каждой и установлены в двух секторах, охватывающих по смежных фиксированных положений и расположенных симметрично относительно нейтрального положения подвижного элемента, причем сектор подвижного элемента выполнен с центральным углом, обеспечивающим перекрытие п/2 смежных фиксированных положений.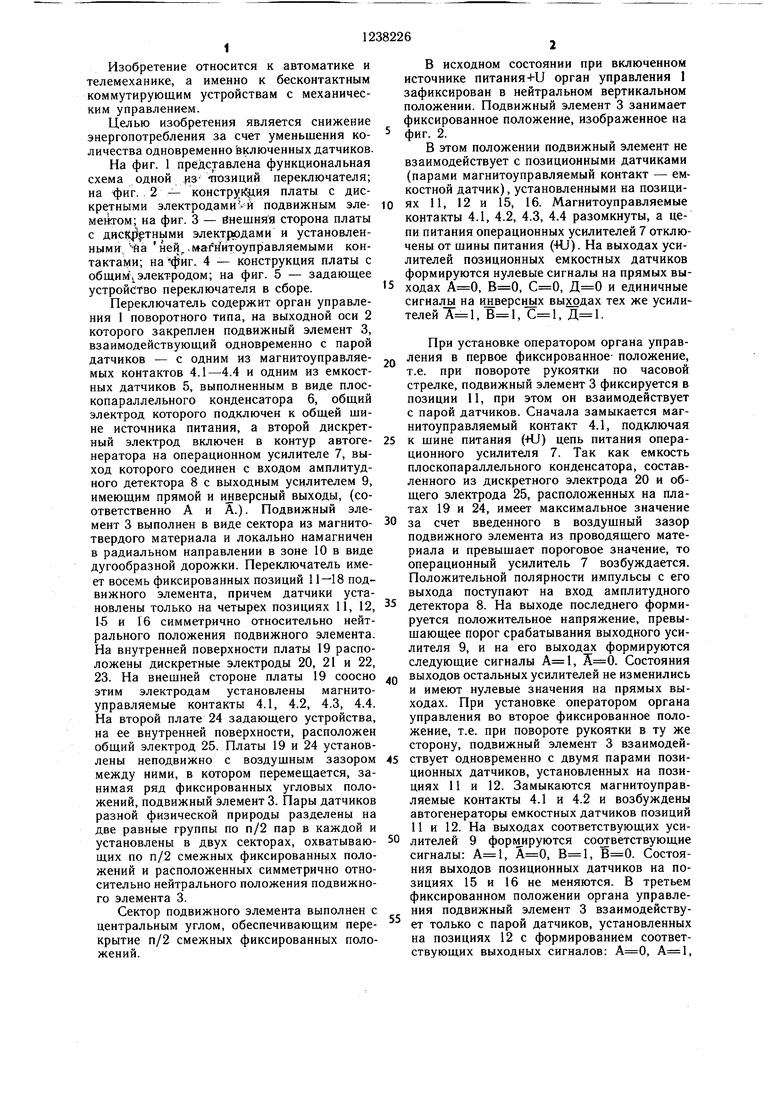
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный переключатель | 1984 |
|
SU1188878A1 |
| Многоканальный переключатель | 1983 |
|
SU1109905A1 |
| Многоканальный переключатель | 1986 |
|
SU1398088A1 |
| Бесконтактный позиционный переключатель | 1986 |
|
SU1319272A1 |
| Бесконтактный кодирующий переключатель | 1986 |
|
SU1328935A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ НЕПОДВИЖНОГО СОСТОЯНИЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2051473C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, ИМЕЮЩИЙ ДВА ДИАПАЗОНА ИЗМЕРЕНИЯ | 2016 |
|
RU2697011C1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |
| УСТРОЙСТВО ДЛЯ НИЗКОЧАСТОТНОЙ ТЕРАПИИ | 1992 |
|
RU2020979C1 |
| Устройство дистанционного управления угольным комбайном с пневмоприводом | 1984 |
|
SU1190029A1 |
Изобретение относится к автоматике и телемеханике и, в частности к бесконтактным коммутирующим устройствам с механическим управлением. Цель изобретения - снижение энергопотребления - достигается путем уменьшения количества одновременно включенных датчиков. Переключатель содержит орган управления 1 поворотного типа, на оси 2 которого закреплен подвижный элемент 3, взаимодействующий одновременно с датчиком 4 из магнитоуп- равляемых контактов и одним из емкостных датчиков 5, выполненным в виде плоскопараллельного конденсатора 6, общий электрод которого подключен к общей щине питания, а дискретный электрод включен в контур автогенератора на операционном усилителе 7. Переключатель также содержит амплитудный детектор 8 и усилитель 9, позициями А и Д соответственно обозначены прямой и инверсный его выходы. В описании изобретения приводятся чертежи, поясняющие конструкцию платы с установленными на ней магнитоуправляемыми контактами. 5 ил. i (Л L..± 4 / 4 ю со 00 1C ю Од i
/7
75
13
7А
/3
/Л
17
фие.5
| Многоканальный переключатель | 1983 |
|
SU1109905A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Многоканальный переключатель | 1984 |
|
SU1188878A1 |
