2. Опора ,отличаю- щ а я с я тем, что. диаметр понтона-поплавка определяется по формуле
-. -20 ZuJo
DM,35.3.к(е ,).-
/
где К - число понтонов-поплавков; d - диаметр опорной стойки, м;
II
Изобретение относится к области строительства морских сооружений и может быть использовано в опорах глубоководных платформ -для морской добычи нефти и газа.
Цель изобретения - снижение материалоемкости.
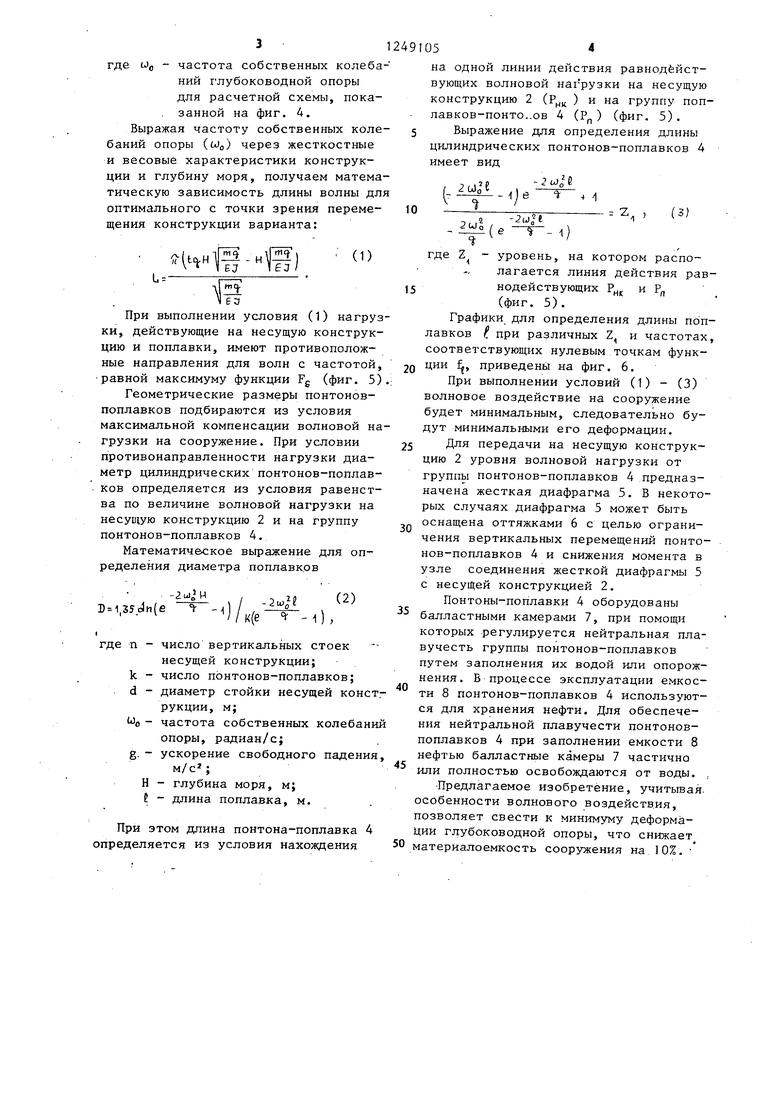
На фиг, 1 схематично показана глубоководная опора, общий вид; на фиг. 2 - разрез А-А на фиг,, 1; на фиг. 3 - график функций, определяющих реакцию глубоководной опоры на волновые воздействия; на фиг. 4 - рачетная схема для определения частоты собственных колебаний (); на фиг. 5 - схема приложения сил на опору; на фиг. 6 - график длин поплавков.
-Рабочая площадка 1 опирается на несущую конструкцию 2 башенного типа с опорными стойками 3, установленную на дне моря, к которой консольно прикреплены понтоны-поплавки 4 с помощью жесткой диафрагмы 5. В некоторых случаях диафрагма 5 может быть снабжена оттяжками 6. Понтоны-поплавки 4 .расположены в плоскости, перпендикулярной распространению максимальной волны. Внутренняя полость понтона-поплавка 4 имеет балластную камеру 7 и емкость 8 для заполнения их воздухом или нефтью.
Понтоны-поплавки 4 испо.льзуются для снижения деформаций глубоководной опоры. Этим учитывается специфика волнового воздействия на несущую конструкцию.
Морское волнение представляет собой случайный стационарный эрго- дический процесс с нулевым гауссов- .ским распределением, который может
п - количество стоек; (Jfl - частота собственных колебаний несущей конструкции, рад/с;
t - длина понтона- поплавка, м, 3. -Опора по п.2, отличающая с я тем, что часть внутреннего пространства понтонов-поплавков заполнена нефтью.
быть представлен спектральной плотностью волновых осцилляции (колебаний) на поверхности моря. Спектр перемещений несущей конструкции от
воздействия волн является произведением спектра поверхностных волн S передаточную функцию F , характеризующую жесткостные и демпфирующие свойства конструкции в водной
среде, и .на функцию fj , характеризующую корреляцию волновой нагрузки вдоль направления распространения волн (фиг. 3).
Перемещение, конструкции будет
минимальным при совпадении частоты ее собственных колебаний (т.е. частоты максимума функции Fg) с нулевой точкой функции f«. Причем частота нулевых точек функции fj соответствует длинам волн, которые находятся . в следующей зависимости от расстояния между вертикальной осью несущей конструкции 2 и плоскостью, в которой расположены вертикальные оси
понтонов-поплавков 4;
0,5+i
где i 0,1,2 ... - порядковый номер нулевой точки по направлению возрастания частот; L - расстояние между понтонами и вертикальной осью несущей конструкции, м.
. Рассмотренному случаю совпадения максимума функции Fg с первой нулевой точкой функции fj соответствует условие
L rt-g/(.,
3 1249;
где Ufl - частота собственных колебаний глубоководной опоры для расчетной схемы, показанной на фиг. 4.
Выражая частоту собственных коле- 5 баний опоры (Wo) через жесткостные и весовые характеристики конструкции и глубину моря, получаем математическую зависимость длины волны для оптимального с точки зрения переме- 10 щения конструкции варианта:
пчне-ш1
L При выполнении условия (1) нагрузки, действующие на несущую конструкцию и поплавки, имеют противоположные направления для волн с частотой, равной максимуму функции Fg (фиг. 5)
Геометрические размеры понтонов- поплавков подбираются из условия максимальной компенсации волновой нагрузки на сооружение. При условии противонаправленности нагрузки диаметр цилиндрических понтонов-поплавков определяется из условия равенства по величине волновой нагрузки на несущую конструкцию 2 и на группу понтонов-поплавков 4.
Математическое выражение для определения диаметра поплавков
-2и,„Ч
(2)
к(е --
где п - число вертикальных стоек
несущей конструкции; k - число понтонов-поплавков; d - диаметр стойки несущей конст,рукции, м; (о - частота собственных колебаний
опоры, радиан/с; g. - ускорение свободного падения,
Н - глубина моря, м; Р - длина поплавка, м.
При этом длина понтона-поплавка 4 определяется из условия нахождения
54
на одной линии действия равнодействующих волновой наг рузки на несущую конструкцию 2 (РНК ) и на группу поп- лавков-noHTO..OB 4 (Р ) (фиг. 5) .
Выражение для определения длины цилиндрических понтонов-поплавков 4 имеет вид
,i4 - 2 u)o е
(.je-T-.,
) (3)
2u;
- : Z.
1)
грузрукжтой, . 5).,
ов- нааавнстнау
п)
; нст,аний
ния,
а 4 я
20
25
30
35
40
15
45
50
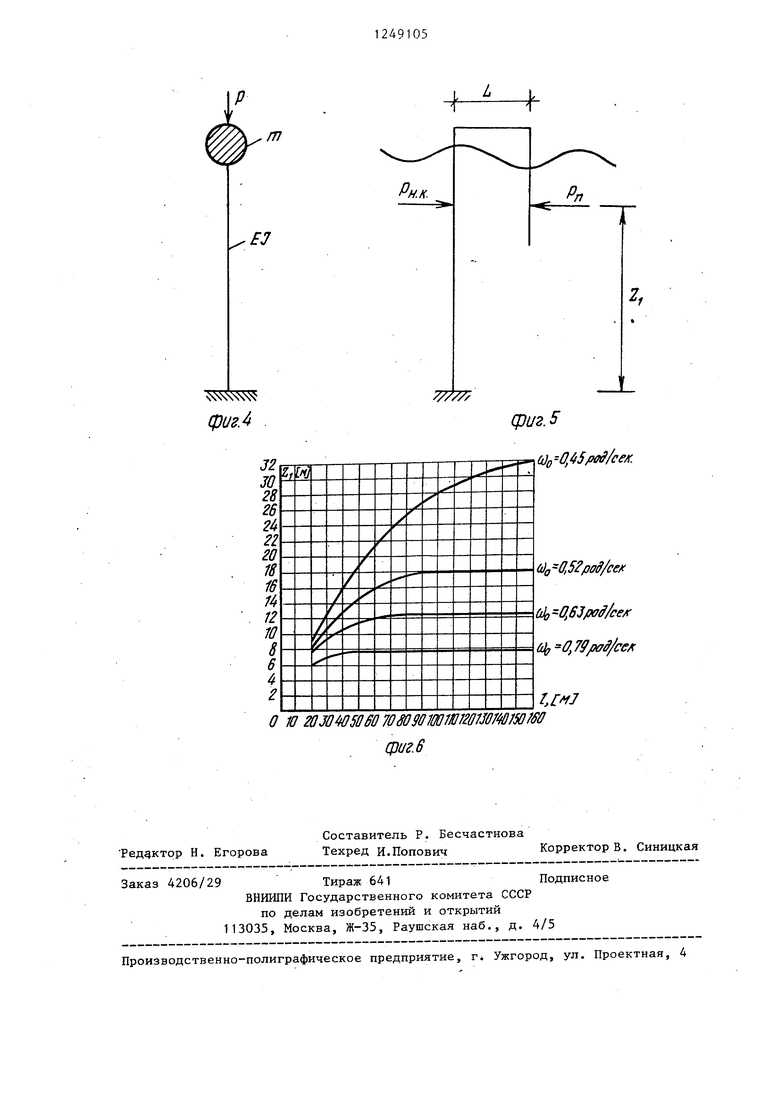
где Z - уровень, на котором располагается линия действия равнодействующих и Pf, (фиг. 5).
Графики для определения длины поплавков ( при различных Z и частотах, соответствующих нулевым точкам функции f, приведены на фиг. 6.
При выполнении условий (1) - (3) волновое воздействие на сооружение будет минимальным, следовательно будут минимальными его деформации.
Для передачи на несущую конструкцию 2 уровня волновой нагрузки от группы понтонов-поплавков 4 предназначена жесткая диафрагма 5. В некоторых случаях диафрагма 5 может быть оснащена оттяжками 6 с целью ограничения вертикальных перемещений понтонов-поплавков 4 и снижения момента в узле соединения жесткой диафрагмы 5 с несущей конструкцией 2.
Понтоны-поплавки 4 оборудованы балластными камерами 7, при помощи которых регулируется нейтральная плавучесть группы понтонов-поплавков путем заполнения их водой или опорожнения. В процессе эксплуатации емкости 8 понтонов-поплавков 4 используются для хранения нефти. Для обеспечения нейтральной плавучести понтонов- поплавков 4 при заполнении емкости 8 нефтью балластные камеры 7 частично или полностью освобождаются от воды. , Предлагаемое изобретение, учитьгеая. особенности волнового воздействия, позволяет свести к минимуму деформации глубоководной опоры, что снижает материалоемкость сооружения на 10%.
::;™11
ери г. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Глубоководная опора | 1985 |
|
SU1320327A1 |
| Глубоководная опора | 1985 |
|
SU1330261A1 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| ПЛАВУЧАЯ МОРСКАЯ ПЛАТФОРМА И ЦЕНТРАЛЬНАЯ ОТКРЫТАЯ КИЛЕВАЯ ПЛАСТИНА | 2013 |
|
RU2603172C2 |
| ПЛАВУЧАЯ ПЕРЕПРАВА С ПЛАВУЧИМ МОДУЛЕМ И ПЛАВУЧЕЙ ОПОРОЙ С ПИЛОНОМ | 2018 |
|
RU2699198C1 |
| Глубоководная опора | 1986 |
|
SU1416605A1 |
| МОРСКАЯ ЛЕДОСТОЙКАЯ ПЛАВУЧАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2001 |
|
RU2221917C2 |
| МНОГОАГРЕГАТНАЯ ПЛАВУЧАЯ ПРИБРЕЖНАЯ ВЕТРОФЕРМА | 2002 |
|
RU2258633C2 |
| Морская стационарная платформа для разработки нефтяных месторождений | 1977 |
|
SU1064874A3 |
| Глубоководная опора | 1988 |
|
SU1576655A2 |

физ. 3
+
фиг А
0 Ю 2ajow5oso7oso9omwm7jomm№o ф1/г.б
Теддктор Н. Егорова
Составитель Р. Бесчастнова
Техред И.ПоповичКорректор В. Синицкая
Заказ 4206/29Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г Ужгород, ул. Проектная, 4
/////
(puz.S
,4S/ffff/ce/f.
(i),5 pog/cef
(i),63flog/ce ag OJ9/K7ff/ce
| Патент США № 3859804, .кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4007598, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
