Изобретение относится к электро- технике и может быть использовано в тяговых электроприводах, в которых необходимы механические характеристики, близкие к характеристике равной мощности.
Цель изобретения - расширение функциональных возможностей путем обеспечения формирования механической характеристики, близкой к характеристике равной мощности.
На фиг. 1 изображена схема вентильного электродвигателя (ВД); на фиг. 2 - временные характерисТ1; ки, поясняющие принцип работы ВД; на фиг. 3 - механические характеристики ВД.
ВД (фиг. 1) содержит секции 1-А якорной обмотки, подключенные к источнику 5 питания через транзисторы 6-9 коммутатора. Управляющие входы транзисторов 6-9 через устройство 10 задержки подключены к выходу датчика
11положения ротора (ДПР). В цепи питания двигателя содержится датчик
12потребляемого тока, управляющий вход которого подключен к выходу устройства 13 управления, а выход - к входу устройства 10 задержки.
Устройство 10 задержки не пропускает сигнал с выхода ДПР 11 на управляющие входы транзисторов 6-9 в те- . чение времениt. , которое определяется величиной сигнала обратной связи по току, поступающего с выхода датчика 12 тока. Так как потребляемый двигателем ток пропорционален моменту нагрузки, время задержки пропорционально моменту нагрузки двигателя Глубина сигнала обратной связи по току определяется величиной сигнала, поступающего с устройства 13.
Рассмотрим вначале работу ВД при фиксированном времени задержки t, , при отсутствии обратной связи по тог ку (временные диаграммы на фиг. 2).
При вращении ротора ВД с частотой 4J ДПР 11 вырабатьюает двухполяр ное напряжение U с периодом Т 2Tl/uJ . В момент скачкообразного изменения напряжения Uo на выходе ДПР (фип. 2 а, напрмер, при t 0) начинается отсчет времени задержки (фиг. 2о), в течение которого устройство задержки не пропускает сигнал ДПР на управляющие входы тран- .зисторов 6-9 коммутатора, и якорная обмотка ВД отключена от источника
питания. По окончании времени t устройство задержки разрешает пpoкoждe r ние сигнала с выхода ДПР, что приводит к скачкообразному увеличенрш тоKaiS в цепях управления тех транзисторов коммутатора, которые соответствуют положению ротора ВД (фиг. 2& ). При t ) происходит изменение полярности напряжения U на
выходе ДПР (фиг. 2а ). С этого момента снова начинается процесс формирования времени задержки, в течение которого ток iS в цепях управления транзисторов коммутатора не
протекает (либо очень мал), и они снова оказываются закрытыми (фиг.2в, при t П(цЗ ). В дальнейшем при вращении ротора БД описанные процессы повторяются. Величина времени tj,,
в течение которого протекает им-у пульс тока в цепях управления транзисторов коммутатора, зависит от времени задержки и частоты вращения 0 . При увеличении частоты вращения-, например, из-за уменьшения момента нагрузки на валу ВД умень- ется период Т изменения сигналов ДПР (фиг. 26), При фиксированном времени t ,это приводит-к уменьшению относительной длительности им- пульсов тока iS в цепях управления транзисторов, что в итоге приводит к снижению уровня среднего напряжения, .подводимого к секциям якорной
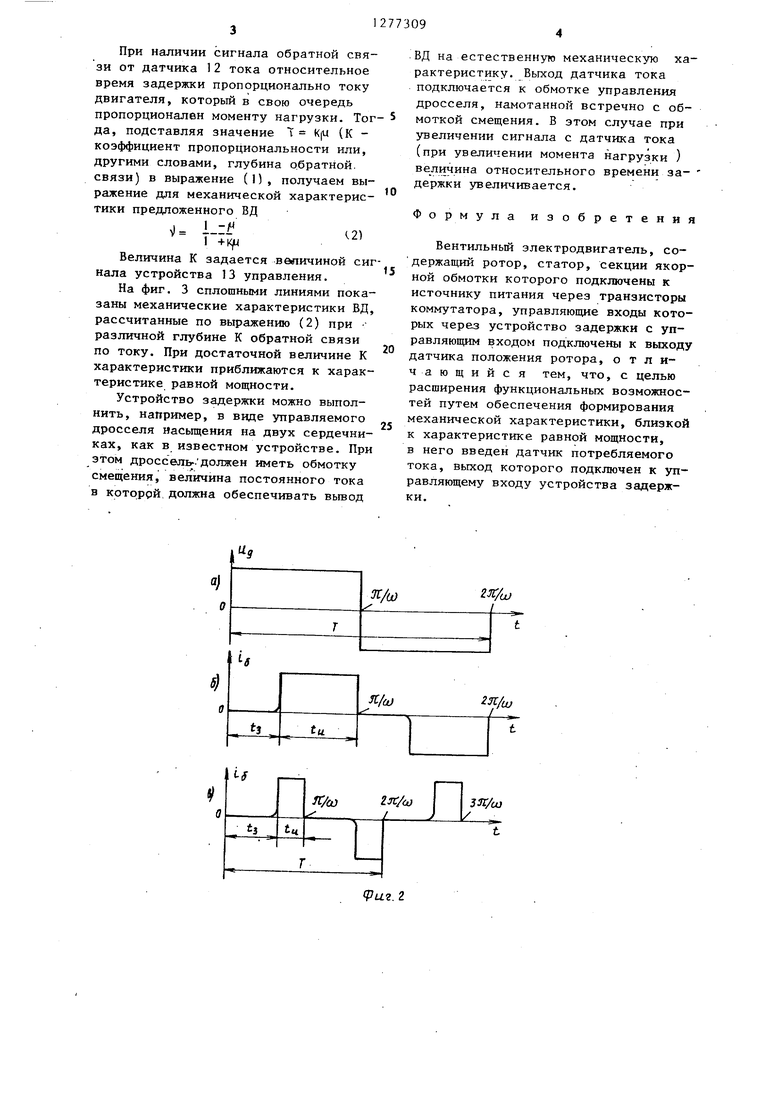
обмотки ВД. Для этого случая выражение для механической характеристики ВД в относительных единицах имеет вид
) 1 .. 1 +t
где v /ц)- относительная частота
вращения ротора ВД;
- относительное время за- держки;
о - частота вращения идеального холостого хода; относительное значение электромагнитного момента ВД; - электромагнитный момент
ВД;
Hf, - пусковой момент. На фиг. 3 пунктирными линиями по- казаны механические характеристики ВД при различных значениях времени задержки, Г ,, рассчитанные по выражению (1) .
V i-l , ....
При наличии сигнала обратной связи от датчика 12 тока относительное время задержки пропорционально току двигателя, которьш в свою очередь пропорционален моменту нагрузки. Тог да, подставляя значение Т К(Ц (К - коэффициент пропорциональности или, другими словами, глубина обратной, связи) в выражение (1), получаем выражение для механической характеристики предложенного БД
(2)
+
Величина К задается величиной сигнала устройства 13 управления.
На фиг. 3 сплошными линиями показаны механические характеристики БД, рассчитанные по выражению (2) при различной глубине К обратной связи по току. При достаточной величине К характеристики приближаются к характеристике равной мощности.
Устройство задержки можно выполнить, например, в виде управляемого дросселя насьпцения на двух сердечниках, как в известном устройстве. При этом дроссель-. должен иметь обмотку
....-,-. смещения, величина постоянного тока в кртрррй, должна обеспечивать вьгоод
.ВД на естественную механическую характеристику. Выход датчика тока подключается к обмотке управления дросселя, намотанной встречно с обмоткой смещения. В этом случае при увеличении сигнала с датчика тока (при увеличении момента нагрузки ) величина относительного времени за- держки увеличивается.
Формула изобретения
Вентильный электродвигатель, со- держащий ротор, статор, секции якорной обмотки которого подключены к источнику питания через транзисторы коммутатора, управляющие входы которых чере.3 устройство задержки с управляющим входом подключены к выходу датчика положения ротора, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения формирования механической характеристики, близкой к характеристике равной мощности, в него введен датчик потребляемого тока, выход которого подключен к управляющему входу устройства задержки.
иг.2
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1981 |
|
SU983925A2 |
| Вентильный электродвигатель | 1985 |
|
SU1259429A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Вентильный электродвигатель | 1987 |
|
SU1504747A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1264269A1 |
| Вентильный электродвигатель | 1974 |
|
SU674164A1 |
| Вентильный электродвигатель | 1984 |
|
SU1203654A1 |
| Вентильный электродвигатель | 1982 |
|
SU1023565A1 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1998 |
|
RU2152120C1 |
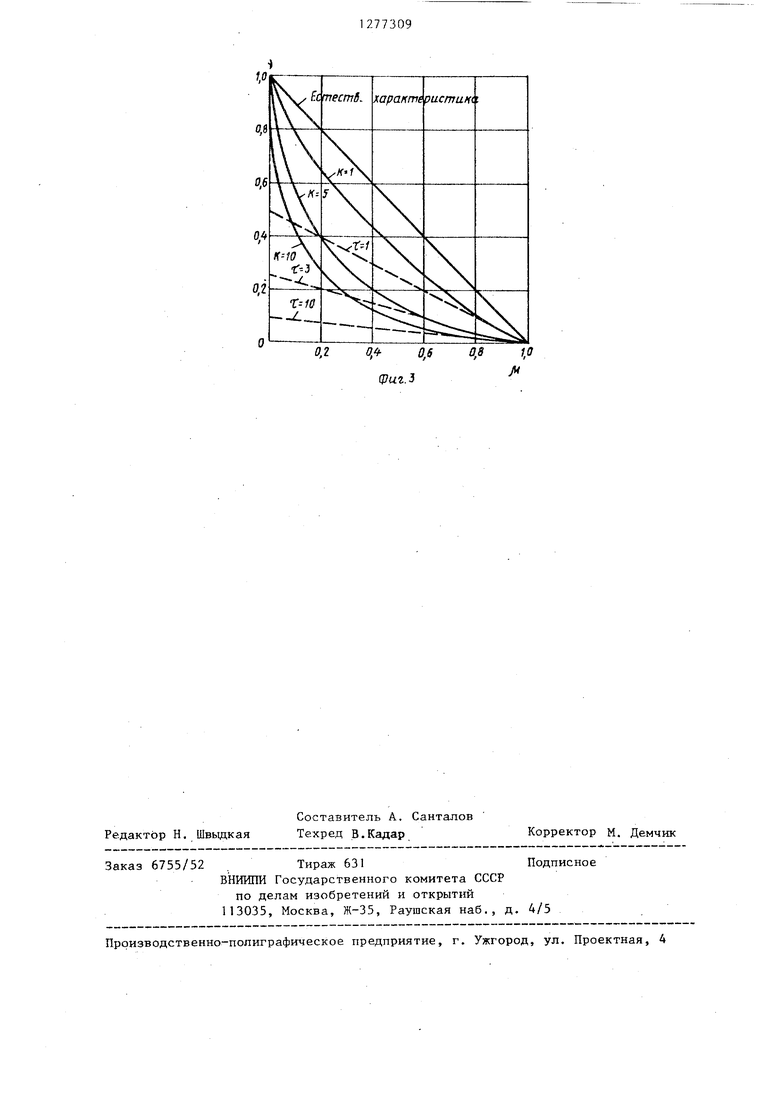
Изобретение относится к электротехнике, а именно к вентильнь1м электродвигателям (ВД-jf;, Целью изобретения является расширение функциональных возможностей путем обеспечения формирования механической характеристики, близкой к характеристике равной мощности. ВД содержит секции 1-4 якорной обмотки, подключенные к источнику питания 5 через транзисторы 6-9 коммутатора. Управляющие входы транзисторов 6-9 через устр-во 10 задержки подключены к выходу датчика 11 положения ротора. В цепь питания двигателя включен датчик 2 потребляемого тока, уравляю- щий вход к-рого подключен к выходу устр-ва управления 13, а выход - к. входу устр-ва 10 задержки. Устр-во задержки может быть вьтолнено в виде управляемого дросселя насыщения на двух сердечниках. Величина постоянного тока в обмотке смещения дросселя обеспечивает выход ВД на естест- венную механическую характеристику. Сигнал обратной связи обеспечивает время задержки сигнала на управляющие входы транзисторов, пропорциональное току двигателя, и в -резуль- тате приближение к характеристике равной мощности. 3 ил. i (Л IsD СО О (Риг.1
Редактор Н, Швьщкая
Составитель А. Санталов Техред В.Кадар
Заказ 6755/52 . Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5.
,.„, - - «-..---«-. - - --- - - - -- ..-.-.- - - - -- - в.-- - «- - --
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М, Демчик
| Овчинников И.Е., Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока | |||
| Л.: Наука, 1979, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Патент Великобритании № 1227025, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
