1 1
Изобретение относится к неразрушающему контролю и может быть исполь зёвано при измерении параметров агрессивных сред.
Цель изобретения - повышение точности и быстродействия измерений.
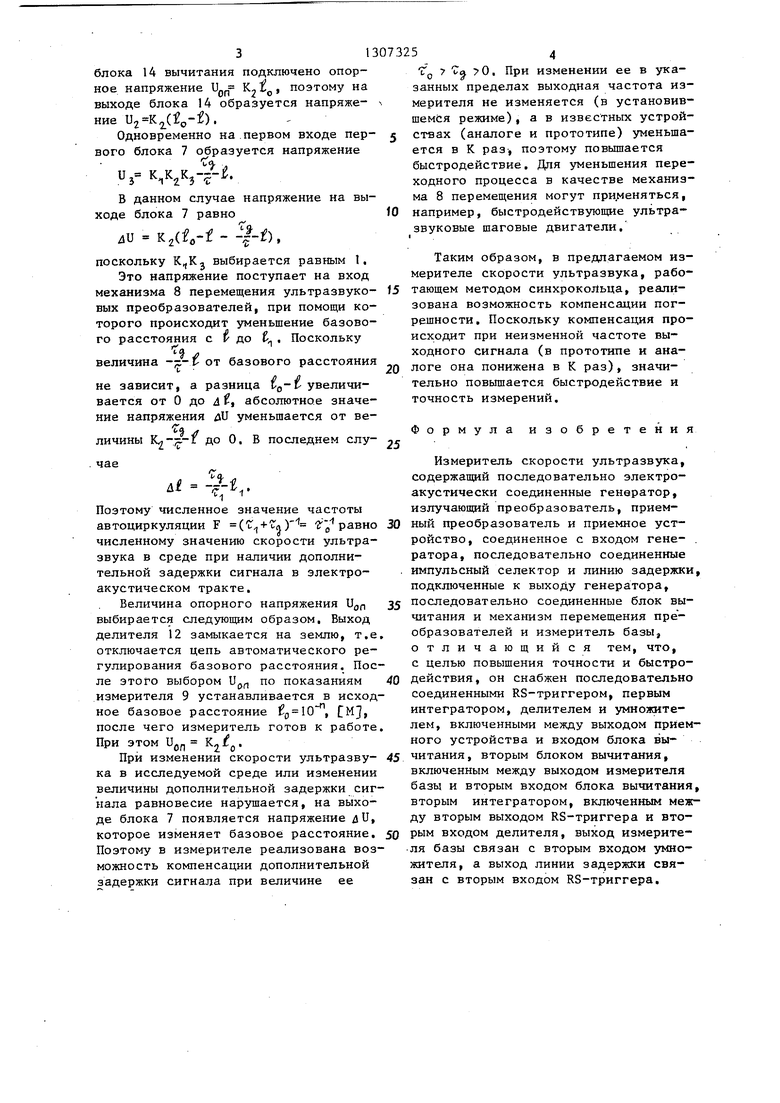
На фиг. 1 приведена принципиальная схема измерителя скорости ультразвука; на фиг. 2 - временные диаг раммы, поясняющие работу схемы.
Измеритель скорости ультразвука содержит последовательно электроакустически соединенные генератор 1, излучающий преобразователь 2, приемный преобразователь 3 и приемное уст ройство 4, соединенное с входом генератора I, последовательно соединенные импульсный селектор 5 и линию 6 задержки, подключенные к выходу генератора 1, последовательно соединенные блок 7 вычитания и механизм 8 перемещения преобразователей и измеритель 9 базы, последовательно соединенные RS-триггер 10, первый интегратор 11, делитель 12 и умножитель 13, включенные между выходом приемного устройства 4 и входом блока 7 вычитания, второй блок 14 вычитания, включенный между выходом измерителя 9 базы и вторым входом блока 7 вычитания, второй интегратор 15, включенный между вторым выходом RS-триггера 10 и вторым входом делителя 12. Выход измерителя 9 базы связан с вторым входом умножителя 13, а выход линии 6 задержки связан с вторым входом RS-триггера 10,
Измеритель скорости ультразвука работает следующим образом.
В начальный момент времени t (фиг , 2а) генератор 1 возбуждает преобразователь 2 и запускает селектор 5. При этом ге нератор 1 запускается в автоколебательном режиме- Ультразвуковой импульс, распространяясь по акустическому волноводу преобразователя 2, задерживается на время tj , проходит исследуемую среду, распространяется по акустическому волноводу преобразователя 3, задерживается на время Сд, и принимается преобразователем 3, в котором преобразуется в электрический импульс и поступает на вход приемного устройства 4 (фиг. 26). В приемном устройстве 4 формируется сигнал (Фиг. 2в) с нормированной амплитудой и длительностью, задержанный относительно времени излучения на время
307325
Ti 0 Времена задержки сигнала в исследуемой и в электрических цепях измерителя соответственно. Обычно
5 8i 61 6Сформированный сигнал с выхода
приемного устройства 4 переводит генератор 1 в режим синхрокольца с периодом повторения т , триггер 10 в О единичное состояние по прямому и в нулевое - по инверсному выходу.
Некоторая часть энергии ультразвукового сигнала отражается от границы волновод - исследуемая среда
15
из-за различия их акустических импедансов (фиг. 2г), выделяется селектором 5 и поступает на вход линии 6 регулируемой задержки. Время задержки линии 6 выбирается равным ta д .
Таким образом, на выходе линии 6 задержки образуется сигнал (фиг, 2д), сдвинутый на временной интервал Сл 2 cg , поэтому на прямом выходе триггера 10 образуется импульс
(фиг. 2е) длительностью Т.
Этот импульс подается на вход интегратора 11, на выходе которого образуется напряжение 11. КлСа , где Ко- постоянная интегрирования.
Вначале рассмотрим работу измерителя во время переходного процесса, т.е. при базовом расстоянии tg 7 t У t, В данном случае на инверсном выходе триггера 10 образуется и мпульс (фиг. 2ж), длительность которого равна TO л , а на выходе интегратора I1 напряжение , Поэтому на выходе делителя 12 образуется напряжение
и К
и, к, j ,
где К - коэффициент передачи делителя 12. При выборе Кл Kj,;
и,.
Это напряжение сохраняется до следующего цикла зондирования и поступает на первый вход умножителя 13, Напряжение на выходе делителя 12 зависит от базового расстояния, поэтому умножитель 13 предназначен для поддержания постоянного значения fq,/f при изменении f. Напряжение на выходе измерителя 9 при изменении равно Ug Kji, где К - коэффициент пропорциональности с размерностью (/MJ. Это напряжение поступает на первый вход первого блока 14 и на второй вход умножителя 13. На второй вход
313073254
блока 14 вычитания подключено опор- Т Т 0. При изменении ее в ука- ное напряжение Up поэтому на занных пределах выходная частота из- выходе блока 14 образуется напряже- . мерителя не изменяется (в установив- ние Uj K Cfp-f). шемСя режиме), а в известных устройОдновременно на .первом входе пер- j ствах (аналоге и прототипе) уменьша- вого блока 7 образуется напряжение ется в К раз-, поэтому повышается
быстродействие. Для уменьшения переходного процесса в качестве механиз- В данном случае напряжение на вы- ма 8 перемещения могут применяться, ходе блока 7 равно10 например, быстродействующие ультраС
Uj ,.
4U
/) I
поскольку выбирается равным 1. Таким образом, в предлагаемом изЭто напряжение поступает на входмерителе скорости ультразвука, рабомеханизма 8 перемещения ультразвуко- 15тающем методом синхрокоЛьца, реаливых преобразователей, при помощи ко-зована возможность компенсации погторого происходит уменьшение базово-решности. Поскольку компенсация прого расстояния с до t , Посколькуисходит при неизменной частоте лходного сигнала (в прототипе и анавеличина от базового расстояния
не зависит, а разница o- yвeличl вается от О до 4 , абсолютное значение напряжения U уменьшается от ве20 логе она понижена в К раз), значительно повышается быстродействие и точность измерений.
%
а Jf
ЛИЧИНЫ ДО О, В последнем слу- 25
Формула изобретения
чае
Измеритель скорости ультразвука, содержащий последовательно электроакустически соединенные генератор, излучающий преобразователь, приемзвука в среде при наличии дополнительной задержки сигнала в электроакустическом тракте.
. - -i-t,.
Поэтому численное значение частоты
автоциркуляции F ( t + fn ) равно 30ный преобразователь и приемное устчисленному значению скорости ультра-ройство, соединенное с входом гене- .
ратора, последовательно соединенные . импульсный селектор и линию задержки,
подключенные к выходу генератора.
Величина опорного напряжения 35последовательно соединенные блок вывыбирается следующим образом. Выходчитания и механизм перемещения пределителя 12 замыкается на землю, т,е,образователей и измеритель базы,
отключается цепь автоматического ре-отличающийся тем, что,
гулирования базового расстояния. Пос- целью повышения точности и быстроле этого выбором , по показаниям 40действия, он снабжен последовательно
измерителя 9 устанавливается в исход-соединенными RS-триггером, первым
ное базовое расстояние (, 10, М,интегратором, делителем и умножитепосле чего измеритель готов к работе,лем, включенными между выходом прйемПри этом U.J.. К / ,ного устройства и входом блока выПри изменении скорости ультразву- 45читания, вторым блоком вычитания,
ка в исследуемой среде или изменениивключенным между выходом измерителя
величины дополнительной задержки сиг-базы и вторым входом блока вычитания,
нала равновесие нарушается, на выхо-вторым интегратором, включенным межде блока 7 появляется напряжение /jU,ду вторым выходом RS-триггера и втокоторое изменяет базовое расстояние, 50Р входом делителя, выход измеритеПоэтому в измерителе реализована воз-ля базы связан с вторым входом умноможность компенсации дополнительнойжителя, а выход линии задержки связадержки сигнала при величине еезан с вторым входом RS-триггера,
звуковые шаговые двигатели.
20 логе она понижена в К раз), значительно повышается быстродействие и точность измерений.
Формула изобретения
Измеритель скорости ультразвука, содержащий последовательно электроакустически соединенные генератор, излучающий преобразователь, прием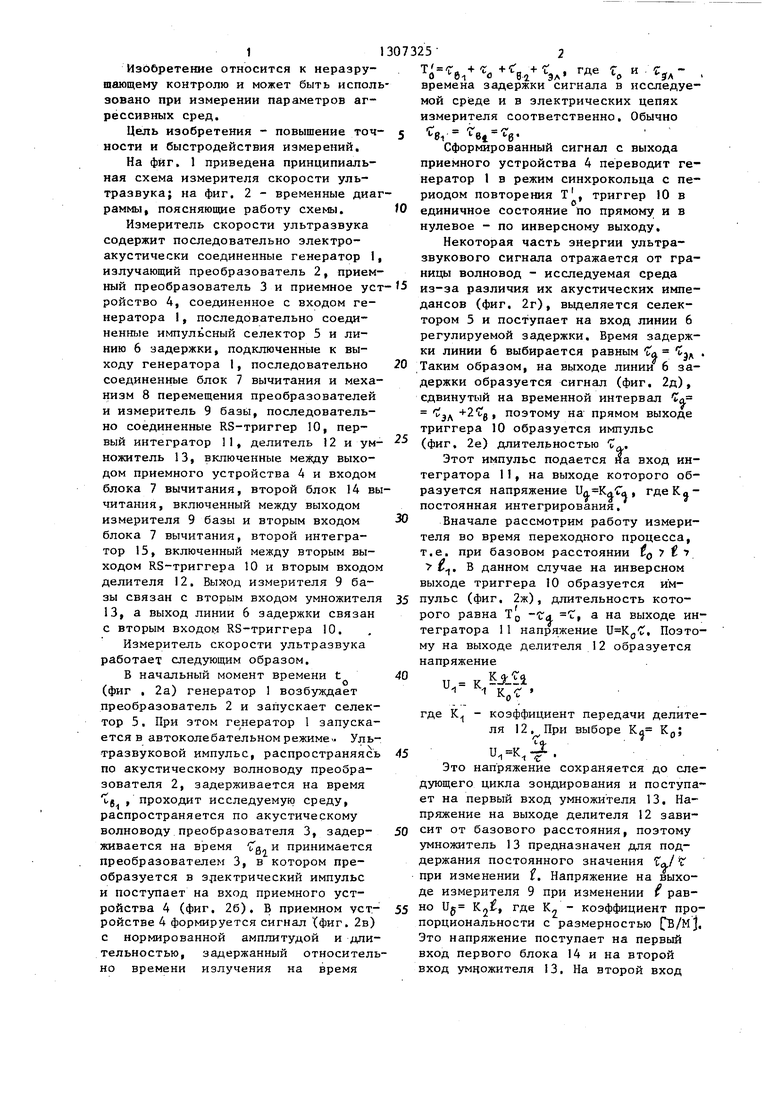
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель скорости ультразвука | 1986 |
|
SU1317355A2 |
| Ультразвуковой уровнемер | 1982 |
|
SU1064147A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА ПОВЫШЕННОЙ ТОЧНОСТИ | 1998 |
|
RU2152596C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ПРОДУКТА, ПРОШЕДШЕГО ПО ТРУБОПРОВОДУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2085858C1 |
| Гидрологический измеритель скорости звука | 1985 |
|
SU1255871A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА | 1998 |
|
RU2152597C1 |
| Устройство для измерения скорости звука | 1990 |
|
SU1728672A1 |
| Измеритель скорости звука | 1990 |
|
SU1758444A1 |
| Гидрологический измеритель скорости звука | 1986 |
|
SU1465715A2 |
| Измеритель скорости ультразвука в жидкости | 1980 |
|
SU954873A1 |
Изобретение относится к области неразрушающего контроля и может быть| использовано при измерении параметров агрессивных сред. Целью изобретения является повышение точности и быстродействия измерений за счет компенсации дрейфа параметров схемы. Изменение в схеме позволяет при помощи механизма перемещения преобразователей корректировать базу измерений для коррекции изменения времени прохождения сигнала в электронных цепях и преобразователях. 2 ил. (Л С
| Измеритель скорости ультразвука | 1979 |
|
SU815615A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измеритель скорости ультразвука | 1982 |
|
SU1035505A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
