1
Изобретение относится к автоматическому пра1,теии1() дви/кеиием самоходных ма- И1НН и может быть исноль:и)вано для учета н контроля работы самоходи1 1х транспортных ман1ин.
1 Le.ii) нзобрс I сння iiOBbiHieiHie точности.
11а черте/ке ноказана функннона. И.ная схема cTpoiicTiia.
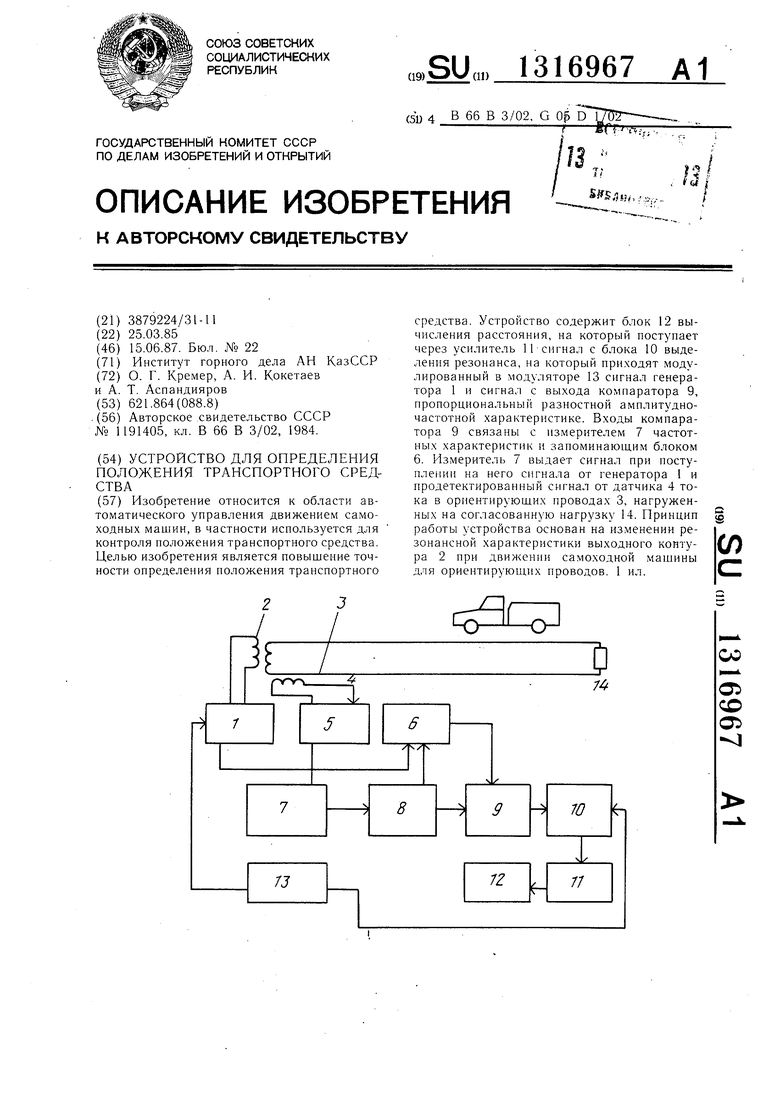
Устройство содержи г | еиератор 1 высо- кочас ютных .1П11 |, на1Ч)ужен11ЫЙ на выходной кош ур 2, KOTOpbH i нндукти1 но связан с jiHiHieii о)нентиру они1х токомесч- HUIX проводов , датчик 4 тока, индуктивно связан1И)1и с .линией ориентирующих нро1Ю- дов, детектор 5, заиомииаюиии блок 6. измеритель 7 частотных xaiiaKTCiMic iTiK е коммутатором 8, днф(|)ереици; льиы11 уси„1нте:1ь 9, блок 10 выделения резонанса, усили- те;|ь 11, блок 12 вычисления расстоя1И1Я, модулятор 13, со1-ласованиую нагрузку (сон- ротнвление) 14.
Устройство рабо 1 ает следующим образом.
Генератор 1 выдает выс(.кочаетотн151е сиг- нал1з1, моду.тированные низкой частогой но закону, определяемому моду.тятором 13, которые подаются с иомотью В1 1ходиого. контура 2 в линию opueHTiipyioHUix проводов 3, нагруженную на согласованную iiai py3- ку 14.
Для заме)а напряжения и.тн гока в линии нредпазначен датчик 4, снгиа; с которог о детектируется к детекторе 5 н подается на вход измерителя 7 част(зти1)1х характе|)нс- тик, на второй вход которого нодаетея значение чаетоты, еоответствуюн1ей данной ам- п.питуде, т.е. no. iyuaio i амп;1итудпо-частот- ну ю X а р а кт( р и ст и к у.
Перед нача. юм работы самоходной 1Из1 на данной .тннип производят с иомопизю указанных б. юков снятие амплитудно-частотной характеристики (АЧХ) коммутатора 8 и записывают в заноминаюни|й блок 6. Затем переводят коммутатор 8 в другое положение, когда выход изме)ителя 7 отключен от входа блока 6 н соединен только с дифференциальным уеплителем 9.
При движении са.моходной маишны вдоль проводов 3 непрерывно снимают суммарную ., которая но.чучается в измерителе 7 по информации о генераторе I и детекторе 5 и носредсгвом коммутатора 8 нодаетея
на вход комиаратора 9, на второй вход кото- |Н)го е блсзка 6 подается снгпа,л, нрогюр- 1и1опал1) ., епя юй ранее д.ля .лннин без | раиенорт11О1ч) средства. В компараторе с 9 нронзводитея вычитание -mix АЧ.Х. Что- 6i)i libiMHTaiHie иропеходпло синхронно, т.е. нроизводилос) 1 ычнтап1 е амн.лнтч д двух указанных .ЛЧ.Х, соответетвуюни1х од.ним и тем же чаел ол ам, выдача заиомие П1ОЙ АЧХ е блока 6 иронзводнтся ио сигна.лу е гене|)а0 тора 1. В блоке И), ко1 орый вк.чючается в работу на нернод временн нзме 1ения частоты, ио иолучеиной разноетной характе- ристике оиределя.от pe,,i)iiancbi ( макс1-:мумы) и соответствующие им частоты. Эта информация через усил1гге.;1ь 11 иодаетея на блок
5 с 12, где но нзвесплюй формуле х .
определяетея местоно. юженне самоходной машины вдол1з гоконесунхих проводов. При этом бе11ется .любая пара е.ледуюни1х. друг . за другом резонанеов.
Формула u:it)UpereHiL4
Устр( для определения н. можепия транено.ртпого средства, переметаклдегося
5 вдоль ориентирующих TOKonecyuuix про- , содержа met, генератор В1 1еокочастот- ных колебаний е В1,1ходн1)1м ко1ггуром и дал - чнк тока е детектором на выходе, индуктивно связанные е орнленл ируюн пми про- юдами на одном конце, бдок вычисления
0 расстояния, связанный через уси,лите.ль е блоком выделения резонанса колебаний, и свя- .iannbui е одним входом иос.леднего и генера- л ором модулятор, отличающееся тем, что, с целью повьииеиня, точпостп, оно снабжено подключенным к выходу дел ектора и первому входу генератора высокочастотных ко.лебаний измерителем частотиых характеристик с коммутатором на его выходе, запоминающим б.локом, нодк.лючеиным пер- В1)1м входом к одному выходу носледпего, а (;рым - к дру| ому 1и 1ходу 1чм1ератора, н дифференцнальным усилнте.лем, один и дру гой входы KOTOpd o соединены е выхол.ами коммутатора и заиоминаюн1его б.лока соответственно, а выход - с другим входом блока выделения резонанса колебаний, при этом
5 лруг ие концы ориентируюншх нроводов нагружены на согласованную нагрузку.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| ЬМЙЛИОГЕКА I | 1971 |
|
SU314150A1 |
| Устройство для автоматического контроля амплитудно-частотных характеристик | 1987 |
|
SU1465824A2 |
| Измеритель амплитудно-частотной характеристики СВЧ тракта | 1981 |
|
SU1026083A1 |
| Устройство для определения собственных параметров резонирующих тел | 1985 |
|
SU1319823A1 |
| Устройство автоматического контроля амплитудно-частотных характеристик | 1981 |
|
SU953596A1 |
| Измеритель амплитудно-частотных характеристик пьезопреобразователей | 1980 |
|
SU894605A1 |
| Измеритель группового времени запаздывания | 1988 |
|
SU1555697A1 |
| Измеритель амплитудно- и фазочастотной характеристики СВЧ-тракта | 1990 |
|
SU1721546A1 |
| Устройство для автоматического измерения амплитудно-частотных характеристик | 1986 |
|
SU1379749A1 |
| Измеритель добротности колебательных систем | 1989 |
|
SU1718144A1 |
Изобретение относится к области автоматического управления движением самоходных машин, в частности используется для контроля положения транспортного средства. Целью изобретения является повышение точности определения положения транспортного средства. Устройство содержит блок 12 вычисления расстояния, на который поступает через усилитель 11 сигнал с блока 10 выделения резонанса, на который приходят модулированный в модуляторе 13 сигнал генератора 1 и сигнал с выхода компаратора 9, пропорциональный разностной амплитудно- частотной характеристике. Входы компаратора 9 связаны с измерителем 7 частотных характеристик и запоминаюшим блоком 6. Измеритель 7 выдает сигнал при поступлении на него сигнала от генератора 1 и продетектированный сигнал от датчика 4 тока в ориентирующих проводах 3, нагруженных на согласованную нагрузку 14. Принцип работы устройства основан на изменении резонансной характеристики выходного контура 2 при движении самоходной машины для ориентирующих проводов. 1 ил. (Л со ct со с:)