Известные способы балансировки колесных пар «а балансировочных машинах не обеспечивают надлежащего качества балансировки из-за смещения оси щейки относительно оси поверхности качения бандажей колесных пар..
Описываемый способ свободен от этого недостатка. Это достигает,ся тем, что колесную пару при балансировке опирают на ролики колеблющейся части балансировочной машины поверхностями качения бандажей.
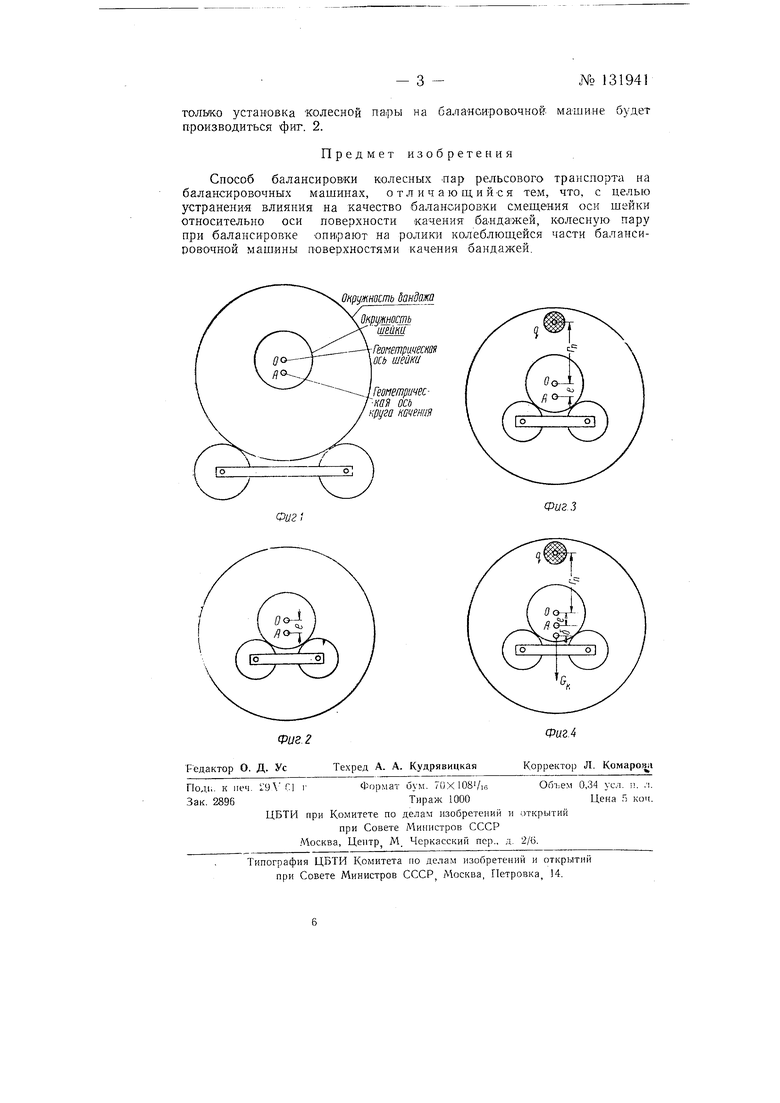
На фиг. 1, 2, 3 и 4 изображены схемы балансировки колесных пар, поясняющие описываемый способ.
Уравновешивание вагонных колес:} ых пар имеет особенность, от которой зависит конструкция балансировочной мащины. Эта особенность заключается в так называемой эксцентричности колесных пар, под которой понимают несовпадение геометрической оси щеек с осью, проходящей через геометрические центры кругов качения бандажей.
Если .не учесть эту особенность при проектировании балансировочной машины, то уравновешенность колесной пары будет не у.меньшаться, а, наоборот, увеличиваться после балансировочного процесса на машине.
При плоскопараллельном движении колесной пары картина распределения ускорений в колесе получается точно такой же, как в случае вращения колеса вокруг неподвижной оси, проходящей через геометрические центры кругов качения бандажей. Отсюда следует, что колесная пара должна опираться на ролики балансировочной машины коническими поверхностями бандажей, как показано на фиг. 1. Это требование обычно не учитыв ается, по-видимому по аналогии с обычными балансировочныМИ машинами, предназначенньгаи для уравно№ 131941 - 2 вешивания различных роторов, и вследствие этого допускается установка колесной пары на роликовые опоры поверхностями шеек.
Ниже приводится доказательство того, что установка колесной пары на балансировочной машине по фиг. .2 не может обеспечить уничтожения дисбаланса. Если допустить, что конические поверхности бандажей- имеют биение 2е по отношению к цилиндрическим поверхностям шеек, то во время балансировки, лри враш,ении колесной пары вокруг оси О (|фиг. 2), балансировочная машина окажется под действием дисбаланса D, определяемого по формуле:
Д. 0,.е,
где Of;-вес левого и правого колес колесной пары, а е - эксцентрицитет осей. Вследствие этого оператор, при правильном ведении балансировки, установит в плоскости каждого колеса противовес, вес
которого определяется выражением: (схема 3).
Однако после такой балансировки неуравновешенность колесной пары окажется больше, чем до балансировки. Действительно, до установки п-ротивовесов дисбаланс колесной пары, при качении ее по рельсам, был равен: .e,
где GO - вес оси колесной пары, а погле динамической балансировки будет равен: D„ {G + q) . е,
где q - вес противовесов, а G - вес колесной лары.
Если принять вес G колесной пары равным 1232 кг, вес оси GO колесной пары 402 кг, а вес q противовеса, равным 1 кг, то неуравновешенность колесной лары после такой балансировки увеличится приблизительно в. три раза, что видно из следуюшего расчета:
Doem G+g 1232 +
D а402
Может быть приведен еще один пример. Сделаем «редположе,ние, что колесная пара является уравновешенной, но в то же время имеет эксцентричность, равную 2е (фиг. 4). Если эту колесную пару поставить на балансировочную машину по фиг. 2, то измеритель дисбаланса покажет следующий, дисбаланс
D С,„ (е + б),
где б-расстояние от центра тяжести центра колесной лары до мгновенного центра А ускорений, а G, - вес двух колес. Дисбаланс- Z)можно устранить во время балансировки путем прикрепления к каждому колесу противовеса
Я -- GK
на .расстоянии г„ от центра О, но тем не менее уравновешенность колесной пары после балансировки будет нарушена, так как при качении ее по рельсам возникнет дисбаланс, равный
Docm (G + q.e.
Рассмотренных примеров достаточно, чтобы сделать вывод о том ,что наличие в колесной паре эксцентричности 2е не позволяет уменьшать дисбаланса колесных пар ннже величины (G + q)e, и может ухудшить ее уравновешенность после динам.ической балансировки, если
;3.
(е -t б)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки роторов | 1951 |
|
SU93814A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1967 |
|
SU198752A1 |
| КОЛЕСО ЛЕГКОВОГО АВТОМОБИЛЯ | 2007 |
|
RU2346827C1 |
| Устройство для динамической балансировки роторов | 1955 |
|
SU103950A1 |
| ЛОПАСТНОЕ КОЛЕСО ВЕНТИЛЯТОРА | 2014 |
|
RU2544898C1 |
| Двухплоскостной балансировочный станок | 1952 |
|
SU95986A1 |
| Способ статической балансировки кривошипно-шатунной группы | 2016 |
|
RU2652694C2 |
| ЦЕНТРИФУГА ДЛЯ ОТЖИМА БЕЛЬЯ | 2009 |
|
RU2409717C1 |
| Способ балансировки зубчатого механизма | 1975 |
|
SU578573A1 |
| ТУРБОМОЛЕКУЛЯРНЫЙ ВАКУУМНЫЙ НАСОС | 1971 |
|
SU312965A1 |
