Изобретение относится к сельскому хозяйству и может быть использовано при по- ляве ссльскохозяйственн1,1х культур много- опорными дождевальными ма1иинами с забором воды из оросительных каналов.
Целью изобретения является повышение укономичноети и качества управления водо- подачей па загрязненных каналах с боль- 1ИИМИ уклонами.
На фиг. 1 представлена схема участка оросительного кама.ча с устройством управления водоподачей и дождевальной машиной; на фиг. 2 - разрез капала перед под- норной перемычкой дождевальной ма11.1ины (ДМ) с установленными на пей сигнализаторами уровня, датчиками пройденного пути и скорости движения ДМ; на фиг. .3 -
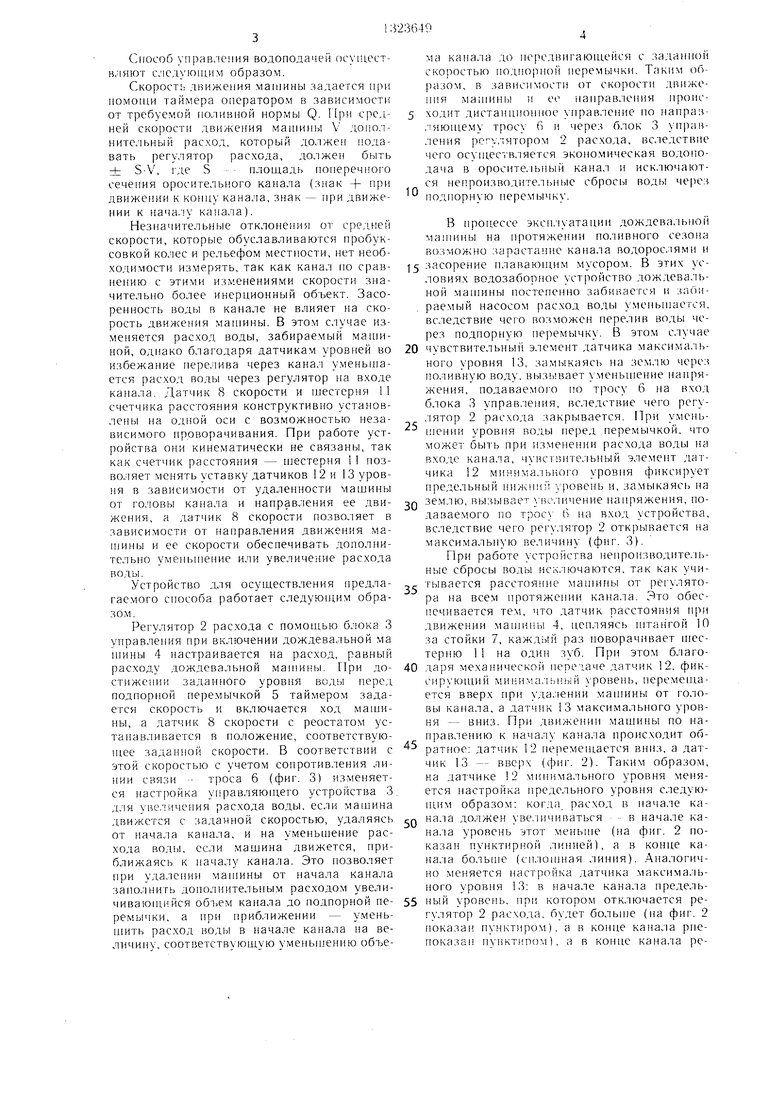
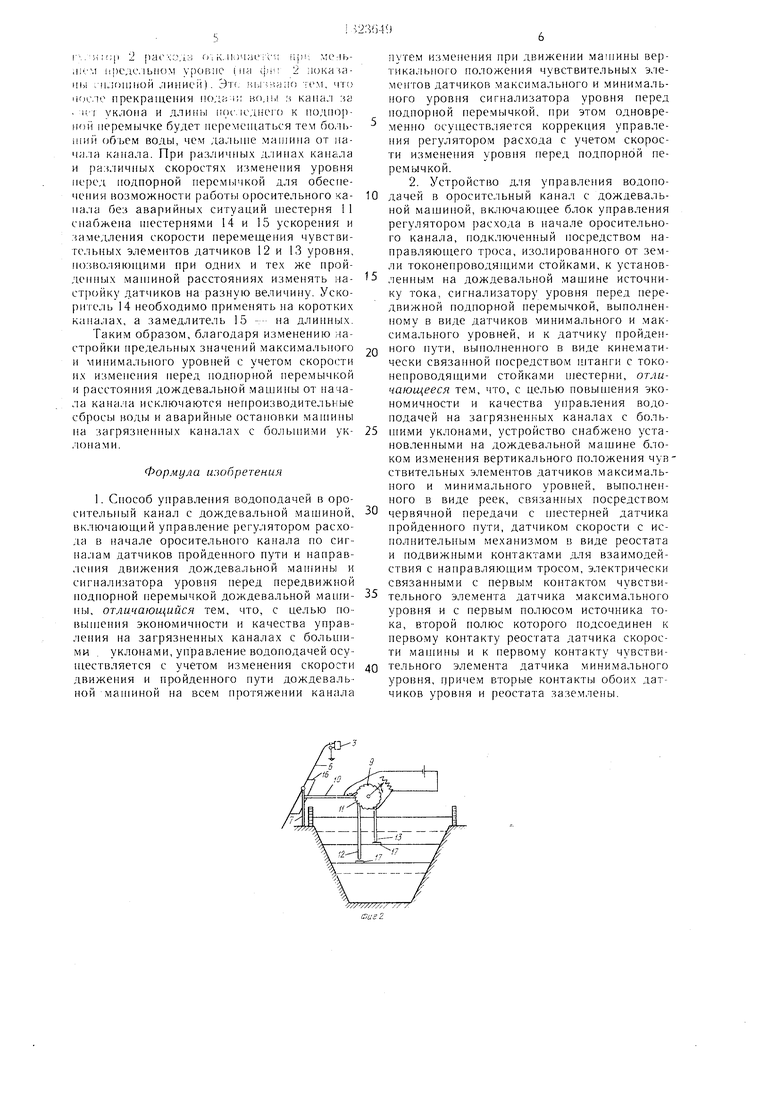
электрическая схема устройства; на фиг. 4
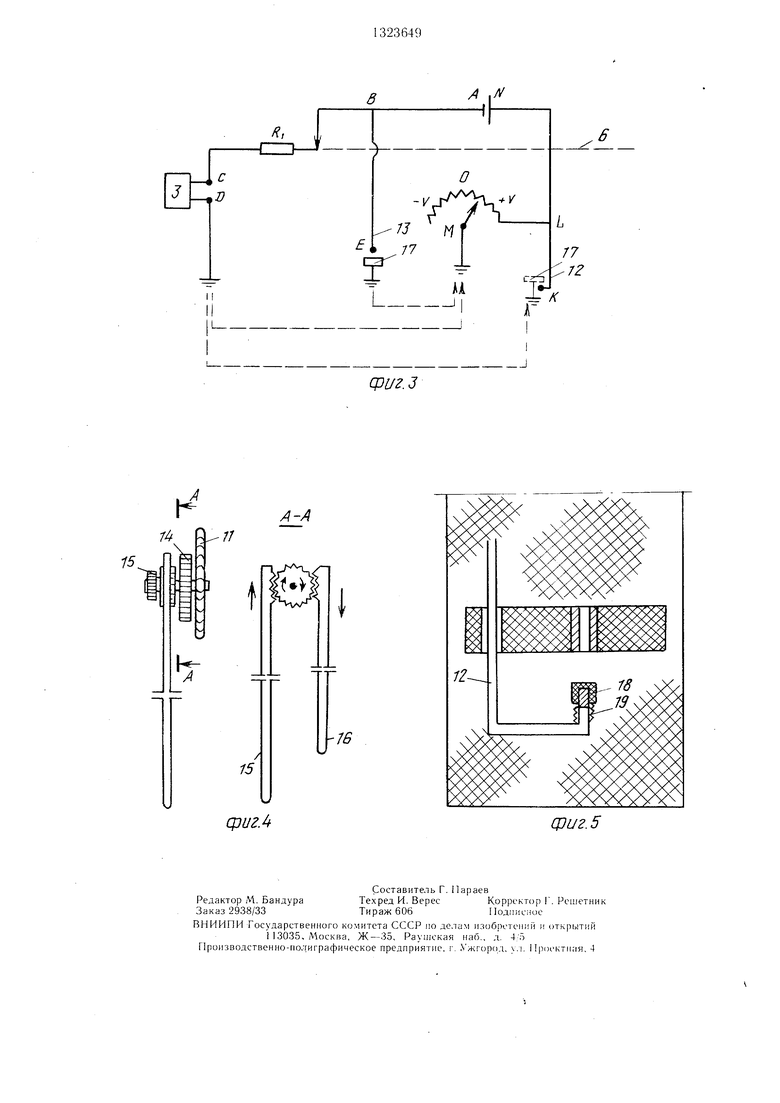
кинематическая связь элементов блока изменения вертикального положения чувствительных элементов датчиков уровня; па {|)иг. 5 - конструкция чувствительного элемента датчика минимального уровня.
Регулирование водоподачи осуп.1ествляет- ся с учетом скорости и направления движения дождевальной машины, ее расстояния от головы канала и скорости изменения у)овней воды перед подпорной перемычкой. Учет скорости и направления движения дож- девальпой маншны позволяет при удалении последней от головы канала увеличить расход регулятора расхода на величину, необходимую для заполнения увеличивающейся длины и объема участка канала между его началом и ноднорной перемычкой. При изменении направления движения машины, т.е. при ее приближении к голове канала, происходит уменьн1епие длины и объе.ма участка Kanajia между его началом и подпорной пе|)емычкой, поэтому для баланса- воды, поступающей и кана. и забираемой .машиной, необходимо уменьшение расхода воды через ре1Л лятор расхода в голове канала. При этом челч больн1е скорость движения дождеЕ.аль- ной MaijiHHbi, тем больп1е необходимо изменять расход регулятора расхода.
Учет расстояния, на котором находится дождевальная ма1ни11а, от головы канала и скорости изменения уровней воды перед неремычкой позволяет исключить, особенно н)и максимальном удалении ма1нины от головы капала, заназдывание прихода дополнительного расхода воды при падении уров- iiH воды перед неремычкой, а при нарастании уровня воды перед пере.мычкой - запаздывание прикрытия регулятора расхода в го- ;1ове капала. Это особенно заметно на тех системах, где уклоны каналов в пределах 0,001-0,0, возможно засорение водозаборного устройства машины, вследствие чего происходит быстрое изменение уровня зоды перед подпорной перемычкой ма1нипы, когда нарун)ается баланс воды, нодаваемой через регуляторы расхода и забираемый дожде- па. 1ьн()й .
Устройство для осуществления способа управления водоподачей в оросительный канал 1 включает установленный в начале капала 1 регулятор 2 расхода с блоком 3
5 управления. Вдоль канала вперед и назад может перемещаться дождевальная машина 4 с водозаборным устройством и передвижной подпорной перемычкой 5. Для поддержания прямолинейности движения машины вдоль канала служит направляющий
трос 6, установленный на поддерживающих стойках 7, расположенных друг от друга на одинаковом раестоянии. На дождевальной машине 4 установлен датчик 8 скорости (указатель екорости с таймером) с
5 реостатом на выходе и датчик 9 пройденного пути, снабженный н тангой 10, кинематически связанной со стойками 7 крепления троса 6 и поворачивающей при каждом взаимодействии с ними шестерню 1 на один зуб. Шестерня 11 через механичес0 кую передачу связана с датчиками 12 и 13 минимального уровня и максимального уровня воды соответственно 13. Это позволяет изменять настройку датчиков на заданный уровень воды перед подпорной неремычкой.
5
Шестерня 11 датчика нройденного пути
связана с блоком изменения вертикального положения чувствительных элементов датчиков макеимального и минимального уровней, выполпенных в виде зубчатых реек,
Q входящих в зацепление с разных сторон с шестерней, посаженной на один вал с шестерней 11 датчика пройденного пути (фиг. 4). С целью изменения величины вертикальных перемещепий в зав иси.мости от пройденного пути для каналов различной
с ДЛИНЫ устройство снабжено ускорителем 14 и замедлителем 15 скорости вертйкал)ного неремещения чувствительных элементов датчиков 12 и 13 уровня.
Дистанционная связь реостата датчика 0 скорости и датчиков максимального и минимального уровней с блоком 3 управления осуществляется по направляющему тросу 6, который изолирован от стоек 7 полиэтиле- трубками и через два и более контакта 16, скользящих по тросу 6, соединен 5 с блоком 3 управления регулятора 2 расхода (фиг. 3). Чувствительные элементы обоих датчиков уровня выполнены в виде поплавков 17, которые через поливпую воду имеют надежный контакт с землей, и установленных в защитном кожухе 18 с возвратной нружиной 19 контактов, ггодключен- ных к полюеа.м: источника тока (на фиг. 5 приведена схема датчика минимального уровня). Исключение засорения поплавка обеспечивается помещением последнего в сетча- с тый контейнер, который может быть выполнен общим для обоих датчиков уровней и д,ля входа всасывающей линии дождевальной маншны.
0
Способ управления водоподачей осущест н.пяют следующим образом.
Скорость движения машины задается нри помонш таймера оператором в зависимости от требуемой поливной нормы Q. При средней скорости движения машины V дополнительный расход, который должен подавать регулятор расхода, должен быть ± S V, где Sнлощадь поперечного
сечения оросительного канала (знак 4- при движении к концу канала, знак - при движении к началу канала).
Незначительные отклонения от средней скорости, которые обуславливаются пробуксовкой колес и рельефом местпости, нет необходимости измерять, так как канал но сравнению с этими изменениями скорости значительно более инерционный объект. Засоренность воды в канале не влияет на скорость движения машины. В этом случае изменяется расход воды, забираемый машиной, однако благодаря датчикам уровней во избежание перелива через канал уменьшается расход воды через регулятор на входе канала. Датчик 8 скорости и шестерня И счетчика расстояния конструктивно установлены на одной оси с возможностью независимого проворачивания. При работе устройства они кинематически не связаны, так как счетчик расстояния - шестерня 1 позволяет менять уставку датчиков 2 и 13 уровня в зависимости от удаленности машины от головы канала и направления ее движения, а датчик 8 скорости позволяет в зависимости от направления движения машины и ее скорости обеспечивать дополнительно уменьшение или увеличение расхода воды.
Устройство для осуществления предлагаемого способа работает следуюншм образом.
Регулятор 2 расхода с помощью блока 3 управлепия при включении дождевальной ма шины 4 настраивается на расход, равный расходу дождевальной машины. При достижении задаппого уровня воды перед подпорной перемычкой 5 таймером задается скорость и включается ход машины, а датчик 8 скорости с реостатом устанавливается в положение, соответствующее заданпой скорости. В соответствии с этой скоростью с учетом сопротивления линии связи - троса 6 (фиг. 3) изменяется настройка управляющего устройства 3. Д.1Я увеличения расхода воды, если движется с заданной скоростью, удаляясь от начала канала, и на уменьшение расхода воды, если машина движется, приближаясь к началу канала. Это позволяет при удале1ши машины от начала канала заполнить дополнительным расходом увеличивающийся объем канала до подпорной перемычки, а при приближении - уменьшить расход воды в начале канала на величину, соответствующую уменьшению канала до передвигающейся с заданной скоростью подпорной перемычки. Таким образом, в зависи остп от скорости движе- 1ШЯ MaiiuiHiii II ее направления проис- ходит дистанционное управление по направ- , 1яющему тросу 6 и через блок 3 управления регулятором 2 расхода, вследствие чего осуществляется экономическая водопо- дача в оросите,1ьный канал и иск,пючают- ся непроизводительные сбросы воды через
подпорную перемычку.
5
В процессе эксплуатации дождева,1ьпой машипы на протяжении поливного сезона возможно зарастание канала водорос, 1ями и 5 асорение плавающим мусором. В этих условиях водозаборное устройство дождевальной машины постепенно забивается и забираемый насосом расход воды уменыпается, вследствие чего возможен перелив воды через подпорную перемычку. В этом случае
0 чл вствительный элемент датчика максима,ib- ного уровня 13, замыкаясь на землю через поливную воду, вызывает умепыпение нанря- жения, подаваемого по тросу 6 на вход блока 3 управ,чения, вследствие чего регулятор 2 расхода закрывается. При уменьшении уровня воды перед перемычкой, что может быть при изменении расхода воды на входе кана,, чувсг ;итель 1ый элемент датчика 12 минимального уровня фиксирует предельный ппжнп; , ровень и, замыкаясь на
Q землю, вызывает ве,1пчение напряжения, подаваемого по 6 на вход устройства, вследствие чего pei-улятор 2 открывается на максимальную ве,1ичину (фиг. 3).
При работе устройства )епроизводите,1ь- ные сбросы воды исл,пючаются, так как учис тывается расстояние машины от регулятора па всем протяжепии кана,та. Это обеспечивается тем, что датчик расстояпия при движении 4, цепляясь штан гой 10 за стойки 7, каждый раз поворачивает шестерню 1 1 на один зуб. При этом благо0 даря механической 1ере 1аче датчик 12. фиксирующий минима, ьпь1Й уровень, перемещается вверх при уда.:1ении машины от головы канала, а датчик 13 максимального уровня - вниз. При движении машины по направлению к началу кана,та происходит об5
ратное: датчик 12 перемещается вниз, а датчик 13 -- вверх (фиг. 2). Таким образом, на датчике 12 мпп11ма,чьпог о уровня меняется настройка предельного уровня следующим образом: когда расход в начале каQ нала должен ве,1ичиваться в начале канала уровень этот меньн1е (на фиг. 2 показан пунктирной линией), а в конце канала бо, 1ыпе (сплошная линия). .Аналогично меняется настрой а максимального уровня 13: в начале канала нредель5 ный уровень, при котором отключается регулятор 2 расхода, будет больше (на фиг. 2 показан пунктиром), а в конце кана.па рне- показан пунктиром), а в конце кана,ча реГ .. 2 )a(;;.i.:;i () : К. ii) ili/i: MCilb- .iii M предо,ibiioN ViXiBHC nia ijir: 2 ;к;ка(а- ubi :-ii,;K)iiiii()H jinHHcii). Эи, , чт ii(.u:/ie прекращения под; и; во.ил .ч капа;: :ta ii i ук;1она и длины пос.юдьчмч) к подпор- перемычке будет перемещаться тем 6o, uiHii объем воды, чем дальше машипа от па- чала канала. При различных длинах канала и ра: личных скоростях изменения уровня не)ед подпорной перемычкой для обеспечения возможности работы оросительного ка- Ha:ia без аварийных ситуаций шестерня 1 1 снабжена Н1естернями 14 и 15 ускорения и замедления скорости перемещения чувствительных элементов датчиков 12 и 13 уровня, назво;1ЯЮ1Цими при одних и тех же пройденных расстояниях изменять настройку датчиков на разную величину. Ускоритель 14 необходимо применять на коротких каналах, а замедлитель 15 -- на длинных. Таким образом, благодаря изменению настройки предельных значений максимального и минимального уровней с учетом скорости их изменения неред подпорной перемычкой и расстояния дождевальной машины от начала Kana.ia исключаются непроизводительные сбросы воды и аварийные остановки мап1ины на загрязненных канала.х с большими уклонами.
Формула изобретения
1. Способ управления водоподачей в оросительный канал с дождевальной машиной, включающий управление регулятором расхода в начале оросительного канала по сигналам датчиков пройденного пути и направ- . 1ения движения дождевальной мащ ины и сигнализатора уровня перед передвижной подпорной перемычкой дождевальной машины, отличающийся тем, что, с целью но- вышения экономичности и качества управления на загрязненных каналах с больц и- ми . уклонами,управлениеводонодачей осуществляется с учетом изменения скорости движения и пройденного пути дождевальной ма1ниной на всем протяжении канала
0
5
0
5
0
5
0
путем изменения при движении машины вертикального ноложения чувствительных элементов датчиков максимального и минимального уровня сигнализатора уровня перед подпорной перемычкой, при этом одновременно осуществляется коррекция управления регулятором расхода с учетом скорости изменения уровня перед подпорной перемычкой.
2. Устройство для управления водоподачей в оросительный канал с дождевальной машиной, включаюн1ее блок управления регулятором расхода в начале оросительного канала, подключенный посредством направляющего троса, изолированного от земли токонепроводяплими стойками, к установленным на дождевальной машине источнику тока, сигнализатору уровня перед передвижной подпорной перемычкой, выполненному в виде датчиков минимального и максимального уровней, и к датчику пройденного пути, выполненного в виде кинематически связанной посредством штанги с токо- ненроводянхими стойками шестерни, отличающееся тем, что, с целью повын1ения экономичности и качества управления водоподачей на загрязненных каналах с большими уклона.ми, устройство снабжено установленными на дождевальной машине блоком изменения вертикального положения чувствительных элементов датчиков максимального и минима;1ьного уровней, выполненного в виде реек, связанных посредством червячной передачи с шестерней датчика пройденного пути, датчиком скорости с исполнительным механизмом в виде реостата и подвижными контактами для взаимодействия с нанравляющим тросом, электрически связанными с первым контактом чувствительного элемента датчика максимального уровня и с первым полюсом источника тока, второй полюс которого подсоединен к первому контакту реостата датчика скорости .машины и к первому контакту чувствительного элемента датчика мини.мального уровня, причем вторые контакты обоих датчиков уровня и реостата зазе.млены.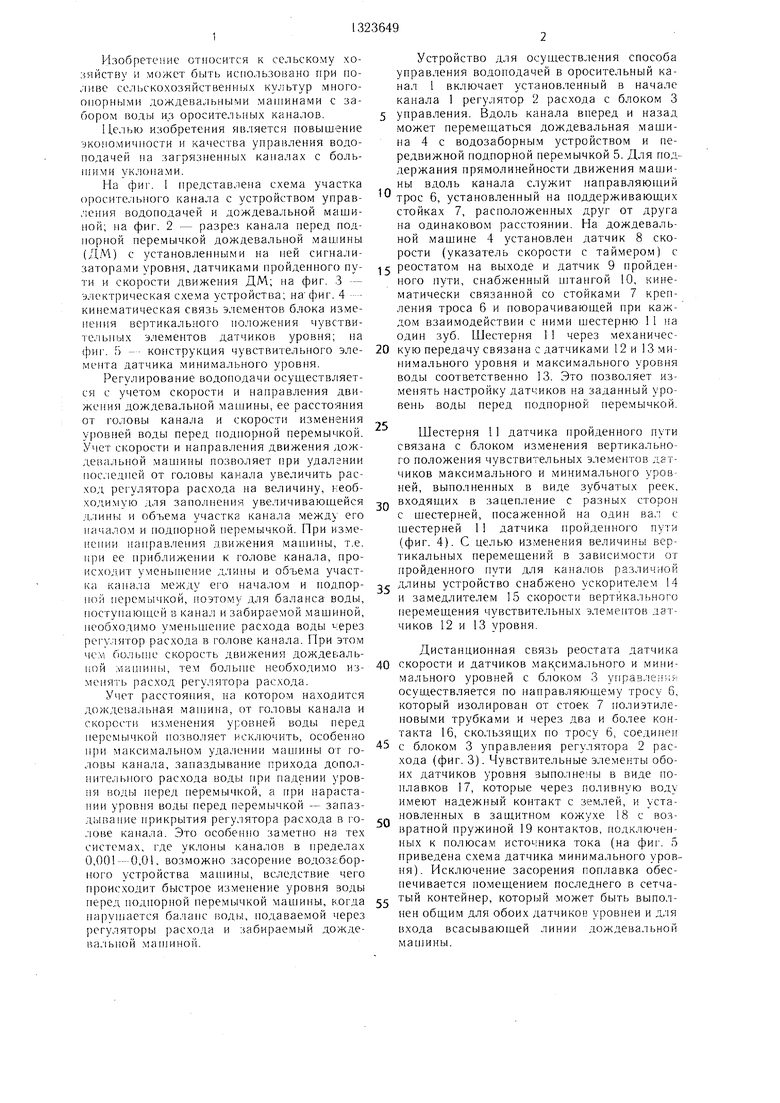
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления водоподачей в оросительный канал с дождевальной машиной и устройство для его осуществления | 1986 |
|
SU1351994A1 |
| Оросительная система | 1984 |
|
SU1275073A1 |
| Система регулирования водоподачи | 1986 |
|
SU1469501A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1319804A1 |
| Способ распределения воды на участке канала,ограниченном стационарными сооружениями | 1984 |
|
SU1260439A1 |
| Система управления водоподачей в ороситель с дождевальной машиной | 1987 |
|
SU1496718A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1287793A1 |
| Автоматизированная оросительная система | 1983 |
|
SU1165312A1 |
| Автоматизированная оросительная система | 1988 |
|
SU1551291A1 |
| Способ автоматизированного водораспределения на открытых оросительных системах | 1988 |
|
SU1604264A1 |
Изобретение относится к сельскому хозяйству и предназначено для автоматизации управления водоподачи в оросительный канал с забором из него воды для полива многоопорной дождевальной машиной (ДМ). Цель изобретения - повышение экономичности и качества управления водо- подачей на загрязненных каналах с большими уклонами. Способ управления водо- подачей в оросительный канал реализуется устройством управления. Управление регулятором расхода 2 осуш,ествляют с помош,ью блока управления 3. Блок управления работает по сигналам датчиков пройденного пути и направления движения ДМ. Для учета подачи необходимого дополнительного положительного (или отрицательного) расхода важно учитывать направление движения ДМ вниз (или вверх) по течению. Способ предлагает использование для управления сигналов двух датчиков минимального и максимального уровней воды перед подпорной перемычкой. Датчики сигнализируют о недостатке воды или переполнение канала перед ДМ. Положение в вертикальной плоскости датчиков при движении ДМ изменяется посредством механической связи чувствительных элементов датчиков с шестерней. Блоком управления 3 учитывается заданная скорость движения ДМ. Подача сигнала с реостата датчика скорости 8 ДМ осушествляется через контакты 16 и изолированный от земли направляюший трос 6. Для каналов различной длины передаточное отношение кинематической связи от датчика пройденного пути к чувствительным элементам датчиков уровней воды изменяется. Изменение осушествляется заменой зубчаты.х шестерен. Оно дает дополнительные преимущества участка инерционности каналов с различной длиной и уклонами. 2 с.п. ф-лы, 5 ил. (О (Л Фиг./ со N3 ОС О5 Npii со
4
I
s
N
О
-Cf
/J / 77
AA
c-
/7 //
TiJ i лr
ф. J
H
A-A
/5,
Составитель Г. Нараев
Редактор М. БандураТехред И. ВересКорректор Г. Решетник
Заказ 2938/33Тираж 606Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 45 Производственно-полиграфическое предприятие, г. Ужгород, .. Проектпия, 4
фиг. 5
| Оросительная система | 1984 |
|
SU1275073A1 |
