вания. В корпусе 1 устройства с входной и выходной полостями установлены первый чувствительный элемент А, передающий свое воздействие через шток 7 на первый регулируюпшй орган 8, связанный с первой пруткиной 9 и с первой пружиной 10 задания, второй чувствительный элемент 11, связанный с второй пружиной задания 12 и вторым регулирующим органом 13, однонаправленный передаточный механизм, входное
1
Изобретение относится к пневмоавтоматике, может быть использовано в пневмосистемах и является усовершенст вованием известного устройства по авт. св. № 1166074.
Цель изобретения - повьшение точности регулирования.
На чертеже схематично изображено устройство для регулирования давления о
Устройство содержит корпус I с входной 2 и выходной 3 полостями, в котором установлен первый чувствительный элемент 4, выполненный в виде ступенчатого поршня, образующего меяг ду ступенями первую пневмополость 5, сообщенную дросселем 6 с атмосферой. Первый чувствительный элемент 4 передает свое воздействие через шток 7 на первый регулирующий орган 8, установленный между входной 2 и выходной 3 полостями и связанный с первой пружиной 9, и связан с первой пружиной .10 задания. Второй чувствительный элемент 11 установлен в первом чувствительном элементе 4 и связан с первым торцом второй пружины 12 задания и вторым регулирующим органом 13, вход которого сообщен с выходной полостью 3, а выход - с первой пневмо- полостью 5. Вторая пружина 14 установлена между первым чувствительным элементом 4 и вторым регулирующим органом 13, выход которого сообщен с первой пневмополостью 5 через вторую пневмополость 15, которая образована первым 4 и вторым 11 чувствительными элементами. Вторая пружина 12 задания
звено которого - рычаг 17 на оси 18 - связано со штоком 7, а выходное звено - рычаг 19 на оси 20 - через толкатель 2 с вторым регулирующим органом 13, Снабжение устройства для регу- лир.ования давления передаточным механизмом с определенным передаточным отношением позволяет повысить точность регулирования давления. 1 з,п. ф-лы, 1. ил.
связана вторым торцом с элементом 16, связанным с корпусом 1.
На первом чувствительном элементе 4 установлен однонаправленный пере- даточный механизм (проекции векторов перемещения входного и выходного . звеньев на ось устройства имеют одно направление), входное звено которого (рычаг 17 на оси 18) связан со штоком 7, а выходное звено (рычаг 19 на оси 20) связано через толкатель 21 с вторым регулирующим органом 13,
Передаточное отношение механизма (отношение величины перемещения выходного звена к величине перемещения входного звена по оси устройства) выбрано в соответствии с зависимостью
Fa
Л
где К„ - разница площадей большей и Меньшей ступеней первого чувствительного элемента; F. - площадь второго чувствитель25 ного элемента,
В свою очередь F и F связаны зависимостью
1
Kj
к,- FZ
где К, - жесткость первой пружины задания ;
К - жесткость второй пружины задания.
Устройство ДО1Я регулирования дав- ления работает следующем образом. Когда устройство настроено на требующееся выходное давление путем Сжатия первой пружины 10 задания и . входное давление не подано, первый
регулирующий орган 8 отжат от седла, второй регулирующий орган 13 под усилием второй пружины 12 задания, превышающем усилие от рычага 19, отжат от седла.
При подаче давления во входную полость 2 давление в полостях 3, 15 и 5 начинает возрастать. При повышении давления во второй пневмополости 13 до некоторой величины второй- чувствительный элемент 11 перемещается в направлении сжатия второй пружины 12 задания и второй регулирующий орТочность регулирования давления при этом достигается за счет автоматического изменения давления в первой пневмополости 5 в зависимости от изменения усилия первой пружины 10 задания и изменения усилия со стороны первого регулирующего органа 8 (усилия герметизации седла, усилия первой пружины 9, реактивной силы, силы возние давления в полости 5 обеспечивается оттоком среды через дроссель 6. Изменения усилий первой пружины К) задания, связанных с перемещением первого чувствительного элемента 4, компенсируются посредством деформации второй пружины 12 задания и соответствующего этой деформации изменения давления в полостях 15 и 5, воздействующего на площадь V,
Г
ган 13 перекрывает свое седло в такой j5 действия входного давления). Уменьше- мере, чтобы лишь обеспечить расход среды через дроссель 6.
Когда запорный элемент перед потребителем среды закрыт, давление в выходной полости 3 возрастает до тре- 2о бующегося давления настройки.
После чего первый регулирующий орган 8 перекрывает свое седло, обеспечивая однако расход среды через второй регулируюпц й орган 13, При этом пер- 26 вый чувствительный элемент 4 находится в равновесии под действием усилий от давлений в полостях 3, 5 и 15, первой пружины 10 задания и со стороны первого регулирующего органа 8.
Часть усилия со сторош 1 регулирующего органа 8 через рычаги 17 и 19 и толкатель 21 и второй регулирующий орган 13 передается на второй чувствительный элемент 11 и суммируется (со знаком минус) с усилием второй пружины 12 задания. Выделение этой части усилия обеспечивается передаточным отношением механизма, равным от30
Изменения усилия со стороны первого регулирующего органа компенсируются так же,как и в безрасходном режиме посредством передачи части усилия че-. рез второй регулирую1ций орган J3 на второй чувствительный элемент 1 и дополнительного изменения, вследствие этого, давления в полостях 15 и 5.
Таким образом, изменения усилия на двух звеньях устройства (первой пружины 10 задания и первом регулирующем органе 8) передаются в конечном счете на второй чувствительный элемент 11, преобразуются в суммарное 40 изменение давления р первой пневмополости 5 и при правильно выбранных площадях, жесткостях пружин и передаточного отношения механизма полностью компенсируются, чем достигается по35
F ношению .
г При этом соотношении все изменения
усилий со стороны первого регулирующего органа 8, трансформируясь в из-
менения давления в полостях 15 и 5, 45 вьшгение точности регулирования, полностью компенсируются путем воздействия давления в полости 5 на площадь FM,
в случае равенства площадей F. и
При проектировании устройства ционально вначале определить жес ти пружин и площади входящие в с ношение
Т„ передаточный механизм может быть 50 выполнен как одно звено с поступательным перемещением по оси устройства (с передаточным отношением ).
В расходном режиме устройство может работать в условиях изменения входного давления и расхода среды. В таком режиме за счет реакции первого чувствительного элемента 4 на выходное давление первый регулирующий орК„
К, F
и обуславливающие компенсацию из ния усилия первой пружины задани 55 Далее по выбранным F и F опред передаточное отношение механизма
Использование изобретения поз повысить точность регулирования д ления в системах газоснабжения.
ган 8 автоматически и в нужной мере перемещается относительно своего сед- , ла, обеспечивая баланс притока-оттока среды и требующееся выходное давление.
Точность регулирования давления при этом достигается за счет автоматического изменения давления в первой пневмополости 5 в зависимости от изменения усилия первой пружины 10 задания и изменения усилия со стороны первого регулирующего органа 8 (усилия герметизации седла, усилия первой пружины 9, реактивной силы, силы воздействия входного давления). Уменьше-
ние давления в полости 5 обеспечивается оттоком среды через дроссель 6. Изменения усилий первой пружины К) задания, связанных с перемещением первого чувствительного элемента 4, компенсируются посредством деформации второй пружины 12 задания и соответствующего этой деформации изменения давления в полостях 15 и 5, воздейдействия входного давления). Уменьше-
ствующего на площадь V,
Г
26
30
Изменения усилия со стороны первого регулирующего органа компенсируются так же,как и в безрасходном режиме посредством передачи части усилия че-. рез второй регулирую1ций орган J3 на второй чувствительный элемент 1 и дополнительного изменения, вследствие этого, давления в полостях 15 и 5.
Таким образом, изменения усилия на двух звеньях устройства (первой пружины 10 задания и первом регулирующем органе 8) передаются в конечном счете на второй чувствительный элемент 11, преобразуются в суммарное 40 изменение давления р первой пневмополости 5 и при правильно выбранных площадях, жесткостях пружин и передаточного отношения механизма полностью компенсируются, чем достигается по35
вьшгение точности регулирования,
При проектировании устройства рационально вначале определить жесткости пружин и площади входящие в соотношение
К„
К, F
50
и обуславливающие компенсацию изменения усилия первой пружины задания. 55 Далее по выбранным F и F определить передаточное отношение механизма.
Использование изобретения позволит повысить точность регулирования давления в системах газоснабжения.
Формула изобретения
1 Устройство для регулирования давления по авт св. № 1166074j о т- ли чающееся тем, что с целью повышения точности устройства, оно снабжено передаточным механизмом установленным на первом чувствительном элементеS входное звено переда точного механизма связано со штокоМа а выходное - с вторым регулируюпщм органом, причем передаточное отношение передаточного механизма определено зависимостью
, Fa
Редактор НвКобкова Заказ 5693/43
Составитель Н.Расчетнов
Техред М.Яоданнч Корректор М.Максиголпинец
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятиеs г Ужгород, ул. Проектная, 4
17
где F,.
F, разница площадей большей и меньгаей ступеней первого чувствительного элемента; площадь второго чувствительного элемента.
10
2. Устройство по пИ, отличающее с я тем, что выполнено соотношение
Кг
К, F
. „ i
где К коэффициент жесткости второй
пружины задания;
К, - коэффициент жесткости первой пружины задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования давления (его варианты) | 1983 |
|
SU1166074A1 |
| Устройство для регулирования давления газа | 1988 |
|
SU1541568A2 |
| Регулятор давления газа | 1988 |
|
SU1580330A1 |
| Регулятор давления газа (его варианты) | 1982 |
|
SU1103210A1 |
| Регулятор давления газа | 1987 |
|
SU1413609A1 |
| Регулятор давления газа | 1984 |
|
SU1196825A1 |
| Регулятор давления газа | 1982 |
|
SU1078411A1 |
| Устройство для регулирования давления газа | 1982 |
|
SU1043607A1 |
| Устройство для регулирования давления газа | 1986 |
|
SU1374192A2 |
| Устройство для регулирования давления газа | 1984 |
|
SU1236443A2 |
Изобретение отйосится к пневмоавтоматике, может быть испольаоаано в пневмосистемах и является усонер- шенствованием устройства по основно у а, с. N 1166074, Целью изобретения является повышерше точности регулироG: со СЛ гч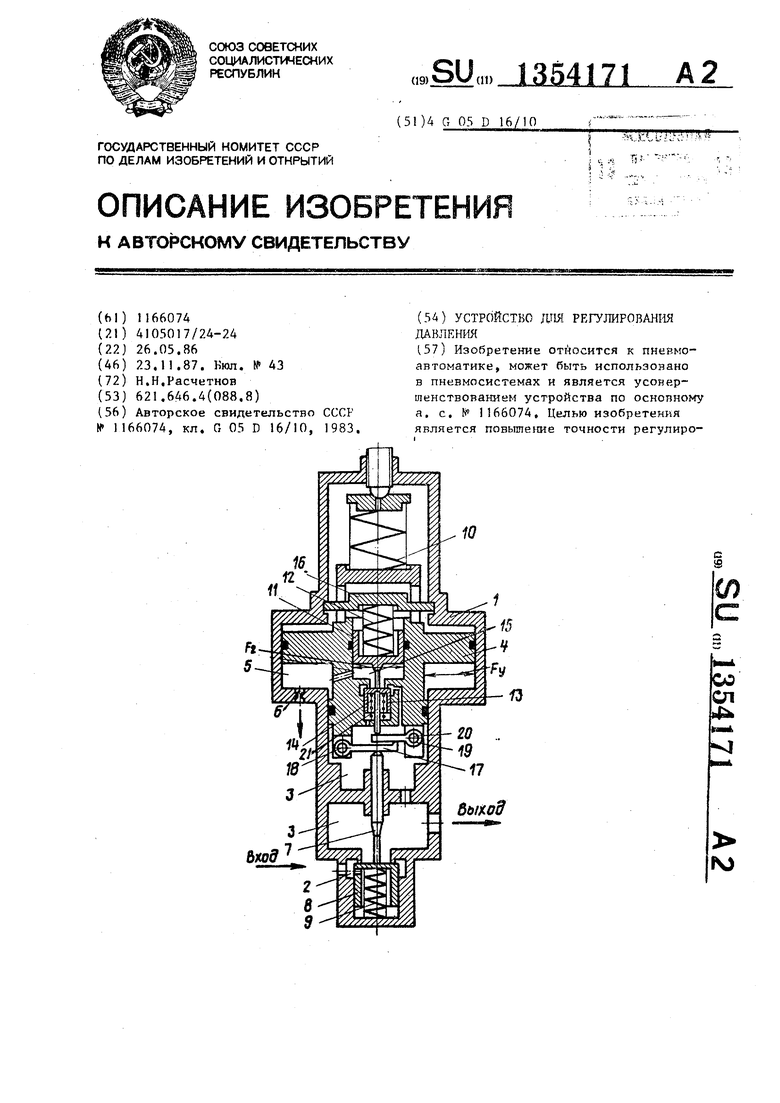
| Устройство для регулирования давления (его варианты) | 1983 |
|
SU1166074A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
