Изобретение относится к электротехническим соединительным устройст- В4М и может быть использовано в ра- диоэлектронной аппаратуре.
Цель изобретения - упрощение конструкции.
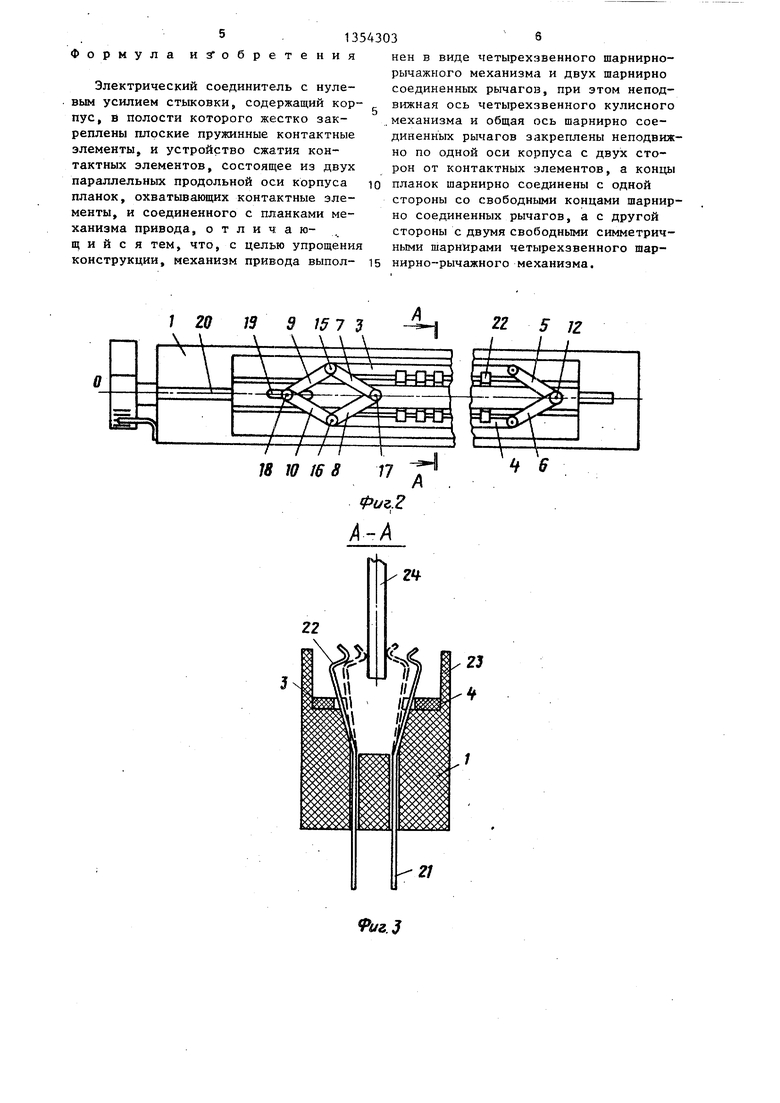
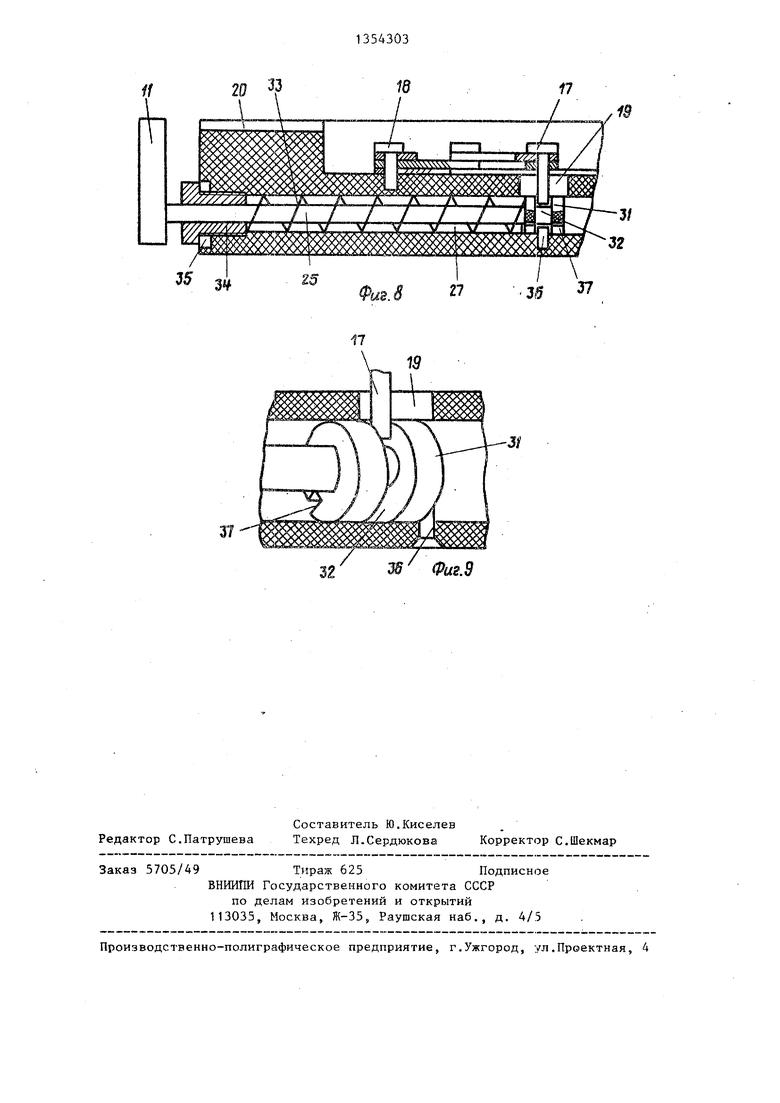
На фиг. 1 изображен предлагаемый соединитель, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 2 на фиг. 4 - планка, вариант исполнения; на фиг. 5 - элемент привода; на фиг. 6 - вид Б на фиг, 5; на фиг. 7 - элемент привода,«вариант; на фиг. 8 - то же, вариант; на фиг. 9 - то же, вариант.
В корпусе 1 на одной из граней, например верхней, выполнено углубление , в котором размещены два ряда контактных элементов 2 по п контактов в каждом ряду. Контактные элементы закреплены на некотором расстоянии один от другого и симметрично относительно вертикальной плоскости
20 например ромба. При этом большая диагональ ромба, проходящая через оси- шарниры 17 и 18 лежит в вертикальной плоскости, проходящей через ось симметрии 0-0. Одна из вершин этой диаасимметрии, лежащей между рядайи кон- 25 гонали должна быть Закреплена неподтактных элементов и проходящей, например,через продольную ось симметрии 0-0 корпуса.
В этом же углублении в верхней части корпуса 1 размещено устройство сжатия Контактов, содержащее четырех- звенный шарнирный рычажный механизм, шарнирно соединенные рычаги и две планки 3 и 4, оказывающие воздействие на контактные элементы, идентичные рычаги (тяги) 5и6, 7и8, 9и10, также выполненные в форме планок. Планки 3 и 4 выполнены из изоляционного материала и установлены снаружи
рядов контактов с возможностью равно- до вдоль оси симметрии 0-0 в корпусе удаленного от оси симметрии 0-0 и- предусмотрен паз 19 (фиг . 1, 2, 5,
одновременного возвратно-поступательного движения для воздействия на пружинные участки контактов 2 по сопрягаемой линии или по сопрягаемой поверхности при соответствующей форме контактной поверхности планки (не показана).
Для обеспечения одновременного воздействия на все контактные элементы ряда планки 3 и 4 имеют одинаковое сечение по всей длине, например прямоугольное. Планка со ступенчатой сопрягаемой поверхностью (фиг. 4) обеспечивает приоритетное воздействие на некоторые контакты ряда, что дает возможность более раннего (позднего) подключения некоторых цепей, например цепей питания или др. цепей.
Движение планок 3 и 4 обеспечиватся с помощью шарнирного соединения с тягами 5-10, кинематически соединенными с ручкой 11 управления. Тяги 5-10 соединены попарно: 5 и 6, 7 и 8, 9 и 10.
Концы первой пары тяг 5 и 6 шар- нирно соединены между собой на оси
12, жестко закрепленной на корпусе 1 и лежащей в вертикальной плоскости, проходящей через ось симметрии 0-0. Вторые, концы тяг 5-6 шарнирно соединены в осях 13 и 14 с концами приводных планок 3 и 4 соответственно.
Другие концы планок 3 и 4 также шарнирно при помощи осей 15 и 16 соединены двумя парами тяг 7 и 9, 8 и 10, образуют стороны четырехугольника,
например ромба. При этом большая диагональ ромба, проходящая через оси- шарниры 17 и 18 лежит в вертикальной плоскости, проходящей через ось симметрии 0-0. Одна из вершин этой диагонали должна быть Закреплена неподвижно на корпусе, другая - подвижно относительно него. В первом варианте исполнения соединителя (фиг. 1 и 5) неподвижно закреплена на корпусе осьшарнир 17, а ось-шарнир 18 подвижна относительно корпуса. В третьем варианте исполнения кинематической связи (фиг. 8) неподвижно закреплена на корпусе ось 18, а подвижней - ось 17.
Неподвижные оси выполнены в виде оси-винта (не изображено), а подвижные оси, например, в виде пустотелых заклепок.
Для перемещения оси 18 (фиг. 1-2)
7), ось которого также лежит„ в вертикальной плоскости, проходящей через ось симметрии 0-0. Паз 19 открыт также в сторону оси ручки управления.
На верхней грани корпуса выполнен также паз 20 для установки печатной платы, ось которого также лежит в вертикальной плоскости. Паз 20 открыт с торца конуса в сторону ручки 1 1 управления, что позволяет устанав- ливать печатную плату как сверху, так и с торца соединителя.
.Каждый контактный элемент 2 имеет
прямолинейный участок 21 для подсоединения внешних цепей и пружинящий участок 22, расположенный под острым углом, например 15 , к участку 21. Контактные элементы установлены в
. корпусе так, что изгиб пружинящего участка обращен наружу, к приводной планке. Удлиненный участок 22 соединен под прямым углом с контактным участком, имеющим отогнутый хвостовик. Контакт с проводником печатной платы обеспечивается в месте изгиба хвостовика.
Шаг размещения контактов 2 в ряду должен соответствовать щагу проводников на печатной плате или шагу контактов разъема.
Выступающие стенки 23 корпуса предохраняют от повреждения пружинные участки контактов. Печатная плата обозначена позицией 24.
Разработано три варианта кинема.- тического соединения узла смещения контактов с ручкой управления элементом привода, обеспечивающих плавную регулировку контактного давления при этом в вариантах на фиг. 5 и 7 вращательное движение ручки 11 преоб 1разовано в возвратно-поступательное перемещение подвижной оси 18. В варианте на фиг. 8-9 ручка 11 соверща- ет поступательное движение под действием пружины.
В первом варианте ось ручки 11 имеет резьбу, на этом участке оси 25 навернута гайка 26 (фиг. 5). Ось 25 размещена в отверстии 27, открытом с торца корпуса и соединенном пазом 19 с углублением в верхней части корпуса .
Во всех вариантах (фиг. 5-7) ручка 11 фиксируется в определенном положении с помощью пружинного стопора 28. На торце корпуса нанесены деления шкалы, соответствующие определенному контактному давлению.
Ось 25 ручки управления жестко связана с кулачком 29, имеющим профильный паз 30, в который входит ось 18 (фиг. 7).
В варианте на фиг. 8 ось 25 ручки 11 заканчивается кулачком 31, имеющим поперечный паз 32, в который входит ось 17. Ось 25 служит направляющей для пружины 33 сжатияJ упирающейся одним концом в кулачок 31, а другим - в гайку 34, ввернутую в корпус 1 с возможностью перемещения ее вдоль оси 25 для изменения деформации пружины 33, работающей на сжатие Для размещения гайки 34 в корпусе выполнено отверстие 35, открытое с торца и переходящее в отверстие 27,
5
543034
при этом на стенке отверстия 27 выполнена резьба (фиг. 8) для гайки 34. Стопор 36 обеспечивает фиксацию кулачка 31 на время установки платы в соединитель (фиг. 9), который закреплен жестко в корпусе.
В кулачке выполнен также продольный паз 37 (фиг. 8, 9), предназначен10 ный для взаимодействия со стопором 36.
Работает электрический соединитель с нулевым усилием стыковки следующим образом.
В исходном положении контакты сое15 нормально разомкнуты. В этом положении флажок 11 не перекрывает паз 20 и не препятствует установке в него печатной платы вдоль паза до упора.
20 При повороте ручки 11 по часовой стрелке до положения, соответствующего риске шкалы 1 (фиг. 1, 6) гайка 26 смещается вместе с жестко соединенной с ней осью 18, что вызывает
25 плоскопараллельное перемещение планок 3 и 4 навстречу (фиг. 5). При
о этом пружинящие участки 22 смещаются навстречу, а хвостовики сопрягаются с ответными контактами на печатной
30 плате (или в разъеме).
В варианте на фиг. 7 при повороте ручки 11 ось 18 взаимодействует с профильным пазом 30 кулачка 29 и
2g перемещается в сторону ручки. Это вызывает замыкание контактов соединителя с печатными проводниками печатной платы вследствие описанного движения приводных планок 3 и 4.
40 В варианте на фиг. 8 и 9 для установки печатной платы ручку 11 следует оттянуть на себя. При этом кулачок 31 перемещается влево за стопор 36 (фиг. 9), также влево пере45 мещается ось 17, планки 3 и 4 расходятся, освобождая пружинящие участки контактов для установки платы.
После установки платы ручку 11 поворачивают впр аво до совпадения
50 паза 37 со стопором 36, после чего под действием пружины 33 кулачок 31 вместе с ручкой 11 возвращается в исходное положение.
При необходимости увеличения конg тактного давления гайка 34 вворачивается в корпус 1 и поджимает пружи- ну 33. °
Положительный эффект достигается упрощением конструкции.
Формула иэсобретения
Электрический соединитель с нулевым усилием стыковки, содержащий корпус, в полости которого жестко закреплены плоские пружинные контактные элементы, и устройство сжатия контактных элементов, состоящее из двух параллельных продольной оси корпуса планок, охватывающих контактные элементы, и соединенного с планками механизма привода, отличаю10
нен в виде четырехзвенного шарнирно- рычажного механизма и двух шарнирно соединенных рычагов, при этом неподвижная ось четырехзвенного кулисного механизма и общая ось шарнирно соединенных рычагов закреплены неподвиж но по одной оси корпуса с двух сторон от контактных элементов, а концы планок шарнирно соединены с одной стороны со свободными концами шарнир но соединенных рычагов, а с другой стороны с двумя свободными симметрич-
щ и и с я тем, что, с целью упрощения ными шарнирами четырехзвенного шар- конструкции, механизм привода выпол- 15 нирно-рычажного механизма.
нен в виде четырехзвенного шарнирно- рычажного механизма и двух шарнирно соединенных рычагов, при этом неподвижная ось четырехзвенного кулисного механизма и общая ось шарнирно соединенных рычагов закреплены неподвижно по одной оси корпуса с двух сторон от контактных элементов, а концы планок шарнирно соединены с одной стороны со свободными концами шарнирно соединенных рычагов, а с другой стороны с двумя свободными симметрич-

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический соединитель для печатных плат с нулевым усилием сочленения | 1983 |
|
SU1132316A1 |
| ВСТАВКА ДЛЯ СКРЫТОЙ ПРОВОДКИ ЭЛЕКТРИЧЕСКОГО МОНТАЖНОГО УСТРОЙСТВА | 2015 |
|
RU2686688C2 |
| Соединитель с нулевым усилием сочленения | 1986 |
|
SU1387080A1 |
| Устройство для подключения печатных плат | 1987 |
|
SU1474873A1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2007 |
|
RU2323556C1 |
| Ползунковый переключатель с индикацией | 1981 |
|
SU989603A1 |
| Электрический разъем с нулевым усилием сочленения | 1981 |
|
SU978248A1 |
| Устройство для установки и извлечения печатных плат из радиоэлектронного блока | 1981 |
|
SU1003401A1 |
| Соединитель для печатных плат | 1985 |
|
SU1267517A1 |
| ШТЕКЕР ДЛЯ ЭКРАНИРОВАННОГО КАБЕЛЯ ПЕРЕДАЧИ ДАННЫХ | 2006 |
|
RU2395880C2 |

Изобретение относится к электрическим соединителям и может быть использовано в радиоэлектронной аппаратуре. Цель изобретения - упрощение конструкции. Цель достигается тем, что в электрическом соединителе с нулевым усилием стыковки, содержащей корпус 1, в углублении на одной из граней которого закреплены в два параллельных ряда плоские пружинные контактные элементы 2 с устройством to Р . ктть апощея теле ржадной два ные вом сжатия, состоящим из двух параллельных оси корпуса 1 планок 3 и 4, установленных снаружи рядов контактов 2 с возможностью возвратно-поступательного движения для воздействия на пружинящие участки 22 контактов 2 и связанных с механизмом привода, который содержит четырехзвенньш шарнирно- рычажный механизм, состоящий из шар- нирно связанных рычагов - тяг 7-10 и два рычага-тяги 5 и 6, которые шар- нирно Соединены одними концами на оси 12, а другими концами шарнирно соединены осями 1Э и 14 с концами планок 3 и 4, другие концы которых шарнирно соединены осями 15 и 16 с двумя свободными шарнирами, образованными парами рычагов - тяг 7-10. Одна из осей шарнирно-рычажного механизма и общая ось 12 рычагов - тяг 5 и 6 закреплены неподвижно вдоль оси корпуса 1. Срабатывание привода обеспечивается поворотом ручки 11, смещающей ось 18. 9 ил. а « с7 (Л со ел 4 СО О Юо ft п 18 Ю
i
W W 16 8 17
гг 5 12
Ч 6
21
иг/5
14
Фиг.
20
ff
bud 6
2& 25 27
(Раг. J
9иг.б
в
/7 Z
If
18
17
827
30
15
3 Фиг.З
Редактор С.Патрушева
Составитель Ю.Киселев
Техред Л.Сердюкова Корректор С.Шекмар
Заказ 5705/49Тираж 625Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Герметичный электрический соединитель | 1978 |
|
SU792383A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4085990, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
