11
Изобретение относится к технике регулирования газовоздушного режима мощных котлоагрегатов, оборудованных тягодутьевыми машинами для подачи воздуха и отвода дымовых газов.
Цель изобретения - повышение статической точности регулирования экономичности работы котлоагрегата за счет повышения вероятностиL и, соответственно, времени нахождения регулируемых параметров в середине заданных зон нечувствительности, что повышает статическую и динамическую точность поддержания избытка воздуха и р.азрежения в топке котла.
На фиг. 1 представлена структурна схема системы автоматического регулирования газовоздушного режима котло
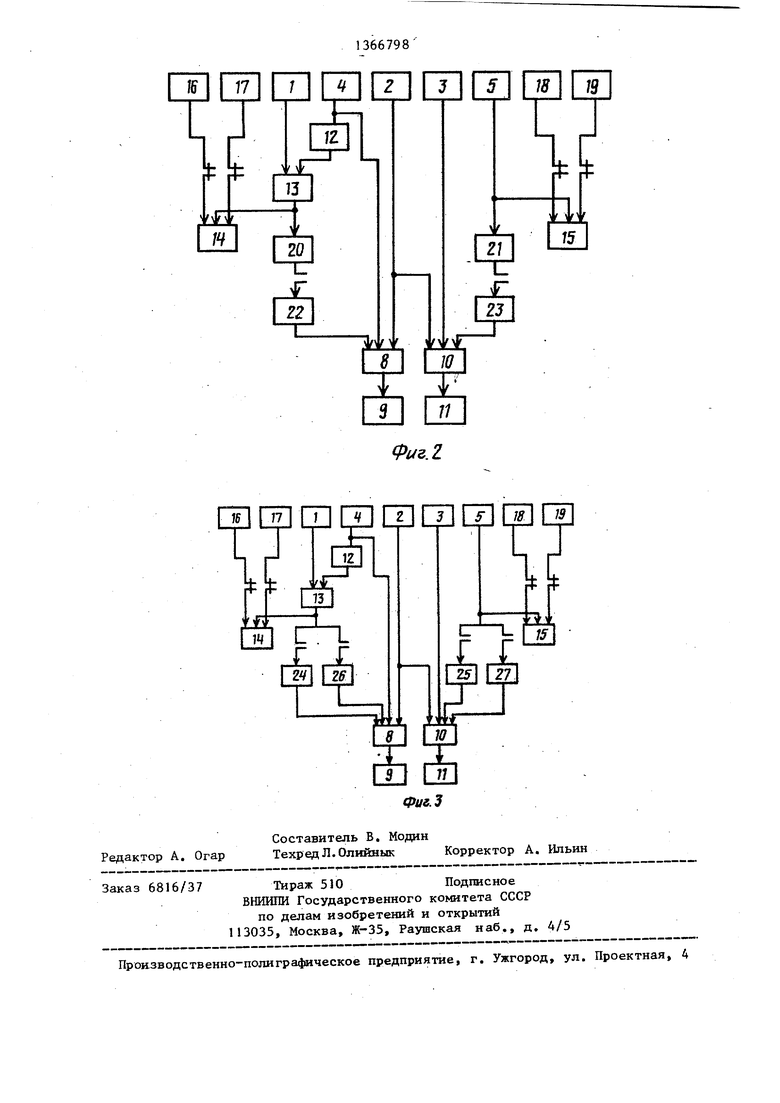
На фиг. 3 дополнительно к элементам схемы по фиг. 1 показаны пропорциональные блоки 24 и 25 регуляторов, интегрирующие блоки 26 и 27 регуляторов.
На схеме по фиг. 1 датчик 1 содержания кислорода подключен к сумматору 13, выход которого соединен одновременно с входом АРП Г4 и через нормально открытый контакт данного АРП 14 с входом корректирующего регулятора 6 общего воздуха, выход которого соединен с входом основного регулято- ра 8, к входам которого подсоединены также выходы датчика 2 мощности двигателя дутьевого вентилятора и задат- чика 4. Выход регулятора 8 соединен с входом исполнительного механизма 9.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования газовоздушного режима котлоагрегата | 1980 |
|
SU905577A1 |
| Система автоматического регулирования газовоздушного режима котлоагрегата | 1983 |
|
SU1176145A1 |
| Устройство для энергосберегающего управления воздушными и тепловыми потоками тягодутьевого механизма промышленного котлоагрегата | 2017 |
|
RU2707097C2 |
| Система автоматического регулирования процесса горения котла малой мощности с низкотемпературным кипящим слоем и способ ее работы | 2018 |
|
RU2692854C1 |
| Система управления процессом сжигания отработанного щелока сульфат-целлюлозного производства | 1983 |
|
SU1233098A1 |
| Система автоматического регулирования разрежения в топке парогенератора | 1980 |
|
SU928134A1 |
| Система автоматического регулирования процесса горения | 1981 |
|
SU1035342A1 |
| Система автоматического регулирования процесса горения в котлоагрегате для сжигания твердого топлива в кипящем слое | 2018 |
|
RU2680778C1 |
| Система автоматического регулирования процесса горения силовой установки с активным котлом-утилизатором высокотемпературного кипящего слоя | 2018 |
|
RU2686238C1 |
| Система автоматического регулирования процесса горения силовой установки с активным котлом-утилизатором высокотемпературного кипящего слоя с воздухоподогревателем | 2018 |
|
RU2693350C1 |
Изобретение позволяет повысить статическую точность регулирования. Система содержит датчики 1, 2, 3 содержания кислорода в продуктах сгорания, датчик мощности двигателя дутьевого вентилятора, датчик мощности двигателя дымососа, задатчик 4 по нагрузке, датчик 5 разрежения в топке, корректирующий регулятор 7 разрежения, основной регулятор 8 общего воздуха, исполнительный механизм 9 регулирующих органов вентилятора, основной регулятор 10 разрежения, исполнительный орган 11 регулирующих органов дымососа, нелинейный блок 12 для ввода неравномерности по нагрузке по величине содержания кислорода, сумматор 13, аналого-релейные преобразователи (АРП) 14 и 15, датчики 16, 17, 18, 19 опорных сигналов. При существенном изменении содержания кислорода, выходящем за установленную зону нечувствительности, АРП 14 отключается и своими контактами отключает сигнал корректирующего регулятора 6 и подключает к АРП 14 датчики 16 и 17. Этим обеспечивается достаточное точное поддержание значения кислорода в середине заданной зоны нечувствительности. Регулятор разрежения обеспечивает высокую статическую точность поддержания разрежения в топке строго в середине заданной зоны нечувствительности по разрежению. 2 з.п.-.ф- лы, 3 ил. (Л со а а QD 0
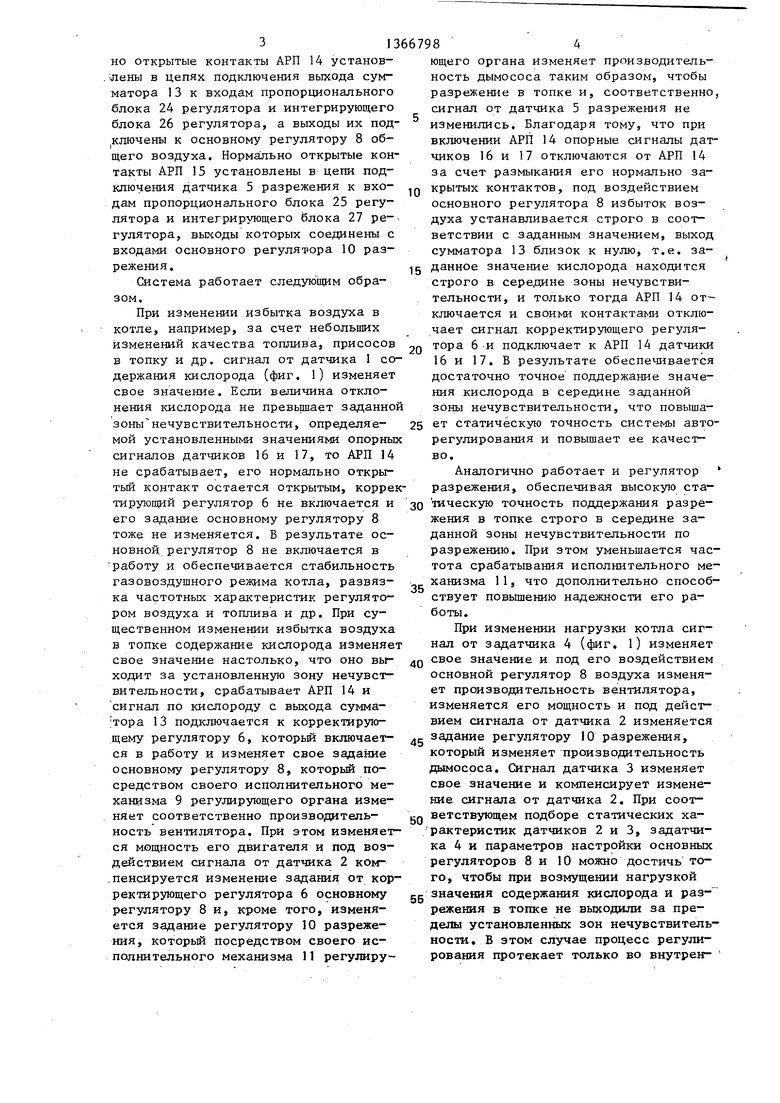
агрегата; на фиг. 2 - структурная схе-2о Целинейный блок 12 подключен своим схема системы, в которой корректирую- входом к задатчику 4, а выходом - к щие регуляторы выполнены в виде после- сумматору 13. К АРП 14 подсоединены
довательно соединенных релейного регулирующего прибора (РП) и блока импульсного интегрирования (БИИ), а нормально разомкнутые контакты анало- го-релейных преобразователей (АРП) установлены в цепи подключения РП и БИИ; на фиг. 3 - структурная схема си35
системы, в которой корректирующие ре- З0 °нтакт данного АРП 15 с входом корректирующего регулятора 7 разрежения, выход которого соединен с входом основного регулятора 10 разрежения, к которому подсоединены также выходы датчиков 2 и 3 мощности двигателей дутьевого вентилятора и дымосеса. Выход регулятора 10 соединен с входом исполнительного механизма П. К АРП 15 подсоединены через его нормально 40 закрытые контакты датчики 18 и 19 опорных сигналов. Полярность опорного сигнала датчика 18 положительная, а датчика 19 - отрицательная.
На схеме фиг. 2 по сравнению со схемой на фиг. 1 корректирующие регуляторы 6 и 7 вьшолнены в виде -последовательно соединенных релейных РП 20 и 21 и БИИ 22 и 23 соответственно . Нормально открытый контакт АРП 14 установлен в цепи подключения релейного РП 20 к БИИ 22, а АРП 15 - в цепи подключения релейного РП 21 к БИИ 23.
На схеме фиг. 3 по сравнению со . схемой на фиг. 1 корректирующие регуляторы 6 и 7 выполнены в виде пропорциональных блоков 24 и 25 регуляторов и интегрирующих блоков 26 и 27 регуляторов соответственно. Нормальгуляторы выполнены в виде отдельных блоков - пропорционального и интегрирующего, а контакты АРП установлены в цепях подключения сигналов к каждому из пропорционального и интег- рнр ующего блоков.
Схема, приведенная на фиг. 1, содержит датчик 1 содержания кислорода в продуктах сгора1шя, датчик 2 мощности двигателя дутьевого вентилятора, датчик 3 мощности двигателя дымососа, задатчик 4 по нагрузке, например, от регулятора мощности блока, датчик 5 разрежения в топке, корректирующий регулятор 6 общего воздуха, корректирующий регулятор 7 разрежения, основной регулятор 8 общего воздуха, исполнительный механизм 9 регулирующих органов вентилятора, основной регулятор 10 разрежения, исполнительный механизм 11 регулирующих органов дымососа, нелинейный блок 12 для ввода неравномерности по нагрузке по величине содержания кислорода, сумматор 13, АРП 14 и 15, а также датчи- ,ки 16 - 19 опорных сигналов. :
На фиг. 2 дополнительно к элементам схемы по фиг. 1 показаны .релейные РП 20 и 21 и БИИ 22 и 23.
45
50
55
через его нормально Закрытые контакты датчики 16 и 17 опорных сигналов. 25 Полярность опорного сигнала датчика 16 полозштельная, а датчика 17 - отрицательная. Датчик 5 разрежения в топке соединен одновременно с входом АРП 15 и через нормально открытый
10
20
31366798
но открытые контакты АРП 14 установ- ены в цепях подключения выхода сумматора 13 к входам пропорционального блока 24 регулятора и интегрирующего блока 26 регулятора, а выходы их под- |КЛЮчены к основному регулятору 8 общего воздуха. Нормально открытые контакты АРП 15 установлены в цепи подключения датчика 5 разрежения к входам пропорционального блока 25 регулятора и интегрирующего блока 27 ре-- гулятора, выходы которых соединены с входами основного регулятора 10 разрежения.
Система работает следую щим образом.
При изменении избытка воздуха в котле, например, за счет небольших изменений качества топлива, присосов в топку и др. сигнал от датчика 1 содержания кислорода (фиг. 1) изменяет свое Значение. Если величина отклонения кислорода не превьрает заданной зоньГнечувствительности, определяемой установленными значениями опорных сигналов датчиков 16 и 17, то АРП 14 не срабатывает, его нормально откры- тьй контакт остается открытым, коррек- тирующий регулятор 6 не включается и его задание основному регулятору 8 тоже не изменяется. В результате основной регулятор 8 не включается в работу и обеспечивается стабильность газовоздушного режима котла, развязка частотных характеристик регулятором воздуха и топлива и др. При существенном изменении избытка воздуха в топке содержание кислорода изменяет свое значение настолько, что оно выходит за установленную зону нечувствительности, срабатывает АРП 14 и сигнал по кислороду с выхода сумма- тора 13 подключается к корректирую-
ющ но ра си из вк чи за кр ос ду ве су
15 да ст те кл ча то до ни зо ет ре во
ра
30 ти же да ра то ха ст бо
на св ос ет из ви
25
35
40
щему регулятору 6, которьй включает- дд задание регулятору 10 разрежения.
ся в работу и изменяет свое задание основному регулятору 8, который посредством своего исполнительного механизма 9 регулирующего органа изменяет соответственно производительность вентилятора. При этом изменяется мощность его двигателя и под воздействием сигнала от датчика 2 ком- .пенсируется изменение задания от корректирующего регулятора 6 основному регулятору 8 и, кроме того, изменяется задание регулятору 10 разрежения, которьй посредством своего исполнительного механизма 11 регулирукоторый изменяет производительност дымососа. Сигнал датчика 3 изменяе свое значение и компенсирует измен ние сигнала от датчика 2. При соот
gn ветствующем подборе статических ха рактеристик датчиков 2 и 3, задатч ка 4 и параметров настройки основн регуляторов 8 и 10 можно достичь т го, чтобы при возмущении нагрузкой
СЕ значения содержания кислорода и ра режения в топке не выходили за пре делы установленных зон нечувствите ности, В этом случае процесс регул рования протекает только во внутре
0
ющего органа изменяет производительность дымососа та;ким образом, чтобы разрежение в топке и, соответственно, сигнал от датчика 5 разрежения не изменились. Благодаря тому, что при включении APli 14 опорные сигналы датчиков 16 и 17 отключаются от АРП 14 за счет размыкания его нормально закрытых контактов, под воздействием основного регулятора 8 избыток воздуха устанавливается строго в соответствии с заданным значением, выход сумматора 13 близок к нулю, т.е. за5 данное значение кислорода находится строго в середине зоны нечувствительности, и только тогда АРП 14 отключается и своими контактами отключает сигнал корректирующего регулятора 6-и подключает к АРП 14 датчики 16 и 17. Б результате обеспеч11вается достаточно точное поддержание значения кислорода в середине заданной зоны нечувствительности, что повышает статическую точность системы авторегулирования и повышает ее качество.
Аналогично работает и регулятор разрежения, обеспечивая высокую ста0 тическую точность поддержания разрежения в топке строго в середине заданной зоны нечувствительности по разрежению. При этом уменьшается частота срабатывания исполнительного механизма 11, что дополнительно способствует повышению надежности его работы.
При изменении нагрузки котла сигнал от задатчика 4 (фиг. 1) изменяет свое значение и под его воздействием основной регулятор 8 воздуха изменяет производительность вентилятора, изменяется его мощность и под действием сигнала от датчика 2 изменяется
5
5
0
задание регулятору 10 разрежения.
который изменяет производительность дымососа. Сигнал датчика 3 изменяет свое значение и компенсирует изменение сигнала от датчика 2. При соответствующем подборе статических ха- рактеристик датчиков 2 и 3, задатчика 4 и параметров настройки основных регуляторов 8 и 10 можно достичь того, чтобы при возмущении нагрузкой
значения содержания кислорода и раз- режения в топке не выходили за пределы установленных зон нечувствительности, В этом случае процесс регулирования протекает только во внутрен-
них контурах без подключения корректирующих регуляторов, а время регулирования не превьшает 15-20 с.
Работа систем автоматического регулирования, схемы которых изображены на фиг. 2 и 3, аналогична работе системы по фиг. 1, так как их различие состоит только в аппаратурной реализации корректирующих регуляторо и соответствующем ей месте установки нормально открытых контактов АРП 14 и 15.
Нелинейный блок 12 осуществляет требуемую неравномерность по нагруз- ке на установленное значение содержания кислорода. При изменении, нагрузки регулятор воздуха поддерживает такое содержание кислорода, при котором сигнал на выходе сумматора 13 неизменен во всем диапазоне изменения нагрузок котла.
Формула изобретения
л щщ
D Ш
fpuz.l
| Система автоматического регулирования газовоздушного режима котлоагрегата | 1983 |
|
SU1176145A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
