(рие.1
Изобретение относится к водному и рыбному хозяйству, а именно к экспериментальным гидравлическим исследованиям струйных процессов.
Цель изобретения повышение точности бесконтактного контроля параметров мигрантов.
На фиг, 1 приведена схема устройства; на фиг. 2 и 3 - диаграммы хода лучей в устройствеJ на фиг. 4 - временные диаграммы работы устройства.
Устройство для определения сечения мигрантов содержит светоизлуча- ющие диоды 1, совмещающие и функции фотоприемников.
Светоизлучающие диоды размещены вокруг излучаемого объекта 2. Каждый из диодов соединен с демульти- плексором 3, через который на него от генератора А поступает сигнал модуляции, и с мультиплексором 5, выход которого через усилитель 6 по- дается на аналого-цифровой преобра- зователь 7. Коды с аналого-цифрово- го преобразователя поступают на мик- роЭВМ 8, с которой связано устройство 9 отображения информации.
В процессе работы происходит по.- очередное включение светодиодов 1, в силу чего световой луч обегает всю плоскость за период Демульти- плексор 3 поочередно подключает к каждому диоду 1 модулирующую частоту f о
Мультиплексор 5 также поочередно
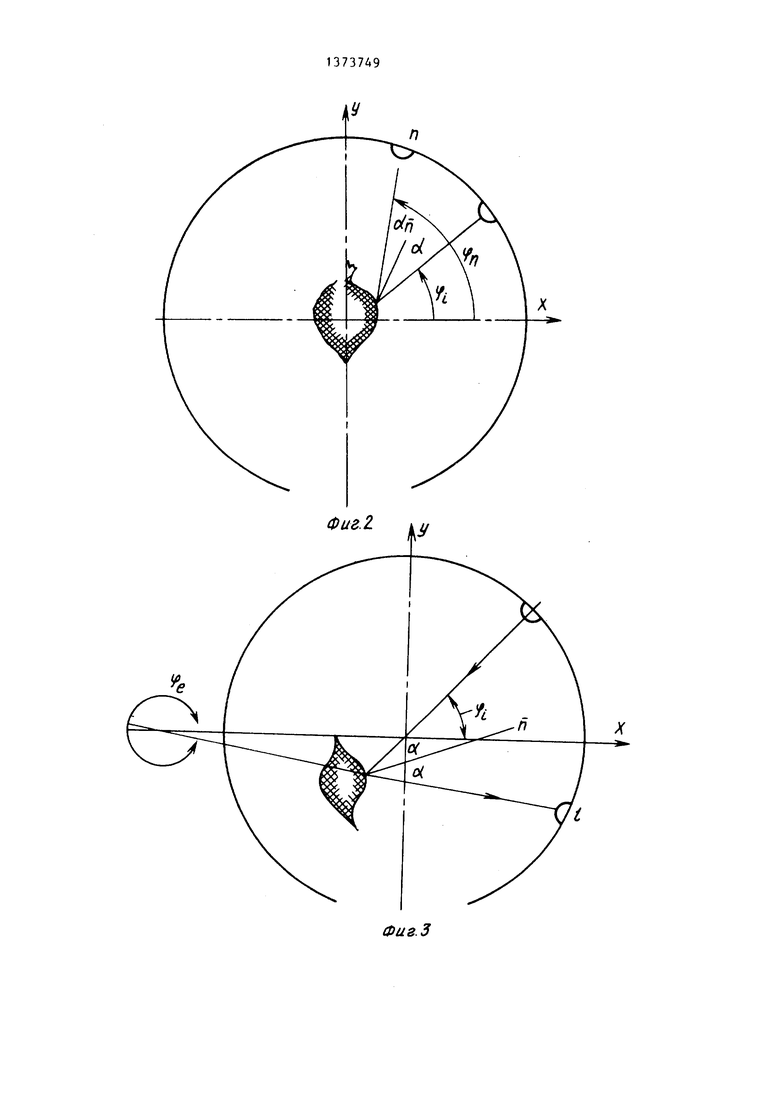
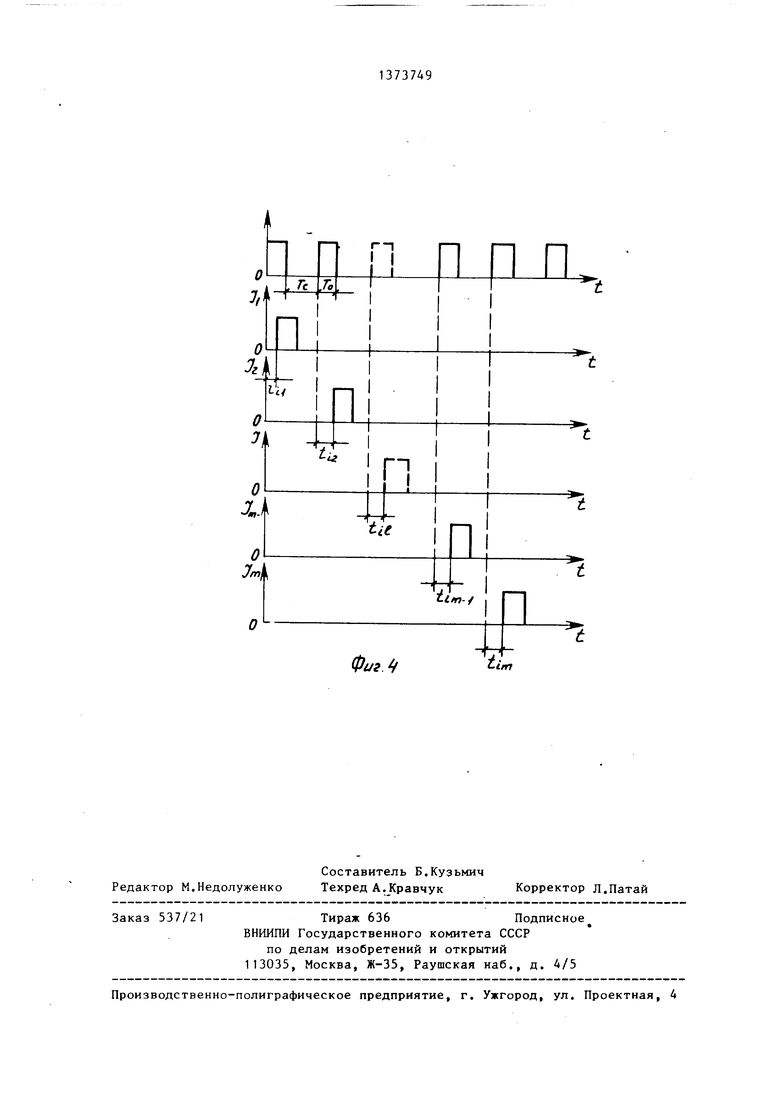
опрашивает диоды 1, которые в это время работают в режиме фотодиодов. Микроэвм 8 вьщает синхроимпульсы на мультиплексор 5 и демультиплексор 3 Демультиплексор 3 включает i-й диод в режиме излучения, а мультиплексор 5 - все остальные диоды поочередно в режиме фотоприемников. При этом i-й диод излучает промодулированный световой импульс длительностью Т (фиг. 4).
За время си гнал, излучаемый i-M диодом и принятый диодом 1-го канала, обрабатывается. Измеряются его амплитуды и время прохождения от i-ro до 1-го диода. Таким образо за время работы i-ro диода в режиме излучения он излучает га-1 световой импульс длительностью Т,, (т - общее количество светодиодов в систему). При этом поочередно опрашивается т-1 диодов и по каждому каналу фиксируется амплитуда и задержка сигна
5
О
5
лов относительно излученных импульсов. После опроса т-1 каналов i-й диод излучает эхосигнал, который воспринимается этим же диодом, но уже работающим в режиме фотодиода, измеряется его амплитуда и задержка. Затем включается i+1-й диод.
После полного обхода контура в плоскости объекта (первой) можно составить матрицу коэффициентов, равных отношению мощности сигнала принимаемого 1-м фотодиодом, обозначаемого PJ , и мощности излучения Р , i-M светодиодом.
При заданной геометрии расположения диодов эта матрица однозначно описывает форму контура сечения рыбы, причем этот контур может быть записан в память как шаблон для каждого вида рыб и микропроцессор может самостоятельно сопоставить эти данные.
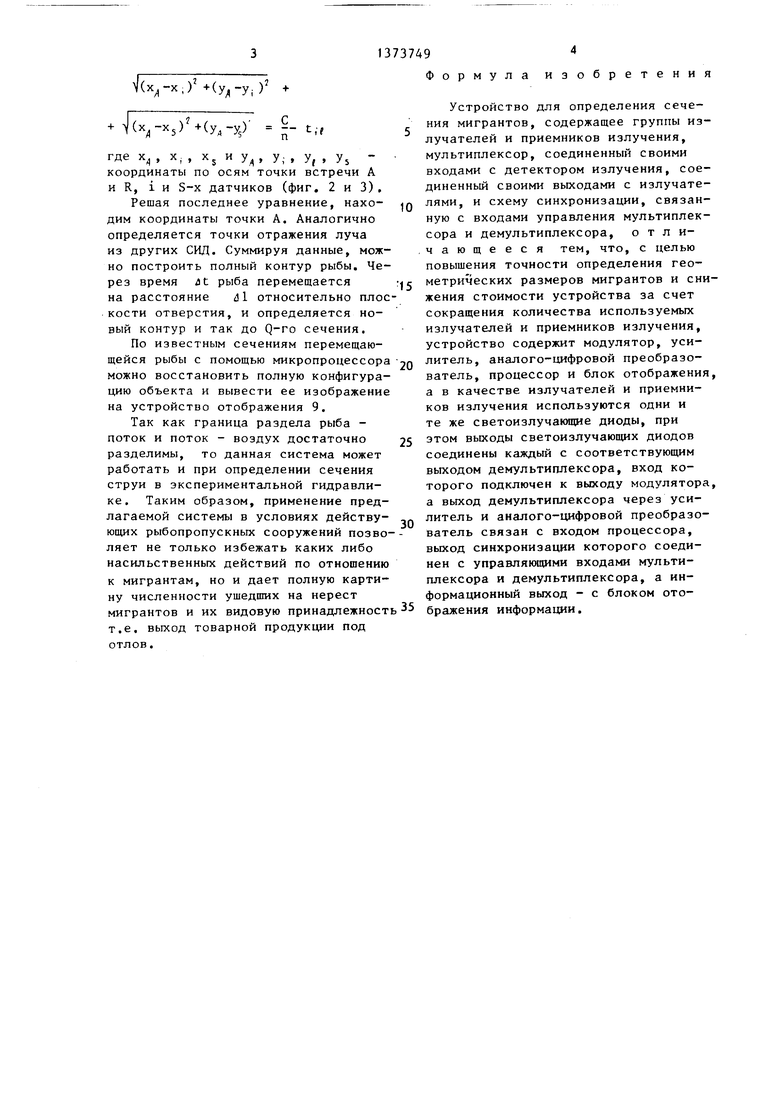
Кроме того, система позволяет вычислять и координаты смешенного относительно центра объекта (фиг. 3). Очевидно, что расстояние г 1 пройденное лучем от i-ro до 1-го диода равно 1
А( А(
а от i-ro, СИД, до S - диода г равно
г.
I S
Где г - г AI геометрические
размеры
и их можно вычислить
it Г Г -S
где С - скорость света в вакууме п - показатель преломления
воды t , t . - время прохождения луча
от i-ro до 1-го и S-ro
пи ода
Записывая полученное в координатной форме и учитывая расстояния, имеем
(х,-х,).(у,-у,) - |(х,-хе)(у,-у,) - t,,
А|(Х.-Х,)-Ь(У,-У,. )
(х,-Х5)-ь(у,-ур - t,.,
где х , Xj , Xj и у , у. , у , у - координаты по осям точки встречи А и R, i и S-X датчиков (фиг. 2 и 3),
Решая последнее уравнение, нахо- ДИМ координаты точки А, Аналогично определяется точки отражения луча из других СИД. Суммируя данные, можно построить полный контур рыбы. Через время ul рыба перемещается на расстояние 31 относительно плоскости отверстия, и определяется новый контур и так до Q-ro сечения.
По известным сечениям перемещающейся рыбы с помощью микропроцессора можно восстановить полную конфигурацию объекта и вывести ее изображение на устройство отображения 9.
Так как граница раздела рыба - поток и поток - воздух достаточно разделимы, то данная система может работать и при определении сечения струи в экспериментальной гидравлике. Таким образом, применение предлагаемой системы в условиях действующих рыбопропускных сооружений позво ляет не только избежать каких либо насильственных действий по отношению к мигрантам, но и дает полную картину численности ушедших на нерест мигрантов и их видовую принадлежност т.е. выход товарной продукции под отлов.
Q 5
n
5 5
0
Формула изобретения
Устройство для определения сечения мигрантов, содержащее группы излучателей и приемников излучения, мультиплексор, соединенный своими входами с детектором излучения, соединенный своими выходами с излучателями, и схему синхронизации, связанную с входами управления мультиплексора и демультиплексора, о т л и- ,чающееся тем, что, с целью повышения точности определения геометрических размеров мигрантов и снижения стоимости устройства за счет сокращения количества используемых излучателей и приемников излучения, устройство содержит модулятор, усилитель, аналого-цифровой преобразователь, процессор и блок отображения, а в качестве излучателей и приемников излучения используются одни и те же светоизлучающие диоды, при этом выходы светоизлучающих диодов соединены каждый с соответствующим выходом демультиплексора, вход которого подключен к выходу модулятора, а выход демультиплексора через усилитель и аналого-цифровой преобразователь связан с входом процессора, выход синхронизации которого соединен с управляющими входами мультиплексора и демультиплексора, а информационный выход - с блоком отображения информации.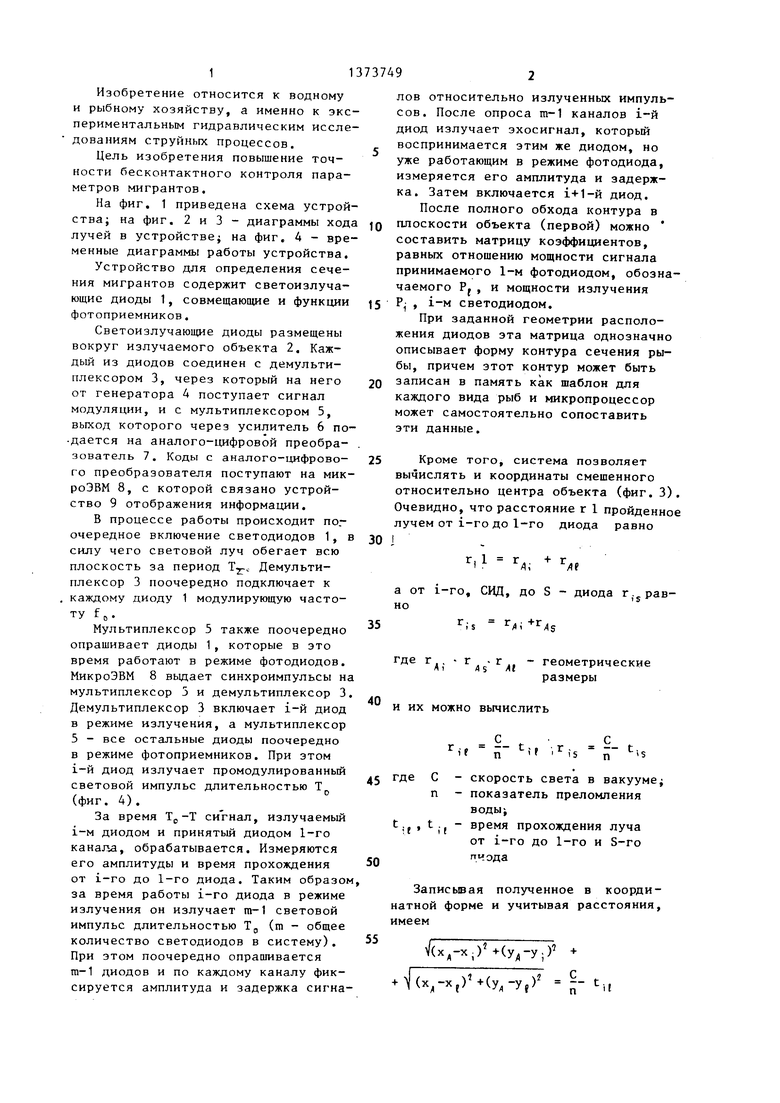
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический преобразователь для группы запоминающих устройств | 1989 |
|
SU1767534A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ЦИФРО-АНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2583738C1 |
| ПРИЕМО-ПЕРЕДАЮЩИЙ БЛОК ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2003 |
|
RU2239286C1 |
| Устройство для контроля состояния канала связи | 1987 |
|
SU1434550A1 |
| Устройство для передачи сигналов между неподвижным и вращающимся объектами | 1985 |
|
SU1259320A1 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ МНОГОЧАСТОТНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480712C2 |
| Многоканальный ассоциативный оптический коррелятор для запоминающего устройства | 1989 |
|
SU1711232A1 |
| Оптический преобразователь для запоминающих устройств | 1990 |
|
SU1709393A1 |
| ИДЕНТИФИКАТОР БУМАЖНЫХ ДЕНЕГ | 2007 |
|
RU2401458C9 |
| Цифровой оптический измеритель уровня | 1988 |
|
SU1652825A1 |
Изобретение относится к водному к рыбному хозяйству, а именно к экспериментальным гидравлическим исследованиям струйных процессов. Цель изобретения - повышение точности определения геометрических размеров мигрантов и снижение стоимости устройства. Для определения контура излучаемого объекта 2 используется принцип световой локации рядом источников по периметру отверстия. Засветка соседних светоизлучающих диодов 1 исключается подачей и приемом модулированного сигнала и раздельной его обработкой. Последовательно сканирование обеспечивается демультиплексором 3, а раздельный прием и обработка сигнала - мультиплексором 5, Усиленный в усилителе 6 сигнал поступает на аналого-цифровой преобразователь 7. Определение амплитуды и задержки эхосигналов осуществляет микроэвм. 8. 4 ил. ( (Л 00 оо 4 СО
Фиг.2. iy
Фиг.З
Фиг.
-tin
| Патент США № 4417817, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
