Ю
(Л
, «
Изобретение относится к электротехнике, в частности к реле давления
Цель изобретения - повьппение чув-г ствительнос№ и точности сгабатыва- ния, уменьшение габаритов.
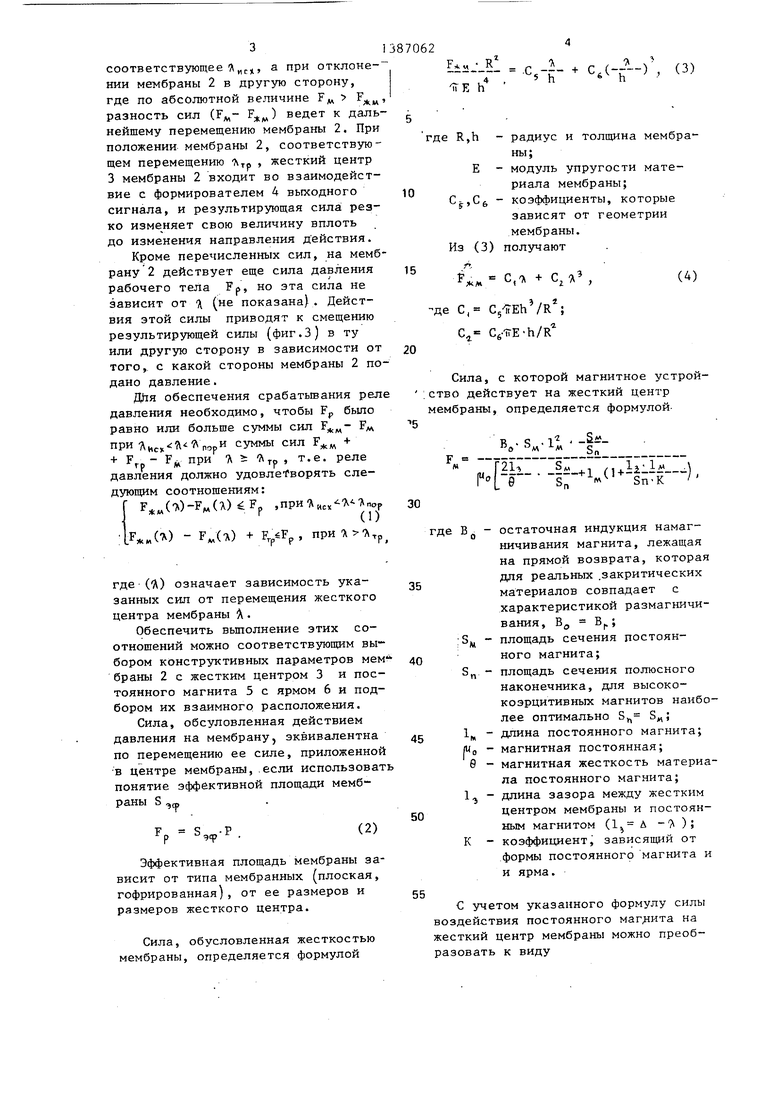
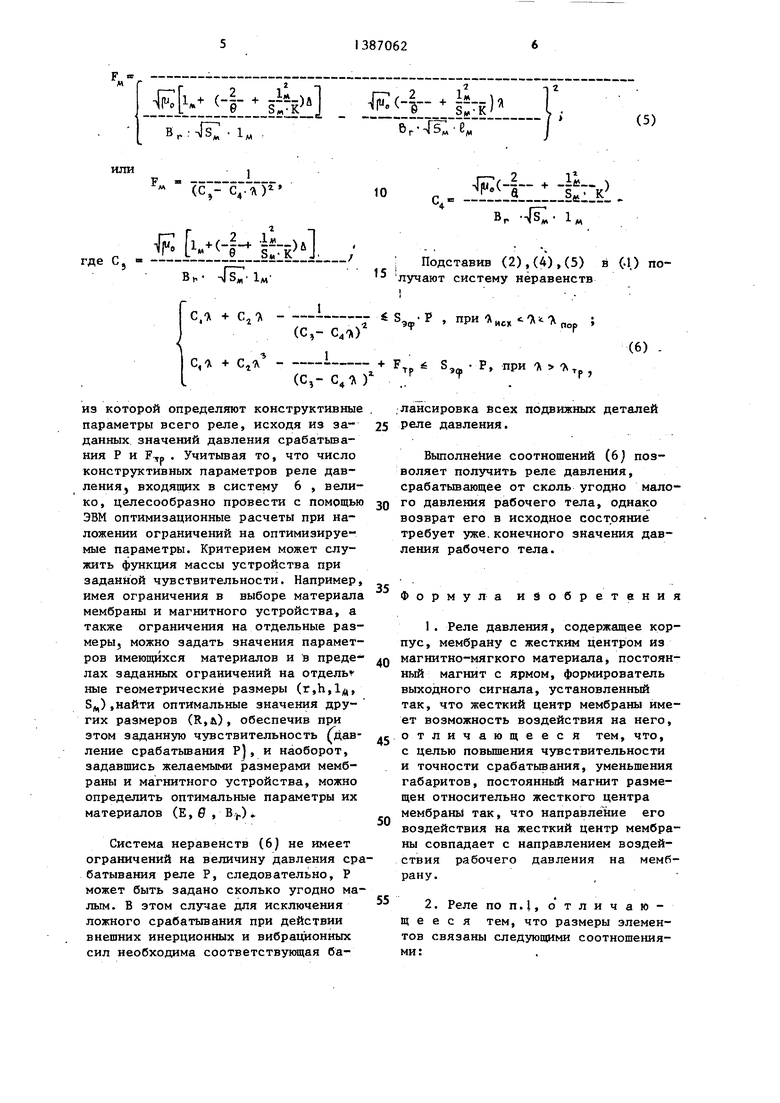
На фиг.1 изображено реле давления на фиг.2 - мембрана в разных положениях относительного постоянного магнита; на фиг.З - зависимости сил, действующих на мембрану при ее перемещении.
Реле давления (фиг.1) содержит корпус 1, мембрану 2 с жестким центром 3 из. магнитно-мягкогр материала, формирователь 4 выходного сигнала, постоянный магнит 5 и ярмо 6.
В исходном состоянии сила жесткос ти мембраны 2 равна или больше силы действия постоянного магнита 5 на же жесткий центр 3 мембраны 2, и зазор 7 между жестком центром мембраны и магнитным устройством соответству- ® чей Величина зазора 7 может рег лироваться перемещением ярма 6 в ре резьбовом отверстии корпуса 1. Этим перемещением устанавливается требуемая чувствительность реле давления. Уменьшением зазора повьшается чувствительность реле. При появлении давления в отверстии 8 в полости 9 между корпусом 1 и мембраной 2 повышается давление, которое перемещает мембрану 2 в сторону магнитного устройства 5,6. При величине давления, равного давлению срабатьюания реле, зазор 7 соответствует А„др и при дальнейшем уменьшении зазора 7 сила воздействия магнитного устройства 5, 6 на жесткий центр 3 превосходит силу упругости мембраны 2, что ведет к перемещению жесткого центра 3 в сторону магнитного устройства 5,6 уже не требуя повьшгёния давления рабочего тела, подаваемого в отверстие 8. Немагнитный шток 10, жестко связанный с жестким центром 3 мембраны 2, входит во взаимодействием с формирователем 4 и приводит к его сраба тьшанию.
Снятие давления не изменяет состояния микровыключателя до подачи давления в отверстие 11 или до перемещения мембраны в исходное состоя ние внешней силой с помощью известных приспособлений.
На фиг.2 показаны четыре положения мембраны 2 с жестким центром
3 относительно магнита 5 и ярма 6, связанных с корпусом I.
Первое (начальное) положение соответствует ненапряженному состоянию мембраны 2. В этом положении зазор между жестким центром 3 мембраны 2 и магнитным устройством 5,6 равен л .
Второе положение соответствует перемещению жесткого центра 3 мембраны 7 от начального положения на величину Л исх этом положении все силы, действующие на мембрану 2, уравновешены.
Третье положение соответствует неустойчивому равновесию сил,.которое наступает при перемещении жесткого центра 3 мембраны 2 от началь
ного положения на величину А
0
5
5
0
5
0
пор
Это
положение соответствует порогу срабатывания реле.
Четвертое прложение мембраны 2 соответствует перемещению мембраны 2 на величину Лтп. когда резко возрастает действие на мембрану 2 со стороны формирователя 4 выходного сигнала, препятствующее перемещению мембраны 2. При дальнейшем перемещении мембраны 2 после надежного сра- 0 батывания формирователя 4 выходного сигнала жесткий центр 3 мембраны 2 . ложится на упор.
Силы, (фиг.З), действующие на мембрану, имеют следующие обозначения: Fj - сила, обусловленная жесткостью мембраны 2; F, - сила, с которой магнитное устройство 5,6 действует на жесткий центр 3 мембраны 2; FT- - сумма сил трения и упругих сил формирователя 4 выходного сигнала.
Все эти силы зависят от перемещения 7 жесткого центра 3 мембраны, причем F в двух положениях жесткого центра 3, соответствующих перемещениям его от начального положения на величины „ и Л „;.,„ .
Положение мембраны, соответствующее перемещению ее Жесткого центра на величину Л и с X является устойчивым, так как любое незначительное перемещение жесткого центра 3 приводит к появлению сил, возвращающих его в исходное положение. Положение мембраны 2, соответствующее перемещению (,., , неустойчиво, так как при малейшем отклонении мембраны 2 в сторону, где по абсолютной величине F, 1 разность сил ( F)
жил - (1Л
возвращает мембрану 2
жм положение.
соответствующее А „р, а при отклонеНИИ мембраны 2 в другую сторону, где по абсолютной величине F Г.„ разность сил (F,- F.) ведет к дальнейшему перемещению мембраны 2. При положении мембраны 2, соответствующем перемещению жесткий центр 3 мембраны 2 входит во взаимодействие с формирователем 4 выходного сигнала, и результирующая сила резко изменяет свою величину вплоть до изменения направления Действия.
Кроме перечисленных сил, на мембрану 2 действует еще сила давления рабочего тела Fp, но эта сила не зависит от не показана). Действия этой силы приводят к смещению результирующей силы (фиг.З) в ту или другую сторону в зависимости от того, с какой стороны мембраны 2 подано давление.
ДЬя обеспечения срабатывания реле давления необходимо, чтобы Fp бьшс равно или больше суммы сил F при .,pH суммы сил , « + - Fj при А i -Лтр , т.е. реле давления должно удовле-Гворять следующим соотношениям:
F()-F(A)Fp ,при А„,,
.) - ) + F,piFp, ,р
где (А) означает зависимость указанных сил от перемещения жесткого центра мембраны А.
Обеспечить вьтолнение этих соотношений можно соответствующим вы бором конструктивных параметров мем браны 2 с жестким центром 3 и постоянного магнита 5 с ярмом 6 и подбором их взаимного расположения.
Сила, обсулозленная действием давления на мембрану, эквивалентна по перемещению ее силе, приложенной в центре мембраны,.если использовать понятие эффективной площади мембраны S ,
F Ч Р Р
Эффективная площадь мембраны зависит от типа мембранных (плоская, гофрированная), от ее размеров и размеров жесткого центра.
Сила, обусловленная жесткостью мембраны, определяется формулой
R
-иЕ h
С h
п
c.(-f-) .,
(3)
где R,h - радиус и толщина мембраны;
Е - модуль упругости материала мембраны; CjjC - коэффициенты, которые зависят от геометрии мембраны. Из (3) получают
- С, -н С,%(4)
-де С, Cj-ITEh /R ; С, Cft-irE h/R
20
Сила, с которой магнитное устрой- :ство действует на жесткий центр мембраны, определяется формулой 5
В . о , 1 г , iJ о /л s
-; i|r:-s::r(;:ii:i.:::,,
30
35
где БД- остаточная индукция намагничивания магнита, лежащая на прямой возврата, которая для реальных .закритических материалов совпадает с характеристикой размагничивания, Вд :S - площадь сечения постоян- 40 ного магнита;
5„ - площадь сечения полюсного наконечника, для высококоэрцитивных магнитов наиболее оптимально S,
1„ - длина постоянного магнита;
/UQ - магнитная постоянная; б - магнитная жесткость материала постоянного магнита;
1, - длина зазора между жестким центром мембраны и постоянным магнитом ( );
К - коэффициент, зависящий от
формы постоянного магнита и и ярма.
45
50
55
С учетом указанного формулу силы воздействия постоянного магдита на жесткий центр мембраны можно преобразовать к виду
или
(С,- с,.)
11.
10
(-г- -Ь-)
Sfi. к 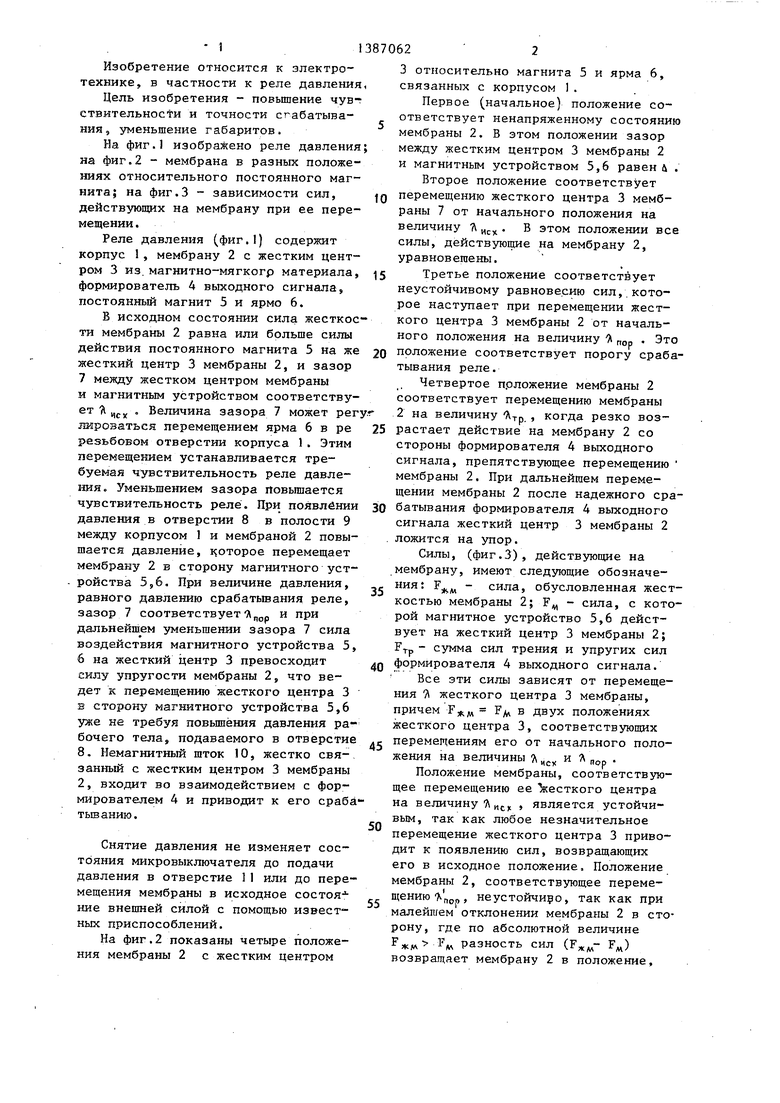
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 1997 |
|
RU2122177C1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДИСКРЕТНЫХ СИГНАЛОВ | 1968 |
|
SU220770A1 |
| РЕЛЕ ДАВЛЕНИЯ | 2000 |
|
RU2169913C1 |
| РЕЛЕ РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2141632C1 |
| ВАКУУМНОЕ РЕЛЕ | 2013 |
|
RU2560128C2 |
| Устройство для стабилизации давления | 1983 |
|
SU1211706A1 |
| МЕМБРАННЫЙ КОМПРЕССОР | 1996 |
|
RU2121078C1 |
| Реле давления | 1984 |
|
SU1190218A1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| Реле давления | 1982 |
|
SU1075323A1 |
Изобретение относится к электротехнике , в частности к реле давления. Цель изобретения - повьппение чувствительности и точности срабатывания, уменьшение габаритов. При подаче давления в полость 9 мембрана 2 прогибается и при достижении определенного положения жесткий центр 3 скачком притягивается к постоянному магниту 5 с ярмом 6, вьщавая срабатывание формирователя выходного сигнала. 4. 1 з.п. ф-лы, 3 ил.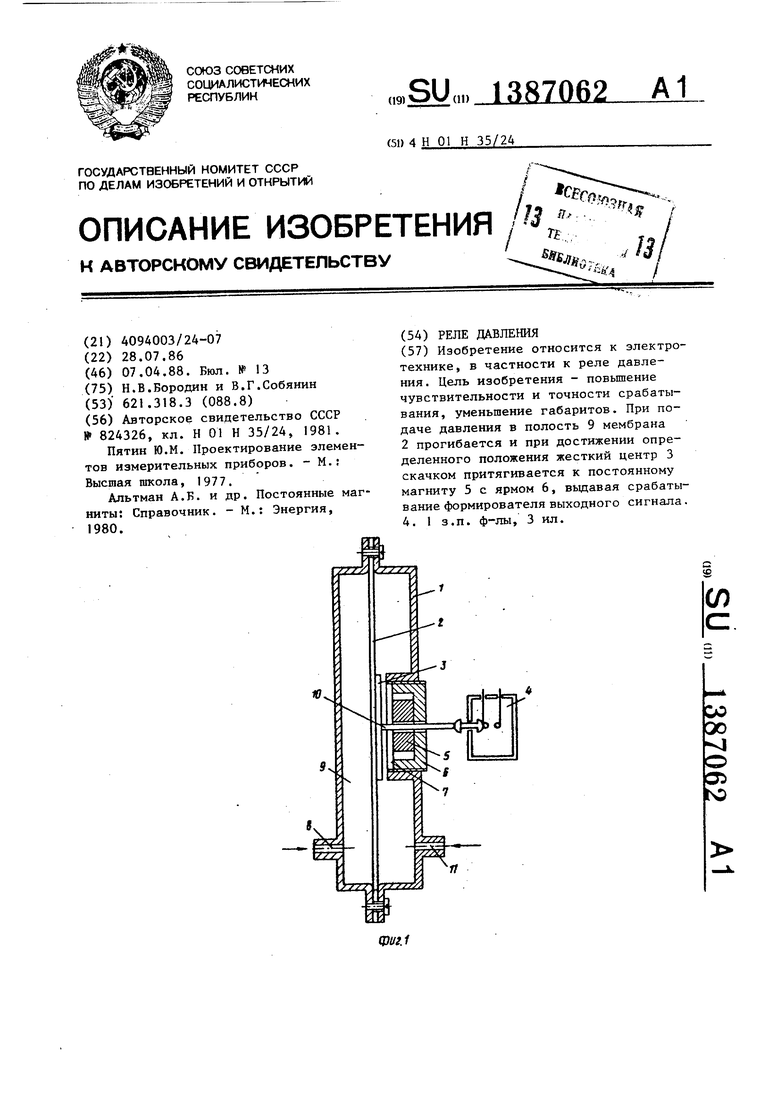
где С,
:Р1.±1г--й:И..../
В), IM
15 i
I
С, - Ч- при А.с Х.т, , С,-х + С,Л - --.-i-.™ F; S,. Р. при .p,
из которой определяют конструктивные параметры всего реле, исходя из заданных значений давления срабатьюа- ния Р и . Учитывая то, что число конструктивных параметров реле давления, входящих в систему 6 , велико, целесообразно провести с помощью ЭВМ оптимизационные расчеты при наложении ограничений на оптимизируе мые параметры. Критерием может служить функция массы устройства при заданной чувствительности. Например, имея ограничения в выборе материала мембраны и магнитного устройства, а также ограничения на отдельные размеры, можно задать значения параметров имеющихся материалов и в преде лах заданных ограничений на отдель - ные геометрические размеры (r,h,l|(j, S),найти оптимальные значения дру- гих размеров (R,&), обеспечив при этом заданную чувствительность (Давление срабатьшания Р), и наоборот, задавшись желаемыми размерами мембраны и магнитного устройства, можно определить оптимальные параметры их материалов (Е, 0 , Bj.)
Система неравенств (6) не имеет ограничений на величину давления срабатывания реле Р, следовательно, Р может быть задано сколько угодно малым. В этом случае для исключения ложного срабатывания при действии внешних инерционных и вибрационных сил необходима соответствующая баВг . 1„ Подставив (2), (4), (5) в (Л.) получают систему неравенств
(6) .
.лансировка Всех подвижных деталей 25 реле давления.
Вьшолнейие соотношений (6) позволяет получить реле давления, срабатывающее от сколь угодно малого давления рабочего тела, однако возврат его в исходное состояние требует уже.конечного значения давления рабочего тела.
Формула изобретения
с целью повышения чувствительности и точности срабатывания, уменьшения габаритов, постоянный магнит размещен относительно жесткого центра мембраны так, что направление его воздействия на жесткий центр мембраны совпадает с направлением воздействия рабочего давления на мембрану.
С, -ь C.j X 1387062
(С,- C,7lf
СЛ + С. л
где С;,С,С,С - коэффициенты, не зависящие от перемещения жесткого центра мембраны,
С, С; IT Е hVR% С С ITE H/R ;
„ i«(
(С,
B,S 1дл
1м
. - Т
В T|S IM
jjCj - коэффициенты, зависящие
от геометрии мембраны; Е - модуль упругости материа- 30 А|,с, пор
ла мембраны;
h - толщина мембраны; R - радиус мембраны; ро - магнитная постоянная; 1 - длина магнита магнитного 5
устройства; S - площадь сечения магнита
и ярма магнитного устрой- Р .ства;
Лтр
Ч-S, Р
при 9 „с, i Л пор
Ч
S, Р при 71 1V ,р ,
Д ) 0
5
0
5
б Л в.
0 А|,с, пор
5
Р
Лтр
Чмагнитная жесткость материала магнита; коэффициент, зависящий от формы постоянного магнита и ярма;
максимальный зазор между жестким центром мембраны и магнитным устройством При ненапряженном состоянии мембраны; остаточная индукция намагничивания постоянного магнита;
перемещение жесткого центра мембраны, отсчитываемое от ненапряженного состояния мембраны; сумма сил трения и упругих сил устройства формирования выходного сигнала;
перемещение мембраны,соответствующее исходному состоянию, порогу срабатывания и скачку сил соответственно; эффективная площадь мембраны;
давление срабатьюания реле.
////////
iiei АпорЧц глр
Лися.
0utZ
А
F)n,M.fmp- ffi
Фиг.З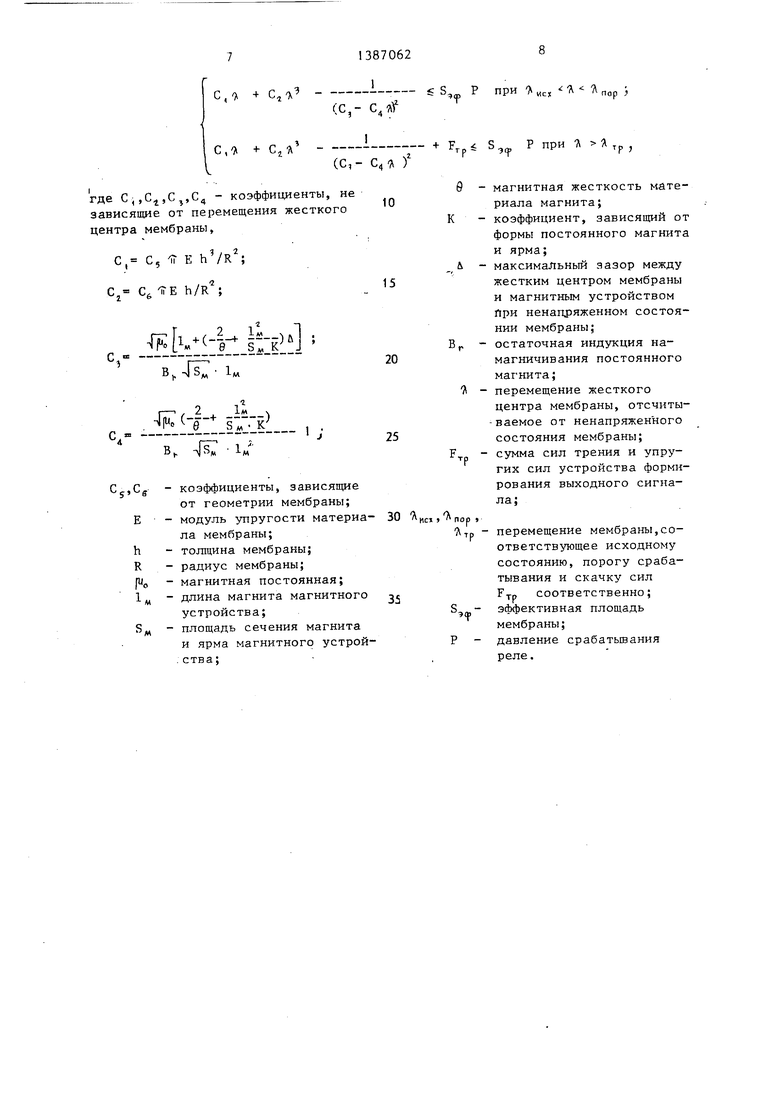
| Реле давления | 1979 |
|
SU824326A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пятин Ю.М | |||
| Проектирование элементов измерительных приборов | |||
| - М.: Высшая школа, 1977 | |||
| Альтман А.Б | |||
| и др | |||
| Постоянные магниты: Справочник | |||
| - М.: Энергия, 1980. | |||
