для постоянных магнитов) герметичные контакты 8.
Каждой паре герметичных контактов 8, располагаемых на одном радиусе торцовой 5 поверхности статора (по одну сторону от оси вала 4), соответствует по одному электромагниту 2, установленному на цилиндрической поверхности статора 1 (фиг. 1 и 2). Постоянные магниты 7 и контакты 8, яв- ормально-разомкнут двух параллельных
Величина зазора между ними выбрана таким образом, чтобы обеспечить воздействие постоянных магнитов на герметичные контакты. Постоянные магниты располагаются по
Изобретение относится к электромашиностроению и может быть использовано в быстродействующем автоматизированном электроприводе.
Целью изобретения является упрощение конструкции и повышение выходной мощности.
На фиг. 1 представлен электродвигатель, продольный разрез; на фиг. 2 - разрез А-А
на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1;ляющиеся нормально-разомкнутыми, распона фиг. 4 схема действия сил на ротор Ю агаются в двух параллельных плоскостях. двигателя; на фиг. 5 - электродвигатель, вариант исполнения, продольный разрез; на фиг. 6 - то же, поперечный разрез; на фиг. 7 - схема действия сил на ротор двигателя; на фиг. 8 и 9 - электродвигатели, дуге окружности.и перекрывают по крайней варианты исполнения, продольный разрезмере по два герметичных контакта с каждой
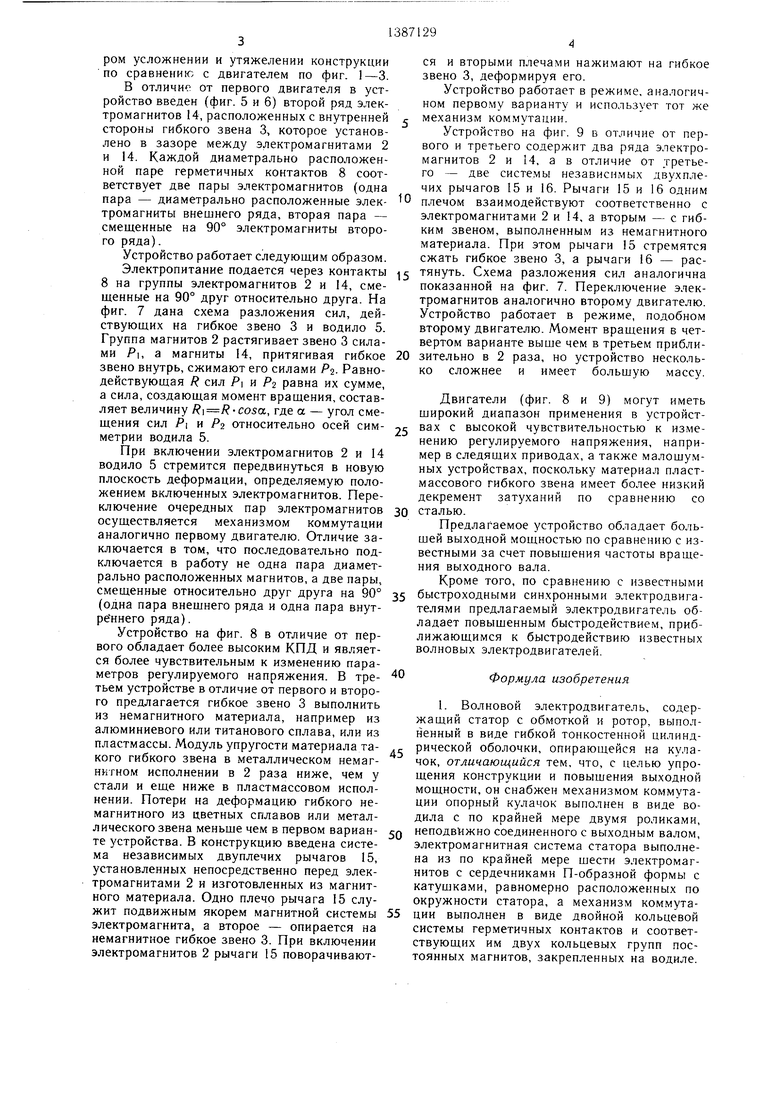
стороны вала 4. Таким образом, часть герметичных контактов, находящихся напротив постоянных магнитов 7, оказывается замкнутой.
Устройство работает следующим образом. При подаче электропитания на контакты 8 (например, внутреннего ряда) в работу включаются только те электромагниты 2, которые связаны с замкнутыми кон- 4, водило 5 с роликами 6, механизм ком- 25 тактами.
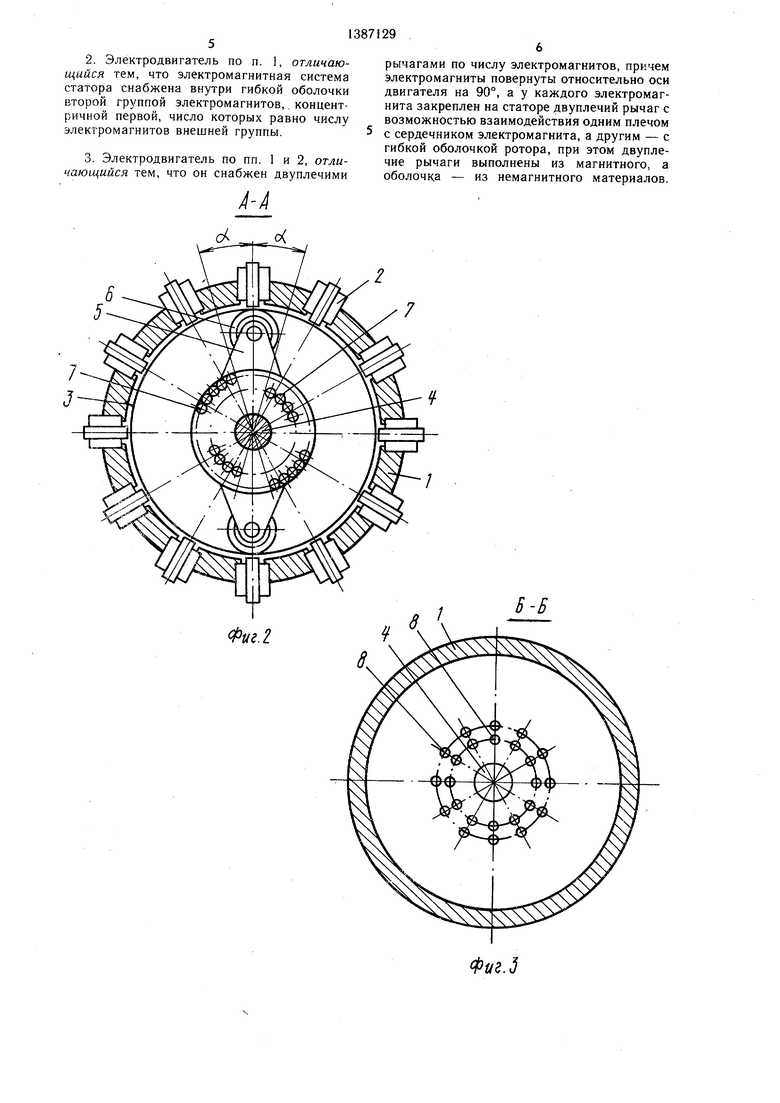
мутации электромагнитной системы, содер-Электромагниты 2, притягивая гибкое звено 3, перемещают исходную плоскость деформации, определяемую положением водила 5. Возникает составляющая сил притяжения гибкого звена 3 электромагнитами 2, возможностью взаимодействия с постоянны- зо направленная перпендикулярно оси симмет- ми магнитами.рии водила 5, происходит разворот водила и с
Электромагниты 2, закрепленные непод- ним выходного вала. Схема разложения сил вижно на статоре, располагаются равно- представлена на фиг. 4. Ролики 6 обкаты- мерно вокруг гибкого звена 3. Гибкое звено ваются по гибкому звену. установлено на роликах б с натягом, близ-Как только водило 5 повернется на угол,
КИМ по величине зазору между электромаг- 35 равный углу между соседними контактами 8, нитами 2 и гибким звеном 3. Ролики б за- постоянные магниты 7 переместятся вместе креплены на водиле 5 посредство.м щарико- с водилом 5. При этом замкнется одна па- подшипников 9 с осями 10. Водило 5 непод- ра диаметрально расположенных контактов 8 вижно закреплено на выходном валу 4, а вал внутреннего ряда, а одна пара разомкнется. 4 на шарикоподшипниках il и 12 установ- Одновременно с этим включается очередная леи в статоре с крышкой 13 статора. по ходу вращения водила 5 пара электроЭлектродвигатель (фиг. 1) содержит статор 1, электромагнитную систему, состоя- Н1ую из отдельных электромагнитов 2, закрепленных неподвижно на цилиндрическом статоре 1 и равномерно расположенных по 20 окружности его внутренней полости с возможностью воздействия на гибкое звено 3, выполненное из магнитного материала; электродвигатель также содержит выходной вал
жащий постоянные магниты 7, установленные на водиле 5, и чувствительные к магнитному полю герметичные контакты 8, установленные на внутреннем торце статора 1 с
На водиле 5 закреплены расположенные ка двух концентрических окружностях две группы постоянных магнитов 7 (фиг. 2), установленных в ряд по дуге. Каждая группа, состоящая, например, из магнитов, со- д де:ржит соответственно по 4-5 магнитов с диаметрально противоположных сторон вала 4. Обе группы постоянных магнитов смещены относительно один другого на угол 90°. Первая группа магнитов располагается на
магнитов 2 и одна пара - отключится и т. д. Будет происходить непрерывное вращение водила 5.
При отключении электропитания происходит остановка выходного вала, а при включении на реверс необходимо подать электропитание на группу герметичных контактов 8 внещнего ряда. Аналогично происходит обратное вращение водила 5 и, соот- внутренней окружности, вторая - на внеш- 50 ветственно, вала 4.
ней. Первая группа магнитов смеплена от-Количество электромагнитов может быть
носительно оси симметрии водила 5 на неко-равным шести и более. Вместо герметичторый угол, равный а по часовой стрелке ных контактов могут быть использованы маг- (Е-.право), а вторая группа - на угол а про-нитодиоды, позволяющие обеспечить миниатив часовой стрелки (влево).тюрное исполнение механизма коммутации
На внутренней торцовой поверхности ста- 55 электромагнитов, тора 1 (фиг. 3) расположены равномерно по двум концентрическим окружностям (окружностям того же размера, что и
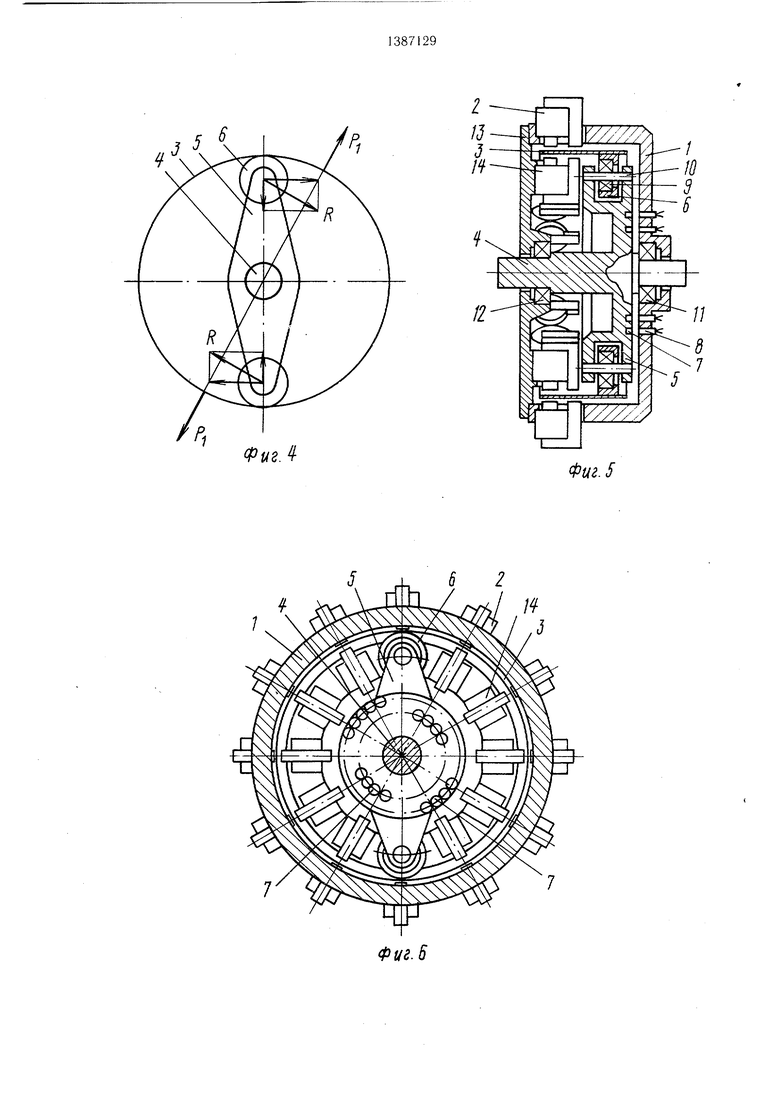
Устройство по фиг. 5 и б позволяет получить приблизительно в 2 раза больше значения момента вращения, но при некотодля постоянных магнитов) герметичные контакты 8.
Каждой паре герметичных контактов 8, располагаемых на одном радиусе торцовой поверхности статора (по одну сторону от оси вала 4), соответствует по одному электромагниту 2, установленному на цилиндрической поверхности статора 1 (фиг. 1 и 2). Постоянные магниты 7 и контакты 8, яв- ормально-разомкнут двух параллельных
Величина зазора между ними выбрана таким образом, чтобы обеспечить воздействие постоянных магнитов на герметичные контакты. Постоянные магниты располагаются по
ляющиеся нормально-разомкнутыми, распо агаются в двух параллельных плоскостях. дуге окружности.и перекрывают по крайней мере по два герметичных контакта с каждой
равный углу между соседними контактами 8, постоянные магниты 7 переместятся вместе с водилом 5. При этом замкнется одна па- ра диаметрально расположенных контактов 8 внутреннего ряда, а одна пара разомкнется. Одновременно с этим включается очередная по ходу вращения водила 5 пара электромагнитов 2 и одна пара - отключится и т. д. Будет происходить непрерывное вращение водила 5.
электромагнитов,
Устройство по фиг. 5 и б позволяет получить приблизительно в 2 раза больше значения момента вращения, но при некото
ром усложнении и утяжелении конструкции по сравнению с двигателем по фиг. 1-3.
В отличие от первого двигателя в устройство введен (фиг. 5 и 6) второй ряд электромагнитов 14, расположенных с внутренней стороны гибкого звена 3, которое установлено в зазоре между электромагнитами 2 и 14. Каждой диаметрально расположенной паре герметичных контактов 8 соответствует две пары электромагнитов (одна пара - диаметрально расположенные элек- тромагниты внешнего ряда, вторая пара - смещенные на 90° электромагниты второго ряда).
Устройство работает следующим образом.
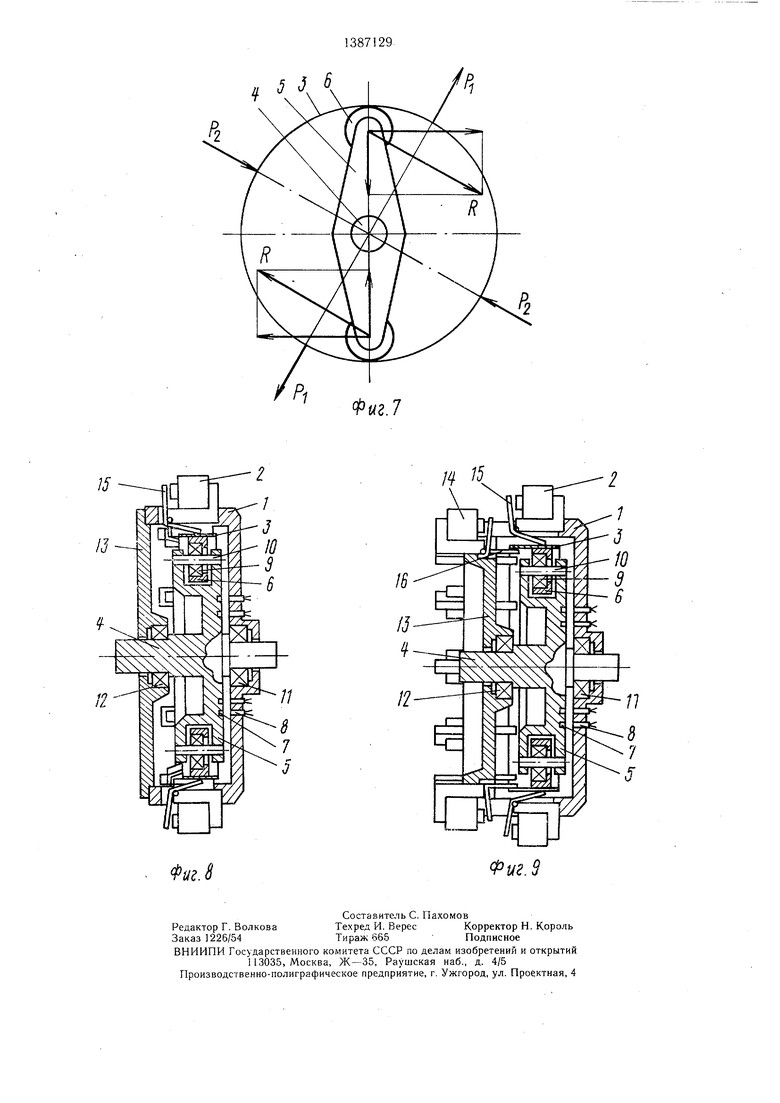
Электропитание подается через контакты 8 на группы электромагнитов 2 и 14, смещенные на 90° друг относительно друга. На фиг. 7 дана схема разложения сил, действующих на гибкое звено 3 и водило 5. Группа магнитов 2 растягивает звено 3 силами Р, а магниты 14, притягивая гибкое звено внутрь, сжимают его силами Р. Равнодействующая R сил Р и Р2 равна их сумме, а сила, создающая момер1т вращения, составляет величину R R-cosa, где а - угол смещения сил PI и Рг относительно осей симметрии водила 5.
При включении электромагнитов 2 и 14 водило 5 стремится передвинуться в новую плоскость деформации, определяемую положением включенных электромагнитов. Переключение очередных пар электромагнитов осуществляется механизмом коммутации аналогично первому двигателю. Отличие заключается в том, что последовательно подключается в работу не одна пара диаметрально расположенных магнитов, а две пары, смещенные относительно друг друга на 90° (одна пара внещнего ряда и одна пара внут- ре ннего ряда).
Устройство на фиг. 8 в отличие от первого обладает более высоким КПД и является более чувствительным к изменению параметров регулируемого напряжения. В тре- тьем устройстве в отличие от первого и второго предлагается гибкое звено 3 выполнить из немагнитного материала, например из алюминиевого или титанового сплава, или из пластмассы. Модуль упругости материала такого гибкого звена в металлическом немагнитном исполнении в 2 раза ниже, чем у стали и еще ниже в пластмассовом исполнении. Потери на деформацию гибкого немагнитного из цветных сплавов или металлического звена меньще чем в первом вариан- те устройства. В конструкцию введена система независимых двуплечих рычагов 15, установленных непосредственно перед электромагнитами 2 и изготовленных из магнитного материала. Одно плечо рычага 15 служит подвижным якорем магнитной системы электромагнита, а второе - опирается на немагнитное гибкое звено 3. При включении электромагнитов 2 рычаги 15 поворачивают5
0
О 5
ся и вторыми плечами нажимают на гибкое звено 3, деформируя его.
Устройство работает в режиме, аналогичном первому варианту и использует тот же механизм коммутации.
Устройство на фиг. 9 в отличие от первого и третьего содержит два ряда электромагнитов 2 и 14, а в отличие от третьего - две системы независимых двухпле- чих рычагов 15 и 16. Рычаги 15 и 16 одним плечом взаимодействуют соответственно с электромагнитами 2 и 14, а вторым - с гибким звеном, выполненным из немагнитного материала. При этом рычаги 15 стремятся сжать гибкое звено 3, а рычаги 16 - растянуть. Схема разложения сил аналогична показанной на фиг. 7. Переключение электромагнитов аналогично второму двигателю. Устройство работает в режиме, подобном второму двигателю. Момент вращения в четвертом варианте выше чем в третьем приблизительно в 2 раза, но устройство несколько сложнее и имеет большую массу.
Двигатели (фиг. 8 и 9) могут иметь щирокий диапазон применения в устройствах с высокой чувствительностью к изменению регулируемого напряжения, например в следящих приводах, а также малощум- ных устройствах, поскольку материал пластмассового гибкого звена имеет более низкий декремент затуханий по сравнению со сталью.
Предлагаемое устройство обладает боль- щей выходной мощностью по сравнению с известными за счет повышения частоты вращения выходного вала.
Кроме того, по сравнению с известными быстроходными синхронными электродвигателями предлагаемый электродвигатель обладает повышенным быстродействием, приближающимся к быстродействию известных волновых электродвигателей.
Формула изобретения
1. Волновой электродвигатель, содержащий статор с обмоткой и ротор, выполненный в виде гибкой тонкостенной цилиндрической оболочки, опирающейся на кулачок, отличающийся тем, что, с целью упрощения конструкции и повышения выходной мощности, он снабжен механизмом коммутации опорный кулачок выполнен в виде водила с по крайней мере двумя роликами, неподв11жно соединенного с выходным валом, электромагнитная система статора выполнена из по крайней мере шести электромагнитов с сердечниками П-образной формы с катущками, равномерно расположенных по окружности статора, а механизм коммутации выполнен в виде двойной кольцевой системы герметичных контактов и соответствующих им двух кольцевых групп постоянных магнитов, закрепленных на водиле.
2.Электродвигатель по п. 1, отличающийся тем, что электромагнитная система статора снабжена внутри гибкой оболочки второй группой электромагнитов,, концентричной первой, число которых равно числу электромагнитов внешней группы.
3.Электродвигатель по пп. 1 и 2, отличающийся тем, что он снабжен двуплечими
рычагами по числу электромагнитов, причем электромагниты повернуты относительно оси двигателя на 90°, а у каждого электромагнита закреплен на статоре двуплечий рычаг с возможностью взаимодействия одним плечом с сердечником электромагнита, а другим - с гибкой оболочкой ротора, при этом двуплечие рычаги выполнены из магнитного, а оболочка - из немагнитного материалов.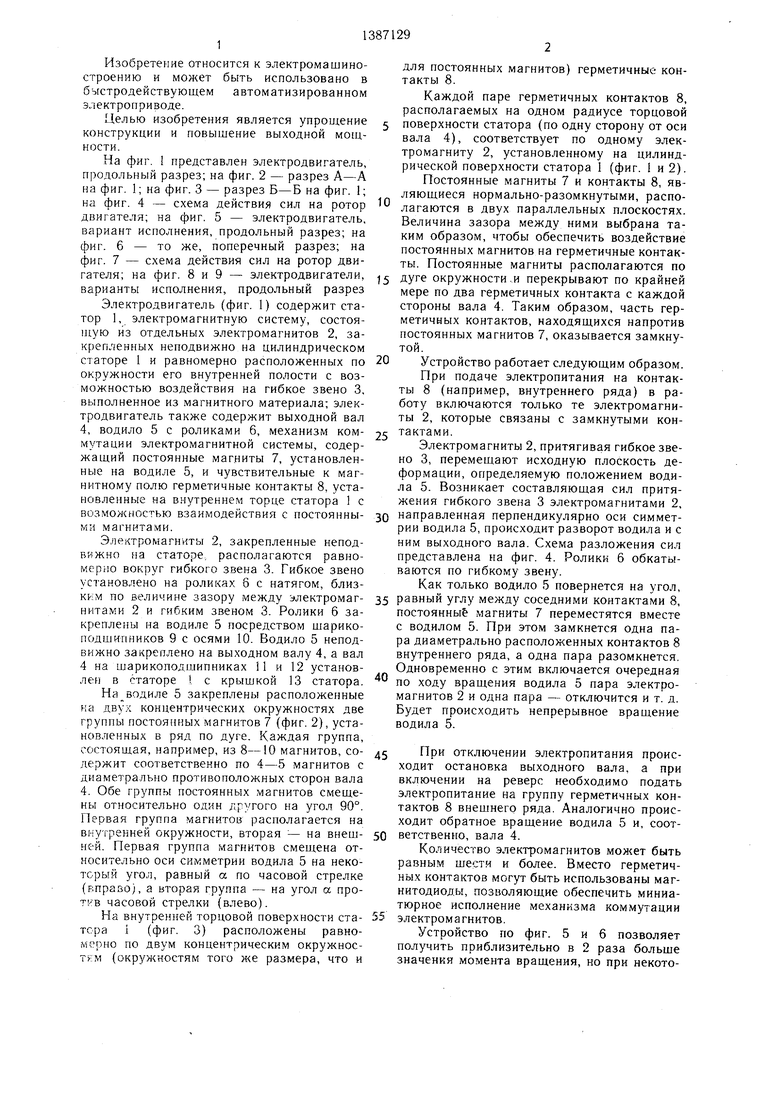
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВНУТРЕННИМ СТАТОРОМ | 2005 |
|
RU2292107C2 |
| Электродвигатель | 1984 |
|
SU1321382A3 |
| Компрессор на основе линейного двигателя | 2022 |
|
RU2792183C1 |
| ОСЕВОЙ ГЕРМЕТИЧНЫЙ ТОПЛИВОПЕРЕКАЧИВАЮЩИЙ АГРЕГАТ | 2022 |
|
RU2791799C1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР С ИЗМЕНЯЮЩИМСЯ ЭКСЦЕНТРИСИТЕТОМ ВРАЩЕНИЯ САТЕЛЛИТ-ЯКОРЯ | 2007 |
|
RU2352047C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2506689C2 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
| СПОСОБ ЗАЩИТЫ ОТ ВОЗГОРАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ КОЛЛЕКТОРНОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2567230C1 |
Изобретение относится к электротехнике и может быть использовано в быстродействующем электроприводе. Цель состоит в упрощении конструкции и повышении выходной мощности. Двигатель содержит статор с электромагнитной системой в виде кольцевой системы отдельных электромагнитов 2. Внутри статора 1 установлены гибкое звено 3 из магнитного материала и выходной вал 4, с которым соединено водило 5 с роликами 6. На водиле 5 закреплены две группы постоянных магнитов 7. а на статоре 1 размещены две группы герметичных контактов 8. При срабатывании диаметрально противоположных электромагнитов 2. смещенных относительно оси симметрии водила 5,возникают составляющие усилия, обеспечивающие смещение плоскости деформации гибкого звена 3, воздействующего на ролики 6,которые передают вращение на выходной вал 4. Постоянные магниты 7 н герметичные контакты 8 осуществляют последовательную коммутацию электромагнитов. 2 з.п. ф-лы, 9 ил. /7 S (Л СА:) оо ю со 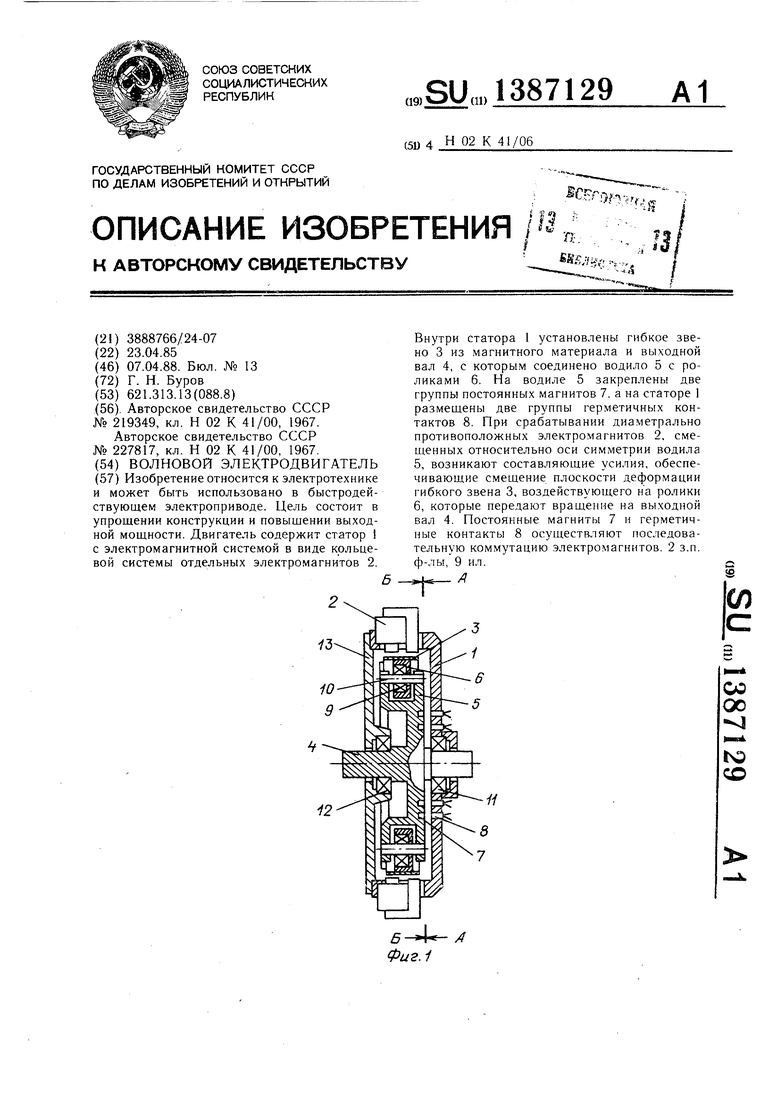
/ d о(
Фш.2
7
Фиг.
Фиг. 5
П
Фиг. 5
(риг.7
| ВОЛНОВАЯ ПЕРЕДАЧА | 0 |
|
SU219349A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 227817, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
