2178 ,,/
Изобретение относится к контрольно-измерительной технике и может быт использовано для аттестации позици- онно-чувствительных фотоприемников.
Цель изобретения - повышение точности аттестации позиционно-чувстви- тельных фотрприемников за счет трансформации перемещений каретки с отклоняющей оптической системой в перемещения зондирующего оптического изображения.
На фиг. 1 изображена структурная схема компаратора линейных перемещений; на фиг. 2 - оптическая схема компаратора линейных перемещений.
Компаратор линейных перемещений содержит основание 1 с направляющей 2, осветитель 3, состоящий из источника 4 света, диафрагмы 5 и объ ектива 6, .установленный на основании 1 так, что его оптическая ось параллельна направляющей 2, каретку 7, установленную на направляющей 2 с возможностью перемещения по ней и снаб- женную двумя стойками 8, на которых жестко закреплены два зеркала 9 и блок 10 крепления фотоприемника, предназначенную для установки аттестуемого фотоприемника 17, блок 11 об работки сигналов, вход которого предназначен для подключения к нему выхода аттестуемого фотоприемника, электропривод 12, кинематически связанный с кареткой 7 и предназначенный для ее перемещения, формирователь 13 сигналов образцовой меры длины, состоящий из ждущего перестраиваемого генератора 14 импульсов стабилизированной частоты и датчика 15 скорости перемещения каретки 7, выходом соединенного со входом 1 генератора 14, а входом Связанного с кареткой 7, и блок 16 управления, вход I которого соединен с выходом генератора 14, вход II - с выходом блока 11 обработки сигналов, выходы I и II соединены с соответствующими входами электропривода 12, а III и IV - соответственно с входами II и ГЦ генератора 14.
Зеркала 9 устанавливают на каретке 7 по ходу светового луча, создаваемого осветителем 3, так,.чтобы они образовывали отклоняющую оптическую систему, а блок 10 крепления фотоприемника размещают на каретке 7 так, чтобы при установке на него аттестуемого фотоприенника 17 его фо
точувствительная поверхность была ориентирована перпендикулярно оптической оси осветителя 3 и отстояла от главной плоскости объектива 6 на расстояние, равное
а -f (1+v) -1 (sin2c(+sih26) - (1+v)-d sin26,
(1)
a центр фоточувствительной поверхности был смещен относительно оптической оси объектива 6 на величину, равную
{1+v)-d3(l-cos26)-, -I(cos2ot.-cos26) ,
(2)
где f - фокусное расстояние осветительного объектива 6; V - линейное увеличение освети тельного объектива 6; 1 - расстояние между следами пересечения оптической оси объектива 6 с зеркалами 9; с1 - угол между оптической осью объектива 6 и плоскостью первого по ходу лучей из зеркал 9;
6 - угол между плоскостями первого и второго зеркал 9; d - расстояние между узловой точкой объектива и следом пересечения его оптической оси с плоскостью первого по ходу лучей из зеркал 9 в среднем положении каретки 7.
Отражающие поверхности зеркал 9 имеют следующие (минимальные) размеры:
первое зеркало
f (H-v)-d 2f (1+v)
второе зеркало:
f (H-v)-(d+l) 2f (l+v)
sinc, (3)
nDjjg sin(o(+6) ,
(4)
20 25 30
50
55
где D p5 - выходной зрачок объектива.
Компаратор линейных перемещений работает следзтощим образом.
Аттестуемый фотоприемник 17 устанавливают на блок 10 крепления фотоприемника и подключают выходом к входу блока 11 обработки сигналов. Каретку 7 вьгаодят в одно из крайних положений, при котором изображение
31
диафрагмы 5 заведомо не проецируется на поверхность фотоприемника 17. На шкале формирователя 13 сигналов образцовой меры длины переключателем частоты устанавливают номинальную частоту импульсов, заранее рассчитанную из условия номинального шага индикации положения каретки 7 и скорости ее перемещения, Включают источники стабилизированных напряжений питания компаратора линейных перемещений (не показаны). При этом сигналом с выхода 1 блока 16 управления включается электропривод 6, который перемещает каретку 7. В процессе движение каретки 7 оптическое изображение диафрагмы 5 перемещается по чувствительному слою фотоприемника 17, на выходе которого формируются фотоэлектрические сигналы, поступающие в блок 11 обработки сигналов. В блоке 11 обработки сигналов в момент начала этого сигнала выделяется импульс, поступающий на вход II блока 16 управления, который формирует . импульс начала отсчета и посылает его с выхода III на вход II ждущего перестраиваемого генератора 14 стабилизированной частоты. От этого импульса генератор 14 запускается и начинает генерировать последовательность калиброванных по времени и амплитуде импульсов с вышеуказанной номинальной частотой. В процессе перемещения каретки 7 датчик 15 измеряет скорость ее перемещения. Сигнал, соответствующий скорости перемещения каретки 7, поступает на вход I генератора 14 в соответствии с изменением скорости перемещения каретки 7. Последовательность коротких импульсов с выхода генератора 14 стабилизированной частоты поступает на вход I блока 16 управления. По окончании аттестации блок 16 управления формирует сигнал Конец цикла измерений , поступающий с выхода IV блока 16 управления на вход III генератора 14,. и приостанавливающий генерацию импульсов на время, необходимое для замены фотоприемника 17 на блоке 10 крепления фотоприемника.
Каждому линейному приращению перемещения каретки 7, величина которого определяется частотой импульсов ге нератора 1,4 и скоростью перемещения каретки 7, соответствует пропорциональное линейное перемещение опти
.-
ческого изображения диафрагмы 5 по поверхности позиционно-чувствитель- ного фотоприемника 17, определяемое соотношением
sin &
(5)
S 6 Ход
где S - величина перемещения оптического изображения; величина перемещения каретки 7;
угол между отражающими поверхностями зеркал 9. S каретки определяется исходя из размеров аттестуемого фотоприемника так, чтобы центральное положение каретки 7 находилось на расстоянии, равном величине d, входящей в формулу (1).
Коэффициент k трансформации перемещения равен отношению величин S /S,входящих в формулу (5):
25
5,
(6)
и может изменяться в пределах, определяемых неравенством
30
0.k.2.
(7)
35
40
45
50.
55
Таким образом, путем минимизации коэффициента k трансформации уменьшается влияние на точность перемещений зондирующего луча погрешности, вносимой неточностью шагового перемещения каретки 7. Предельная степень минимизации определяется качеством юстировки зеркал 9.
Формула изобретения
Компаратор линейных перемещений, содержащий основание с направляющей, каретку, установленную с возможностью перемещения по направляющей, электропривод, кинематически связанный с кареткой, формирователь сигналов образцовой меры длины, состо5пций из ждущего перестраиваемого генератора импульсов стабилизированной частоты и датчика скорости перемещения каретки, выход которого соединен с первым входом ждущего перестраиваемого генератора импульсов стабилизированной частоты, а вход связан с кареткой, блок управления, первый вход которого соединен с выходом ждущего перестраиваемого генератора импульсов, стабилизированной частоты, первый и второй выходы соединены с соответствующими входами электропривода, а третий и четвертый выходы соединены соответственно с вторым и третьим входами ждущего перестраиваемого генератора импульсов стабилизированной частоты, отличающийся тем, что, с целью повьшения точности аттестации поэи- ционно-чувствительных фотоприемников, он снабжен осветителем, установленным на основании так, что его оптическая ось параллельна направляющей, и расположенными по ходу
светового луча оптической отклоняющей системой, состоящий из двух стоек, установленных на каретке, и двух плоских зеркал, жестко закрепленных на стойках, при этом отражающие поверхности зеркал расположены под заранее заданным углом друг к другу, и блоком крепления фотоприемника, рабочая плоскость которого перпендикулярна оптической оси осветителя, а также блоком обработки сигналов, вход которого предназначен для подключения к нему выхода аттестуемого фотоприемник а, а выход соединен ев торьм входом блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аттестации штриховых мер | 1980 |
|
SU877461A1 |
| Устройство для аттестации штриховых мер | 1978 |
|
SU771463A1 |
| Устройство для контроля ткацких берд | 1987 |
|
SU1509448A1 |
| Устройство для аттестации линейности дифракционной решетки | 1984 |
|
SU1205103A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗУБЧАТЫХ МЕХАНИЗМОВ | 1999 |
|
RU2193752C2 |
| Устройство для аттестации штриховых мер | 1979 |
|
SU849002A2 |
| Компаратор для поверки штриховых мер длины | 1981 |
|
SU943523A1 |
| ВИЗИРНАЯ СИСТЕМА ДЛЯ АТТЕСТАЦИИ ФОТОГРАММЕТРИЧЕСКИХ КАМЕР | 1973 |
|
SU369533A1 |
| Цифровая магнитовариационная станция | 1977 |
|
SU1103172A1 |
| Фотоэлектрический автоколлиматор | 1987 |
|
SU1420361A1 |
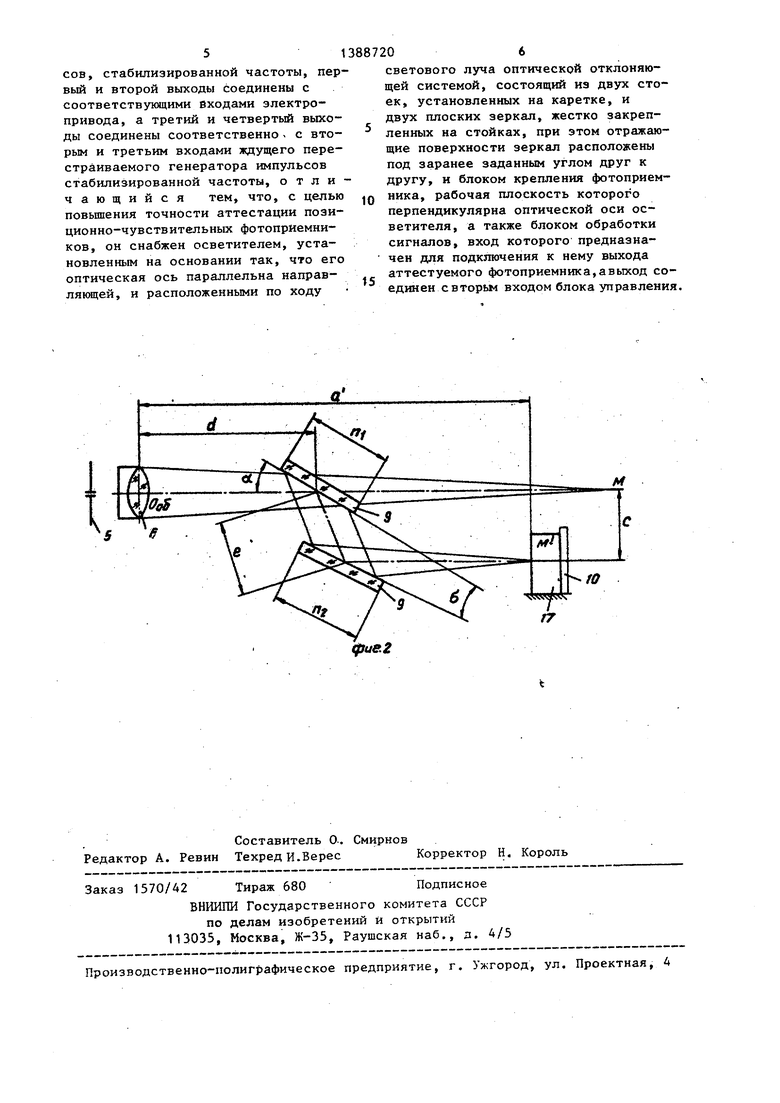
Изобретение относится к контрольно-измерительной технике.Целью изобретения является повышение точности при аттестации позиционно-чувстви- тельных фотоприемников за счет трансформации перемещений каретки с отклоняющей оптической системой в перемещения зондирующего оптического изображения и минимизации коэффициента трансформации. Оптическая система. выполненная в виде двух зеркал 9, установленных на каретке 7, отклоняет световой луч, созданный осветителем 3, от оптической оси и направляет его на поверхность аттестуемого фотоприемника 17. Каретка 7 перемещается с заданным шагом вдоль на- правлякнцей 2, параллельной оптической оси осветителя 3. При этом отклоняющая оптическая система трансформирует перемещение каретки 7 .-:в перемещение зондирующего оптического изображения по чувствительной поверхности фотоприемника 17 с коэффициентом трансформации K 2sin6, где 6 - угол между плоскостями зер- кал 9. Минимизация коэффициента трансформации К, достигаемая юстировкой зеркал 9, обеспечивает соответствующее уменьшение влияния погрешности перемещений каретки 7 на точность зондирования. 2 ил. ел
tpue.2
| Компаратор для поверки штриховых мер длины | 1981 |
|
SU943523A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
