оо (
ел
4 ел
Изобретение относится к сельскому хозяйству и может быть применено при поливе сельскохозяйственных культур широкозахватными машинами с забором воды в движении из открытых оросите- лей, например типа Кубань.
Целью изобретения является повышение качества и надежности управления водоподачей.
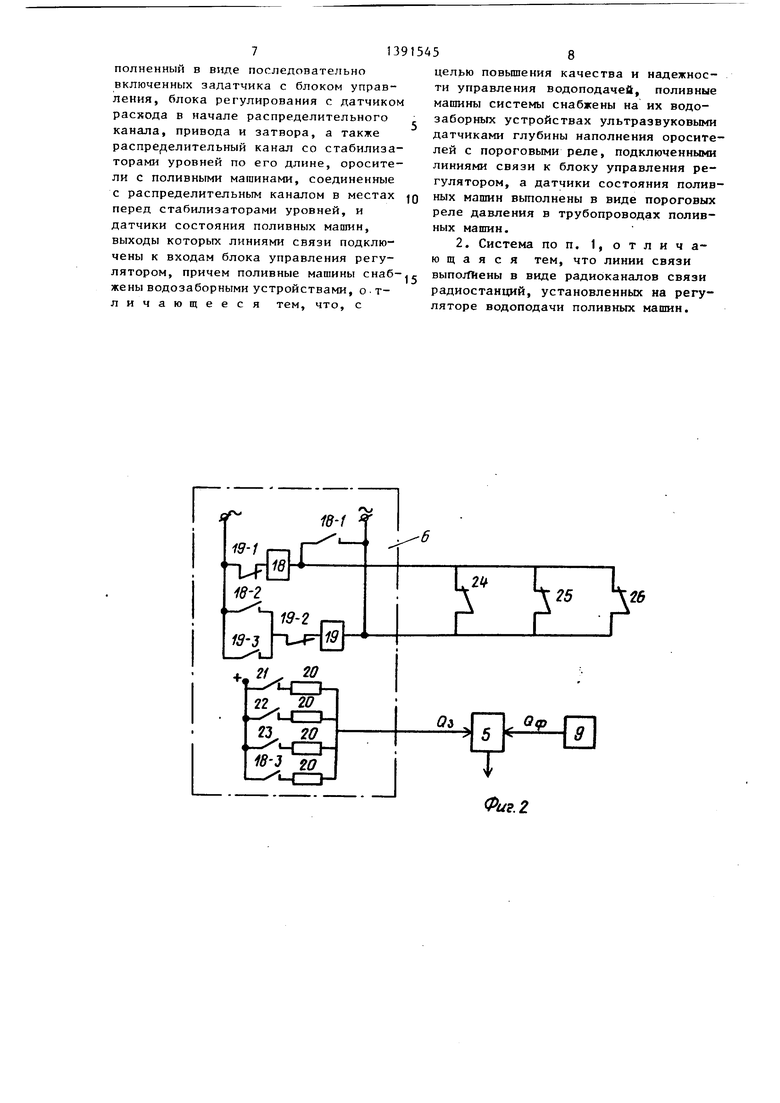
На фиг. 1 представлена схема автоматизированной оросительнор системы; на фиг. 2 - вариант электрической схемы регулятора водогюдачи; на фиг. 3 - вариант выполнения датчика минимальной глубины наполнения оросителя поливных машин; на фиг. А - таблица переключений реле 19; на фиг. 5 - вариант выполнения датчика состояния поливных машин.
Автоматизированная оросительная система содержит источник 1 орошения, регулятор 2 водонодачи, состоящий из затвора 3, привода А, блока
10
электроснабжения злектронного блока 32 от 1 енератора дождевальной машины не показана. Датчик 16 минимальной глубины наполнения оросителя может быть выполнен в виде контакта кон- певог о выключателя ЗА, механически (через нить 35 или подпружиненный стержень) соединенного трубопроводом 30, который можно использовать при хорошем качестве строительства объекта, когда дорога под центральную тележку параллельна дну оросителя. Показан также вариант выполнения 5 датчика 17 работы машины в виде реле 36 давления, установленного на напорном трубопроводе насоса 31.
Источник орошения 1 представляет собой канал, реку или водохранилище. Регулятор 2 водоподачи устанавливает величину подаваемого в распределительный канал 10 расхода соответственно сигналам датчиков 17 работы машин и датчиков 16 минимальной глу20
5 регулирования, задатчика 6, блока 7 25 наполнения оросителей. Стабили- управления с дешифратором, радиостан- заторы 11 верхнего уровня (в простей- ции 8 и датчика 9 расхода. Система гнем случае - водосливы) обеспечивают
электроснабжения злектронного блока 32 от 1 енератора дождевальной машины не показана. Датчик 16 минимальной глубины наполнения оросителя может быть выполнен в виде контакта кон- певог о выключателя ЗА, механически (через нить 35 или подпружиненный стержень) соединенного трубопроводом 30, который можно использовать при хорошем качестве строительства объекта, когда дорога под центральную тележку параллельна дну оросителя. Показан также вариант выполнения датчика 17 работы машины в виде реле 36 давления, установленного на напорном трубопроводе насоса 31.
Источник орошения 1 представляет собой канал, реку или водохранилище. Регулятор 2 водоподачи устанавливает величину подаваемого в распределительный канал 10 расхода соответственно сигналам датчиков 17 работы машин и датчиков 16 минимальной глу
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная оросительная система | 1986 |
|
SU1412667A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1319804A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1287793A1 |
| Автоматизированная оросительная система | 1983 |
|
SU1144664A1 |
| Автоматизированная оросительная система | 1983 |
|
SU1118321A1 |
| Автоматизированная оросительная система | 1988 |
|
SU1551291A1 |
| Оросительная система | 1984 |
|
SU1220588A1 |
| Способ автоматизированного водораспределения на открытых оросительных системах | 1988 |
|
SU1604264A1 |
| Способ водораспределения на открытых оросительных системах с дождевальными машинами | 1987 |
|
SU1521397A1 |
| Оросительная система | 1983 |
|
SU1161020A1 |

Изобретение относится к сельскому хозяйству. Цель изобретения - повышение качества и надежности управления водоподачей. Система содержит распределительный канал со стабилизаторами уровня за отводами в оросители с поливными машинами (ПМ) 13, регулятор 2 водолодачи в канал и paдиocиcтe fy цектрал1гзованного контроля (РЦК). Датчик 17 состояния и датчик 16 минимальной глубины наполнения оросителя установлены на ПМ. Питание осуществляется от генератора ПМ, соединенного с задатчиком 6 регулятора через регулятор 2 водо- подачи в .канал. Сигналы от датчика 17 состояния устанавливают подаваеьлп в систему расход чуть меньшим водо- потребления всех ПЛ. Сигналы датчика 16 минимальной глубины вызывают подачу дополнительных (корректирующих) объемов воды. Необходимость проводных или кабельных линий электроснабжения и связи по орошаемому массиву исключена. 1 з.п. ф-лы, 5 ил. (Л
содержит также распределительный кана 10 со стабилизаторам 1 1 верхнего , оросители 12 и пол 1вные (дож- девальные) машины 13, каждая из которых имеет радиостанцию 14, блок 15 .управления с шифратором, датчик 16 минимальной глубины наполнения оросителя и датчик 17 состояния (работы) машины.
Задатчик 6 содержит (фиг. 2) входное реле 18 с контактами 18-1, 18-2, 18-3, реле 19 времени с контактами 19-1, 19-2, 19-3 и элементы 20 настройки (резисторы). Последние согласно схеме соединен с контактами 21, 22, 23 блока 7 управления радиостанцией, связанными посредством радиосвязи с дaтчикa и 17 состояния (работы) машин, и с контактами 24, 25, 26 блока 7 управления радиостанцие, связанными с датчиками 16 минимально глубины наполнения оросителя.
Датчик 16 минимальной глуб1 НЬ наполнения оросителя (фиг. 3) выполнен на основе ультразвукового излучателя- приемника 27, установленного на поплавке 28 водозаборного устройства 29, соединенного трубопроводом 30 с насосом 31 дождевальной машины, электронного блока 32 и порогового реле 33, соединенного через блок 15 yпpaвJ eния с радиостанщ ей 14.
пропуск вниз по распределительному каналу всего избыточного расхода, 1 риводяшего к превь шению уровня воды над установленным.
Радиостанция 8 с блоком 7 управления, установленная на регуляторе 2 водоподачи, и радиостанция 14 с бло- ками 15 управления, установленная на дождевальных машинах 13, образуют радиосистему ;ентрализованного контроля. Эта радиосистема обеспечивает замыкание контактов 21, 22, 23 по сигналам датчиков 17 при включении в работу соответствующей доигдеваль- ной машины или размыкание контактов. при отключении ма 11ины. Замыкание контактов 24, 23, 26 происходит при глубине наполнения ниже значения Н„, установленного на связанном с данным контактом датчике 16 минимальной глубины наполнения оросителя, а размыкание - при значении выше Нц. Резисторы 20 при настройке подбирают так, чтобы протекающий через них ток составлял 97-98% от номинального расхода соответствующей дождевальной машины.
Величина Н выбирается так, чтобы между зтим уровнем и предельным минимальным уровнем Н
ми ч
оросителя.
определяемым техусловиями работы маши Hiji,
заключался объем V, равный
произведению номинального расхода Q (( машины на время t, добегания:
V Q,
Установка контакта 19-2
реле 19 времени, определяющего дли- тельность цикла корректирования, прнимается большей времени добегания до нужнего оросителя. Установка контакта 19-1, определяющая объем корректирующего импульса, принима- ется такой, чтобы этот объем V, будучи размещенным над Н, приводил к повьшению уровня до величины Н, которая устанавливается (с целью исключения даже кратковременных сброс воды) такой, чтобы между уровнем установки стабилизатора 11 и этим уровнем заключался объем , ta. Оросители выполняются безуклонными и присоединены к распределительному каналу 10 без перепада.
Блок 5 регулирования сравнивает величину требуемого расхода Qa на выходе задатчика 6 с фактическим ра ходом Qip на выходе расходомера 9 и че{)ез привод 4 изменяет положение затвора 3 до тех пор, пока не будет обеспечено Qcp Qx.
Автоматизированная оросительная система работает следующим образом,
В установившемся режиме включен в работу некоторая совокупность машин. Датчики 17 состояния (работы) этих машин подают сигналы, поэтому соответствуклцие контакты 21, 22, 23 замкнуты, а суммарный ток через резисторы 20 пропорционален величине на 2-3% меньшей, чем номинальное во- допотребление работающих машин. Суммарный ток сравнивается блоком 5 регулирования с током на выходе датчика 9 расхода, причем блок 5 регулирования через привод 4 будет передвигать затвор 3 до тех пор, пока подаваемый расход Q не станет равным установленному задатчиком Q,.
В связи с использованием стабилизаторов 11 верхнего уровня все оросители, кроме самого нижнего из оросителей, с работающит-ш машинами (далее он именуется нижний работающий оро- ситель) заполнены, поэтому контакт 24, 25, 26, связанные с их датчиками 16, разомкнуты.
Установленный настройкой резисторов 20 небольшой отрицательный неба- ланс между подаваемым в систему расходом и потреблением воды включенными машинами проявляется в виде плав-
- Qjj 20
25
,п
5
40
5454
ноге понижения уровня в нижнем работающем оросителе. Когда урорент поды понижается до Нц, датчик 16 минимальной глубины наполнения оросителя подает сигнал, который вызывает замыкание соответствующего контакта (24, 25 или 26), который включает реле 18. Включившись, реле 18 контактом 18-1 создает цепь самопитания (до размыкания контакта 19-1), контактом 18-2 включает реле 19 времени, которое через свой мгновенный контакт 19-3 встает на самопитание до размыкания контакта 19-2, а контактом 18-3 увеличивает сигнал о величине требуемого расхода на величину около , В течение времени, установленного контактом 19-1, в распределительный канал подается расход, значительно превышающий водопотребление работающих машин, размыкание контакта 19-1 приводит к отключению реле 18 независимо от состояния контактов 24, 25, 26, размыканию его контакта 18-3 и уменьшению подаваемого расхода до величины на 2-3% меньшей, чем водопотребление работающих машин. Это состояние схемы сохраняется до окончания отсчета контактом 19-2, когда в распределительный канал отправлен расчетный объем воды. Схема задатчика находится в состоянии ожидания, пока этот объем не добежит до нижнего работающего оросителя и относительно быстро не увеличит его заполнение до глубины больше Гц , что приводит к снятию сигнала датчика 16 и размыканию включившихся контактов 24, 25, 26. По окончании отсчета времени контакт 19-2 реле 1-9 размыкается, что возвращает схему в исходное состояние. Уровень в нижнем работающем оросителе очень плавно уменьшается. , Через несколько часов он уменьшится до появления сигнала с датчика 16 и процесс подачи положительного коррек-, тирукщего импульса расхода повториться аналогично описанному.
Возможны четыре варианта перехода к новому установившемуся режиму,
связанные с изменением количества
f
работающих машин.
щему увеличению luviaB eMDro в ряслфе делительный канал расхода. Вновь включенная машина работает ил ранее накопленном запасе ноды н ее оросителе Увеличенньй расход сначала добегает до нижнего работающего оросителя, заполняет ei o до уровня установки стабилизатора, после чего подается в новый работающий ороситель - система переходит на работу в новом установившемся режиме.
ческий запас размещается над Hg. Уровень плавно уменьшается, система переходит в новый установившийся режим.
в том, что динамический запас воды из расгфеделительного канала аккумулируется в оросителе с низшей работавшей машиной.
56
После отключения всех машин система сохраняет постоянную готовность к влюЧению любой дождевальной машины путем поддержан 1Я заполненности всех оросителей. Если из-за фильтрации, испарения и т.п. уровень в каком-то оросителе опускается ниже Н, то по сигналу датчика 16 машины этого оросителя замыкается соответствующий контакт (24, 25 или 26), что будет иметь следствием подачу корректирую- оЕ)ъемов воды до тех пор, пока не заполнятся все вьш1ерасположенные оро сители, а уровень в данном оросителе не увеличится до уровня, превышающего Hj . Аналогично этому автоматически производится первичное заполнение оросителей nepe/i началом поливного периода, так как при отсутствии воды все контакты 24, 25, 26 замкнуты.
Повьш1ен1 е качества управления достигается за счет того, что контролируется глубина наполнения оросителя именно там, где это необходимо в данный момент - под водозаборным уст- ;)ойством поливной машины. Стационаг - ные датчики уровней приходится наст- раивать на какой-то усредненный уро-
векь, что при недостаточно высоком качестве строительства оросителей (отклонения дна от проектной линии) вызывает необходимость ог раничений или приводит к остановкам машин и (или) сбросам воды.
Кроме т(5го, система обеспечивает автоматизацию водораспределения с исключением необходимости строи- . тельства и эксплуатации линий : лект- роснабжения и приводных на орошаемом массиве. Дополнительное сокращение затрат достигается за счет исключения необходимости двух стационарных датчиков уровня перед каждым стабилизатором верхнего уровня. Большинство элементов системы изготавливается серийно, в качестве датчиков минимальной глубины наполнения оросителей можно применить широко используемые на речных судах ультразвуковые глубиномеры, снабдив их пороговыми элементами.
Формула изобретения
жены водозаборными устройствами, о . т- личающееся тем, что, с
радиостанций, установленных на регуляторе водоподачи поливных машин.
t5A58
целью повьппения качества и надежности управления водоподачей, поливные машины системы снабжены на их водо- г заборных устройствах ультразвуковыми датчиками глубины наполнения оросителей с пороговыми реле, подключенными линиями связи к блоку управления регулятором, а датчики состояния полив- 10 ных машин вьтолнены в виде пороговых реле давления в трубопроводах поливных машин.
радиостанций, установленных на регуляторе водоподачи поливных машин.
У -
Фи.2
35
J«
( 3 7а6пица nepeH/i ve fua реле 19
y QH-tg.
фиг-. 5
Фиг.
| Автоматизированная оросительная система | 1985 |
|
SU1319804A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
