Изобретение относится к электроэнергетике и может быть использовано при построении систем управления эл(2ктропотреблением.
Цель изобретения - повышение эконмичности и точности управления электропотреблением.
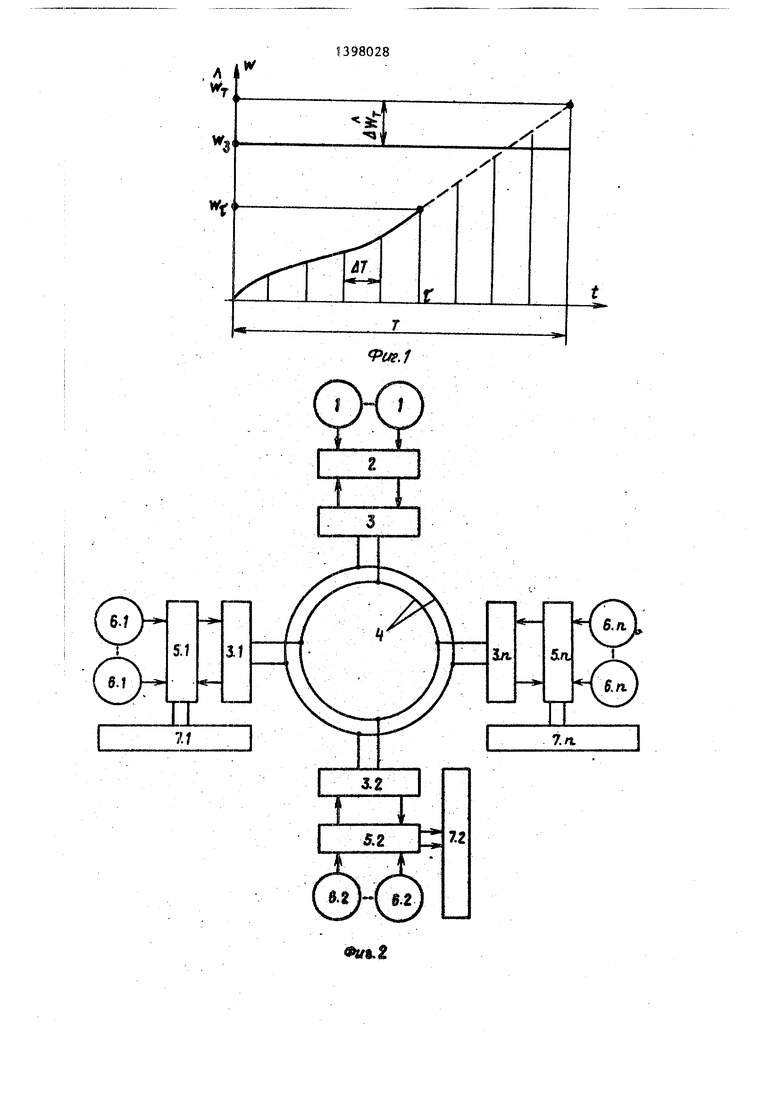
На фиг. 1 представлен график, поясняющий способ управления электро- потреблением предприятия; на фиг. 2 система управления электропотреблени предприятия для реализации способа;
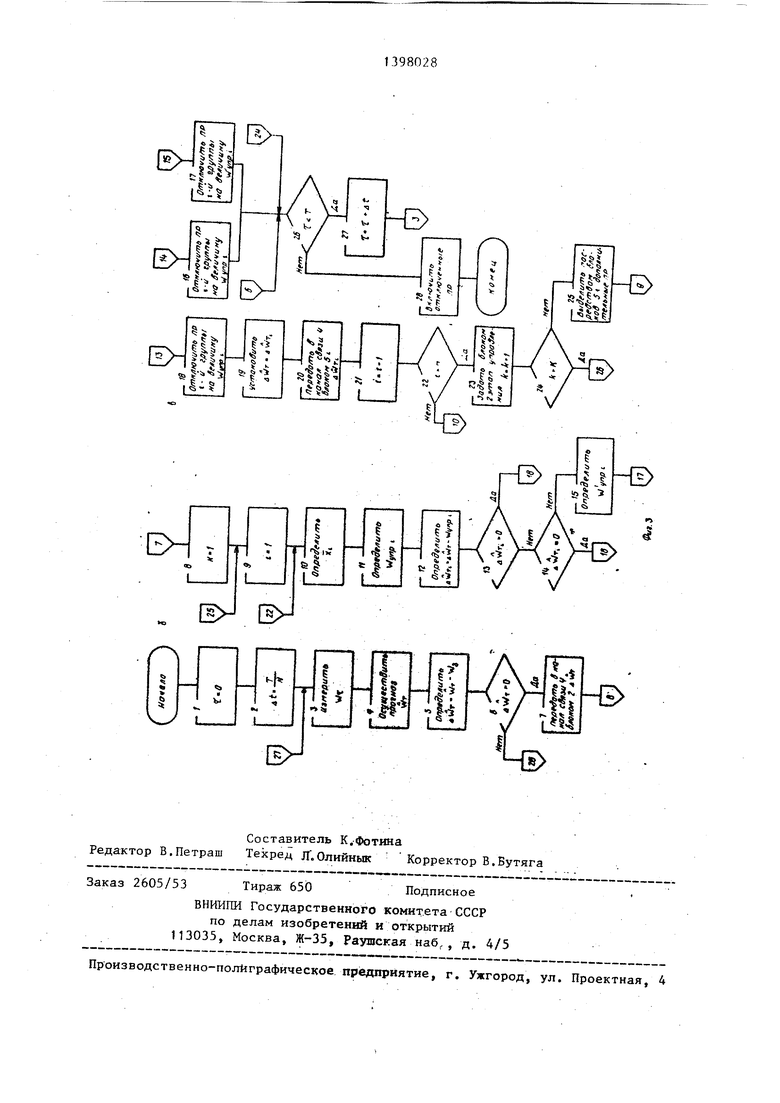
на фиг. 3 - начало (а), середина (f) и конец (fc) алгоритма управления электроптреблением предприятия по предлагаемому способу.
Система управления электропотреблением предприятия (фиг. 2) состоит из датчиков 1 расхода электроэнергии подключенных к блоку 2 сбора и обработки информации, подключенному через блок 3 сопряжения к кольцевому каналу 4 связи, к которому подключены через блоки 3,1,3.2,,..,3.п сопряжения локальные блоки 5.1,5,2,.. 5.П управления потребителями-регуляторами (ПР). К каждому из локальных блоков 5.1,5.2,...,5.п управления ПР подключены соответствующие датчики 6,1,6.2,...,6.п технологических процессов, а выходы локальных блоков 5 Л ,5.2,.,.,5.п управления ПР подключены к соответствующим формирователям 7.1,7.2,,..(,7.п управляющих сиг- н алов.
С начала контролируемого интервала времени Т (фиг.. 1) с помощью датчиков 1 расхода электроэнергии и бло
ка -2 сбора и обработки информации (фиг. 2) периодически через время
ut( где N - число точек контроля) измеряют реальное электропотребление W-f (Т- текущая точка контроля) . Блоком 2 сбора и обработки информации осуществляется прогноз электропотребления к концу контролируемого интервала времени Т.
Определяется величина рассогласования между прогнозным W и заданным Wj на контролируемый интервал времени Т значениями электропотребления
AtJi WT-Wi.,..
Если то осуществляют управление электропотреблением. Для этого блок 2 сбора и обработки информации через блок 3 сопряжения передает в
5
JQ
0
канал 4 связи величину снижаемого электропотребления .
Локальные блоки 5,1,5.2,,..,5.п управления ПР осуществляют первый этап управления, причем управление осуществляется в порядке заданной очередности и без ущерба для данного технологического процесса. Локальньй блок 5.1 управления ПР на основании информации датчиков 6.1 технологических процессов определяет вектор состояния X, первой группы ПР. В простейшем случае вектор Х может представлять собой множество скалярных величин xj,,e Х, которые равны О или 1, т.е„ индикаторов состояния ПР
(Включен или Выключен ПР). I
С учетом определенного вектора состояния Х и известных мощностей ПР, входящих в первую группу ПР, определяется величина снижаемого данной группой ПР электропотре&ления 5 WVOP, 1 . Определяется разность между лит- и Wynti , т.е.
д№г ,- -Wync .
При этом в зависимости от значения разности А WT/I возможны три .варианта Q формирования управляющих воздействий локальным блоком 5.1 управления ПР.
Вариант 1 . Если Aw-tj 0, то через формирователи 7,1 управляющих сигналов осуществляется отключение выделен нык в первой группе ПР на величину Wyjijp . В этом случае достигается поставленная цель и дальнейшее управле5
ние не осуществляется.
А
0 Л
Вариант 2.. Если лЦ. 0, то величикорректируется по закону т- -«-гахп при выполнении условия
0
5
Щ-t О и аналогично осуществляется отключение выделенных ПР на скорректированную величину WVRPJ . В этом случае цель также достигается.
Вариант 3. Если , то осуществляется отключение выделенных ПР на величину Wy(, , а разность д W передается в канал 4 связи. Данная разность принимается локальным блоком 5.2 управления ПР, который аналогично блоку 5,1 на основании информации датчиков 6.2 технологических сов определяет вектор состояния Х второй группы ПР и определяет величину снижаемого данной группой ПР электропотребления W . Определяется разнос,ть между д Wj.., и W,Jцp. , т.е.
Л i) -rWypp. 1 .
31398028
Анализируются варианты 1-3 форми-та предприятия по электропотреблению
рования управляющих воздействий, и,и за счет повышения гибкости управеслиДЙ|.0, то разность А(гг посту-ления ПР. пает в канал 4 связи. Причем данный
процесс продолжается вплоть до дости-Формула изобретения жения последней группь ПР, т.е. до
формирования управляющих воздействий Способ управления электропотреблелокальным блоком 5.п управления ПР.нием предприятия, заключающийся в
Локальным блоком 5.п управления . ютом, что периодически измеряют электПР на основании информации датчиковропотребление с начала контролируемо6.П технологических процессов опреде-го интервала времени, определяют векляется вектор состояния Хп п-й труп-торы состояния потреёителей-регулятопы ПР и определяется величина снижав-ров, осуществляют прогноз электропотмого п-й группой ПР электропотребле- 15требдения к концу контролируемого
ния Wyfjp п Определяется разность меж-интервала времени, определяют величиKybWf() и Wynp.n т.е.ну рассогласования между прогнозным
л А чИ заданным на контролируемый интер п УПР. времени значениями электропотреб- Анализируются варианты 1-3 форми „ 20ления и, если значение прогнозного
рования управляющих воздействий,
Л лэлектропотребления превышает значение и. еслилити 0. то данная разность„
ip J «-заданного на контролируемый интервал поступает в канал ч связи и через
-::времени электропотребления, то формиблок 3 сопряжения принимается бло-.
„ , - - .руют управляющее воздействие на сни- ком 2 сбора и обработки информации, о,-,
„-г ,- 25жение электропотребления потребитекоторыи выдает команду в канал 4 -
зи для осуществления локальными бло- ™ми-регуляторами, отличаюками 5. 1,5.2,... ,5 .п управления ПРЩ и и с я тем, что, с целью повыше„ния экономичности и точности, упомявторого этапа управления. В этом слу- . j
чае каждый из локальных блоков 5.1, определения векторов состояния
5.2,...,5.п управления ПР выделяет 30потребителей-регуляторов осуществ„т,-ляют для каждой из групп сосредотодополнительные ПР, отключение кото-t j у н м-л
-ченных потребителей-регуляторов, а
рых приводит к минимальным ущербам, л.,
формиров ание управляющего воздействия
данного технологического процесса. у j « «
Процесс отработки разности д гпосуществляют поэтапно в заданном
осуществляется аналогично первому эта-35Д РУ потребителей-регуляторов
пу управления с отключением дополни-порядке, при этом на первом этапе
тельных ПР. управления определяют разность между
На каждом дополнительном этапевеличиной рассогласования прогнозного управления локальные блоки 5.1, заданного на контролируемый ин- 5.2,...,5.п наращивают число ПР. При- 40тервал времени электропотребления чем каждое последующее наращивание« величиной снижаемого электропотреб- числа ПР осуществляется по критерию « стоящей первой в порядке оче- минимального ущерба для данного тех-редности группы потребителей-регуля- нологического процесса от отключенияторов, полученную разность сравнивают дополнительных ПР, участвующих в 45с величиной снижаемого электроптреб- управлении электропотреблением на дан- «я последующей в порядке очередном этапе управления,ности группы потребителей-регуляторов.
По истечении контролируемого ИИ-причем указанный процесс продолжает-
тервала времени Т локальными блока- « «° достижения последней группы
ми 5.1,5.2;...,5.П управления ПР фор-50 ° Р й-регуляторов либо до полумируются управляющие воздействия величины разности, равной или
на восстановление работоспособности меньшей нулю, если данная разность
отключенных ПР.больше нуля, то переходят на следуюПовьппение экономической эффектна- управления электропотребле ности достигается за счет обеспече- 55и осуществляемый аналогично прения максимального использования лими-дыдущему этапу.
л
Wr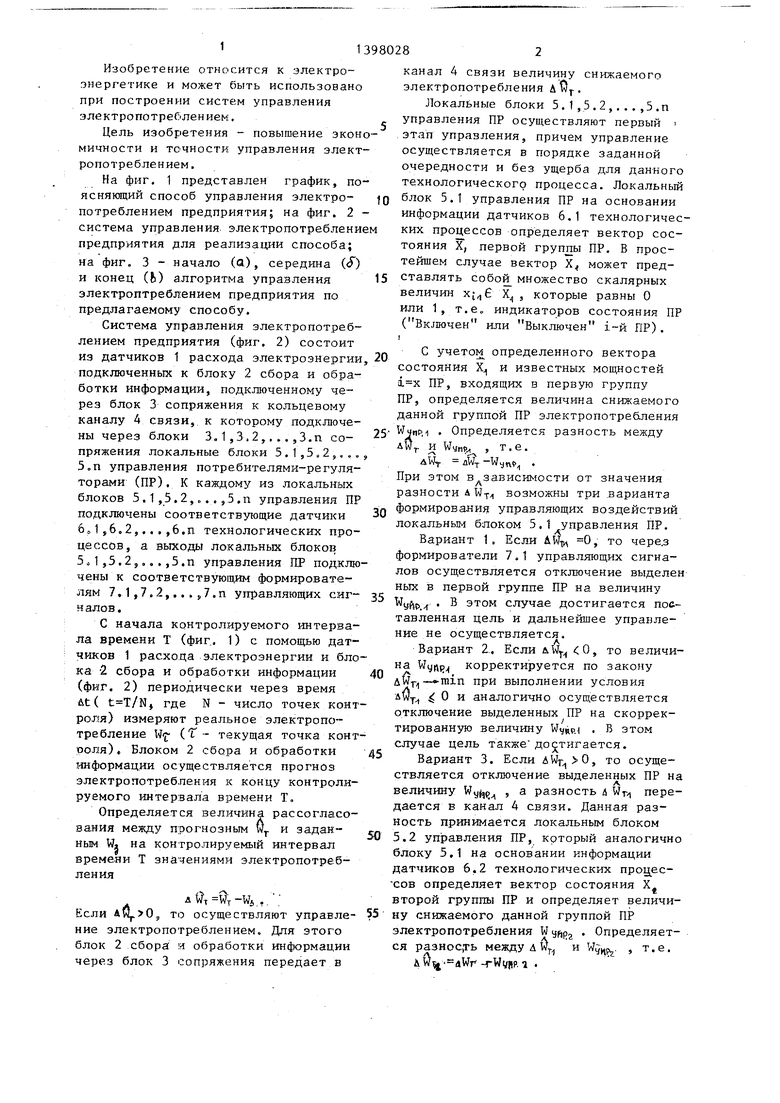

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления режимами электропотребления предприятия | 1988 |
|
SU1582278A1 |
| Способ управления потреблением электроэнергии промпредприятия | 1986 |
|
SU1334269A1 |
| Устройство для управления электропотреблением предприятия | 1983 |
|
SU1125605A1 |
| Способ автоматического управления электрической нагрузкой | 1988 |
|
SU1605294A1 |
| Способ выбора режима электропотребления | 1989 |
|
SU1659877A1 |
| Устройство для управления электропотреблением предприятия | 1984 |
|
SU1246246A1 |
| Устройство для управления электропотреблением предприятия | 1987 |
|
SU1429219A1 |
| Устройство для управления электропотреблением предприятия | 1985 |
|
SU1292109A1 |
| Устройство для автоматического регулирования электрической нагрузки | 1985 |
|
SU1259414A1 |
| СПОСОБ ПРЕВЕНТИВНОЙ ЗАЩИТЫ СУДОВОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ ОТ ПЕРЕГРУЗКИ | 2024 |
|
RU2833907C1 |
Изобретение относится к электротехнике. Цель изобретения - повьшение экономичности и точности управления. Для достижения цели централизованно измеряют электропотребление предприятия, определяют его прогнозное значение и, если прогнозное электропотребление превышает заданное, осуществляют децентрализованное управление в заданном для групп потребителей - регуляторов (ПР) порядке. Для зтого в каждой группе сосредоточенных ПР определяют векторы их состояния, на основании которых вырабатывается величина злектропотребления, снижаемая данной группой ПР. Величина рассогласования между прогнозным и заданным электропотреблением сравнивается с величиной электропотребления, снижаемого первой группой ПР, и, если данная разность больше нуля, то остаток необходимого для отк11ючения электропотребления сравнивается с величиной электропотребления, снижаемого послед аощей в порядке очередности группы ПР. Данный процесс продолжается до получения разности, меньшей или равной нулю. Если по достижении последней группы ПР величина рассогласования не отрабатывается, то переходят на следующий этап управления. 3 ил. (/
w.
t
Фил.Ё
/
X
x
/
-
.f
Ч
п
| Устройство для автоматического управле-Ния элЕКТРичЕСКОй НАгРузКОй пРЕдпРия-Тия | 1979 |
|
SU805472A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электропотреблением предприятия | 1984 |
|
SU1246246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
