4
со
s|
Изобретение относится к технике измерений и может быть использовано для определения малых значений относительной нелинейности амплитудных характеристик четырехполюсников.
Цель изобретения - повышение точности определения малых значений относительной нелинейности амплитудных характеристик четырехполюсников без повышения разрядности используемого аналого-цифрового преобразователя.
На чертеже приведена структурная схема устройства.
Устройство содержит генератор 1, переменньм аттенюатор 2, исследуемый четырехполюсник 3, направленный от- ветвитель 4, согласованную нагрузку 5, квадратичный детектор 6, два двух- позидаонных аттенюатора 7 и 8, аналого-цифровой преобразователь 9, вычислительный блок 10, первую 11 и вторую 12 клеммы устройства для подключения исследуемого четырехполюсника.
Выход генератора 1 через последовательно соединенные переменный аттенюатор 2, первый двухпозиционный аттенюатор 7, первую клемму 11 устройства, четырехполюсник 3, вторую клемму 12 устройства, второй двухпозиционный аттенюатор 8, ответвитель 4 с согласованной нагрузкой 5j детектор 6 и преобразователь 9 подключен к входу вычислительного блока 10.
Устройство работает следующим образом.
Исследуемый четырехполюсник 3 устанавливается между клеммами 11 и 12. Его амплитудная характеристика может быть представлена в виде суммы линейной и нелинейной зависимости, которая имеет следующий вид
792
На выходе четырехполюсника 3 установлен направленный ответвитель 4, ориентированный на отбор проходящей мощности. В одном из его плеч выделяется высокочастотный сигнал, пропорциональный выходному высокочастотному сигналу четырехполюсника. Детектор 6 преобразует высокочастотный сигнал на выходе четырехполюсника 3 в пропорциональное постоянное напря
жение, которое аналого-цифровым преобразователем 9 преобразуется в цифровой код. Градуировочная характеристика последовательно соединенных ответвителя 4, детектора 6 и преобразователя 9 имеет следующий вид:
у (z) ,
(2)
где Z - значение цифрового кода на
выходе преобразователя 9; Ъ - крутизна последовательно соединенных ответвителя 4, детектора 6 и преобразователя 8; F(z) - относительная нелинейность
преобразования выходного напряжения четырехполюсника 3 в цифровой код на выходе преобразователя 9.
Из-за нелинейности преобразования переменного напряжения в постоянное напряжение, представленное цифровым кодом, измерение малых значений нелинейности амплитудной характеристики исследуемого четырехполюсника 3 имеет значительные погрешности.
Учитывая (1) и (2), можно получить соотношение, устанавливающее зависимость между входным высокочастотным напряжением исследуемого четьфехпо- люсника 3 и выходным цифровым кодом преобразователя 9, в виде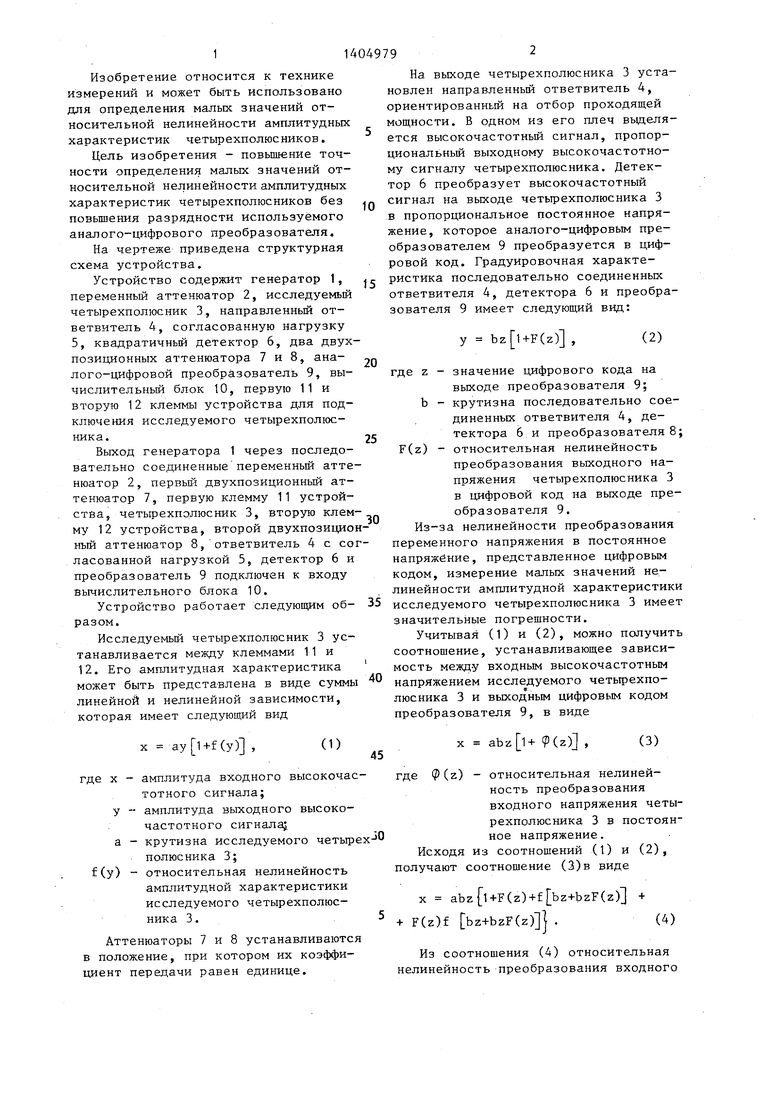



Изобретение относится к технике измерений. Устройство для определения относительной нелинейности амплитудных характеристик четырехполюсни- ков (ЧП) содержит генератор 1, переменный аттенюатор 2, направленный от- ветвитель 4, согласованную нагрузку 5, квадратичный детектор 6, аналого- цифровой преобразователь (АЦП) .9, двухпозиционные аттенюаторы 7, 8, вычислительный блок 10. Устройство имеет повышенную точность определения малых значений относительной нелинейности амплитудных характеристик исследуемого ЧП 3 без повышения разрядности используемого АЦП. 1 табл ., 1 ил.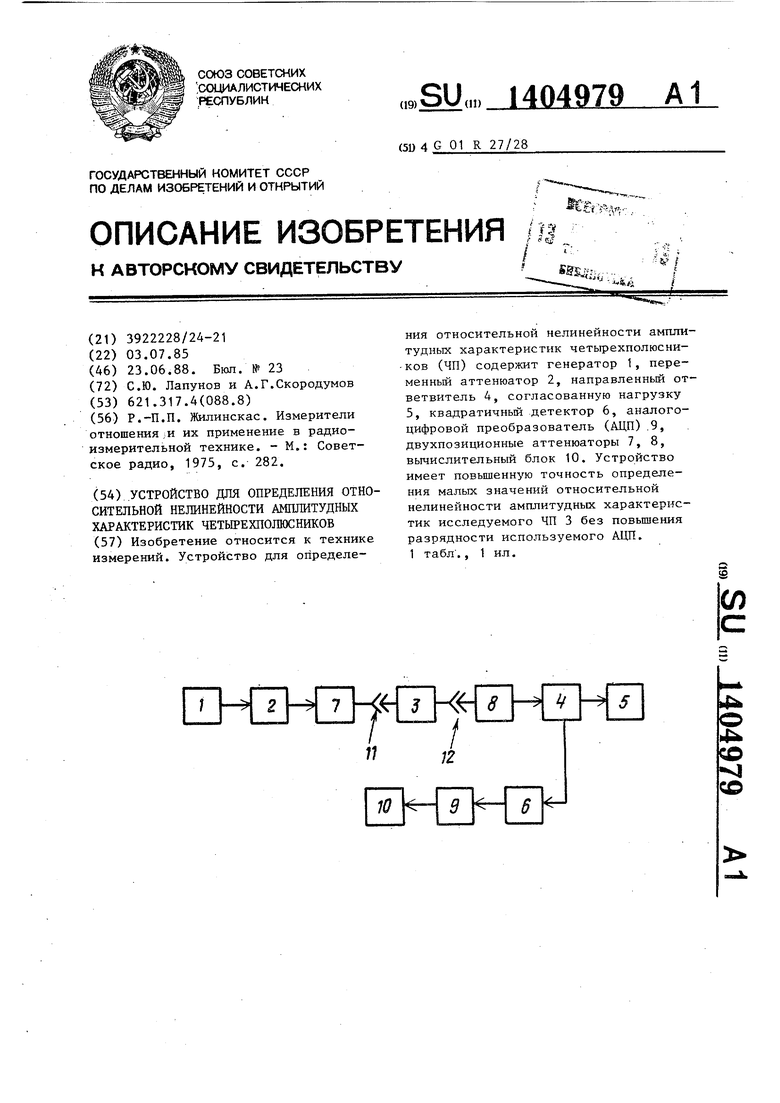
X (y) ,
(1)
где X - амплитуда входного высокочастотного сигнала; у -- амплитуда выходного высокочастотного сигнала а - крутизна исследуемого четыре
полюсника 3;
f(y) - относительная нелинейность амплитудной характеристики исследуемого четырехполюсника 3.
Аттенюаторы 7 и 8 устанавливаются в положение, при котором их коэффициент передачи равен единице.
45
X P(z) ,
(3)
где Ф(z) - относительная нелинейность преобразования входного напряжения четырехполюсника 3 в постоянное напряжение. Исходя Из соотношений (1) и (2),
получают соотношение (3)в виде
X (z)+f bz+bzF(z) + + F(z)f bz+bzF(z)j .
(4)
Из соотношения (4) относительная нелинейность преобразования входного
1404979
напряжения четырехполюсника 3 в цифровой код имеет вид
((z)F(z)+f bz+bzF(z) + + F(z)f bz+bzF(z) .
Затем аттенюатор 7 переводится в положение 2, в котором его коэффиПренебрегая произведением относительных нелинейностей F(z) и f(bz),. ,,,
,„/ч , ..г iT /Nimциент передачи равен 1/М, а аттенюа- а также bzF(z) в функции frbz+bzF(z)L О о
/ел- тор о имеет коэффициент передачи,
получают соотношение (5) в виде„ „ г ,
равный единице. На входе аттенюатора
ФС 1 FC ) + f fЬ t (ft) устанавливают вновь значения высокочастотного сигнала X, ,Х, . , . , Х .
„ff. IE; На ВХОД исследуемого четьгоехполюсниПолученное соотношение (6) опреде-
,ка 3 эти сигналы поступают уменьгаенляет связь между функциями относительной нелинейности f(z), F(z), (z). Представим функции относительной нелинейности в виде полиномов степени р:
р20
ные в М раз. С помощью ответвителя 4 детектора 6 п значений выходного сигнала четьфехполюсника 3 преобразуют в постоянное напряжение, которые с помощью преобразователя 9 преобразуются в цифровой код z , ,z,. .. ,.3Ha чения цифрового кода вводятся в память вычислительного блока 10. Исходя 25 из соотношений (3) и (9), получают п уравнений вида
Z:c;z ; 1 1
i p
i
dj Zl .
Подставляя соотношения (7)-(9) в формулу (6)j получают выражение для определения коэффициентов искомой относительной нелинейности амплитуд- 30 ной характеристики исследуемого че- тьфехполюсника 3 через коэффициенты относительной нелинейности преобразования выходного напряжения исследуемого четьфехполюсника 3 в постоянное 35 напряжение и далее в цифровой код и коэффициенты относительной нелинейности преобразования входного напря- жения четьфехполюсника 3 в цифровой код:
яЬ,-5
4- d,z;+.
J(12)
X
М
abzn + d,z + .-. . H-dpZ,
Поделив уравнения системы (11) на соответствующие уравнения системы (12), получают систему из п нелинейных уравнений с р+1 неизвестными М, d,, .. ., dp :
40
С, (d, - T,)/b;
Р
(dp - Tp)/b
z, Mz , 4-d/(Mzf -z) + ...-fdp(Mir-z ; )l
i M|; d,(Mkr-zU...-bdp(MzrV: ).J
(13)
Решая систему нелинейных уравне/ g кий (13), вычислительньй блок 10 определяет .коэффициенты d, ,.. , ,dp степенного ряда, аппроксимирующего функцию
С помощью аттенюатора 2 последовательно устанавливаются на входе четырехполюсника 3 п неградуированных. стабильных значений высокочастотного напряженнн четырехполюсника 3 в пос- сигнала X., X,,.,., Х„. Исходя из ,тоянное напряжение и далее в цифровой соотношения (3). учитЫвая формулу (9), Хранящиеся в памяти вычислитель- получают систему из п уравнений вида: ° значения цифровых кодов
z,,z,.t., z, исходя из соотношений (2) и (8), связаны с соответствующими значениями выходного высокочастотно. rnjl J /J,cl, C4llli- ui4k-n.rai ii i jjnc:± « tjyrLi
, относительной нелинейности (z) .
Затем определяется относительная нелинейность преобразования выходного
x,abz, l+d,z, + ... +dpzf ; n abzjud,... -bdpz }
(11)
gc„
ГО сигнала четырехполюсника 3 следующими уравнениями:
где z, ,z,j, . ,. ,z - значения цифровых
кодов на выходе преобразователя 9,
соответствующие высокочастотным сигналам.
Эти п значений цифровых кодов z,..., г„ вводятся в память вычислительного блока 10.
Затем аттенюатор 7 переводится в положение 2, в котором его коэффи. ,,,
.
20
ные в М раз. С помощью ответвителя 4, детектора 6 п значений выходного сигнала четьфехполюсника 3 преобразуют в постоянное напряжение, которые с помощью преобразователя 9 преобразуются в цифровой код z , ,z,. .. ,.3Ha- чения цифрового кода вводятся в память вычислительного блока 10. Исходя 25 из соотношений (3) и (9), получают п уравнений вида
яЬ,-5
4- d,z;+.
J(12)
X
М
abzn + d,z + .-. . H-dpZ,
Поделив уравнения системы (11) на соответствующие уравнения системы (12), получают систему из п нелинейных уравнений с р+1 неизвестными М, d,, .. ., dp :
z, Mz , 4-d/(Mzf -z) + ...-fdp(Mir-z ;
30 35
40
кий (13), вычислительньй блок 10 определяет .коэффициенты d, ,.. , ,dp степенного ряда, аппроксимирующего функцию
. напряженнн четырехполюсника 3 в пос- ,тоянное напряжение и далее в цифровой Хранящиеся в памяти вычислитель- ° значения цифровых кодов
. rnjl J /J,cl, C4llli- ui4k-n.rai ii i jjnc:± « tjyrLi
относительной нелинейности (z) .
Затем определяется относительная нелинейность преобразования выходного
z, исходя из соотношений связаны с соответствующими выходного высокочастотно„
четырехполюсника 3 следующими уравнениями:
у, в bz, И-Т, Z,+... +Тр2 ;
V izJlVT,,+ ...4Tpz|; .
(14)
После чего аттенюатор 7 переводится снова в положение 1, при котором его коэффициент передачи равен единице, а атенюатор 8 переводится в положение 2, при кот орЪм его коэффициент передачи равен 1/К, При этом на входе исследуемого четьфехполюсника 3 устанавливаются первоначальные уровни высокочастотного сигнала. Аттенюатор 8 уменьшает уровни сигнала на выходе четьфехполюсника 3 в К раз. Измененные значения высокочастотного сигнала через ответвитель 4 поступают на детектор 6. Преобразователь 9 преобразует соответствующие значения постоянного напряжения в цифровой код zj,.,,,z, которые вводятся в память вычислительного блока 10. Исходя из уравнений (2) и (8), получается п уравнений вида:
У - fi+T 7 + +т 7 П-1 - - bz i+i,z, .. .-t-ipZ J ,|
I ,z...-Hpz; .
(15)
Поделив уравнения системы (14) на соответствующие уравнения системы (15), получают систему из п нелинейных уравнений с р+1 неизвестными К,
Т ,... ,Т
Р
Z, Kz; +т, (Kz7y,)+.. .
z Kz; +Т, ( ) +.. .Т(
Решая систему нелинейных уравнений (16), вычислительньш блок 10 определяет коэффициенты Т,,...,„ степенного ряда, аппроксимирующего нелинейную функцию F(z). Используя соотношения (10) и найденные коэффициенты dj и Т; , вычислительный блок 10 определяет искомые коэффициенты с относительной нелинейности исследуемого четьфехполгосника 3. Найденная нелинейность амплитудной характеристики четьфехполюсника 3 не содержит нелинейность.преобразования переменного напряжения в постоянное, в результате чего и повьшается точность измерений. Коэффициент b характери- зует крутизну последовательно соединенных ответвителя 4, детектора 6 и преобразователя 9, Значение данного коэффициента может быть легко определено.
Приведем пример практической реализации измерения нелинейности амплитудной характеристики четырехполюсника. В качестве двухпозиционных аттенюаторов 7 и 8 используются аттенюаторы с вносимым затуханием S 2 дБ. Аттенюатор 2 и генератор 1 обеспечивают подачу на вход четьфехполюсника
3 высокочастотной мощности от О до 100 мВт. В качестве преобразователя 9 использовался вольтметр, а в качестве нагрузки 5 - ваттметр поглощаемой мощности. Для определения крутизны преобразования последовательно соединенных ответвителя 4, детектора 6 и преобразователя 9 одновременно снимались показания ваттметра и вольтметра, которые имели значение соответственно: Р 43, 21 мВт, И
36,95 мВт. Крутизна в определялась, как в 1,169. Представляя амплитудную градуировочную характеристику преобразования входного и выходного
напряжений четырехполюсника 3 квадратичной зависимостью, получают соотношения (1) и (3) в виде
30
X ау(1 + с,у); X abz(1 + d,z),
(17)
Тогда система уравнений (13) для определения d и М имеет еледуюш 1й вид:
.- (г
л- 1
Мг + d,(Mz, - z,);
(18)
,-1
z Mz + d,(Mzj - Zj).
Система уравнений (16) для опреде- 0 ления имеет с учетом уравнений (3) следующий вид: ..-(
5
Кг; + Т,(Кг - z); Kzl + T(Kz f- zl).
(19)
0
С помощью аттенюаторов 2,7 и 8,а также генератора 1 определяются показания вольтметра z 49,78 мВ; z, 31,81 мВ; zj. 36,95мВ; z 23,25мВ; .
5
z; 34,08 мВ; z 25,24 мВ.
Подставляя полученные результаты измерений в системы уравнений (18) и (19), получают М 1,585; d,7,139 К 1,472; Т, 5,008 10 .Таким образом определилась нелинейность преобразования входной мощности четырехполюсника 3 в постоянное напряжение, которая включает в себя нелинейность исследуемого четырехполюсника
3 и нелинейность преобразования выходной мощности в постоянное напряжение, а также нелинейность преобразования выходного сигнала четырехполюсника 3 в постоянное напряжение. Затем определяется относительная нелинейность амплитудной характеристики четырехполюсника 3 по формуле
с, (d, - T,)/b 1,823-10
-4
в таблице приведены значения входной мощности четырехполюсника 3,соответствующие значения относительной нелинейности преобразования входной мощности в постоянное напряжение, выходной мощности в постоянное напряжение, амплитудной характеристики четырехполюсника 3, которые рассчитаны, используя найденные коэффициенты с,, Т, и d (.
Как следует из табли11 1, максимальное значение относительной нелинейности исследуемого четырехполюсника 3 составляет 0,9%, а максиальное значение относительной нелинейности
0
g
0
5
0
5
0
преобразования выходного напряжения четырехполюсника 3 в постоянное напряжение составляет 2,3%. Таким образом, используя неточный квадратичный детектор 6, обеспечивается определение малых значений относительной нелинейности амплитудных характеристик четырехполюсников с приемлемой погрешностью без повьщ ения разрядности аналого-цифрового преобразователя измеряемого сигнала.
Формула изобретения
Устройство для определения относительной нелинейности амплитудных характеристик четырехполюсников, содержащее генератор, выход которого соединен с входом переменного аттенюатора, направленный ответвитель,один из выходов которого соединен с входом согласованной нагрузки, а другой выход подключен к входу квадратичного детектора, отличающееся тем, что, с целью повышения точности определения малых значений сигнала без повышения разрядности используемого аналого-цифрового преобразователя, в него введены аналого-цифровой преобразователь, два двухпозици- онных аттенюатора и вычислительный блок, при этом выход, переменного аттенюатора через первый двухио- зиционный аттенюатор соединен с первой клеммой устройства для подключения исследуемого четырехполюсника, вторая клемма которого через входной двухпозиционный аттенюатор соединена с входом направленного ответвителя, выход квадратичного детектора через аналого-цифровой преобразоватепь соединен с входом вычислительного блока
| Р.-П.П | |||
| Жилинскас | |||
| Измерители отношения;И их применение в радиоизмерительной технике | |||
| - М.: Советское радио, 1975, с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
