(Л
о сд оо со
00
Изобретение относится к машиностроению, в частности к сортировке конических роликов при производстве роликовых подшипников.
Цель изобретения - расширение технологических возможностей способа за счет обеспечения разделения потока конических роликов.
На фиг. 1 представлено устройство, реализующее предложенный способ, вид сбоку.
Устройство для разделения потока конических роликов по направлению их конуса имеет подающий лоток 1, по которому друг за другом спускают детали - ролики 2. В конце лотка 1 имеется просвет 3 протяженностью LI большей, чем длина / детали, над которым установлен закрепленный на лотке 1 жестко фиксируемый, но регулируемый по своему положе,нию относительно лотка 1 отводящий упор 4. Устройство регулировки положения упора 4 не показано. За просветом 3 (с расположенным над ним упором 4) расположен отводящий лоток 5 для приема роликов 2, разогнавшихся на подающем лотке 1 до некоторой скорости и идущих ориентированными узким торцом конуса вперед. Ролики 2, ориентированные широким торцом конуса вперед, сбиваются с их траектории отводящим упором 4, ударяясь в него своим широким торцом и в отводящий лоток 5 не попадают, а падают в зоне просвета 3 вниз.
Способ осуществляют следующим образом.
Лоток 1 по его длине L, углу наклона а и условиям трения на нем, определяемым результирующим коэффициентом трения f на нем деталей (с учетом формы профиля, размеров и материалов лотка и детали), выполнен с малым торможением и на нем деталей - роликов 2, позволяющим за время прохождения роликом 2 всей длины L лотка 1 приобрести в конце лотка 1 некоторую конечную наперед выбранную скорость V. Эта скорость детали в конце лотка определяется выражением
L V2gЦsiпa-f cosa), (1)
где V - выбранная скорость ролика 2 в момент его схода с лотка 1, м/с; а - ускорение ролика 2 на лотке 1 под действием ускорения силы тяжести,
L -длина лотка 1, м;
g - ускорение силы тяжести,
а - угол наклона лотка к горизонту;
/ - результирующий коэффициент трения ролика 2 о лоток 1.
При малом коэффициенте трения f и относительно большом угле наклона ос лотка 1 (малом /cosa. по сравнению с since.) выражение (1) может быть , заменено примерным выражением
V V2 L-sina (2)
из которого видно, что при малых коэффициентах трения и больших углах ос величина коэффициента трения и ее отклонение от некоторых малых средних значений мало влияет на конечную скорость V ролика 2 в момент его схода с лотка 1. Это говорит о том, что при описанных условиях на лотке 1 к моменту схода с него ролика 2 он приобретает достаточно стабильную наперед заданную по величине и направлению ско- 0 рость V.
Дальше ролику дана возможность одновременного наклонного равномерно-прямолинейного полета по инерции с неизменной скоростью У в ее направлении и одновремен5 ного участия и в свободном равноускоренном падении с ускорением силы тяжести g. При этом траектория полета ролика 2 равно ускоренно отклоняется от направления, лежащего на продолжении скорости V полета
Q по инерции.
Допустим, что дополнительное снижение центра тяжести ролика 2 по отношению к прямой, совпадающей со скоростью У, начинается с момента схода центра тяжести ролика 2 с лотка 1, который для упрощения
5 выражений и учитывая малость вносимой при этом погрешности вследствие малости угла конуса роликов будем считать равноудаленным от обоих торцов роликов.
С учетом справедливости принципа суперпозиции (наложения) ускорений, скорос0 тей и перемещений дополнительное снижение ролика 2 определяется выражением
Л 2
(3)
где h - дополнительное снижение центра 35тяжести детали 2 по отношению
к прямой, совпадающей со скоростью У, м;
g - ускорение силы тяжести, / - время, отсчитываемое от момента 40схода центра тяжести ролика 2 с
лотка 1, с.
Зная из (1) значение скорости У равномерного движения ролика 2 по инерции после его схода с лотка 1, определяем промежуток времени Л за который ролик 2 пройдет путь, 45 равный его длине /, т. е. промежуток времени через который в зону расположения переднего торца ролука в направлении скорости У перемещается его задний торец. Этот промежуток времени равен
(4,
50
А/ 55
у y2gL-(sinoc-fcosa)
где А/ - промежуток времени, за который ролик 2 перемещается в направлении скорости У на свою длину, с; / - длина ролика 2, м.
За этот промежуток времени ролик 2 в своем (одновременном с движением в направлении скорости У) падении вниз под дейA/i
(5)
14
ствием ускорения силы тяжести дополнительно перемещается вниз в соответствии с (3) на величину Д/:, равную
,
2 2 2
где Д/г - дополнительное приращение снижения траектории заднего торца //ролика 2 относительно прямой,
совпадающей с направлением скорости V, за время полета ролика на его длину, м;
-время полета ролика 2 от момента отрыва его от лотка 2 1 до занятия им начального контрольного положения, с;
-время продолжительности полета ролика 2 от начального до конечного контрольного положения, т. е. через которое задний торец ролика 2 занимает место, занимавшееся ранее передним торцом, с.
Учитывая, что время полета ролика 2 / от момента отрыва от лотка 1 до занятия роликом начального положения определяется выражением, аналогичным выражению (4), где вместо длины ролика / будет расстояние /о от конца лотка до центра тяжести ролика 2 в его учитываемом как начальное положении, выражение (5) с учетом (4) можем записать в виде
gC2g,+ g)g
t
М
Д/г
2(V2gL(sina-/cosa)f 2(/о+Ш
i (
4L(sina-/cosa)
где /о - расстояние от конца лотка до центра тяжести ролика 2 в его учитываемом как начальное положении.
Из; выражения (6) видно, что ролик 2 за время своего равномерного полета вдоль направления скорости V на расстояние, равное длине / ролика (после пролета некоторого начального расстояния /о), одновременно получает дополнительное приращение снижения на высоту ДЛ, определяемую этим выражением (6), т. е. задний торец ролика 2 пролетает зону предшествующего положения переднего торца на дополнительное Д/i ниже.
С учетом выражения (6) записываем выражение величины дополнительного приращения удаления траекории Дй заднего торца ролика 2 от прямой, совпадающей со скоростью V за время пролета роликом 2 в направлении скорости V на длину / в виде равенства.
. cosa,,f. +) 4L(sina fcosa)
(2/0+/)/ 4L(tga-n
где Дс/ - дополнительное приращение бокового удаления траектории заднего торца
(7)
ролика 2 от переднего по отнощению к прямой, совпадающий со скоростью V за время его пролета в направлении скорости V на длину ролика / м.
Введем понятие разновысотности верхних точек торцов роликов над лотком Дс/р. В частном случае, когда ролики прилегают к лотку одной своей образующей и имеют угол Y между образующей конуса и высотой, эта разновидность верхних точек торцов 10 роликов над лотком определяется выражением
.51п7,(8)
где / - длина конического ролика;
Y - угол между образующей конуса ролика и его высотой.
Разделив почленно правую и левую части выражений (7) на (8), получим
2/o-f/
15
20
Мр 8L(tga-Osinf
(9)
25
где К, - коэффициент, определяющий кратность дополнительного приращения бокового удаления траектории заднего торца ролика от переднего к разновысотности верхних точек торцов роликов над лотком.
При движении ролика 2 узким торцом вперед при f верхняя точка заднего широкого торца ролика 2 при его свободном полете пройдет через ту же точку пространства, через которую проходит верхняя точка переднего узкого торца ролика. При К и она пройдет соответственно ниже и выщё верхней точки переднего узкого торца.
35
40
55
При движении же ролика широким торцом вперед при любом К верхняя точка заднего узкого торца ролика всегда пройдет ниже верхней точки переднего широкого торца, которая в свою очередь всегда проходит выше той точки пространства, через которую проходит верхняя точка переднего узкого торца ролика, идущего узким торцом вперед. Отсюда следует, что при установлении упора 4 в некоторой точке пространства между той точкой пространства, через которую проходит верхняя точка переднего широкого торца и выше переднего узкого торца при , легко могут быть обеспечены условия для беспрепятственного прохождения мимо упора 4 роликов 2, идущих узким торцом вперед, и всегда будут задерживаться упором 4 ролики 2, идущих узким торцом 50 вперед, и всегда будут задерживаться упором 4 ролики 2, идущие широким торцом вперед.
Из (9) при К можем получить условия более уверенного прохождения мимо упора 4 заднего широкого торца роликов 2 при прохождении мимо него переднего узкого торца, что запишется в следующем виде:
45
(tga-/)sinv;
10)
I При К возможности приближения yijiopa 4 от пространственной точки прохож- д(ния верхней точки впереди идущего широ- к(|го торца ролика к пространственной точке П1|)охождения верхней точки впереди идуще- г(. узкого торца ролика соответственно монотс
нно с уменьшением К. сужаются.
Для определения условий выбора и подстройки местоположения жестко фиксируе- мэго отводящего упора 4 с максимально возможным его приближением к траектории в(фхней точки впереди идущего узкого торца и:( соотношения скоростей свободного полета ролика по инерции и его свободного полета в момент подхода переднего торца к упору 4 запишем равнозначное этому требованию условие, суть которого состоит в том, что к этому моменту времени результирующая оюрость движения ролика должна быть направлена по отношению к исходной скорости V под углом, равным или большим у: ла, .образуемого с лотком 1 (и скоростью V) верхней стороной ролика, т. е. угла 271. Vi3 преставленного на фиг. 1 векторного июбражения скоростей в этот момент времени запишем:
.tg2v.(11)
где Vn - скорость свободного падения ролика в момент подхода его переднего торца к упору 4. Остальные величины соответствуют принятым выше обозначениям. Из (11) с учетом вэфажепия скорости V согласно (1) и времени / через /о согласно (4) после простых преобразований имеем
2v,
:i2)
; 2L(tga-f) о|гкуда получаем условие в виде
(tga-/)tg2vi(13)
соблюдении которого упор 4 может быть 1у|аксимально приближен (с исключением прямого касания с роликом) к траектории верхней точки впереди идущего узкого тЬрца ролика.
Следует, что предпочтительно соблюде- Н|ие выражений (10) и (13). При этом погрешности, обусловленные возможностью HjeKOTOporo произвольного изменения коэффициента трения / ролика 2 на лотке 1 и скорости V ролика в конце лотка будут в меньшей степени влиять на правильность разделения потока и при этом не будет требоваться с точной подстройки положения упора 4, перекрытие которого с широким впереди идущим торцом отводимого им ролика может находиться в пределах большей части раз- новысотности верхних точек торцов роликов 2 над лотком 1, определяемой согласно (8), что-при малых углах конуса примерно равно разности диаметров щирокого и узко- го торцов роликов. Причем при предлагаемом способе и устройстве для отведения неправильно ориентированных по направлению конуса роликов из потока достаточно самого малейщего касания роликом 2 упоРз
Наряду же с отведением неправильно
ориентированных роликов в предлагаемом устройстве обеспечивается отведение из потока роликов других типов, имеющих боль- щие диаметры, т. е. предлагаемым устройством может быть осуществлена также сортировка роликов по их диаметру, а попадание в общую массу больших по размеру роликов не вызывает никаких неполадок, остановок или сбоев в работе устройства, что делает его более надежным, устойчивым
и безотказным в работе. Наряду с конструктивной простотой устройства и простотой его обслуживания имеется также очень существенное увеличение его пропускной способности по сравнению с известными.
Формула изобретения
1. Способ разделения потока конических деталей, заключающийся в последовательном перемещении их по на.клонному направляющему лотку и отведении из потока неправильно ориентированных деталей жестко
фиксируемым отводящим упором, установленным над движущимися деталями, отличающийся тем, что, с целью расщирения технологических возможностей способа за
счет обеспечения разделения потока конических роликов, отведение из потока неправильно ориентированных роликов осуществляют после схода роликов с лотка во время их полета по инерции и свободного падения. 2. Устройство для разделения потока
конических деталей, содержащее наклонные подводящий и отводящий лотки и упор, отличающееся тем, что между лотками выполнен просвет, а упор установлен над просветом.
Изобретение относится к сортировочной технике и позволяет расширить технологические возможности способа. Способ реализуется с помощью устройства, в котором между наклонным подводящим 1 и за ним расположенным отводящим 5 лотками предус.мотрен просвет 3 для свободного пролета роликов 2 протяженностью, превышающей длину ролика. Над этим просветом установлен отводящий упор 4, и этим упором сзо- бодно пролетающие в зоне просвета ролики за счет различия траекторий свободного пролета широких торцов конусов различно ориентированных роликов сбиваются с их траекторий, если они пролетают зону этого просвета щироким торцом конуса вперед, в то же время при полете в зоне просвета узким торцом конуса вперед траектория щи- рокого торца конуса проходит ниже и ролики беспрепятственно попадают в отводящий лоток, не задевая за отводящий упор. 2 с. п. ф-лы, 1 ил.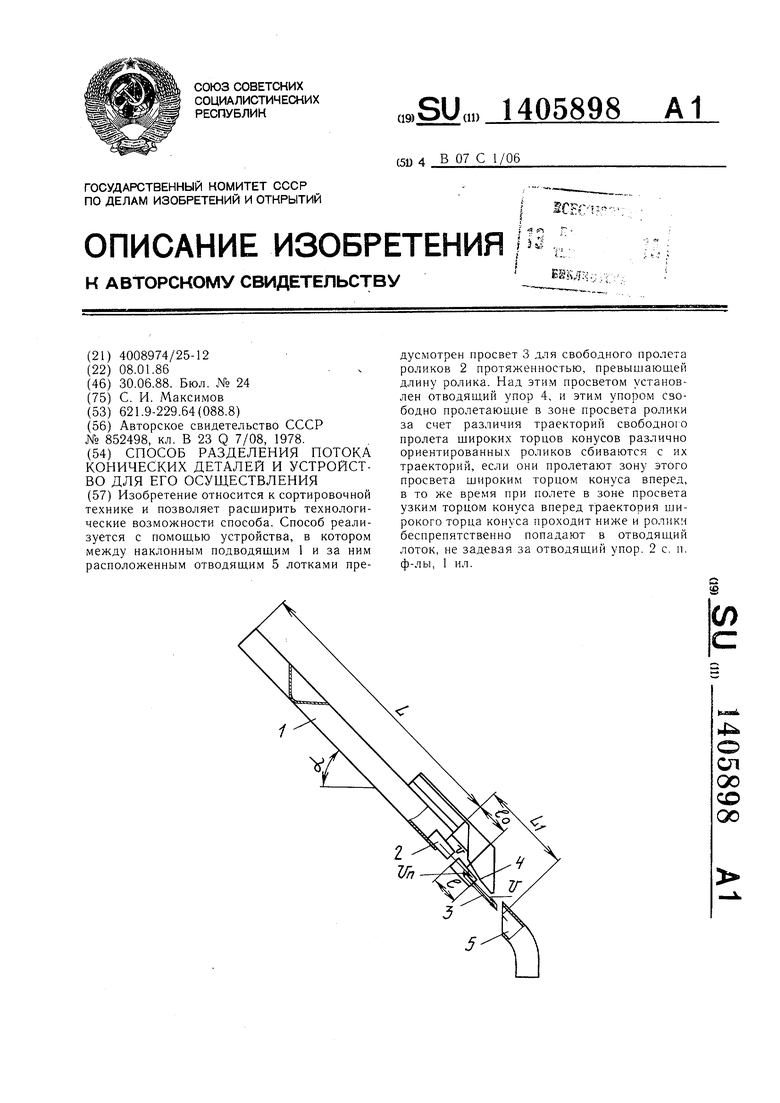
| Устройство для разделения потокаплАСТиНчАТыХ шТАМпОВАННыХ дЕТАлЕй | 1979 |
|
SU852498A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
