10
11423008
Изобретение относится к области сельскохозяйственного машиностроения, а именно к почвообрабатывающим орудиям, и может быть использовано для работы в рядах многолетних насаждений.
Цель изобретения - повышение качества обработки почвы.
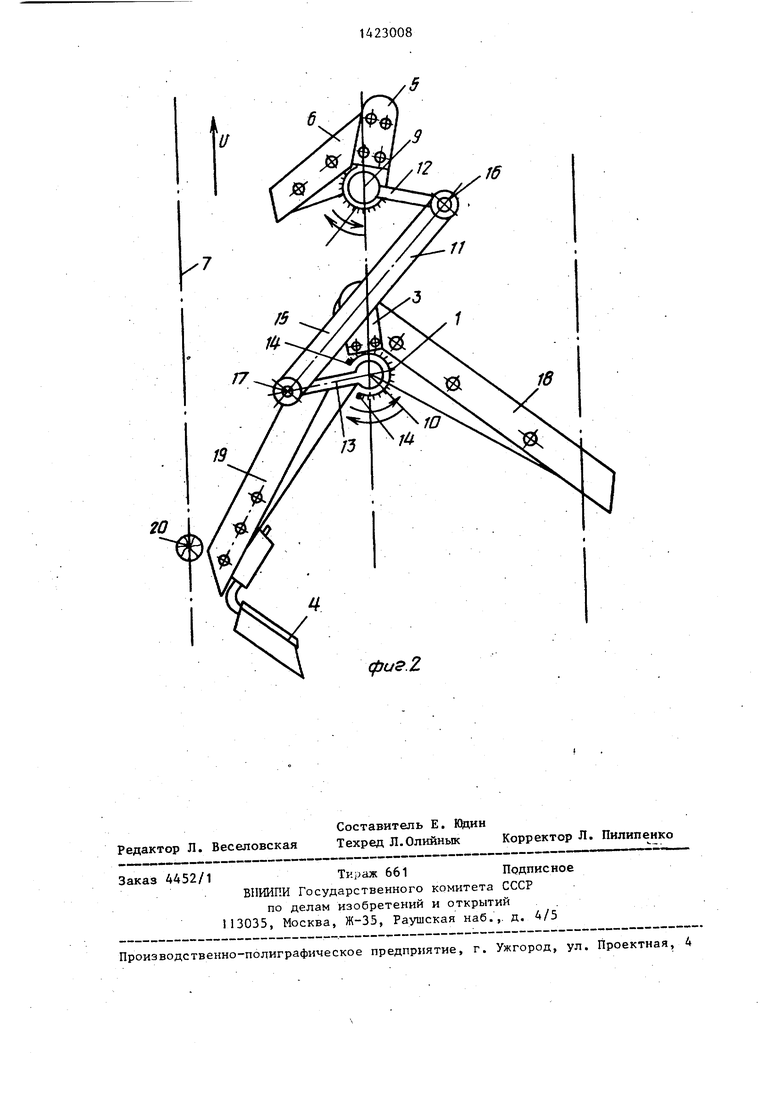
На фиг. -1 изображен рабочий орган для обработки почвы в рядах многолетних насаждений, вид сверху на фиг.2- рабочий орган в момент обхода куста. Рабочий орган для обработки почвы в рядах многолетних насаждений жит установленные на раме 1 с опорными колесами 2 плоскорезную лапу 3 с подпружиненным отпашником 4 и расположенную перед ней одностороннюю . лапу 5, Kiibuio 6 которой расположено со стороны ряда 7. На раме 1 могут быть смонтированы дополнительные культиваторные лапы 8 для обработки почвы в м€ .ждурядьях насаждений. Лапы 5 и 3 смонтированы на раме 1 посредством вертикальных шарниров 9 и 10 соответственно. Последние связаны между собой Z-образным трехзвенником 11. Звено 12 последнего жестко связано с шарниром 9, а звено 13 - с I шарниром 10. Лапа 5 и звено 12 рас- положены по разные стороны относительно продольно-вертикальной плоскости, преходящей через шарниры 9 и 10. Звекья 12 и 13 направлены в противоположные стороны. Звено 13 снабжено ограничителем 14. Среднее звено 15 трехзвенника 11 связано с крайними звеньями 12 и 13 посредством шарниров 16 и 17 соответствен- по. Плоскорезная лапа 3 имеет два крыла 18 v: 19. На крыле 19, расположенном со стороны ряда 7 растений 20, закреплен отпашник 4. Длина крьша 6 лапы 5 меньше, чем длина каждого И5 крыльев 18 и 19 лапы 3.
рядья. Звено 12 трехзвенника 11 через звенья 15 и 13 передает силу сопротивления почвы на плоскорезную лапу 3.
На крыло 18 лапы 3 также действует сила сопротивления почвы, стремящаяся повернуть лапу 3 в сторону ряда 7, при этом отпашник 4 также стремится повернуть лапу 3 в сторону ряда 7. . .
Часть ширины захвата крьша 19 обрабатывается ножом 6, а сумма сил сопротивления почвы, действующая на содер- 5 крылья 6, 18 и отпашник 4, больше, чем сила сопротивления почвы крылу 19, при этом последний надежно удерживается в ряду растений.
При встрече крыла 19 с растением 20 лапа 3 поворачивается в шарнире 10, поворачивая лапу 5 в шарнире 9, при этом ширина захвата крыльев 6 и 18 увеличивается, вследствие чего увеличивается сила сопротивления почвы.
После прохождения крьиом 19 расте - ния 20 силы сопротивления почвы, действующие на крылья 6, 18 и отпашник 4, быстро возвращают лапу 3 в исход- hoe положение.
20
25
30
35
40
45
Формулаизобретения
Рабочий орган для обработки почвы в рядах многолетних насаждений, содержащий установленные на раме посредством вертикальных шарниров плос- корезную и одностороннюю лапы, отличающийся тем, что, с целью повьшения качества обработки почвы, рабочий орган снабжен имеющим Z- образную форму трехзвенником, одно из крайних звеньев которого жестко связано с шарниром односторонней лапы, а другое крайнее звено трехзвенника жестко - с шарниром плоскорез- ной лапы, при этом последняя расположена за односторонней лапой, а длина каждого из крьшьев больше, чем длина крьша односторонней лапы, при- 50 чем последняя и звено трехзвенника, связанное с ее шарниром, размещены по разные стороны относительно продольно-вертикальной плоскости, проходящей через шарниры лап.
Рабочий орган работает следующим образом.
При движении рабочего органа лапы 3 и 5 заглубляются в почву и рыхлят ее, при этом на одностороннюю лапу 5 действует сопротивление почвы, стремящееся повернуть крьшо 6 от носительно шарнира 9 в сторону между5
0
5
Формулаизобретения
Рабочий орган для обработки почвы в рядах многолетних насаждений, содержащий установленные на раме посредством вертикальных шарниров плос- корезную и одностороннюю лапы, отличающийся тем, что, с целью повьшения качества обработки почвы, рабочий орган снабжен имеющим Z- образную форму трехзвенником, одно из крайних звеньев которого жестко связано с шарниром односторонней лапы, а другое крайнее звено трехзвенника жестко - с шарниром плоскорез- ной лапы, при этом последняя расположена за односторонней лапой, а длина каждого из крьшьев больше, чем длина крьша односторонней лапы, при- 0 чем последняя и звено трехзвенника, связанное с ее шарниром, размещены по разные стороны относительно продольно-вертикальной плоскости, проходящей через шарниры лап.
фиг2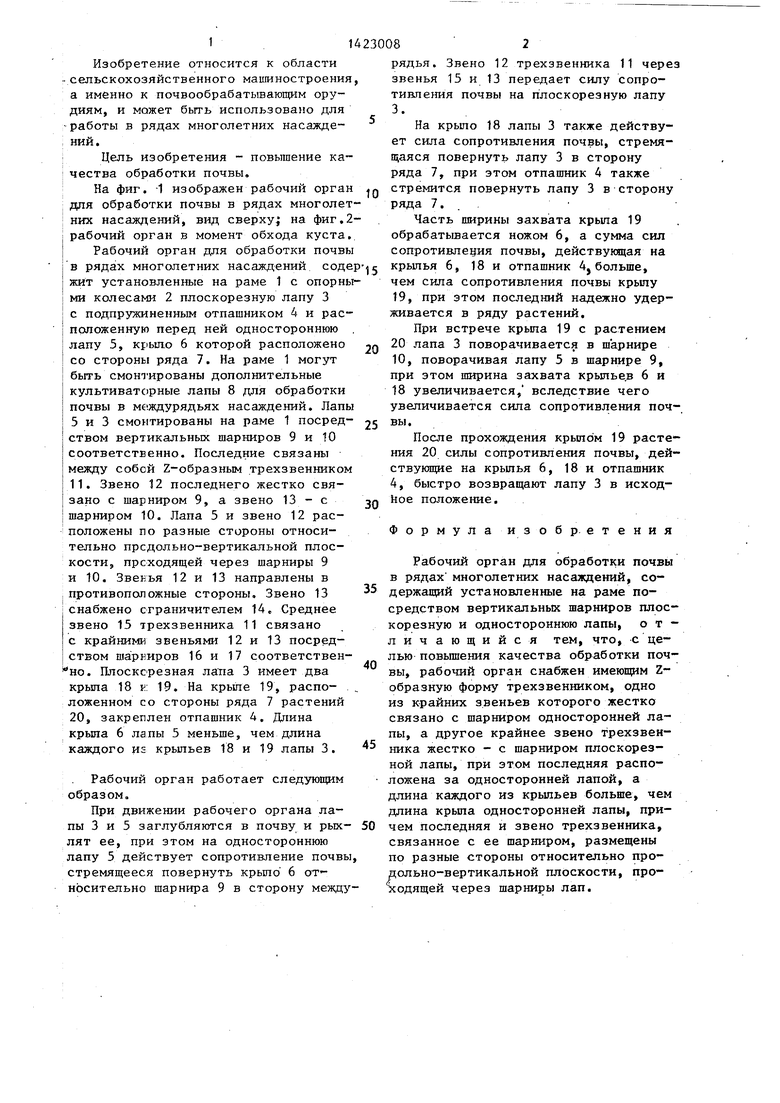
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННОЕ ОРУДИЕ ДЛЯ ОБРАБОТКИ ПОЧВЫ МЕЖДУРЯДИЙ И РЯДОВ МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 1992 |
|
RU2050085C1 |
| Рабочий орган для обработки почвы в рядах многолетних насаждений | 1985 |
|
SU1375150A1 |
| Комбинированное почвообрабатывающее орудие | 1989 |
|
SU1701131A1 |
| Рабочий орган для обработки почвы в рядах растений | 1987 |
|
SU1426481A1 |
| Рабочий орган для обработки почвы в рядах виноградника | 1985 |
|
SU1248540A1 |
| Рабочий орган культиватора для обработки почвы в садах и виноградниках | 1982 |
|
SU1083933A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ В РЯДАХ МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2003 |
|
RU2251237C1 |
| Почвообрабатывающее орудие | 1990 |
|
SU1792235A3 |
| Рабочий орган для обработки почвы в рядах виноградника | 1987 |
|
SU1456029A2 |
| РЫХЛИТЕЛЬ-ЩЕЛЕРЕЗ | 2008 |
|
RU2452157C2 |
Изобретение относится к области сельскохозяйственного машиностроения. Цель изобретения - повышение качества обработки почвы. Рабочий орган для обработки почвы содержит установленные на раме 1 посредством вертикальных шарниров 9, 10 одностороннюю 5 и плоскорезную 3 лапы. Звено 12 Z- образного трехзвенника 11 жестко связано с шарниром 9, а звено 13 жестко связано с шарниром 10. Лапа 3 расположена за лапой 5, а длина ее крыльев 18, 19 больше, чем длина крыла 6 лапы 5. Лапа 5 и звено 12 трехзвенника 11 расположены по разные стороны относительно продольно-вертикальной плоскости, проходящей через шарниры 9, 10. При движении рабочего органа сила сопротивления почвы, действующая на крылья 6 и 18, удерживает крыло 19 лапы 3 в ряду 7 растений 20. 2 ил. Zv С/)
| Авторское свидетельство СССР И 725502, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочий орган для обработки почвы в рядах многолетних насаждений | 1985 |
|
SU1375150A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
