(f.
с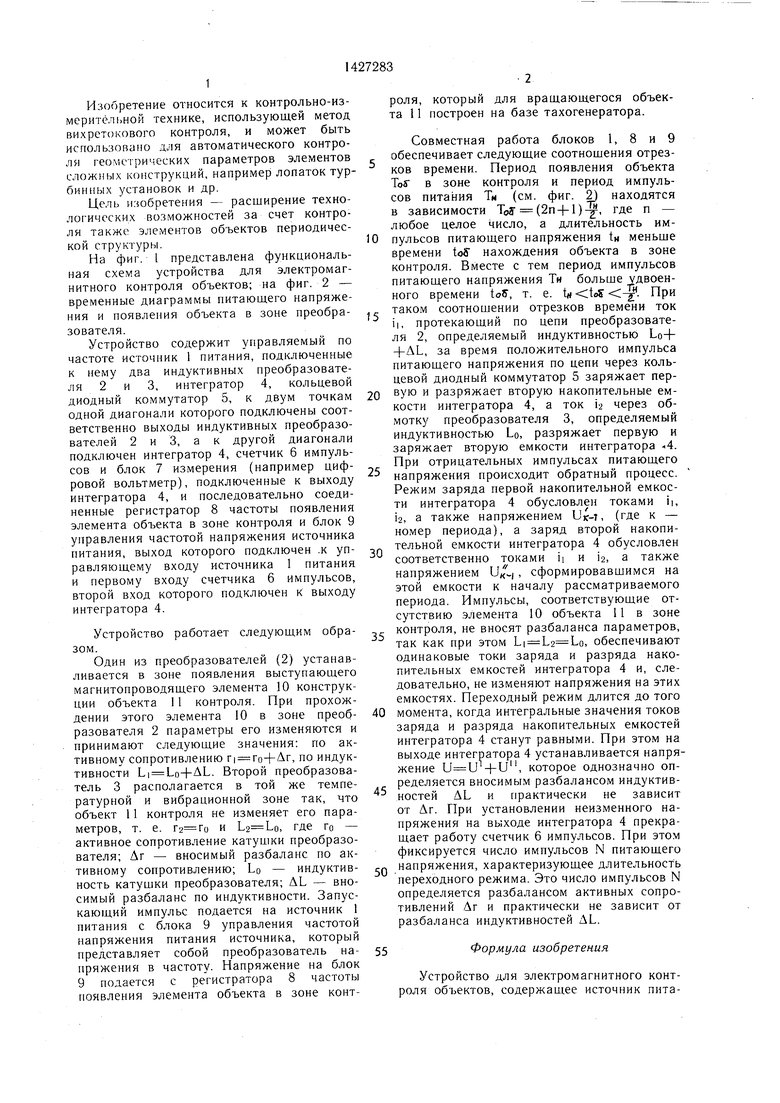
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электромагнитного контроля объектов | 1989 |
|
SU1619155A2 |
| Устройство для электромагнитного контроля геометрических параметров объектов сложной конструкции | 1990 |
|
SU1770886A1 |
| Аналого-цифровой преобразователь | 1979 |
|
SU822346A1 |
| Устройство контроля положения оси привариваемого ребра к листу из немагнитных материалов | 1984 |
|
SU1232410A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1991 |
|
RU2025322C1 |
| Аналого-цифровой преобразователь | 1979 |
|
SU822345A1 |
| Устройство для бесконтактной передачи сигналов с вращающегося объекта | 1977 |
|
SU714150A1 |
| Устройство для измерения сдвига фаз | 1986 |
|
SU1339893A1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ УФ-ИЗЛУЧЕНИЯ ГАЗОРАЗРЯДНЫХ ЛАМП | 2005 |
|
RU2304007C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДАВЛЕНИЯ МЕТАЛЛА НА ВАЛКИ СТАНОВ ПЕРИОДИЧЕСКОЙ ПРОКАТКИ | 1969 |
|
SU241765A1 |
Изобретение относится к контрольно- измерительной технике и м. б. использовано в системах автоматического контроля геометрических параметров сложных конструкций. Устройство позволяет расширить технологические возможности измерительных устройств, построенных на принципе использования коммутативных интегрирующих схем, так как обеспечивает возможность измерения разбаланса параметров цепи преобразователя, вносимого влиянием элемента объекта контроля, периодически появляющегося в зоне датчика. Устройство содержит управляемый источник питания (напряжения прямоугольной формы), два преобразователя, кольцевой диодный коммутатор, интегратор, блок измерения, счетчик импульсов, а также регистратор появления объекта в зоне контроля и блок управления частотой напряжения источника питания. 2 ил.
4::
tc
Ч
ьс
ОС ос
Изобретение относится к контрольно-из- мерите.п1)НОЙ технике, использующей метод вихретокового контроля, и может быть использовано для автоматического контроля геометрических параметров элементов сложных конструкций, например лопаток турбинных установок и др.
Цель изобретения - расширение технологических возможностей за счет контроля также элементов объектов периодической структуры.
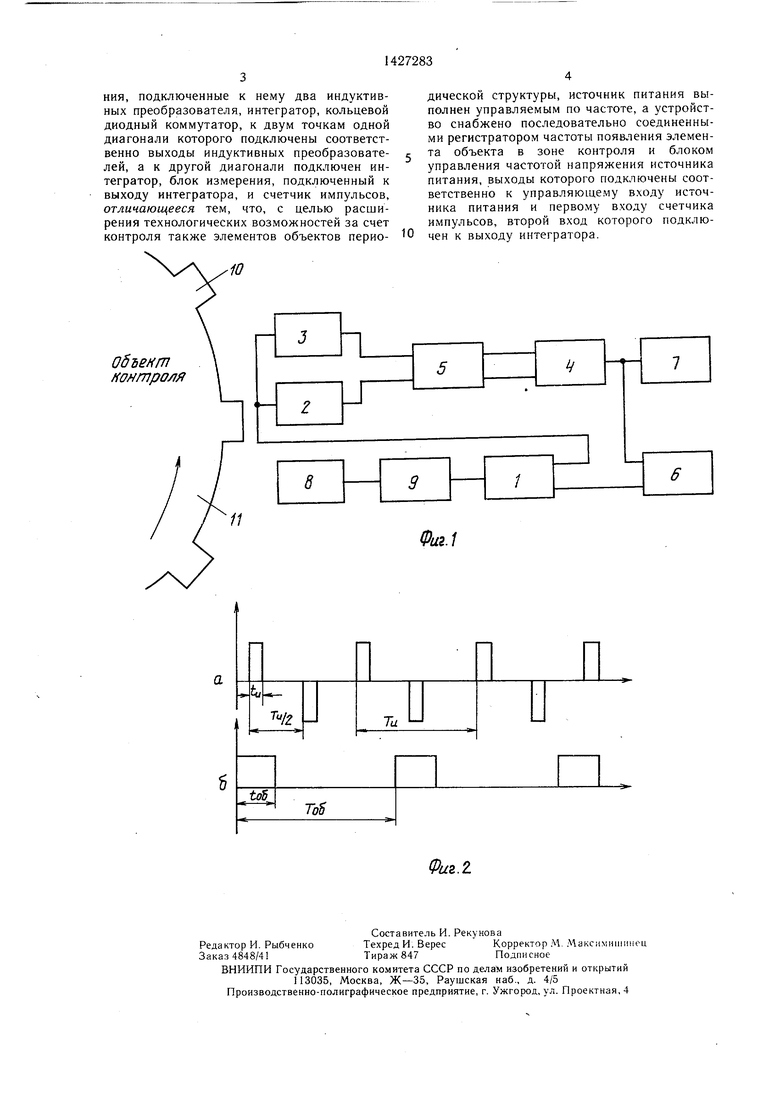
На фиг. I представлена функциональная схема устройства для электромагнитного контроля объектов; на фиг. 2 - временные диаграммы питающего напряжения и появления объекта в зоне преобразователя.
Устройство содержит управляемый по частоте источник 1 питания, подключенные к нему два индуктивных преобразователя 2 и 3, интегратор 4, кольцевой диодный коммутатор 5, к двум точкам одной диагонали которого подключены соответственно выходы индуктивных преобразователей 2 и 3, а к другой диагонали подключен интегратор 4, счетчик 6 импульсов и блок 7 измерения (например цифровой вольтметр), подключенные к выходу интегратора 4, и последовательно соединенные регистратор 8 частоты появления элемента объекта в зоне контроля и блок 9 управления частотой напряжения источника питания, выход которого подключен .к управляющему входу источника 1 питания и первому входу счетчика 6 импульсов, второй вход которого подключен к выходу интегратора 4.
Устройство работает следующим образом.
Один из преобразователей (2) устанавливается в зоне появления выступающего магнитопроводящего элемента 10 конструкции объекта 11 контроля. При прохождении этого элемента 10 в зоне преобразователя 2 параметры его изменяются и принимают следующие значения: по активному сопротивлению Г| го+Дг, по индуктивности Li Lo-bAL. Второй преобразователь 3 располагается в той же температурной и вибрационной зоне так, что объект 11 контроля не изменяет его параметров, т. е. и , где го - активное сопротивление катушки преобразователя; Аг - вносимый разбаланс по активному сопротивлению; LO - индуктивность катушки преобразователя; ЛЬ - вносимый разбаланс по индуктивности. Запускающий импульс подается на источник 1 питания с блока 9 управления частотой напряжения питания источника, который представляет собой преобразователь напряжения в частоту. Напряжение на блок 9 подается с регистратора 8 частоты появления элемента объекта в зоне конт5
0
5
роля, который для вращающегося объекта 11 построен на базе тахогенератора.
Совместная работа блоков 1, 8 и 9 обеспечивает следующие соотношения отрезков времени. Период появления объекта ToS в зоне контроля и период импульсов питания Тм (см. фиг. 2) находятся в зависимости ТоУ (2п-|-1), где п - любое целое число, а длительность им0 пульсов питающего напряжения 1м меньше времени toS нахождения объекта в зоне контроля. Врлесте с тем период импульсов питающего напряжения Тн больше удвоенного времени toS, т. е. . При таком соотношении отрезков времени ток ii, протекающий по цепи преобразователя 2, определяемый индуктивностью LO+ +ДЬ, за время положительного импульса питающего напряжения по цепи через кольцевой диодный коммутатор 5 заряжает первую и разряжает вторую накопительные емкости интегратора 4, а ток i2 через обмотку преобразователя 3, определяемый индуктивностью LO, разряжает первую и заряжает вторую емкости интегратора -.4. При отрицательных импульсах питающего напряжения происходит обратный процесс. Режим заряда первой накопительной емкости интегратора 4 обусловлен токами ii, 2, а также напряжением УК-Т, (где к - номер периода), а заряд второй накопительной емкости интегратора 4 обусловлен соответственно токами ii и 2, а также напряжением U,f-| , сформировавшимся на этой емкости к началу рассматриваемого периода. Импульсы, соответствующие отсутствию элемента 10 объекта 11 в зоне контроля, не вносят разбаланса параметров, так как при этом Li , обеспечивают одинаковые токи заряда и разряда накопительных емкостей интегратора 4 и, следовательно, не изменяют напряжения на этих емкостях. Переходный режим длится до того
0 момента, когда интегральные значения токов заряда и разряда накопительных емкостей интегратора 4 станут равными. При этом на выходе интегратора 4 устанавливается напряжение -f-U, которое однозначно определяется вносимым разбалансом индуктив- ностей AL и практически не зависит от Аг. При установлении неизменного напряжения на выходе интегратора 4 прекращает работу счетчик 6 импульсов. При этом фиксируется число импульсов N питающего
0 напряжения, характеризующее длительность переходного режима. Это число импульсов N определяется разбалансом активных сопротивлений Аг и практически не зависит от разбаланса индуктивностей AL.
5Формула изобретения
Устройство для электромагнитного контроля объектов, содержащее источник пита0
5
5
ния, подключенные к нему два индуктивных преобразователя, интегратор, кольцевой диодный коммутатор, к двум точкам одной диагонали которого подключены соответственно выходы индуктивных преобразователей, а к другой диагонали подключен интегратор, блок измерения, подключенный к выходу интегратора, и счетчик импульсов, отличающееся тем, что, с целью расширения технологических возможностей за счет контроля также элементов объектов периоfO
Объенгп контроля
11
дической структуры, источник питания выполнен управляемым по частоте, а устройство снабжено последовательно соединенными регистратором частоты появления элемента объекта в зоне контроля и блоком управления частотой напряжения источника питания, выходы которого подключены соответственно к управляющему входу источника питания и первому входу счетчика импульсов, второй вход которого подключен к выходу интегратора.
Фиг.1
| Толстоногова М | |||
| Г., Фалкина В | |||
| Д | |||
| Двухмерный преобразователь | |||
| - Депонированные научные работы, ВИНИТИ, 1984, № 2. |
